Спосіб випробувань об’єкту на вібронадійність в умовах трикоординатної поступальної вібрації
Номер патенту: 75080
Опубліковано: 26.11.2012
Автори: Шпачук Володимир Петрович, Нікітіна Ганна Олександрівна, Дудко Вадим Валентинович

Формула / Реферат
Спосіб випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації, при якому сигнал управління вібростендом формують з урахуванням попередньо виміряної матриці передатних функцій ![]() , що зв'язує трикоординатні поступальні вібрації платформи
, що зв'язує трикоординатні поступальні вібрації платформи ![]() і об'єкта випробувань
і об'єкта випробувань ![]() в контрольних точках
в контрольних точках ![]() і
і ![]() , а в контрольній точці
, а в контрольній точці ![]() платформи трикоординатного поступального вібростенда відтворюють вектор заданої вібрації
платформи трикоординатного поступального вібростенда відтворюють вектор заданої вібрації ![]() , який відрізняється тим, що вектор
, який відрізняється тим, що вектор ![]() заданої трикоординатної поступальної вібрації контрольної точки
заданої трикоординатної поступальної вібрації контрольної точки ![]() об'єкта визначають відповідно до співвідношення:
об'єкта визначають відповідно до співвідношення:
 , де
, де
![]() - обернена матриця передатних функцій,
- обернена матриця передатних функцій,
 ,
,
 ,
,
якщо виконуються умови ![]() ,
, ![]() і
і ![]() ,
,
 ,
,
якщо виконуються умови ![]() ,
, ![]() і
і ![]() ;
;
![]() ,
, ![]() ,
, ![]() - задані частота віброзбудження, велика та мала півосі еліпсу траєкторії вектору
- задані частота віброзбудження, велика та мала півосі еліпсу траєкторії вектору ![]() заданої вібрації контрольної точки
заданої вібрації контрольної точки ![]() об'єкта в нерухомій системі координат
об'єкта в нерухомій системі координат ![]() ,
, ![]() ,
, ![]() ,
, ![]() - задані літакові кути Ейлера, що визначають відносну орієнтацію осей систем координат
- задані літакові кути Ейлера, що визначають відносну орієнтацію осей систем координат ![]() і при нерухомому об'єкті,
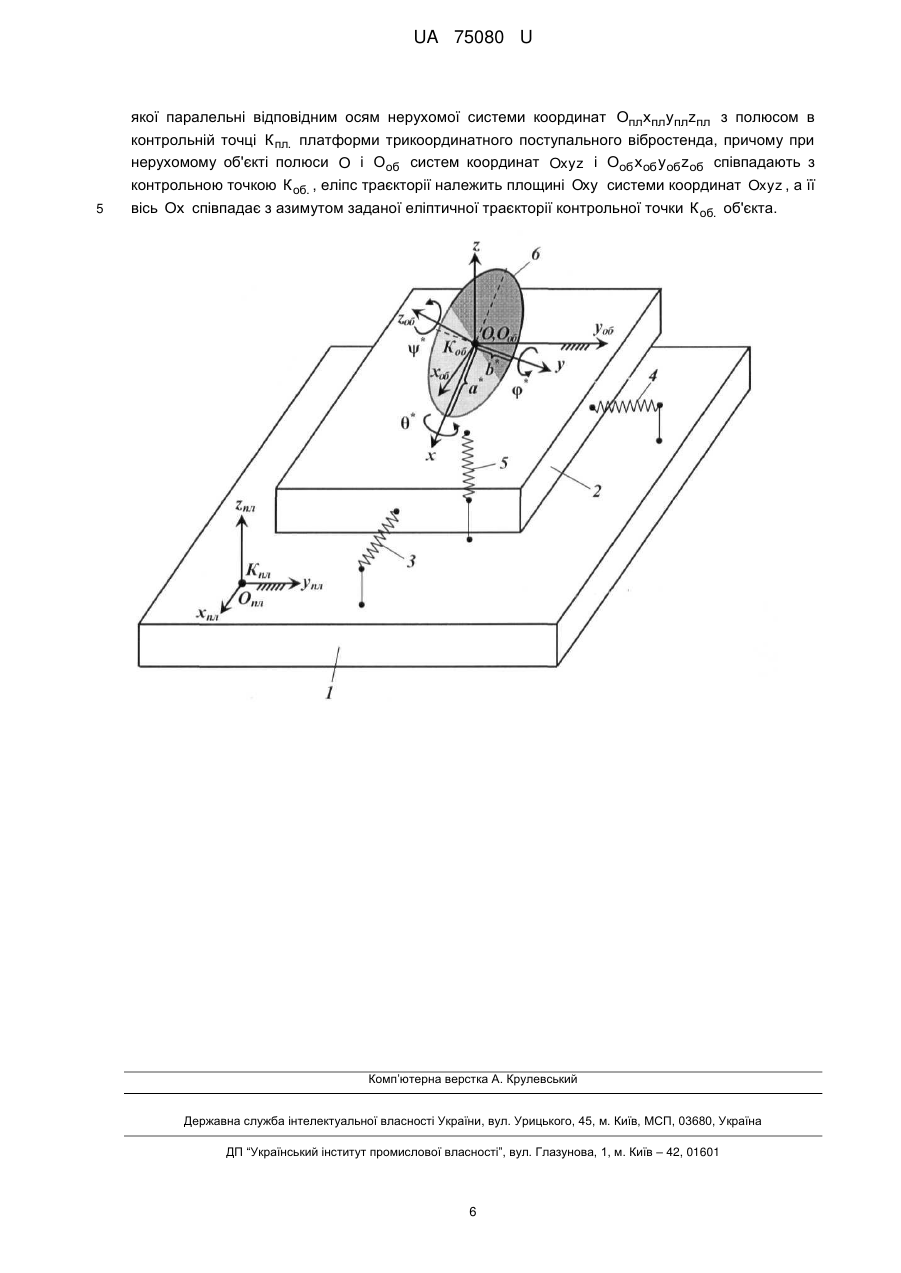
і при нерухомому об'єкті, ![]() - нерухома система координат, осі якої паралельні відповідним осям нерухомої системи координат
- нерухома система координат, осі якої паралельні відповідним осям нерухомої системи координат ![]() з полюсом в контрольній точці
з полюсом в контрольній точці ![]() платформи трикоординатного поступального вібростенда, причому при нерухомому об'єкті полюси
платформи трикоординатного поступального вібростенда, причому при нерухомому об'єкті полюси ![]() і
і ![]() систем координат
систем координат ![]() і
і ![]() співпадають з контрольною точкою
співпадають з контрольною точкою ![]() , еліпс траєкторії належить площині
, еліпс траєкторії належить площині ![]() системи координат
системи координат ![]() , а її вісь
, а її вісь ![]() співпадає з азимутом заданої еліптичної траєкторії контрольної точки
співпадає з азимутом заданої еліптичної траєкторії контрольної точки ![]() об'єкта.
об'єкта.
Текст
