Система уловлювання та захисту від скочування під уклон рухомого состава канатної відкатки
Номер патенту: 69120
Опубліковано: 25.04.2012
Автори: Амірахов Арастун Аліяддінович, Хаджиков Микола Ростиславович, Степанов Євгеній Іванович, Романенко Віктор Павлович

Формула / Реферат
Система уловлювання і захисту від скочування під уклон рухомого состава канатної відкатки, що містить рейковий шлях похилої виробки, лебідку підйомної установки, состав вагонеток з гальмівним візком, на ходовій платформі якого встановлені гальмівний механізм з причіпним пристроєм і утримуюча лебідка, причепленим до тягового каната лебідки підйомної установки через причіпний пристрій гальмівного механізму і зчепленим канатом утримуючої лебідки з ходовою платформою останньої вагонетки состава, уловлюючі бар'єри типу "гільйотина" і апаратуру автоматизації, яка відрізняється тим, що система забезпечена запобіжними канатами, закріпленими на кінцях рейкового шляху виробки і укладеними на верхню будову рейкового шляху, з надітими на ці канати порожнистими затисками, закріпленими до нижніх частин ходових платформ гальмівного візка і останньої вагонетки состава, причому частина порожнини цих затисків має форму конічної поверхні і забезпечена конічними сегментами, а частина порожнини - має форму циліндрової поверхні з великим і меншим діаметром і забезпечена пружним елементом, встановленим в порожнині з великим діаметром і порожнистим гвинтом, встановленим в порожнині з меншим діаметром з можливістю радіального і аксіального переміщення, при цьому конічні сегменти притиснуті пружним елементом і циліндровою частиною до поверхні запобіжного каната, а конічною частиною і меншою підставою - до конічної поверхні порожнини і до торця порожнистого гвинта, відповідно.
Текст
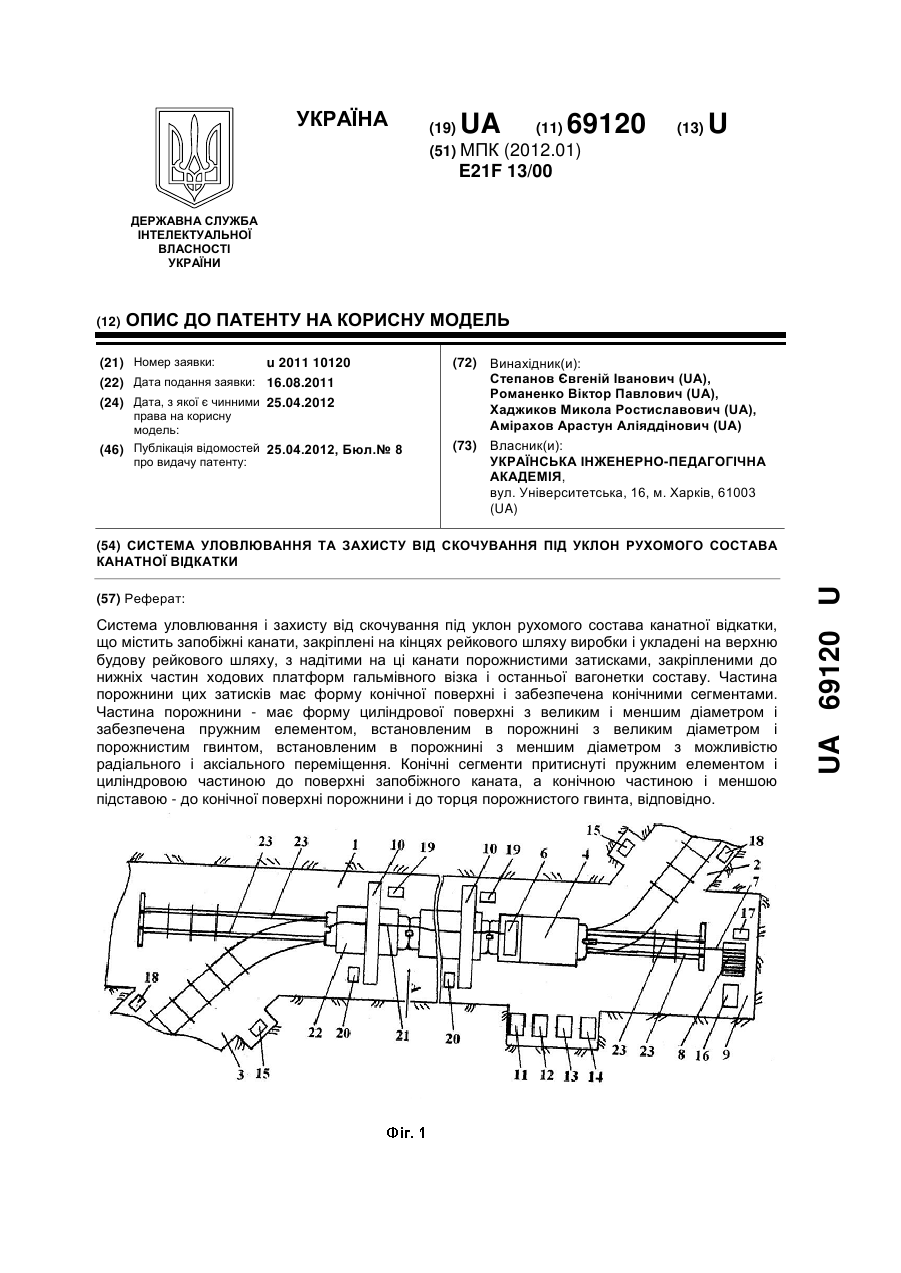
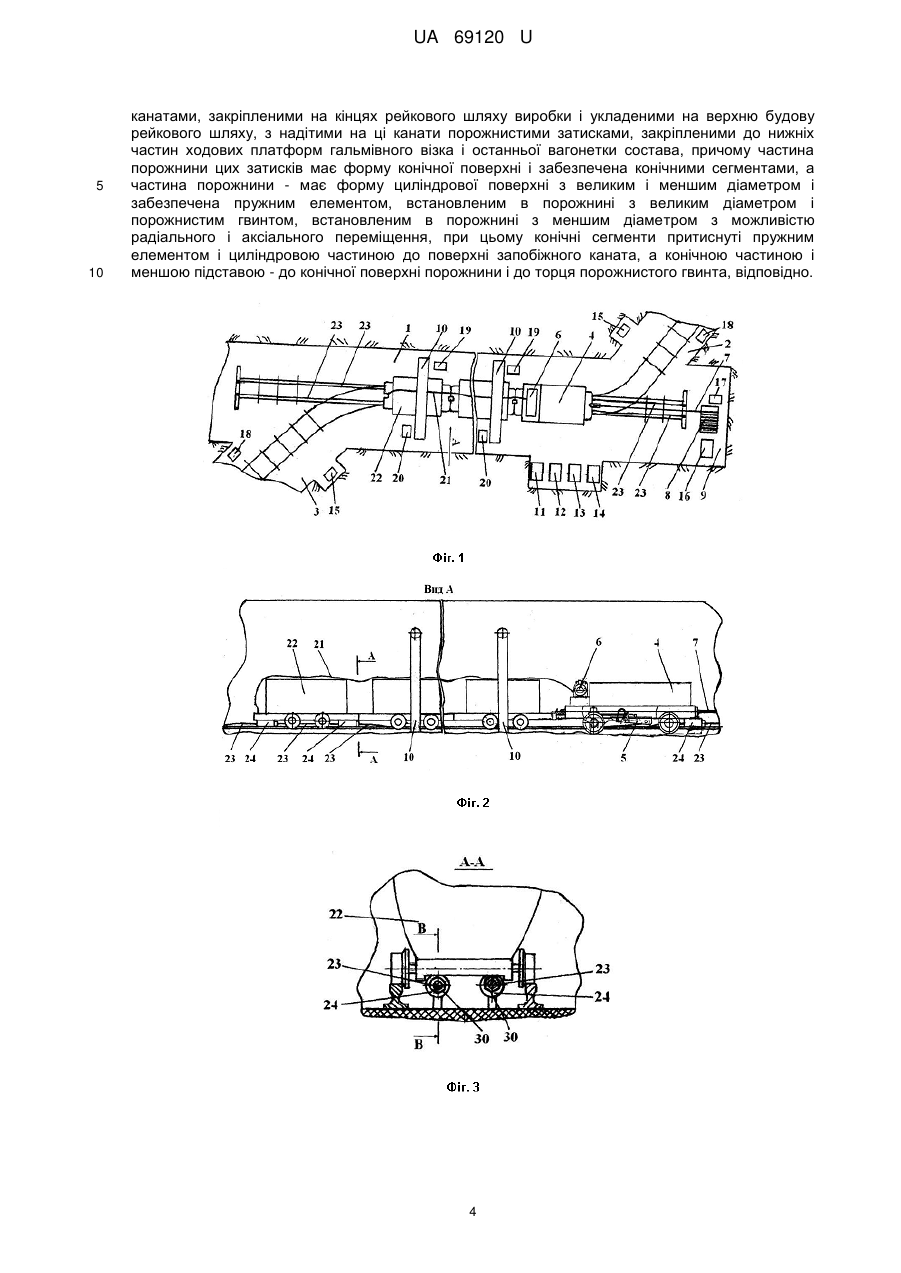
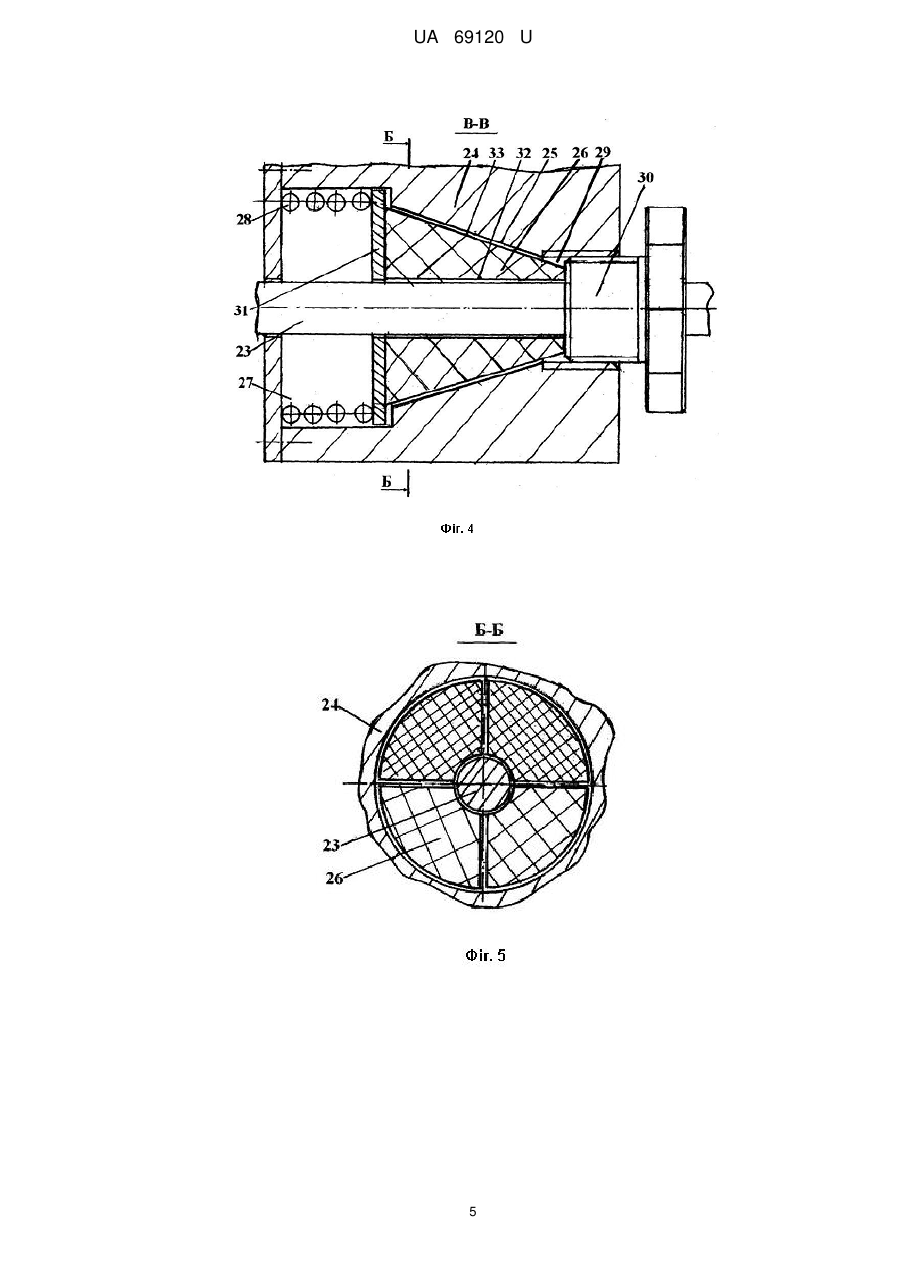
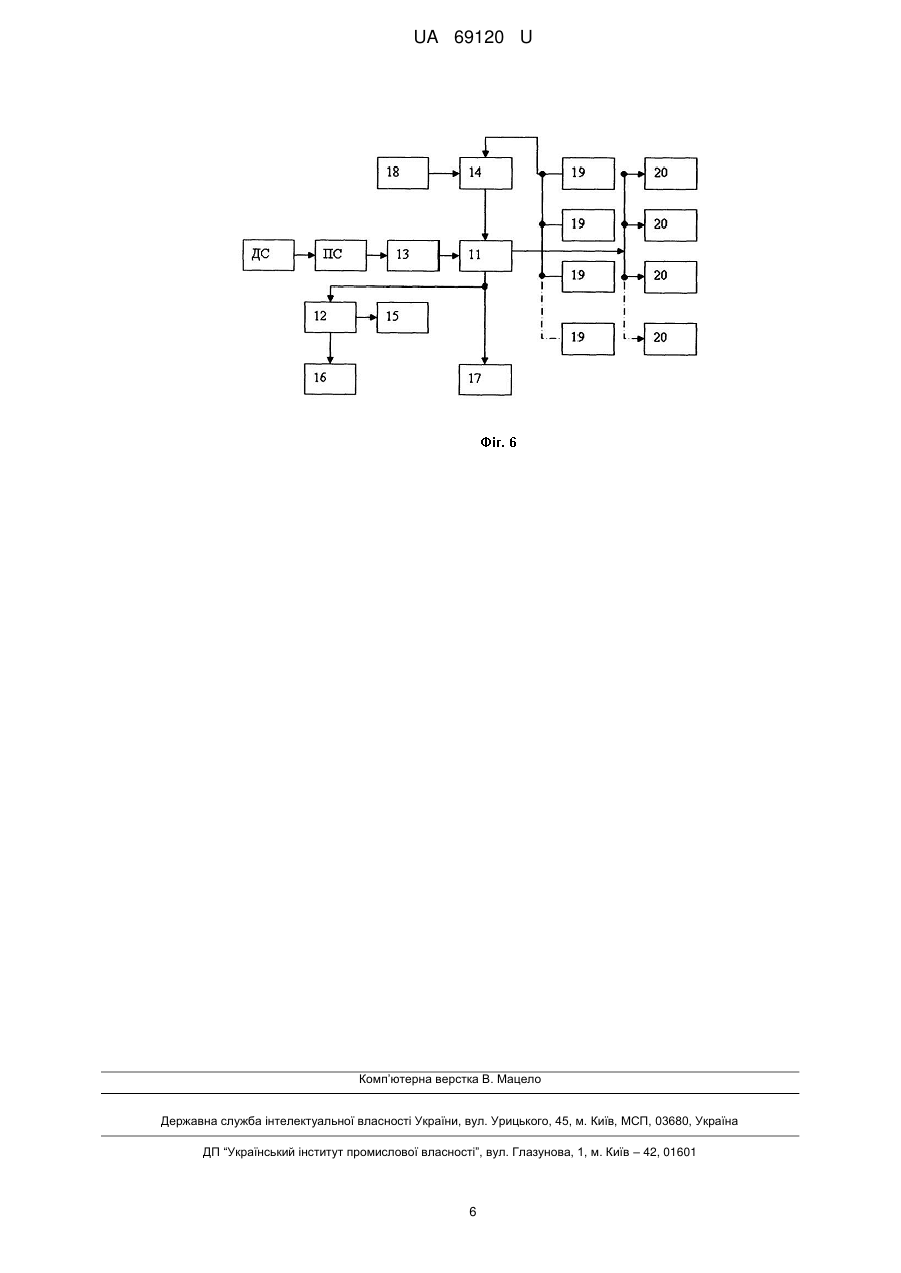
Реферат: Система уловлювання і захисту від скочування під уклон рухомого состава канатної відкатки, що містить запобіжні канати, закріплені на кінцях рейкового шляху виробки і укладені на верхню будову рейкового шляху, з надітими на ці канати порожнистими затисками, закріпленими до нижніх частин ходових платформ гальмівного візка і останньої вагонетки составу. Частина порожнини цих затисків має форму конічної поверхні і забезпечена конічними сегментами. Частина порожнини - має форму циліндрової поверхні з великим і меншим діаметром і забезпечена пружним елементом, встановленим в порожнині з великим діаметром і порожнистим гвинтом, встановленим в порожнині з меншим діаметром з можливістю радіального і аксіального переміщення. Конічні сегменти притиснуті пружним елементом і циліндровою частиною до поверхні запобіжного каната, а конічною частиною і меншою підставою - до конічної поверхні порожнини і до торця порожнистого гвинта, відповідно. UA 69120 U (54) СИСТЕМА