Спосіб інтелектуальної діагностики виробничих об’єктів
Номер патенту: 67741
Опубліковано: 12.03.2012
Автори: Ларін Віталій Юрійович, Чичикало Ніна Іванівна, Харченко Володимир Петрович, Федоров Євген Євгенович, Купцова Катерина Юріївна



Формула / Реферат
Спосіб інтелектуальної діагностики виробничих об'єктів, заснований на аналізі акустичних або вібраційних сигналів методами цифрової обробки сигналу, у процесі якого, використовують нейронну мережу, нечітку логіку, генетичний алгоритм, експертну систему, розпізнавання акустичних і вібраційних образів, який відрізняється тим, що на дослідних стендах у процесі виготовлення й налагодження формують акустичний або вібраційний паспорт об'єкта, для чого: для кожного вузла й об'єкта вимірюють акустичні або вібраційні сигнали, які характеризують його технічний номінальний стан; після чого перетворюють їх до векторів ознак за допомогою дискретного Фур'є- або вейвлет-перетворення; і на основі отриманих векторів ознак формують еталони, які використовують як усереднену характеристику його технічного номінального стану; потім адаптують структуру нечіткої нейромережі, за допомогою якої розпізнають стан об'єкта; після чого вибирають показники якості, за допомогою яких оцінюють точність, швидкодію й надійність; далі обчислюють за допомогою генетичного алгоритму параметри нейромережі й уточнюють значення еталонів з урахуванням заданих показників якості; потім задають правила бази знань експертної системи, за допомогою яких визначають номінальний стан вузлів й об'єкта в цілому й формують їх паспорт; а на стадії експлуатації вимірюють і перетворюють акустичний або вібраційний сигнал до вектора ознак; який зіставляють із паспортними даними вузлів й об'єктів за допомогою нейромережі; після чого на основі застосування правил експертної системи за результатами розпізнавання приймають рішення, відповідно до якого виробляють керуючий вплив.
Текст
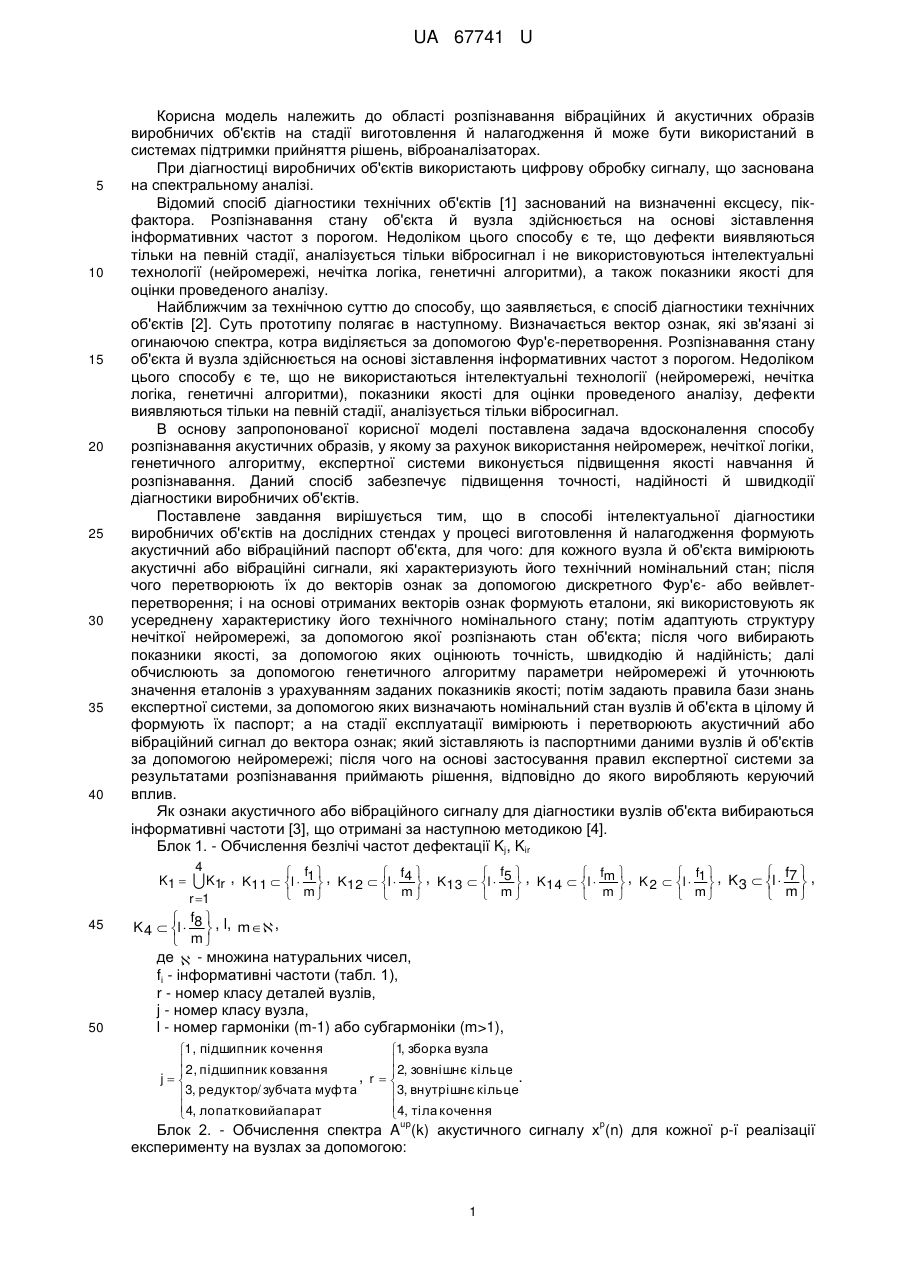
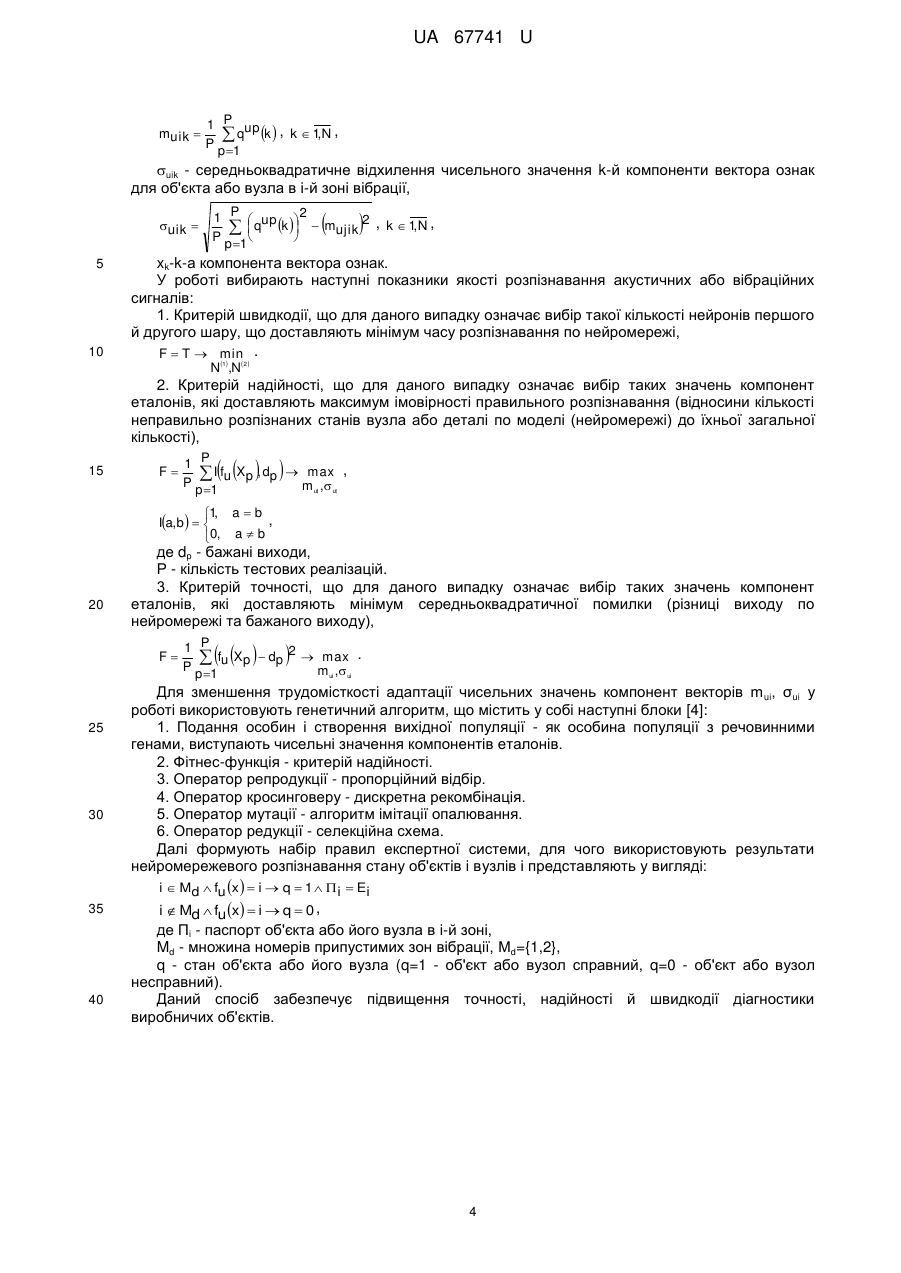
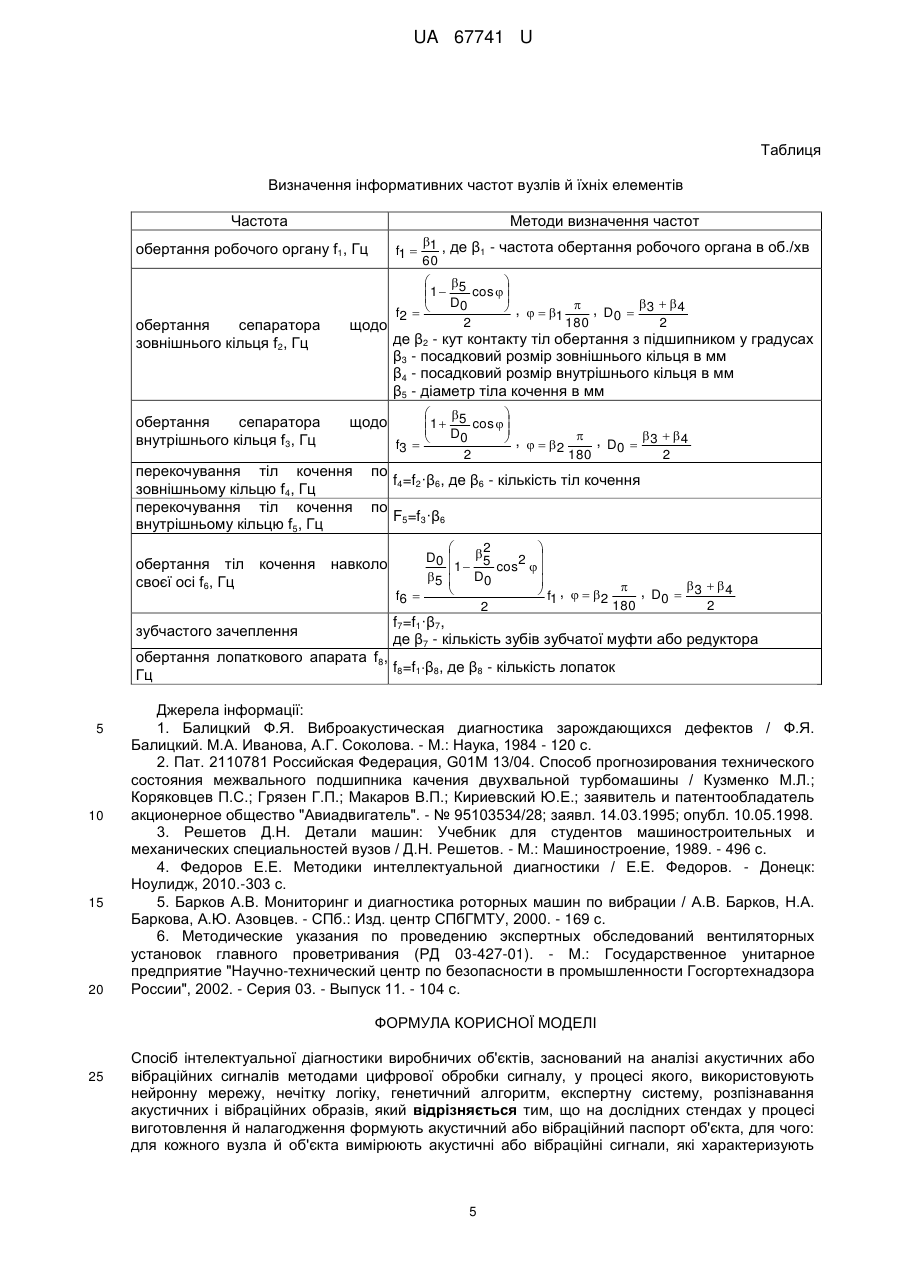
Реферат: Спосіб інтелектуальної діагностики виробничих об'єктів, при якому на дослідних стендах у процесі виготовлення й налагодження формують акустичний або вібраційний паспорт об'єкта, для чого: для кожного вузла й об'єкта вимірюють акустичні або вібраційні сигнали, які характеризують його технічний номінальний стан; після чого перетворюють їх до векторів ознак за допомогою дискретного Фур'є- або вейвлет-перетворення; і на основі отриманих векторів ознак формують еталони, які використовують як усереднену характеристику його технічного номінального стану; потім адаптують структуру