УКРАЇНА (19) UA (11) 75080 (13) U (51) МПК (2012.01) G01M 7/00 ДЕРЖАВНА СЛУЖБА ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ УКРАЇНИ (12) ОПИС ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (21) Номер заявки: u 2012 03871 Дата подання заявки: 29.03.2012 (22) (24) Дата, з якої є чинними 26.11.2012 права на корисну модель: (46) Публікація відомостей 26.11.2012, Бюл.№ 22 про видачу патенту: (72) Винахідник(и): Шпачук Володимир Петрович (UA), Нікітіна Ганна Олександрівна (UA), Дудко Вадим Валентинович (UA) (73) Власник(и): ХАРКІВСЬКА НАЦІОНАЛЬНА АКАДЕМІЯ МІСЬКОГО ГОСПОДАРСТВА, вул. Революції, 12, м. Харків, 61002 (UA) (54) СПОСІБ ВИПРОБУВАНЬ ОБ'ЄКТУ НА ВІБРОНАДІЙНІСТЬ В УМОВАХ ТРИКООРДИНАТНОЇ ПОСТУПАЛЬНОЇ ВІБРАЦІЇ Спосіб випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації, при якому сигнал управління вібростендом формують з урахуванням попередньо виміряної матриці передатних функцій W p , що зв'язує трикоординатні поступальні вібрації платформи Qпл.к.т. і об'єкта випробувань Qоб.к.т. в контрольних точках К пл. і К об. , а в контрольній точці К пл. платформи трикоординатного поступального вібростенда відтворюють вектор заданої * * * вібрації Qпл.к.т. W 1p Qоб.к.т. . Вектор Qоб.к.т. заданої трикоординатної поступальної вібрації контрольної точки К об. об'єкту визначають відповідно до заданого співвідношення. UA 75080 U (57) Реферат: UA 75080 U UA 75080 U 5 10 15 20 Корисна модель належить до способів випробувань об'єктів на вібронадійність в умовах трикоординатного поступального вібронавантаження, коли в контрольній точці об'єкта випробувань відтворюється еліптична траєкторія заданої форми і орієнтації в нерухомому тривимірному евклідовому просторі. При цьому азимут траєкторії (напрямок великої осі) співпадає або з напрямком найменшої жорсткості підвіски об'єкта, або напрямком його найбільшої податливості, або напрямком його найбільшого інерційного механічного навантаження. Відомий спосіб вібровипробувань виробів, відповідно з яким змінюють кут між вектором вібрації, що діє на виріб, і координатними осями виробу шляхом обертання виробу (А.с. РФ № 1556302, МПК G01M7/00, бюл. № 6, 1996). При цьому виріб безперервно обертають, а параметри вібрації змінюють в процесі обертання при досягненні виробом заданих програмою випробувань положень. Недоліком відомого способу є обмежені функціональні можливості, тому що його реалізація не забезпечує випробування об'єкта в режимі, коли азимут траєкторії в контрольній точці об'єкта співпадає або з напрямком найменшої жорсткості підвіски об'єкта, або напрямком його найбільшої податливості, або напрямком його найбільшого інерційного механічного навантаження. Найбільш близьким до запропонованого способу є спосіб випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації, при котрому сигнал управління вібростендом формують з урахуванням попередньо виміряної матриці передатних функцій W p , що зв'язує трикоординатні поступальні вібрації платформи Qпл.к.т. і об'єкта випробувань Qоб.к.т. в контрольних точках К пл. і К об. , а в контрольній точці К пл. платформи трикоординатного поступального вібростенду відтворюють вектор заданої вібрації 25 30 35 40 45 * * Qпл.к.т. W 1p Qоб.к.т. (A.c. СССР № 1575673, МПК G01M7/00, бюл. № 5, 1987). Недоліком даного способу випробувань є обмежені функціональні можливості, тому що його реалізація не забезпечує випробування об'єкта в режимі відтворення в нерухомій системі координат Oxyz , полюс якої співпадає з контрольною точкою об'єкта, еліптичної траєкторії заданої форми і орієнтації, азимут якої співпадає або із заданим напрямком найменшої жорсткості об'єкта, або заданим напрямком його найбільшої податливості, або заданим напрямком його найбільшого інерційного механічного навантаження. В основу корисної моделі поставлено задачу вдосконалення способу випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації, у якому за рахунок відтворення в контрольній точці платформи вектора заданої трикоординатної поступальної вібрації, який