УЛОВЛЮВАННЯ ТА ЗАХИСТУ ВІД СКОЧУВАННЯ ПІД УКЛОН РУХОМОГО СОСТАВА КАНАТНОЇ ВІДКАТКИ UA 69120 U UA 69120 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до підземного видобутку вугілля, а саме до копальневого транспорту при транспортуванні корисної копалини канатною відкаткою в похилих виробках. Відомий перевантажувач за авторським посвідченням № 1005535, що містить ходову частину з рамою, вантажонесучий орган з бічними сторонами, днищем і віброзбудником направленої дії і пружні елементи, на яких встановлений вантажонесучий орган, закріплені на рамі стійки, з якими пов'язаний вантажонесучий орган, шарнірно пов'язані з вантажонесучим органом шибери, що мають привід їх повороту, додатковий віброзбудник, встановлений на вантажонесучому органі і механізм нахилу днища вантажонесучого органу, пов'язаний з останнім і рамою [1]. Недоліком вказаного технічного рішення є те, що ходова платформа перевантажувача обладнана тільки зчіпним пристроєм для зчеплення з рухомим составом, і у разі обриву його при русі в похилій виробці можливе скочування під уклон состава або частини состава, в який може входити цей перевантажувач, з великою швидкістю скочування, а враховуючи технологічну значущість таких транспортних засобів, необхідно мати в обов'язковому порядку на їх ходових платформах гальмівні і утримуючі системи. Найбільш близькою до корисної моделі по технічній суті і результату, що досягається, є система уловлювання і захисту від скочування під уклон рухомого состава канатної відкатки згідно з статтею в журналі «Уголь Украины».-2009.-№3.-С. 18-20, що містить рейковий шлях похилої виробки, лебідку підйомної установки, рухомий состав вагонеток з гальмівним візком, на ходовій платформі якого встановлені гальмівний механізм з причіпним пристроєм і утримуюча лебідка, причепленим до тягового каната лебідки підйомної установки через причіпний пристрій гальмівного механізму і зчепленим канатом утримуючої лебідки з ходовою платформою останньої вагонетки состава, уловлюючі бар'єри типу «гільйотина» і апаратуру автоматизації [2]. Недоліком даної системи є гальмування рухомого состава вагонеток при обриві тягового каната або причіпного пристрою колісними парами гальмівного візка, унаслідок чого із-за низького коефіцієнта тертя між колесом і рейкою вагонетки состава можуть «пролітати» значні відстані, перш ніж будуть уловлені уловлюючими бар'єрами (тобто перш, ніж спрацюють елементи апаратури автоматизації), а також гальмування частини состава при обриві зчіпного пристрою між вагонетками состава канатом утримуючої лебідки, унаслідок чого частина состава, що відчепилась, може набрати велику швидкість скочування під уклон і ланцюг датчик контролю числа вагонеток в составі - виконавчий елемент опускання бар'єру не спрацює вчасно, і аварійна частина состава не буде уловлена найближчим бар'єром, а «проскочить» до іншого нижче встановленого бар'єру, і навіть, якщо і