нечіткої нейромережі, за допомогою якої розпізнають стан об'єкта; після чого вибирають показники якості, за допомогою яких оцінюють точність, швидкодію й надійність; далі обчислюють за допомогою генетичного алгоритму параметри нейромережі й уточнюють значення еталонів з урахуванням заданих показників якості; потім задають правила бази знань експертної системи, за допомогою яких визначають номінальний стан вузлів й об'єкта в цілому й формують їх паспорт; а на стадії експлуатації вимірюють і перетворюють акустичний або вібраційний сигнал до вектора ознак; який зіставляють із паспортними даними вузлів й об'єктів за допомогою нейромережі; після чого на основі застосування правил експертної системи за результатами розпізнавання приймають рішення, відповідно до якого виробляють керуючий вплив. UA 67741 U (54) СПОСІБ ІНТЕЛЕКТУАЛЬНОЇ ДІАГНОСТИКИ ВИРОБНИЧИХ ОБ'ЄКТІВ UA 67741 U UA 67741 U 5 10 15 20 25 30 35 40 Корисна модель належить до області розпізнавання вібраційних й акустичних образів виробничих об'єктів на стадії виготовлення й налагодження й може бути використаний в системах підтримки прийняття рішень, віброаналізаторах. При діагностиці виробничих об'єктів використають цифрову обробку сигналу, що заснована на спектральному аналізі. Відомий спосіб діагностики технічних об'єктів [1] заснований на визначенні ексцесу, пікфактора. Розпізнавання стану об'єкта й вузла здійснюється на основі зіставлення інформативних частот з порогом. Недоліком цього способу є те, що дефекти виявляються тільки на певній стадії, аналізується тільки вібросигнал і не використовуються інтелектуальні технології (нейромережі, нечітка логіка, генетичні алгоритми), а також показники якості для оцінки проведеного аналізу. Найближчим за технічною суттю до способу, що заявляється, є спосіб діагностики технічних об'єктів [2]. Суть прототипу полягає в наступному. Визначається вектор ознак, які зв'язані зі огинаючою спектра, котра виділяється за допомогою Фур'є-перетворення. Розпізнавання стану об'єкта й вузла здійснюється на основі зіставлення інформативних частот з порогом. Недоліком цього способу є те, що не використаються інтелектуальні технології (нейромережі, нечітка логіка, генетичні алгоритми), показники якості для оцінки проведеного аналізу, дефекти виявляються тільки на певній стадії, аналізується тільки вібросигнал. В основу запропонованої корисної моделі поставлена задача вдосконалення способу розпізнавання акустичних образів, у якому за рахунок використання нейромереж, нечіткої логіки, генетичного алгоритму, експертної системи виконується підвищення якості навчання й розпізнавання. Даний спосіб