Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 78129
Опубліковано: 15.02.2007
Автори: Шовгун Віталій Андрійович, Біличенко Іван Федорович, Білановський Михайло Миколайович, Толстіхін Микола Вікторович, Андрусенко Микола Іванович, Єна Григорій Олександрович, Ліпатов Валерій Павлович
Формула / Реферат
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, яка відрізняється тим, що додатково введені антена компенсації бокового випромінювання, антена компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання.
2. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що антена містить антенне дзеркало, редуктор, датчик кута, перший обертовий пристрій, другий обертовий пристрій, опромінювачі діапазонів радіохвиль L, S, С, Х і вхідні пристрої, що містять вхідні надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, перетворювачі частоти діапазонів L, С, Χ і НВЧ-перемикач, при цьому вхід редуктора є першим входом антени, а вихід з'єднаний з антенним дзеркалом і датчиком кута, другий вхід і вихід якого, підключені через перший обертовий пристрій, є відповідно другим входом і першим виходом антени, опромінювач діапазону радіохвиль L через вхідний НВЧ-підсилювач діапазону L та перетворювач частоти діапазону L підключений до першого входу НВЧ-перемикача, опромінювач діапазону радіохвиль S підключений до другого входу НВЧ-перемикача, опромінювач діапазону радіохвиль С через вхідний НВЧ-підсилювач діапазону С та перетворювач частоти діапазону С підключений до третього входу НВЧ-перемикача, опромінювач діапазону радіохвиль X через вхідний НВЧ-підсилювач діапазону Χ та перетворювач частоти діапазону X підключений до четвертого входу НВЧ-перемикача, п'ятий вхід та вихід якого підключені через другий обертовий пристрій до четвертого входу та другого виходу антени.
3. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що приймач містить НВЧ-підсилювач, подільник потужності, N смугопропускних фільтрів (СПФ) і N детекторів підсилювачів, при цьому вхід НВЧ-підсилювача є входом приймача, вихід НВЧ-підсилювача через N виходів подільника потужності з'єднаний з входами СПФ, виходи яких в свою чергу підключені до входів детекторів підсилювачів, виходи яких є виходом приймача.
4. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що блок порівняння містить N схем, кожна із яких містить перший, другий та третій компаратори, схему рівнозначності, датчик порогу визначення, формувач коротких імпульсів, формувач імпульсів, схему сумісності і тригер, при цьому перші входи компараторів є першим входом блока порівняння, другі входи другого та третього компараторів є, відповідно, другим та третім входами блока порівняння, другий вхід третього компаратора з'єднаний з виходом датчика порогу визначення, виходи першого та другого компараторів через схему рівнозначності, формувач коротких імпульсів і перший вхід схеми сумісності підключені до С-входу тригера, до якого через другий вхід схеми сумісності і формувач імпульсів підключений також вихід третього компаратора, а R-вхід тригера підключений до згаданого виходу третього компаратора.
5. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що блок аналізу містить перший ключ, другий ключ, К перших оперативно запам'ятовуючих пристроїв (ОЗП1), К других ОЗП (ОЗП2), перший пороговий суматор, другий пороговий суматор, а також схему рівнозначності, при цьому вихід першого ключа підключений до входу послідовно з'єднаних перших ОЗП1, вихід другого ключа підключений до входу послідовно з'єднаних других ОЗП2, другі виходи першого і К-того ОЗП1 підключені до входів першого порогового суматора, другі виходи першого і К-того ОЗП2 підключені до входів другого порогового суматора, перший вхід першого ключа є першим входом блока аналізу, перший вхід другого ключа є другим входом блока аналізу, виходи першого та другого порогових суматорів через схему рівнозначності з'єднані з виходом блока аналізу, а паралельно з'єднані другі входи першого та другого ключів К ОЗП1 і К ОЗП2 є третім входом блока аналізу.