буде уловлена цим бар'єром, то масштаб аварії виявиться значним (схід з рейок состава, перекидання вагонеток, руйнування кріплення і уловлюючого бар'єру, травмування людей), що зумовлює тенденцію до збільшення кількості встановлюваних уловлюючих бар'єрів в похилій виробці для підтримки необхідного рівня безпеки при експлуатації канатної відкатки у вугільній шахті, і окрім цього, із-за специфічних умов експлуатації в підземних виробках апаратури автоматизації можливий вихід з ладу її елементів (блоків, пристроїв, технічних засобів управління і так далі), а також знеструмлення частини або всього комплекту апаратури автоматизації, то перераховані негативні чинники можуть також виявитися в масштабних аваріях. В основу корисної моделі поставлено задачу виключити масштабні аварійні ситуації в похилих виробках при транспортуванні корисної копалини канатною відкаткою при обриві тягового каната, причіпного пристрою або зчіпного пристрою в самому составі за рахунок різкого гальмування і надійного утримання состава або частини состава при скочуванні під уклон без набору швидкості скочування в системі уловлювання і захисту від скочування під уклон рухомого состава канатної відкатки, згідно з статтею в журналі «Уголь Украины». - 2009.-№3.-С. 18-20. Поставлена задача вирішується тим, що відома система уловлювання і захисту від скочування під уклон рухомого состава канатної відкатки, що містить рейковий шлях похилої виробки, лебідку підйомної установки, состав вагонеток з гальмівним візком, на ходовій платформі якого встановлені гальмівний механізм з причіпним пристроєм і утримуюча лебідка, причепленим до тягового каната лебідки підйомної установки через причіпний пристрій гальмівного механізму і зчепленим канатом утримуючої лебідки з ходовою платформою останньої вагонетки состава, уловлюючі бар'єри типу «гільйотина» і апаратуру автоматизації, забезпечена запобіжними канатами, закріпленими на кінцях рейкового шляху виробки і укладеними на верхню будову рейкового шляху, з надітими на ці канати порожнистими затисками, закріпленими до нижніх частин ходових платформ гальмівного візка і останньої вагонетки состава, причому частина порожнини цих затисків має форму конічної поверхні і 1 UA 69120 U 5 10 15 20 25 30 35 40 45 50 55 забезпечена конічними сегментами, а частина порожнини має форму циліндрової поверхні з великим і меншим діаметром і забезпечена пружним елементом, встановленим в порожнині з великим діаметром і порожнистим гвинтом, встановленим в порожнині з меншим діаметром з можливістю радіального і аксіального переміщення, при цьому конічні сегменти притиснуті пружним елементом і циліндровою частиною до поверхні запобіжного каната, конічною частиною і меншою підставою до конічної поверхні і торця полого гвинта, відповідно, що дозволить підвищити безпеку канатної відкатки у вугільних шахтах. На фіг. 1 представлена технологічна схема канатної відкатки з