забезпечує підвищення точності, надійності й швидкодії діагностики виробничих об'єктів. Поставлене завдання вирішується тим, що в способі інтелектуальної діагностики виробничих об'єктів на дослідних стендах у процесі виготовлення й налагодження формують акустичний або вібраційний паспорт об'єкта, для чого: для кожного вузла й об'єкта вимірюють акустичні або вібраційні сигнали, які характеризують його технічний номінальний стан; після чого перетворюють їх до векторів ознак за допомогою дискретного Фур'є- або вейвлетперетворення; і на основі отриманих векторів ознак формують еталони, які використовують як усереднену характеристику його технічного номінального стану; потім адаптують структуру нечіткої нейромережі, за допомогою якої розпізнають стан об'єкта; після чого вибирають показники якості, за допомогою яких оцінюють точність, швидкодію й надійність; далі обчислюють за допомогою генетичного алгоритму параметри нейромережі й уточнюють значення еталонів з урахуванням заданих показників якості; потім задають правила бази знань експертної системи, за допомогою яких визначають номінальний стан вузлів й об'єкта в цілому й формують їх паспорт; а на стадії експлуатації вимірюють і перетворюють акустичний або вібраційний сигнал до вектора ознак; який зіставляють із паспортними даними вузлів й об'єктів за допомогою нейромережі; після чого на основі застосування правил експертної системи за результатами розпізнавання приймають рішення, відповідно до якого виробляють керуючий вплив. Як ознаки акустичного або вібраційного сигналу для діагностики вузлів об'єкта вибираються інформативні частоти [3], що отримані за наступною методикою [4]. Блок 1. - Обчислення безлічі частот дефектації Kj, Kir K1 45 50 4 K1r , f f f f f f K11 l 1 , K12 l 4 , K13 l 5 , K14 l m , K 2 l 1 , K 3 l 7 , m m m m m m r 1 f8 , l, K 4 l m , m де - множина натуральних чисел, fі - інформативні частоти (табл. 1), r - номер класу деталей вузлів, j - номер класу вузла, l - номер гармоніки (m-1) або субгармоніки (m>1), 1, підшипник кочення 1, зборка вузла 2, зовнішнє кільце 2, підшипник ковзання , r . j 3, редуктор/ зубчата муфта 3, внутрішнє кільце 4, лопатковийапарат 4, тіла кочення up р Блок 2. - Обчислення спектра A (k) акустичного сигналу х (n) для кожної р-ї реалізації експерименту на вузлах за допомогою: 1 UA 67741 U - прямого дискретного перетворення Фур'є (ДПФ) Xp k 1р 5 N1 xp ne j2 / Nnk , k 0, N 1, n0 р А (k)=|Х (k)|, k 0, N 1, де N - довжина сигналу; - прямого дискретного вейвлет-перетворення (ДВП) dlm a01 / 2 N / 2l1 1 N / 2l1 1 p c l1 ngn 2m , c lm a01 / 2 c l1 nhn 2m , c0n=x (n), , , n 0 n 0 , k m m 0,N / 2L 1 1 c , m 0,N / 2l1 1 , A 2p k Lm d , k N / 2l m m 0,N / 2l 1 1 l 1,L lm 10 де сlm, dlm - коефіцієнти ДВП, які апроксимують і деталізують, L - кількість рівнів розкладання. uр Блок 3. - Локалізація максимумів у спектрі А (k) up up up up A up k A k , A k 1 A k A k 1 , u 1,2 . 