Текст
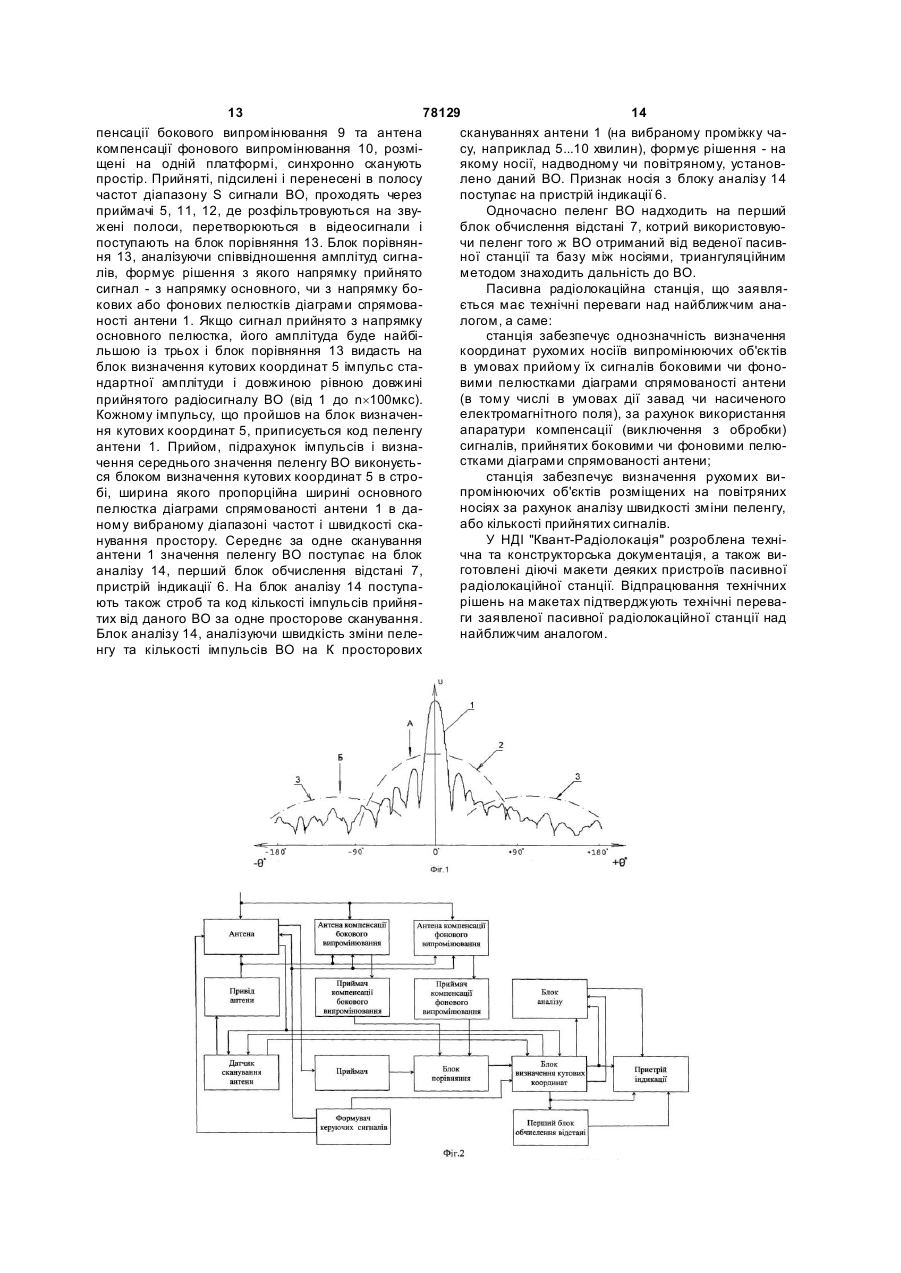
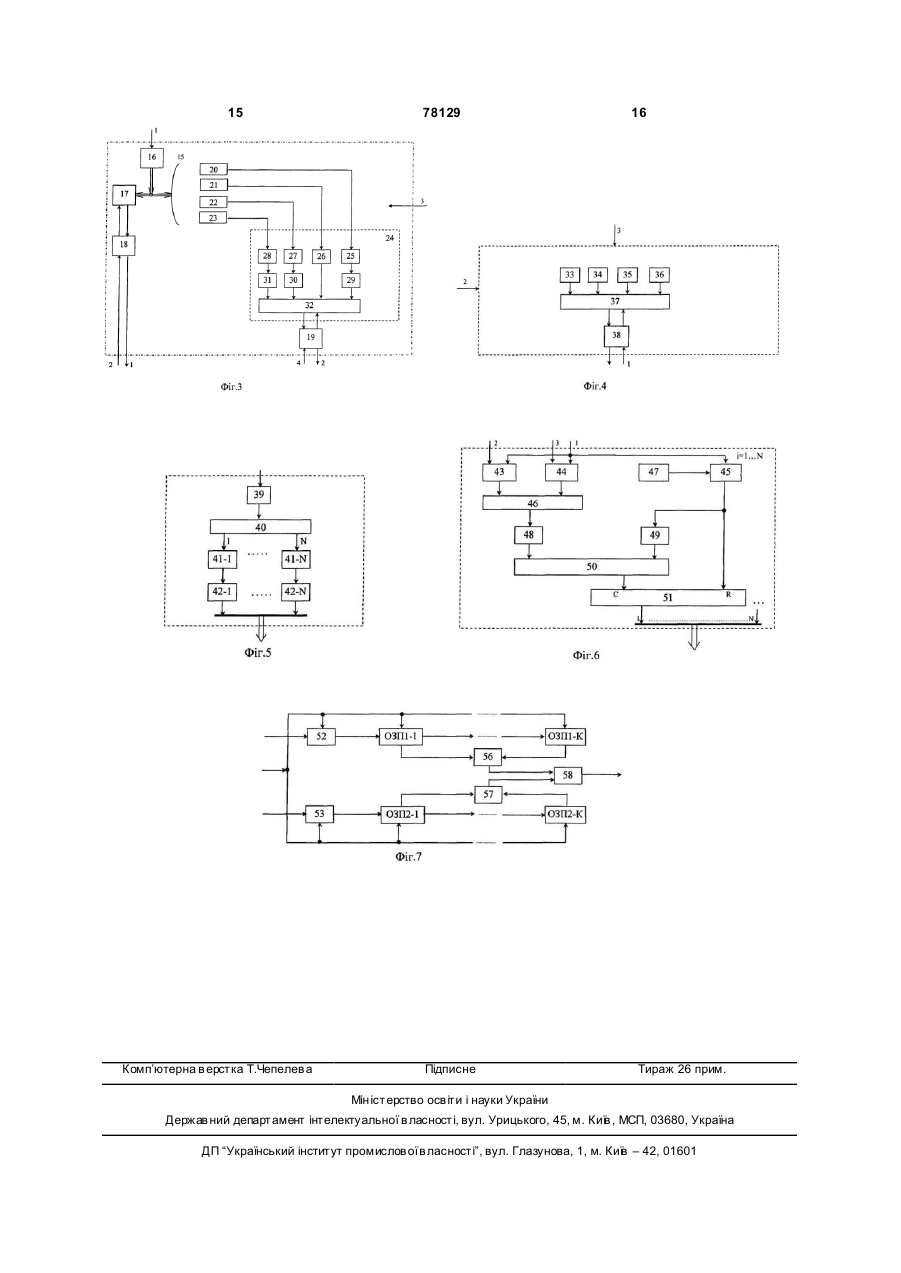
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючи х сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий ви хід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючи х сигналів підключений до другого входу антени, другий ви хід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, яка відрізняється тим, що додатково введені антена компенсації бокового випромінювання, антена компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового 2 (19) 1 3 78129 4 ний НВЧ-підсилювач діапазону Χ та перетворювач першого та другого компараторів через схему рівчастоти діапазону X підключений до четвертого нозначності, формувач коротких імпульсів і первходу НВЧ-перемикача, п'ятий вхід та вихід якого ший вхід схеми сумісності підключені до С-входу підключені через другий обертовий пристрій до тригера, до якого через другий вхід схеми сумісночетвертого входу та другого ви ходу антени. сті і формувач імпульсів підключений також вихід 3. Пасивна радіолокаційна станція вимірювання третього компаратора, а R-вхід тригера підключекоординат носіїв надводних та повітряних випроний до згаданого виходу третього компаратора. мінюючих об'єктів за п. 1, яка відрізняється тим, 5. Пасивна радіолокаційна станція вимірювання що приймач містить НВЧ-підсилювач, подільник координат носіїв надводних та повітряних випропотужності, N смугопропускних фільтрів (СПФ) і N мінюючих об'єктів за п. 1, яка відрізняється тим, детекторів підсилювачів, при цьому вхід НВЧщо блок аналізу містить перший ключ, другий підсилювача є входом приймача, вихід НВЧключ, К перших оперативно запам'ятовуючи х припідсилювача через N виходів подільника потужностроїв (ОЗП1), К др уги х ОЗП (ОЗП2), перший порості з'єднаний з входами СПФ, виходи яких в свою говий суматор, другий пороговий суматор, а також чергу підключені до входів детекторів підсилювасхему рівнозначності, при цьому вихід першого чів, ви ходи яких є ви ходом приймача. ключа підключений до входу послідовно з'єднаних 4. Пасивна радіолокаційна станція вимірювання перших ОЗП1, вихід другого ключа підключений до координат носіїв надводних та повітряних випровходу послідовно з'єднаних други х ОЗП2, другі мінюючих об'єктів за п. 1, яка відрізняється тим, виходи першого і К-того ОЗП1 підключені до входів що блок порівняння містить N схем, кожна із яких першого порогового суматора, другі виходи пермістить перший, другий та