системою уловлювання і захисту від скочування під уклон рухомого состава; на фіг. 3 - перетин А-А на фіг. 2; на фіг. 4 перетин В-В на фіг. 3; на фіг. 5 - перетин Б-Б на фіг. 4; на фіг. 6 - блок-схема функціонування апаратури автоматизації при уловлюванні состава або частини состава в похилій виробці. Система уловлювання і захисту від скочування під уклон рухомого состава складається з рейкового шляху похилої виробки 1 з верхнім приймально-відправним майданчиком 2 (ПВМ) і нижнім ПВМ 3, підйомної установки, рухомого состава вагонеток з гальмівним візком 4, на ходову платформу якого встановлені гальмівний механізм 5 з причіпним пристроєм (на кресленні не показано) і утримуюча лебідка 6, причепленим до тягового каната 7 лебідки 8 підйомної установки, встановленої в камері 9, через причіпний пристрій гальмівного механізму 5, уловлюючих бар'єрів 10 типу «гільйотина», встановлених по всій довжині похилої виробки 1 і апаратури автоматизації, в комплект якої входять: основні блоки - виконавчий блок 11, блок 12 сигналізацій та індикації, блок 13 приймача інформації про швидкість рухомого состава, блок 14 контролю числа вагонеток (задатчик), встановлені в ніші похилої виробки; допоміжні блоки блоки 15 включення світлової і звукової сигналізації, блок 16 відображень інформації, блок 17 відключення апаратури управління лебідкою 8 підйомної установки і технічні засоби управління - датчик швидкості ДС і передавач інформації про швидкість состава ПС, встановлені на гальмівному візку (на кресленні не показано), пристрої 18 зчитувань числа вагонеток в составі, датчики 19 контролю числа вагонеток в составі, виконавчі елементи 20 опускань уловлюючого бар'єру. Канатом 21 утримуючої лебідки 6 гальмівний візок зчеплений також з ходовою платформою останньої вагонетки 22 состава, що виконує функції як і гальмівний візок, «баластної». На верхню будову рейкового шляху похилої виробки укладені запобіжні канати 23, закріплені на кінцях рейкового шляху (на кресленні не вказані) з надітими на них порожнистими затисками 24. Затиски закріплені до нижніх частин ходових платформ гальмівного візка і баластної вагонетки 22, наприклад, зваркою, болтовим з'єднанням, хомутами. Частина порожнини затисків 24 має форму конічної поверхні 25 і забезпечена конічними сегментами 26, а частина порожнини затисків має форму циліндрової поверхні з великим і меншим діаметром. Порожнина 27 з циліндровою поверхнею більшого діаметра забезпечена пружним елементом 28, а порожнина 29 з циліндровою поверхнею меншого діаметра забезпечена порожнистим гвинтом 30, встановленим з можливістю радіального і аксіального переміщення в цій порожнині. У затисках конічні сегменти 26 притиснуті пружним елементом 28 через шайбу 31 до поверхні запобіжного каната 23 і циліндровою частиною 32 своєї поверхні, а до конічної поверхні 25 затиску і до торця полого гвинта 30 - конічною частиною 33 своєї поверхні і меншою