визначається з урахуванням попередньо виміряної матриці передатних функцій, що зв'язує трикоординатні поступальні вібрації платформи і об'єкта випробувань, і заданих літакових кутів Ейлера, що визначають орієнтацію системи координат, вісь абсцис якої співпадає з азимутом заданої еліптичної траєкторії контрольної точки об'єкта, досягається можливість проведення випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації в режимі відтворення в нерухомій системі координат Oxyz , полюс якої співпадає з контрольною точкою об'єкта, еліптичної траєкторії заданої форми і орієнтації, азимут якої співпадає або із заданим напрямком найменшої жорсткості об'єкта, або заданим напрямком його найбільшої податливості, або заданим напрямком його найбільшого інерційного навантаження, і розширюються функціональні можливості способу випробування. Поставлена задача вирішується за рахунок того, що в способі випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації, при котрому сигнал управління вібростендом формують з урахуванням попередньо виміряної матриці передатних функцій W p , що зв'язує трикоординатні поступальні вібрації платформи вібростенда Qпл.к.т. і об'єкта випробувань Qоб.к.т. в контрольних точках К пл. і К об. , а в контрольній точці К пл. платформи трикоординатного поступального вібростенда відтворюють вектор заданої вібрації 50 * * * Qпл.к.т. W 1p Qоб.к.т. , згідно з корисною моделлю вектор Qоб.к.т. заданої трикоординатної поступальної вібрації контрольної точки К об. об'єкта визначають відповідно до співвідношення: А х sin * t x А y sin * t y , де А z sin * t z 1 W p - обернена матриця передатних функцій, * Qоб.к.т. 1 UA 75080 U * * * * * 2 * * * 2 cos cos sin sin sin a sin cos b A x 2 2 Ay sin * cos * cos * sin * sin * a * cos * cos * b * , 2 2 A z cos * sin * a * sin * b * sin * cos * b * arcsin 2 2 cos * cos * sin * sin * sin * a * sin * cos * b * x cos * cos * b * y arcsin 2 2 z sin * cos * cos * sin * sin * a * cos * cos * b * sin * b * arcsin 2 2 cos * sin * a * sin * b * , якщо виконуються умови sin * cos * b * 0 , cos * cos * b * 0 і sin * b * 0 , sin * cos * b * arccos 2 2 cos * cos * sin * sin * sin * a * sin * cos * b * x cos * cos * b * , y arccos 2 2 z sin * cos * cos * sin * sin * a * cos * cos * b * sin * b * arccos 2 2 cos * sin * a * sin * b * * * * * * * * якщо виконуються умови sin cos b 0 , cos cos b 0 і sin b * 0 . 5 * , a * , b * - задані частота віброзбудження, велика та мала півосі еліпса траєкторії вектора * Qоб.к.т. заданої вібрації контрольної точки К об. об'єкта в нерухомій системі координат Oxyz , 10 * , * , * - задані літакові кути Ейлера, що визначають відносну орієнтацію осей систем координат Oxyz і Ооб х об у об zоб при нерухомому об'єкті, Ооб х об у об zоб - нерухома система координат, осі якої паралельні відповідним осям нерухомої системи координат Оплхплуплzпл з полюсом в контрольній точці К пл. платформи трикоординатного поступального вібростенда, причому при нерухомому об'єкті полюси О і Ооб систем координат Oxyz і Ооб х об у об zоб співпадають з контрольною точкою К об. , еліпс траєкторії належить площині Оху системи 15 20 25 координат Oxyz , а її вісь Ох співпадає з азимутом заданої еліптичної траєкторії контрольної точки К об. об'єкта. Суть способу ілюструється за допомогою креслення. На кресленні представлено: 1 - платформа трикоординатного поступального вібростенда; 2 - об'єкт випробувань; 3, 4, 5 - пружні елементи, що складають блок пружної підвіски об'єкта 2; 6 еліпс траєкторії