третій компаратори, шого і К-того ОЗП2 підключені до входів другого схему рівнозначності, датчик порогу визначення, порогового суматора, перший вхід першого ключа формувач коротких імпульсів, формувач імпульсів, є першим входом блока аналізу, перший вхід друсхему сумісності і тригер, при цьому перші входи гого ключа є другим входом блока аналізу, ви ходи компараторів є першим входом блока порівняння, першого та другого порогових суматорів через другі входи другого та третього компараторів є, схему рівнозначності з'єднані з виходом блока відповідно, другим та третім входами блока поріваналізу, а паралельно з'єднані другі входи першоняння, другий вхід третього компаратора з'єднаний го та другого ключів К ОЗП1 і К ОЗП2 є третім вхоз виходом датчика порогу визначення, виходи дом блока аналізу. Винахід належить до галузі пасивної локації, а саме, до пристроїв, що забезпечують вимірювання координат та параметрів руху надводних та повітряних об'єктів на основі прийому та обробки сигналів, випромінюваних їх штатними радіотехнічними системами (радіолокаційними станціями, тощо). Технічні рішення, реалізовані в пасивній станції, можуть бути використані також в системах радіомоніторингу та радіонавігації. Відомо, що для визначення координат (пеленг, дальність) місцезнаходження рухомого носія випромінюючого об'єкта (ВО) з використанням пасивних радіолокаційних пристроїв потрібно виконати вимірювання його кутових напрямків (пеленга) з рознесених у просторі на деяку відстань (базу) точок. У простішому випадку, при одночасному вимірюванні з двох точок, місцезнаходження носія ВО визначається триангуляційним способом, як точка перетину двох ліній пеленгів ["Теоретические основы радиолокации" под ред. Ширмана, М.,"Сов. радио", 1970]. Координати місцезнаходження ВО можуть визначатись також і одним пасивним пристроєм розміщеним на рухомому носії, в якому під час руху відбувається формування бази [А.Г.Николаев, С.В. Перцов "Радиотеплолокация" (пассивная радиолокация), М., "Сов. радио", 1964]. Для компенсації переміщення носія ВО, носій пасивного пристрою виконує прямий та зворотний галси курсом, перпендикулярним пеленгу ВО і з постійною швидкістю. На прямому галсі пасивний пристрій виконує поточне багаторазове вимірювання і обробку пеленгів ВО. По обробленим пеленгам прямого галсу на зворотному галсі проводиться екстраполювання пеленгу ВО, за умови, що носій пристрою продовжує рухатись в напрямку прямого галсу. На зворотному галсі