підставою, відповідно. Конічні сегменти 26 можуть бути виконані з дерева, спеціальних пластмас, м'яких металів і так далі. Стрілочні переклади верхньої ПВМ 2 і нижньої ПВМ 3 на зовнішній нитці перекладної кривої мають стики (на кресленні не показано), в які укладаються запобіжні канати 23 гальмівним візком і «баластною» вагонеткою 22 при формуванні рухомого состава для руху по похилій виробці вгору або вниз. У системі як «бар'єр» в уловлюючих бар'єрах 10 використовується металева або інша, така, що відповідає вимогам міцності сітка (на кресленні не показано). Функціональний взаємозв'язок в комплекті апаратури автоматизації показаний в блок-схемі на фіг.6. Алгоритм функціонування схеми автоматизації і системи в цілому наступний. При русі складу з вантажем по похилій виробці вгору інформація про його швидкість від встановленого на гальмівному візку датчика швидкості ДС і передавача ПС передається в блок 13, звідки надходить в блок 11. У разі обриву тягового каната 7 або причіпного пристрою спрацьовує гальмівний механізм 5 гальмівного візка і починається гальмування состава. Швидкість состава при цьому перевищує допустиму і блок 11 дає команду на виконавчий елемент 20 для опускання нижче встановленого уловлюючого бар'єру 10. Одночасно блок 11 подає команду в блок 12, який формує сигнали на 2 UA 69120 U 5 10 15 20 25 30 35 40 45 50 включення блоків 15 і 16, а також подає сигнал в блок 17. Лебідка 8 підйомної установки зупиняється, а состав уловлюється найближчим уловлюючим бар'єром 10. У разі обриву зчіпного пристрою (на кресленні не показано) в рухомому составі алгоритм наступний. При підході до нижньої ПВМ навантаженого состава (перед формуванням состава в похилій виробці) пристрій 18 прочитує число вагонеток в составі, яке передається в блок 14 (задатчик). У похилій виробці в місцях установки уловлюючих бар'єрів 10 встановлені датчики S9. При обриві зчіпного пристрою частина состава, що відчепилася, опускається 6 нижче за основний состав на величину напуску каната 21 утримуючої лебідки 6 гальмівного візка. Найближчий датчик 19 передає в блок 14 інформацію про проходження частини состава. Блок 14 фіксує невідповідність отриманої інформації з раніше отриманою від пристрою 18 і подає сигнал в блок 11 на зупинку лебідки 8 (блок 17), опускання нижче встановленого уловлюючого бар'єру 10 (виконавчий елемент 20) включення світлової і звукової сигналізації (блоки 15 і 16). У разі використання в системі запобіжних канатів 23 з надітими на них порожнистими затисками 24, закріпленими до нижніх частин платформ гальмівного візка 4 і баластної вагонетки 22, послідовність функціонування системи не міняється. При русі завантаженого состава вгору по похилій виробці порожнистий гвинт 30 затисків 24 встановлюється так, що його торець не стикається з нижньою підставою конічних сегментів 26. Сегменти ковзають по поверхні запобіжного каната 23, стискаючи пружний елемент 28, і