контрольної точки К об. об'єкта випробувань з великою a * і малою b * півосями; К пл. - контрольна точка платформи; Оплхплуплzпл - нерухома система координат з полюсом в контрольній точці К пл. ; Oxyz , Ооб х об у об zоб - нерухомі системи координат, полюси яких при нерухомому об'єкті співпадають з контрольною точкою К об. ; * , * , * - задані літакові кути Ейлера, що визначають відносну орієнтацію осей систем координат Oxyz і Ооб х об у об zоб при нерухомому об'єкті. При нерухомому об'єкті осі системи координат Ооб х об у об zоб паралельні відповідним осям нерухомої системи координат Оплхплуплzпл . Еліпс 6 траєкторії при нерухомому об'єкті належить площині Оху системи координат Oxyz , a його азимут співпадає з віссю Ох . Віброзбуджувачі і блоки системи вібровипробувань на кресленні не показано. Послідовність реалізації способу випробувань складається з наступних етапів. 2 UA 75080 U 5 Етап визначення (ідентифікації) матриці передатних функцій W p . Перед початком випробувань на платформі 1 трикоординатного поступального вібростенду через пружні елементи 3-5 закріплюють об'єкт випробувань 2. В контрольних точках К пл. , К об. платформи і об'єкта встановлюють трикоординатні вібровимірювальні перетворювачі (місця розташування контрольних точок визначаються нормативним документом), осі чутливості яких співпадають з осями систем координат Оплхплуплzпл та Ооб х об у об zоб відповідно. В контрольній точці платформи К пл. відтворюють системою вібровипробувань ' хід ; уід ; zід , пл пл пл ід трикоординатну поступальну вібрацію Qпл одночасно вимірюють виникаючу при цьому 10 ід Qоб х ід ; у ід ; zід об об об а в контрольній точці К об. трикоординатну поступальну вібрацію об'єкта випробувань. Закон зміни за часом і тривалість дії вектора ' ідентифікації (індекс "ід") матриці передатних функцій ід Qпл W p визначається нормативним ід документом. З урахуванням отриманих векторів Qпл і Q ід виконують ідентифікацію матриці об передатних функцій, що зв'язує трикоординатні поступальні вібрації платформи 1 W p 15 20 вібростенда і об'єкта 2 в контрольних точках К пл. , і К об. (Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. - М.: Наука. Гл. ред. физ.-мат. лит., 1991. - 432 с.). Для матриці W p визначають обернену матрицю W 1p (Гусак А.А. и др. Справочник по высшей математике/ А.А. Гусак, Г.М. Гусак, Е.А. Бричикова. - Мн.: ТетраСистемс, 1999. - С. 109114). Етап визначення заданої трикоординатної поступальної вібрації Qпл.к.т. контрольної точки К пл. платформи вібростенда в системі координат Оплхплуплzпл . Формують вектор 25 * * x * t a sin t 2 Q * y * t b * sin * t 0 0 заданої вібрації контрольної точки К об. об'єкта в системі координат Oxyz , де * , a * , b * задані частота віброзбудження, велика та мала півосі еліпса траєкторії (визначаються нормативним документом). В системі координат Oxyz траєкторією контрольної точки К об. об'єкту є еліпс з великою a * і малою b * півосями і азимутом, що співпадає з віссю Ох . Відповідно до заданих кутів Ейлера * , * , * (визначаються нормативним документом) визначається орієнтація осей системи координат Oxyz відносно системи координат 30 35 Ооб х об у об zоб . Одночасно кути Ейлера визначають також співпадіння осі Ох , а виходить і азимуту еліптичної траєкторії, або з напрямком найменшої жорсткості підвіски об'єкта, або з напрямком його найбільшої податливості, або напрямком його найбільшого інерційного механічного навантаження (тип співпадіння визначається нормативним документом). * Визначається вектор Qоб.