носія пасивний пристрій також виконує велике число замірів пеленгу ВО і оброблює їх. По обробленому пеленгу зворотного галсу і екстрапольованому, з урахуванням величини бази пройденої носієм на зворотному галсі, пеленгу уявного прямого галсу, триангуляційним методом знаходиться дальність до ВО. Такий метод реалізований в пасивній станції відповідно [до патенту UА №52633 G01S5/01, G01S5/06, публ. 15.01.2003р.]. Очевидно, що похибка вимірювання пеленгу відіграє важливу роль і обумовлює похибку визначення місцезнаходження ВО. Відомо, що антена пасивного радіолокаційного пристрою може приймати радіосигнали ВО не тільки основним, але і боковими та фоновими пелюстками діаграми її спрямованості (И.С. Кукес, М.Е. Старик "Основы радиопеленгации "М., "Сов. радио", 1964г). Прийом, обробка і використання пеленгів таких сигналів, суттєво збільшують похибку, а інколи повністю унеможливлюють визначення дійсного пеленгу ВО. Для виявлення дійсного напрямку приходу сигналу використовують різні методи аналізу прийнятих сигналів ВО, наприклад амплітудний, який реалізований в радіопеленгаторній системі, [патент GB №2243041, G01S3/28]. Система містить кільцеву решітку антен, рівномірно рознесених навколо центральної осі. Для виявлення дійсного напрямку приходу сигналу, всі сигнали прийняті різними антенами порівнюються по амплітуді та 5 78129 6 частоті і таким чином знаходиться напрямок найяка дозволила би забезпечити однозначність вибільш інтенсивного сигналу, тобто пеленг ВО. Помірювання координат та параметрів руху надводхибка одноразового вимірювання пеленгу пеленних та повітряних випромінюючих об'єктів. гатором становить не менше половини ширини Поставлена задача вирішується тим, що в діаграми спрямованості його антени. В названій пристрій для визначення координат випромінююсистемі одна (із восьми) антена перекриває зону чого об'єкта, який містить антену, привід антени, кутів 45град., тобто, похибка вимірювання пеленгу датчик сканування антени, приймач, блок визнапри цьому, становить не менше 22,5град. чення кутових координат, пристрій індикації, перНедоліком системи є потреба в значній кількоший блок обчислення відстані, формувач керуюсті антен, що для забезпечення високої точності чих сигналів, при цьому перший вхід антени через пеленгування (похибка не більше 1град.), обумовпривід антени підключений до першого виходу лює використання антен великих розмірів і робить датчика сканування антени, перший вихід антени неможливим