в затиску не відбувається «розклинювання» цими сегментами поверхні каната. При обриві тягового каната 7, причіпного пристрою або зчіпних пристроїв в составі відбувається скочування состава і розклинювання (заклинювання) конічними сегментами 26 поверхні запобіжного каната 23 в затисках 24 (тобто циліндровою частиною 32 сегменти затискають поверхню запобіжного каната 23). Відбувається різке гальмування всього состава, у разі обриву тягового каната 7 або причіпного пристрою, затисками 24 гальмівного візка і баластної вагонетки 22 або частини состава, у разі обриву зчіпного пристрою в составі, затисками 24 баластної вагонетки 22 і утримання состава або частини состава на запобіжних канатах 23. При русі ненавантаженого состава вниз по похилій виробці порожнистий гвинт 30 затисків 24 встановлюється так, щоб його торець стикався з нижніми підставами конічних сегментів 26, стискаючи в порожнині 27 пружний елемент 28. В цьомувипадку заклинювання поверхні запобіжного каната 23 конічними сегментами 26 не відбудеться, оскільки сегменти 26 не переміщаються на розклинювання (заклинювання). Таким чином, забезпечивши систему уловлювання і захисту від скочування під уклон рухомого состава запобіжними канатами з надітими на них порожнистими затисками, закріпленими до нижніх частин ходових платформ, наприклад першої і останньої відкатної посудини рухомого состава, що виконують функції «баластних», дозволить підвищити надійність роботи канатної відкатки в похилих виробках за рахунок утримання в затисках всього состава або частини состава на запобіжних канатах при скочуванні його під уклон у разі обриву тягового каната, причіпного пристрою або зчіпного пристрою, а виконання порожнини затисків різної форми поверхонь і розмірності з розміщенням в них конічних сегментів, пружного елемента і порожнистого гвинта, дозволить різко здійснювати затиск поверхні запобіжного каната (різке гальмування), виключивши тим самим набирання швидкості скочування «аварійного» состава при русі состава з вантажем і закріплювати ці затиски до ходових платформ будь-якої відкатної посудини, здійснюючи при необхідності швидку заміну конічних сегментів як гальмівних елементів, що в сукупності з вищевикладеним підвищує безпеку канатної відкатки на вугільних шахтах. Джерела інформації: 1. Авторское свидетельство СССР №1005535, Ε21F13/00, 1987. 2. Деревянский В.Ю., Бирюков В.В. Автоматизированный комплекс улавливания вагонеток «АКУЛА» // Уголь Украины. - 2009. -№3. - С.18-20. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Система уловлювання і захисту від скочування під уклон рухомого состава канатної відкатки, що містить рейковий шлях похилої виробки, лебідку підйомної установки, состав вагонеток з гальмівним візком, на ходовій платформі якого встановлені гальмівний механізм з причіпним пристроєм і утримуюча лебідка, причепленим до тягового каната лебідки підйомної установки через причіпний пристрій гальмівного механізму і зчепленим канатом утримуючої лебідки з ходовою платформою останньої вагонетки состава, уловлюючі бар'єри типу "гільйотина" і апаратуру автоматизації, яка відрізняється тим, що система забезпечена запобіжними 3 UA 69120 U 5 10 канатами, закріпленими на кінцях рейкового шляху виробки і укладеними на верхню будову рейкового шляху, з надітими на ці канати порожнистими затисками, закріпленими до нижніх частин ходових платформ гальмівного візка і останньої вагонетки состава, причому частина порожнини цих затисків має форму конічної поверхні і забезпечена конічними сегментами, а частина порожнини - має форму циліндрової поверхні з великим і меншим діаметром і забезпечена пружним елементом, встановленим в порожнині з великим діаметром і порожнистим гвинтом, встановленим в порожнині з меншим діаметром з можливістю радіального і аксіального переміщення, при цьому конічні сегменти притиснуті пружним елементом і циліндровою частиною до поверхні запобіжного каната, а конічною частиною і меншою підставою - до конічної поверхні порожнини і до торця порожнистого гвинта, відповідно. 4 UA 69120 U 5 UA 69120 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for trapping and protection against roll down at slope for moving stock of cable haulage
Автори англійськоюStepanov Yevhenii Ivanovych, Romanenko Viktor Pavlovych, Khadzhykov Mykola Rostyslavovych, Amirakhov Arastun Aliiaddinovych
Назва патенту російськоюСистема улавливания и защиты от скатывания под уклон подвижного состава канатной откатки
Автори російськоюСтепанов Евгений Иванович, Романенко Виктор Павлович, Хаджиков Николай Ростиславович, Амирахов Арастун Алияддинович
МПК / Мітки
МПК: E21F 13/00
Мітки: система, відкатки, захисту, уловлювання, рухомого, скочування, уклон, состава, канатної
Код посилання
<a href="https://ua.patents.su/8-69120-sistema-ulovlyuvannya-ta-zakhistu-vid-skochuvannya-pid-uklon-rukhomogo-sostava-kanatno-vidkatki.html" target="_blank" rel="follow" title="База патентів України">Система уловлювання та захисту від скочування під уклон рухомого состава канатної відкатки</a>
Пристрій для захисту від надлишкового проковзування колісних пар рухомого складу при гальмуванні
Номер патенту: 82134
Опубліковано: 11.03.2008
Автори: Яцько Сергій Іванович, Яцько Роман Сергійович
МПК: B61C 15/00, B60L 3/10
Мітки: пар, проковзування, надлишкового, пристрій, колісних, складу, захисту, гальмуванні, рухомого
Формула / Реферат:
Пристрій для захисту від надлишкового проковзування колісних пар рухомого складу при гальмуванні, що містить блоки виділення максимальної та мінімальної частот обертання, виходи яких з'єднані з входами блока визначення різниці сигналів, вихід якого підключений до входу першого порогового елемента, ключ, два входи якого з'єднані з блоком задання максимальної гальмівної сили та блоком задання мінімальної гальмівної сили, а вихід ключа з'єднаний...