к.т. заданої трикоординатної поступальної вібрації контрольної точки К об. об'єкта в системі координат Ооб х об у об zоб відповідно до співвідношення x * t A sin * t x об.к.т. x * Qоб.к.т. Мпер Q * y об.к.т. t A y sin * t y z * * об.к.т. t A z sin t z де 3 , UA 75080 U cos * cos * sin * sin * sin * Mпер sin * cos * cos * sin * sin * cos * sin * sin * cos * cos * cos * sin * cos * sin * sin * cos * sin * sin * sin * cos * cos * sin * cos * cos * , - перетворювальна матриця, яка через задані кути Ейлера * , * , * , перетворює вектор Q * 5 * заданої вібрації контрольної точки К об. об'єкта в системі координат Oxyz у вектор Qоб.к.т. заданої вібрації контрольної точки К об. об'єкта в системі координат Ооб х об у об zоб [Лурье А.И. Аналитическая механика. - М.: Физ-мат. лит, 1961. - С. 53-54], A x , A y , A z - амплітуди сигналів x об.к.т. t , y об.к.т. t , zоб.к.т. t , які розраховуються за виразом 10 * * * * * 2 * * * 2 cos cos sin sin sin a sin cos b A x 2 2 Ay sin * cos * cos * sin * sin * a * cos * cos * b * , 2 2 A z cos * sin * a * sin * b * x , y , z - зсуви фаз сигналів x об.к.т. t , y об.к.т. t , zоб.к.т. t , які визначаються за співвідношенням sin * cos * b * arcsin 2 2 cos * cos * sin * sin * sin * a * sin * cos * b * x cos * cos * b * , y arcsin 2 2 z sin * cos * cos * sin * sin * a * cos * cos * b * sin * b * arcsin 2 2 cos * sin * a * sin * b * * * * * * * якщо виконуються умови sin cos b 0 , cos cos b 0 і sin * b * 0 , sin * cos * b * arccos 2 2 cos * cos * sin * sin * sin * a * sin * cos * b * x cos * cos * b * , y arccos 2 2 z sin * cos * cos * sin * sin * a * cos * cos * b * sin * b * arccos 2 2 cos * sin * a * sin * b * * * * * * * * якщо виконуються умови sin cos b 0 , cos cos b 0 і sin b * 0 . 15 * Визначається вектор Qпл.к.т. заданої трикоординатної поступальної вібрації контрольної точки К пл. платформи вібростенда в системі координат Оплхплуплzпл за виразом * * Qпл.к.т. W 1p Qоб.к.т. . Етап випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації. 20 25 * В контрольній точці К пл. платформи системою випробувань відтворюють вектор Qпл.к.т. заданої вібрації. При цьому об'єкт випробувань проходить випробування на вібронадійність в умовах трикоординатної поступальної вібрації. Застосування способу випробувань забезпечує проведення випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації в режимі відтворення в нерухомій системі координат Oxyz , полюс якої співпадає з контрольною точкою К об. об'єкта, еліптичної траєкторії заданої форми і орієнтації, азимут якої співпадає або із заданим 4 UA 75080 U напрямком найменшої жорсткості підвіски об'єкта, або заданим напрямком його найбільшої податливості, або заданим напрямком його найбільшого інерційного механічного навантаження. В результаті розширюються функціональні можливості способу випробувань. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 Спосіб випробувань об'єкта на вібронадійність в умовах трикоординатної поступальної вібрації, при якому сигнал управління вібростендом формують з урахуванням попередньо виміряної матриці передатних функцій W p , що зв'язує трикоординатні поступальні вібрації платформи Qпл.к.т. і об'єкта випробувань Qоб.к.т. в контрольних точках К пл. і К об. , а в контрольній точці К пл. платформи трикоординатного поступального вібростенда відтворюють вектор заданої вібрації 15 * * Qпл.к.т. W 1p Qоб.к.т. , який відрізняється * Qоб.к.т. тим, що вектор заданої трикоординатної поступальної вібрації контрольної точки К об. об'єкта визначають відповідно до співвідношення: А х sin * t x * Qоб.