0, інакше Блок 4. - Граничні обмеження в спектрі A up k N A up k up up k 0 - поріг, u 1,2 . A up k A k , A k T , T N 0, інакше A up k sign k 0 15 Блок 5. - Обмеження по множинам частот дефектації - для вузлів up up up k A k , A k 0 k K j , u 1,2 ; q 0, інакше - для деталей вузлів up up up k A k , A k 0 k K jr , u 1,2 . q 0, інакше 20 25 У результаті формуються наступні системи ознак вузла й деталі вузла up up up Q =(q (0),…, q (N-1)). Визначення частот вузлів та їхніх елементів наведено у табл. Як ознаки акустичного або вібраційного сигналу довжиною N для діагностики об'єкта вибирають середньоквадратичне значення, пік-фактор й ексцес [5], які виділяють за допомогою наступної методики [4]: р р Блок 1. - Обчислення спектра В (k) акустичного сигналу х (n) для кожної р-ї навчальної реалізації вузлів за допомогою прямого ДПФ: Xp k р 30 N1 xp ne j2 / Nnk , k 0, N 1, n0 р B (k)=|Х (k)|, k 0, N 1, де N - довжина сигналу. Блок 2. - Виділення смуги спектра сигналу на основі частотних діапазонів для об'єкта [k1,k2] і його вузла [k1j, k2j]: p Bp k B k , k1 k k 2 , 0, інакше k1 min k1j , k 2 max k 2 j , j j Bp k , k1 k k 2 p j j. B k j 0, інакше 35 Блок 3. - Обчислення зворотного перетворення Фур'є: 2 UA 67741 U 1 N1 p Bp n B k e j2 / Nnk , n 0, N 1, N k 0 p 1 N1 p B n B j k e j2 / Nnk , n 0, N 1. j N k 0 Блок 4. - Обчислення середньоквадратичного значення (СКЗ), пік-фактора й ексцесу: - для об'єктів 5 1 N1 p 2 , B k N n 0 p max B n 3p 1 n0,N1 , q ~ Bp 1 q3p 0 q3p 2 4 3 , 2 2 4 N1 1 N1 p p n , B n 1 4 B N N n 0 n 0 2 2 1 N1 p 1 N1 p B n 2 B n , 2 N N n 0 n 0 10 - для вузлів об'єктів 1 N1 p 2 , B j n N n 0 ~p max B n j n0,N1 , q3p 1 ~p B 1 j q3p 0 4 j q3p 2 3, 2 2j 4j 15 4 N1 1 N1 p p B n 1 B n , j j N N n0 n0 2 2 N1 1 N1 p p 2 1 B n B j n . 2j N j N n 0 n 0 У результаті формують наступні системи ознак 3p 3p 3р 3р Q =(q (0),q (1),q (2)). up Вектори ознак Q формують для кожної і-ї зони вібрації [6] об'єкта й вузлів об'єкта 1, зона А 2, зона В . i 3, зона С 4, зона D 20 Розпізнавання стану об'єкта й вузла виробляють на основі відповідної нечіткої мережі [4], яка обчислює номер зони вібрації й представлена у вигляді 2 x muik , i 14 , k 1 N . fu x arg max min exp k , , uik k i де muik - математичне очікування чисельного значення k-ї компоненти u-го вектора ознак для об'єкта або вузла в і-ї зони вібрації, 3 