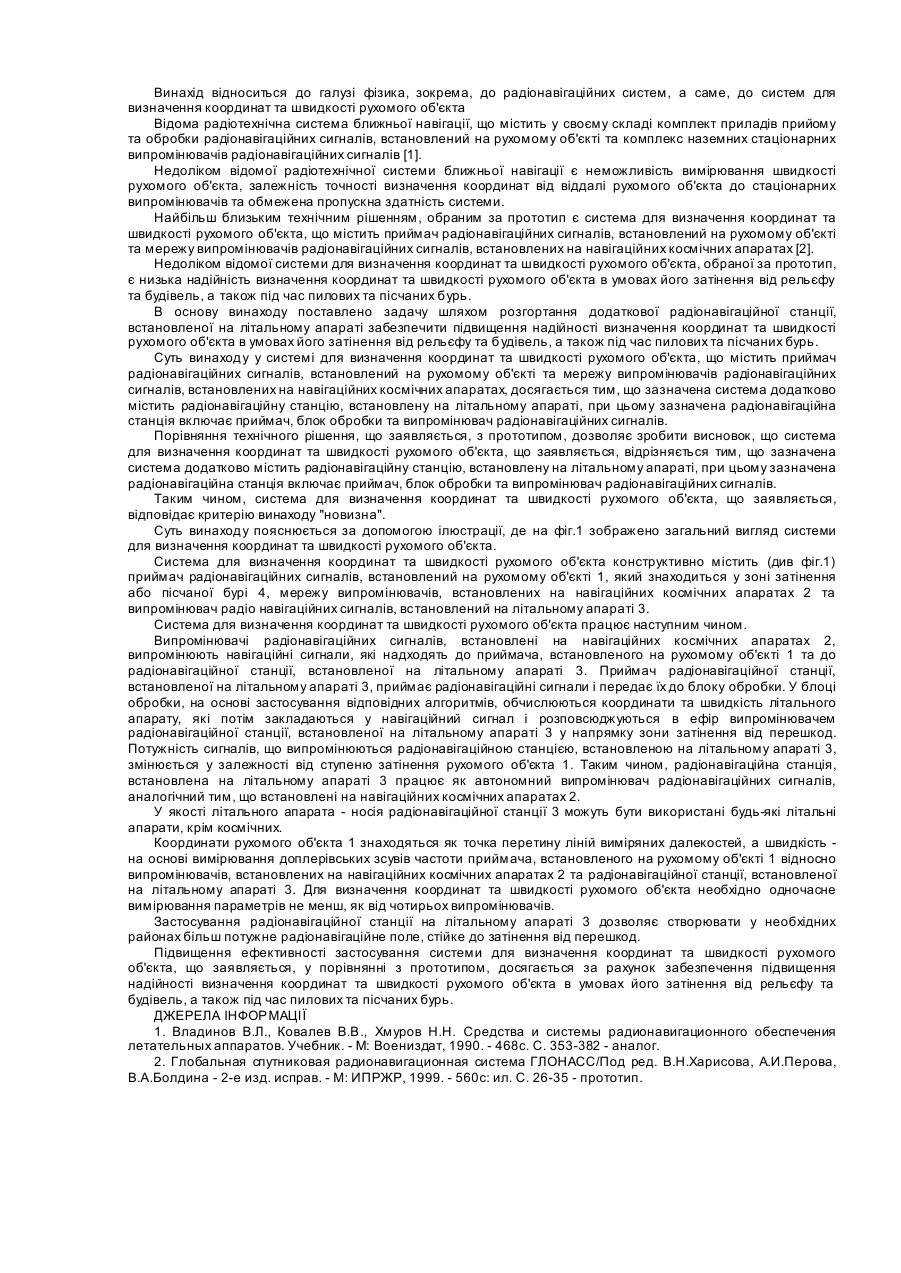
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Мосов Сергій Петрович, Савченко Віталій Анатолійович, Кравченко Юрій Васильович, Машков Олег Альбертович
МПК: G01S 5/02
Мітки: рухомого, визначення, об'єкта, швидкості, координат, система
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Спосіб визначення моменту скочування шлаку
Номер патенту: 61575
Опубліковано: 25.07.2011
Автори: Жук Сергій Васильович, Богушевський Володимир Святославович
МПК: C21C 5/46
Мітки: скочування, визначення, спосіб, шлаку, моменту
Формула / Реферат:
Спосіб визначення моменту скочування шлаку, що включає вимірювання швидкості зневуглецювання, який відрізняється тим, що додатково контролюють акустичну характеристику продувки і час запізнення температурного сигналу, що сприймається водою на охолодження фурми, і за результатами вимірювання визначають комплексний параметр стану шлаку, який розраховують за формулоюМ=a1DVc+a2DА+a3Dt3,де a1, a2, a3 - коефіцієнти впливу окремих...
Система дистанційного контролю рейкового рухомого складу під час руху
Номер патенту: 96483
Опубліковано: 10.11.2011
Автори: Візняк Руслан Іванович, Бондаренко В'ячеслав Володимирович, Скуріхін Дмитро Ігорович
Мітки: контролю, руху, складу, дистанційного, рухомого, рейкового, система
Формула / Реферат:
Система дистанційного контролю рейкового рухомого складу під час руху, яка включає пульт керування вагона, АРМ начальника поїзда або машиніста, пристрій бездротового зв'язку з постом віддаленого контролю, яка відрізняється тим, що на вагоні додатково встановлений пристрій акустичного контролю ходових частин та пiдвагонного обладнання, до якого підключені сенсори, які закріплені на кузові вагона знизу, блок живлення від електричної мережі...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Гуш Роман Миколайович, Кописов Олег Едуардович, Дергачов Костянтин Юрійович, Кулік Анатолій Степанович
МПК: G08G 1/0968
Мітки: місцезнаходженням, рухомого, система, керування, об'єкта
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Попередній патент: Дорн
Наступний патент: Схема преамбули для бездротового сигналу
Випадковий патент: Пероральна фармацевтична композиція у вигляді множинної дозованої форми з модифікованим вивільненням і спосіб її одержання