к.т. А y sin * t y , де А z sin * t z W 1p - обернена матриця передатних функцій, * * * * * 2 * * * 2 cos cos sin sin sin a sin cos b A x 2 2 Ay sin * cos * cos * sin * sin * a * cos * cos * b * , 2 2 A z cos * sin * a * sin * b * sin * cos * b * arcsin 2 2 cos * cos * sin * sin * sin * a * sin * cos * b * x cos * cos * b * y arcsin 2 2 z sin * cos * cos * sin * sin * a * cos * cos * b * sin * b * arcsin 2 2 cos * sin * a * sin * b * 20 , якщо виконуються умови sin * cos * b * 0 , cos * cos * b * 0 і sin * b * 0 , arccos x y arccos z cos sin sin * cos * b * * sin cos * sin * sin * sin * a * 2 * cos * b * * cos * b * cos * cos * b * * cos cos * cos * sin * sin * a * arccos 2 sin * b * cos sin a sin b * * * 2 * * 2 2 2 , якщо виконуються умови sin * cos * b * 0 , cos * cos * b * 0 і sin * b * 0 ; * , a * , b * - задані частота віброзбудження, велика та мала півосі еліпсу траєкторії вектора * Qоб.к.т. заданої вібрації контрольної точки К об. об'єкта в нерухомій системі координат Oxyz , 25 * , * , * - задані літакові кути Ейлера, що визначають відносну орієнтацію осей систем координат Oxyz і при нерухомому об'єкті, Ооб х об у об zоб - нерухома система координат, осі 5 UA 75080 U якої паралельні відповідним осям нерухомої системи координат Оплхплуплzпл з полюсом в контрольній точці К пл. платформи трикоординатного поступального вібростенда, причому при нерухомому об'єкті полюси О і Ооб систем координат Oxyz і Ооб х об у об zоб співпадають з контрольною точкою К об. , еліпс траєкторії належить площині Оху системи координат Oxyz , а її 5 вісь Ох співпадає з азимутом заданої еліптичної траєкторії контрольної точки К об. об'єкта. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing an object on vibro-reliability under conditions of three-coordinate translational vibration
Автори англійськоюShpachuk Volodymyr Petrovych, Nikitina Hanna Oleksandrivna, Dudko Vadym Valentynovych
Назва патенту російськоюСпособ испытаний объекта на вибронадежность в условиях трехкоординатной поступательной вибрации
Автори російськоюШпачук Владимир Петрович, Никитина Анна Александровна, Дудко Вадим Валентинович
МПК / Мітки
МПК: G01M 7/00
Мітки: поступальної, спосіб, вібронадійність, умовах, трикоординатної, об'єкту, випробувань, вібрації
Код посилання
<a href="https://ua.patents.su/8-75080-sposib-viprobuvan-obehktu-na-vibronadijjnist-v-umovakh-trikoordinatno-postupalno-vibraci.html" target="_blank" rel="follow" title="База патентів України">Спосіб випробувань об’єкту на вібронадійність в умовах трикоординатної поступальної вібрації</a>
Спосіб випробувань агрегатів автоматики на спільну дію вібрації та поперечної сили і пристрій для здійснення способу
Номер патенту: 18657
Опубліковано: 25.12.1997
Автори: Ногаєць Анатолій Іванович, Дубліщева Ольга Михайлівна, Порубаймех Володимир Ілліч
МПК: G01M 7/00
Мітки: агрегатів, автоматики, пристрій, сили, дію, поперечної, здійснення, вібрації, способу, випробувань, спосіб, спільну
Формула / Реферат:
1. Способ испытаний агрегатов автоматики на совместное действие вибрации и поперечной силы путем его установки с помощью приспособления на стол вибрационной установки, создания нормативной вибрации и приложения поперечной виброударному нагружению силы, отличающийся тем, что направляют поперечную силу через центр тяжести испытуемого агрегата автоматики перпендикулярно к направлению виброударного нагружения и изменяют величину поперечной силы в...