їх розміщення на рухомих носіях. підключений до першого входу датчика скануванНайбільш близький по технічній суті і досяжня антени та другого входу блока визначення куному технічному результату є пристрій для визнатових координат, третій вхід якого підключений до чення координат рухомого випромінюючого об'єкдругого виходу датчика сканування антени, четвета, який розміщений на одному носії, наприклад ртий вихід підключений до другого входу датчика ведучому, приймальному пунктах, [патент UA сканування антени, перший вихід підключений до 46245, G01S3/02, G01S5/04, публ. 15.11.2004р.] перших входів пристрою індикації і першого блока Відомий пристрій для визначення координат обчислення відстані, другий вихід підключений до випромінюючого об'єкта містить антену, привід другого входу пристрою індикації, третій вхід приантени, датчик сканування антени, приймач, блок строю індикації підключений до виходу першого визначення кутових координат, пристрій індикації, блока обчислення відстані, перший вихід формуперший блок обчислення відстані, формувач кевача керуючих сигналів підключений до другого руючи х сигналів, в якому, перший вхід антени чевходу антени, другий вихід підключений до четверез привід антени підключений до першого виходу ртого входу блока визначення кутових координат, датчика сканування антени, перший вихід антени а третій вхід антени та др угий вхід першого блока підключений до першого входу датчика скануванобчислення відстані є входами пристрою. Згідно ня антени та другого входу блока визначення кувинаходу, додатково введені антена компенсації тових координат, третій вхід якого підключений до бокового випромінювання, антена компенсації фодругого виходу датчика сканування антени, четвенового випромінювання, приймач компенсації бортий вихід підключений до другого входу датчика кового випромінювання, приймач компенсації фосканування антени, перший вихід підключений до нового випромінювання, блок порівняння та блок перших входів пристрою індикації і першого блока аналізу, при цьому ви хід антени компенсації бокообчислення відстані, другий вихід підключений до вого випромінювання через приймач компенсації другого входу пристрою індикації, третій вхід прибокового випромінювання підключений до другого строю індикації підключений до виходу першого входу блока порівняння, вихід антени компенсації блока обчислення відстані, перший вихід формуфонового випромінювання через приймач компенвача керуючих сигналів підключений