UA 67741 U muik 1 P up , q k k 1,N , P p 1 uik - середньоквадратичне відхилення чисельного значення k-й компоненти вектора ознак для об'єкта або вузла в i-й зоні вібрації, uik 5 10 1 P up 2 q k mujik 2 , k 1,N , P p 1 xk-k-а компонента вектора ознак. У роботі вибирають наступні показники якості розпізнавання акустичних або вібраційних сигналів: 1. Критерій швидкодії, що для даного випадку означає вибір такої кількості нейронів першого й другого шару, що доставляють мінімум часу розпізнавання по нейромережі, F T min . N1 ,N2 2. Критерій надійності, що для даного випадку означає вибір таких значень компонент еталонів, які доставляють максимум імовірності правильного розпізнавання (відносини кількості неправильно розпізнаних станів вузла або деталі по моделі (нейромережі) до їхньої загальної кількості), 15 F 1 P I fu Xp , dp max , P m ut , ut p 1 , 1 a b , Ia,b 0, a b 20 де dp - бажані виходи, Р - кількість тестових реалізацій. 3. Критерій точності, що для даного випадку означає вибір таких значень компонент еталонів, які доставляють мінімум середньоквадратичної помилки (різниці виходу по нейромережі та бажаного виходу), F 25 30 35 40 1 P fu Xp dp 2 max . P m ui , ui p 1 Для зменшення трудомісткості адаптації чисельних значень компонент векторів m ui, σui у роботі використовують генетичний алгоритм, що містить у собі наступні блоки [4]: 1. Подання особин і створення вихідної популяції - як особина популяції з речовинними генами, виступають чисельні значення компонентів еталонів. 2. Фітнес-функція - критерій надійності. 3. Оператор репродукції - пропорційний відбір. 4. Оператор кросинговеру - дискретна рекомбінація. 5. Оператор мутації - алгоритм імітації опалювання. 6. Оператор редукції - селекційна схема. Далі формують набір правил експертної системи, для чого використовують результати нейромережевого розпізнавання стану об'єктів і вузлів і представляють у вигляді: i Md fu x i q 1 i Ei i Md fu x i q 0 , де Пi - паспорт об'єкта або його вузла в і-й зоні, Md - множина номерів припустимих зон вібрації, Мd={1,2}, q - стан об'єкта або його вузла (q=1 - об'єкт або вузол справний, q=0 - об'єкт або вузол несправний). Даний спосіб забезпечує підвищення точності, надійності й швидкодії діагностики виробничих об'єктів. 