Спосіб вогневих випробувань ракетних двигунів у польових умовах після їх тривалого зберігання
Номер патенту: 55274
Опубліковано: 17.03.2003
Автори: Нізамієв Равіль Мазітович, Доценко Борис Іванович, Михайленко Георгій Володимирович, Семенов Леонід Антонович, Єршов Володимир Васильович, Іванов Віталій Степанович, Яковенко Петро Олексійович, Сафронов Михайло Васильович
МПК: F02K 9/00, F02K 9/96, G01M 15/14
Мітки: ракетних, умовах, спосіб, зберігання, двигунів, польових, випробувань, тривалого, вогневих
Формула / Реферат:
Спосіб вогневих випробувань ракетних двигунів у польових умовах після їх тривалого зберігання, який полягає в тому, що двигун передньою (донною) частиною встановлюють і закріплюють на стенді вогневих випробувань, проводять дистанційно запуск і реєстрацію характеристик двигуна за допомогою вимірювально-реєструючої апаратури, який відрізняється тим, що на відкритій робочій площадці встановлюють і закріплюють стендову підставку, на якій...
Спосіб визначення буксирувальної погодинної витрати рідкого палива в умовах ходових випробувань суден, у яких головний двигун – дизель
Номер патенту: 93401
Опубліковано: 10.02.2011
Автори: Корнієць Євген Павлович, Корнієць Павло Євгенійович, Корнієць Тетяна Євгенівна, Корнієць Олег Євгенович
Мітки: спосіб, буксирувальної, визначення, дизель, рідкого, палива, головний, суден, умовах, ходових, погодинної, двигун, витрати, яких, випробувань
Формула / Реферат:
Спосіб визначення буксирувальної погодинної витрати рідкого палива в умовах ходових випробувань суден, у яких головний двигун - дизель, який полягає у тому, що замірюють поточне значення швидкості руху судна, для якої з графіка "Залежностей буксирувальних опору руху і потужності в умовах ходових випробувань - і
Вібростенд для випробувань виробів на дію вертикальної і кутової вібрації відносно горизонтальних осей
Номер патенту: 5879
Опубліковано: 29.12.1994
Автори: Фомін Володимир Нілович, Проценко Ігор Павлович, Шпачук Володимир Петрович, Божко Олександр Євгенович, Попов Борис Семенович, Приходько Олег Борисович
МПК: G01M 7/00
Мітки: відносної, дію, кутової, випробувань, виробів, горизонтальних, вертикальної, вібростенд, вібрації, осей
Формула / Реферат:
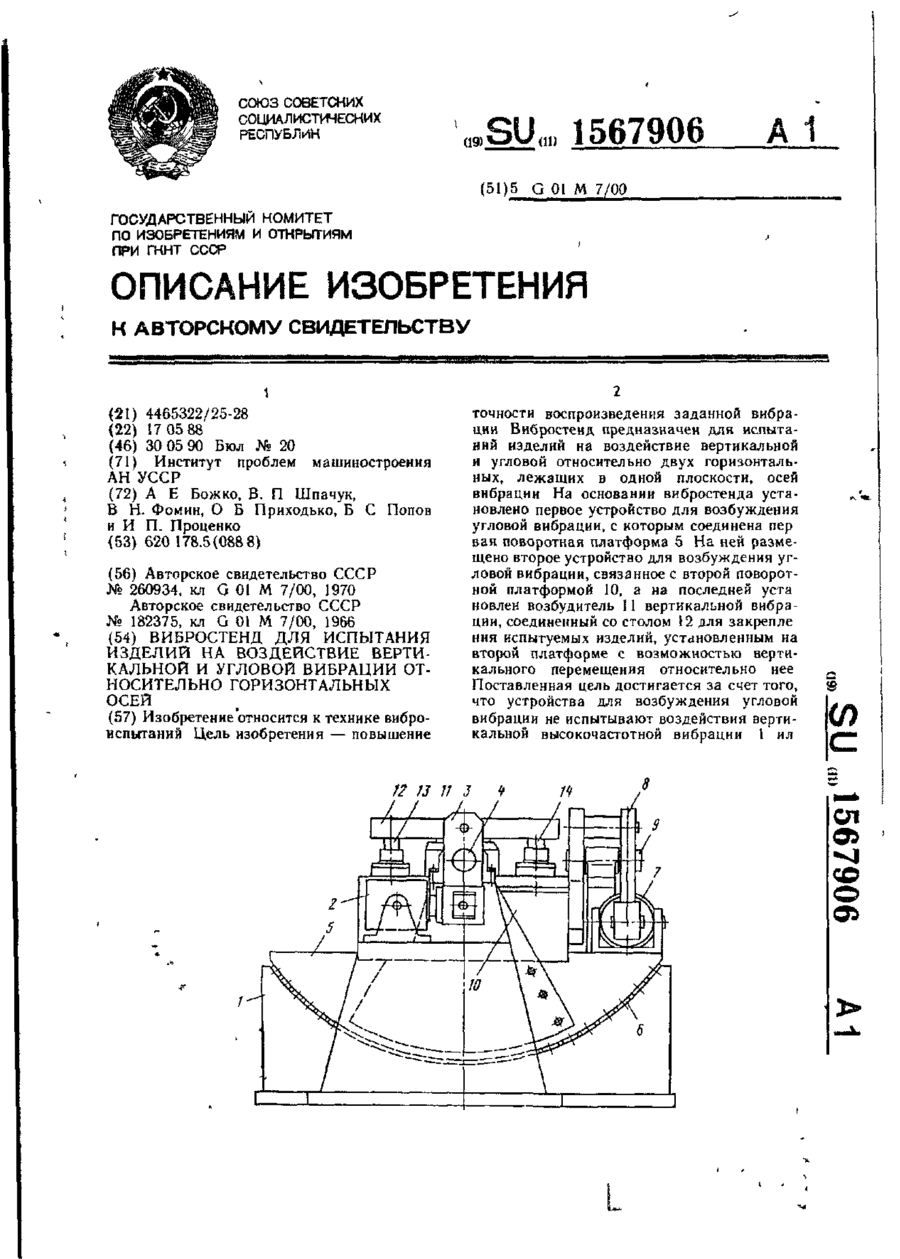
Вибростенд для испытания изделий на воздействие вертикальной и угловой вибрации относительно горизонтальных осей, содержащий основание, установленное на нем первое устройство для возбуждения угловой вибрации, соединенную с ним поворотную первую платформу, размещенные на платформах возбудитель вертикальной вибрации и второе устройство для возбуждения угловой вибрации и стол для закрепления испытуемых изделий, отличающийся тем, что, с...
Спосіб одержання поступальної рушійної сили і рушій амеліна для його здійснення
Номер патенту: 69203
Опубліковано: 16.08.2004
Автор: Амелін Юрій Михайлович
МПК: B60K 16/00
Мітки: рушій, амеліна, рушійної, одержання, поступальної, здійснення, спосіб, сили
Формула / Реферат:
1. Спосіб одержання поступальної рушійної сили, яка включає дію на зовнішню поверхню рушія, створення перепаду тисків середовища, який відрізняється тим, що створюють перепад тисків середовища поміж тиском одночасно у вакуумній порожнині і в ємностях стаканів рушія та тиском на зовнішні поверхні дна цих стаканів, одержують атмосферний напір на зовнішні поверхні дна стаканів, розташованих з одного боку рушія за межами його зовнішньої поверхні,...
Попередній патент: Літолітичний засіб “калькуліз” для консервативного лікування хронічного простатиту, ускладненого конкрементами в передміхуровій залозі
Наступний патент: Спосіб відбору кнурів-плідників за статевими функціями
Випадковий патент: Транспортний засіб