4 UA 67741 U Таблиця Визначення інформативних частот вузлів й їхніх елементів Частота Методи визначення частот f1 1 , де β1 - частота обертання робочого органа в об./хв 60 обертання робочого органу f1, Гц обертання сепаратора зовнішнього кільця f2, Гц обертання сепаратора внутрішнього кільця f3, Гц 1 5 cos D 0 , , D 3 4 f2 1 0 180 2 2 щодо де β2 - кут контакту тіл обертання з підшипником у градусах β3 - посадковий розмір зовнішнього кільця в мм β4 - посадковий розмір внутрішнього кільця в мм β5 - діаметр тіла кочення в мм щодо перекочування тіл кочення зовнішньому кільцю f4, Гц перекочування тіл кочення внутрішньому кільцю f5, Гц обертання тіл своєї осі f6, Гц кочення зубчастого зачеплення по по навколо 1 5 cos D0 , , D 3 4 f3 2 0 180 2 2 f4=f2·β6, де β6 - кількість тіл кочення F5=f3·β6 2 D0 5 cos2 1 5 D0 f , , D 3 4 f6 2 0 1 180 2 2 f7=f1·β7, де β7 - кількість зубів зубчатої муфти або редуктора обертання лопаткового апарата f8, f8=f1β8, де β8 - кількість лопаток Гц 5 10 15 20 Джерела інформації: 1. Балицкий Ф.Я. Виброакустическая диагностика зарождающихся дефектов / Ф.Я. Балицкий. М.А. Иванова, А.Г. Соколова. - М.: Наука, 1984 - 120 с. 2. Пат. 2110781 Российская Федерация, G01M 13/04. Способ прогнозирования технического состояния межвального подшипника качения двухвальной турбомашины / Кузменко М.Л.; Коряковцев П.С.; Грязен Г.П.; Макаров В.П.; Кириевский Ю.Е.; заявитель и патентообладатель акционерное общество "Авиадвигатель". - № 95103534/28; заявл. 14.03.1995; опубл. 10.05.1998. 3. Решетов Д.Н. Детали машин: Учебник для студентов машиностроительных и механических специальностей вузов / Д.Н. Решетов. - М.: Машиностроение, 1989. - 496 с. 4. Федоров Е.Е. Методики интеллектуальной диагностики / Е.Е. Федоров. - Донецк: Ноулидж, 2010.-303 с. 5. Барков А.В. Мониторинг и диагностика роторных машин по вибрации / А.В. Барков, Н.А. Баркова, А.Ю. Азовцев. - СПб.: Изд. центр СПбГМТУ, 2000. - 169 с. 6. Методические указания по проведению экспертных обследований вентиляторных установок главного проветривания (РД 03-427-01). - М.: Государственное унитарное предприятие "Научно-технический центр по безопасности в промышленности Госгортехнадзора России", 2002. - Серия 03. - Выпуск 11. - 104 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 Спосіб інтелектуальної діагностики виробничих об'єктів, заснований на аналізі акустичних або вібраційних сигналів методами цифрової обробки сигналу, у процесі якого, використовують нейронну мережу, нечітку логіку, генетичний алгоритм, експертну систему, розпізнавання акустичних і вібраційних образів, який відрізняється тим, що на дослідних стендах у процесі виготовлення й налагодження формують акустичний або вібраційний паспорт об'єкта, для чого: для кожного вузла й об'єкта вимірюють акустичні або вібраційні сигнали, які характеризують 5 UA 67741 U 5 10 його технічний номінальний стан; після чого перетворюють їх до векторів ознак за допомогою дискретного Фур'є- або вейвлет-перетворення; і на основі отриманих векторів ознак формують еталони, які використовують як усереднену характеристику його технічного номінального стану; потім адаптують структуру нечіткої нейромережі, за допомогою якої розпізнають стан об'єкта; після чого вибирають показники якості, за допомогою яких оцінюють точність, швидкодію й надійність; далі обчислюють за допомогою генетичного алгоритму параметри нейромережі й уточнюють значення еталонів з урахуванням заданих показників якості; потім задають правила бази знань експертної системи, за допомогою яких визначають номінальний стан вузлів й об'єкта в цілому й формують їх паспорт; а на стадії експлуатації вимірюють і перетворюють акустичний або вібраційний сигнал до вектора ознак; який зіставляють із паспортними даними вузлів й об'єктів за допомогою нейромережі; після чого на основі застосування правил експертної системи за результатами розпізнавання приймають рішення, відповідно до якого виробляють керуючий вплив. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for intellectual diagnostics of production objects
Автори англійськоюFedorov Yevhen Yevhenovych, Chychykalo Nina Ivanivna, Kharchenko Volodymyr Petrovych, Kuptsova Kateryna Yuriivna, Larin Vitalii Yuriiovych
Назва патенту російськоюСпособ интеллектуальной диагностики производственных объектов
Автори російськоюФедоров Евгений Евгениевич, Чичикало Нина Ивановна, Харченко Владимир Петрович, Купцова Екатерина Юрьевна, Ларин Виталий Юрьевич
МПК / Мітки
МПК: G01N 22/00
Мітки: об'єктів, інтелектуальної, діагностики, спосіб, виробничих
Код посилання
<a href="https://ua.patents.su/8-67741-sposib-intelektualno-diagnostiki-virobnichikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб інтелектуальної діагностики виробничих об’єктів</a>
Пристрій контролю функціонування системи електроживлення електронного пристрою за методом інтелектуальної технології ідентифікації
Номер патенту: 56332
Опубліковано: 10.01.2011
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Левчук Олександр Миколайович
МПК: G01S 13/00
Мітки: контролю, електронного, пристрою, ідентифікації, функціонування, технології, електроживлення, системі, методом, інтелектуальної, пристрій
Формула / Реферат:
Пристрій контролю функціонування системи електроживлення електронного пристрою за методом інтелектуальної технології ідентифікації, що включає пакетний перемикач, вольтметр, який відрізняється тим, що пристрій додатково містить аналого-цифровий перетворювач напруги 6,3 В, аналого-цифровий перетворювач напруги +125 В, аналого-цифровий перетворювач напруги -125 В, аналого-цифровий перетворювач напруги +250 В, аналого-цифровий перетворювач...
Спосіб керування поливом виробничих насаджень винограду сорту мускат білий
Номер патенту: 17278
Опубліковано: 15.09.2006
Автори: Нілов Микола Геннадійович, Іванов Юрій Олександрович, Березовська Світлана Петрівна, Мазуренко Наталія Анатоліївна
МПК: A01G 25/00
Мітки: винограду, мускат, поливом, білий, насаджень, керування, виробничих, спосіб, сорту
Формула / Реферат:
Спосіб керування поливом виробничих насаджень винограду сорту Мускат білий, що передбачає регулювання водним режимом рослини із застосуванням стресу й проведення моніторингу для визначення водного стану рослини, який відрізняється тим, що водний стан рослини визначають моніторингом досвітніх значень водних потенціалів листів винограду протягом усього періоду його вегетації, а водний режим рослини на відповідних стадіях вегетації рослини...
Спосіб очищення виробничих стічних вод
Номер патенту: 49141
Опубліковано: 26.04.2010
Автори: Баранов Георгій Анатолійович, Рубцов Геннадій Сергійович, Гавриш Михайло Володимирович, Смирнов Сергій Борисович, Васильєв Вадим Сергійович
Мітки: спосіб, вод, стічних, очищення, виробничих
Формула / Реферат:
Спосіб очищення виробничих стічних вод, який використовує триступеневу технологічну схему з аеробним окисненням на другому ступені і глибоким доочищенням на третьому ступені, який відрізняється тим, що на першому ступені здійснюють фізико-хімічне очищення стічних вод у кавітаційних генераторах, на другому ступені застосовують біофільтри з площинним поліетиленовим завантаженням, на яких заздалегідь іммобілізують асоціацію штамів активних...
Спосіб визначення заходів профілактики шкідливого впливу виробничих чинників
Номер патенту: 42960
Опубліковано: 15.11.2001
Автор: Завгородній Ігор Володимирович
МПК: G01N 33/483
Мітки: виробничих, спосіб, профілактики, впливу, чинників, визначення, заходів, шкідливого
Формула / Реферат:
Спосіб визначення заходів профілактики шкідливого впливу виробничих чинників шляхом визначення для конкретного виробничого процесу якісних параметрів умов праці з наступною їх кількісною оцінкою, який відрізняється тим, що визначають температуру повітря, швидкість руху повітря, відносну вологість повітря, рівень звуку, еквівалентний рівень звуку, еквівалентний корегувальний рівень вібрації, показники важкості та напруженості праці, комплекс...
Спосіб прогнозування термінів розвитку радикулопатії під впливом шкідливих виробничих чинників
Номер патенту: 71424
Опубліковано: 15.11.2004
Автори: Науменко Борис Сергійович, Дворніченко Григорій Борисович, Ященко Андрій Борисович, Базовкін Павло Сергійович
МПК: A61B 10/00
Мітки: спосіб, термінів, радикулопатії, шкідливих, впливом, виробничих, розвитку, чинників, прогнозування
Формула / Реферат:
Спосіб прогнозування термінів розвитку радикулопатії під впливом шкідливих виробничих чинників шляхом визначення стану соматичного здоров'я, вираженого через фізіологічні показники організму, та рівня шкідливих факторів виробничого середовища, який відрізняється тим, що оцінюють сумарну больову чутливість на пальцях кисті, тилу кисті, передпліччі, пальцях стопи, тилу стопи, гомілці, силу кисті та силову витривалість м'язів тулуба,...
Попередній патент: Водно-дисперсна фарба
Наступний патент: Установка “astanin-dd” для дослідження ударної міцності із детектором залишкових деформацій
Випадковий патент: Тепловий насос для зрідження кріогенних газів