другого входу сації фонового випромінювання підключений до антени, другий вихід підключений до четвертого третього входу блока порівняння, вихід якого підвходу блока визначення кутових координат а треключений до першого входу блока визначення тій вхід антени та другий вхід першого блока обчикутови х координат, згадані другий та третій, а таслення відстані є входами пристрою. кож п'ятий виходи блока визначення кутових коорНайближчий аналог працює таким чином. Андинат підключені до входів блока аналізу, ви хід тена ведучого пасивного пристрою, розміщеного якого підключений до четвертого входу пристрою на одному носії, сканує простір та знаходить пеіндикації, згаданий вихід приводу антени підклюленг на ВО. Пеленг на той же ВО знаходить і анчений до перших входів антени компенсації бокотена веденого пасивного пристрою, розміщеного вого випромінювання та антени компенсації фонона другому носії. Ведучий та ведений пасивні привого випромінювання, другі входи яких та строї обмінюються між собою інформацією, котра, четвертий вхід антени підключені до третього викрім пеленгів ВО, містить дальність, тобто базу між ходу формувача керуючих сигналів, а згаданий носіями. По відомим двом пеленгам ВО і величині третій вхід антени з'єднаний з третіми входами бази між ними в першому блоці обчислення відантени компенсації бокового випромінювання та стані тріангуляційним методом знаходиться дальантени компенсації фонового випромінювання. ність до ВО. Крім того, в пасивній радіолокаційній станції Недоліком найближчого аналогу є те, що привимірювання координат носіїв надводних та повітйом та обробка ним сигналів ВО, прийнятих бокоряних випромінюючих об'єктів, згідно винаходу, вими та фоновими пелюстками діаграми спрямоантена містить антенне дзеркало, редуктор, датваності його антени, призводить до чик кута, перший обертовий пристрій, другий обенеоднозначного вимірювання пеленгу і, як насліртовий пристрій, опромінювачі діапазонів радіодок до значних похибок вимірювання дальності до хвиль L, S, С, X і вхідні пристрої, що містять вхідні ВО, що в свою чергу унеможливлює визначення надвисокочастотні (НВЧ) підсилювачі діапазонів L, параметрів (швидкості, напрямку) їх р уху. S, С, X, перетворювачі частоти діапазонів L, С, Х і В основу винаходу поставлена задача створиНВЧ перемикач при цьому, вхід редуктора є перти пасивну станцію вимірювання координат носіїв шим входом антени а вихід з'єднаний з антенним надводних та повітряних випромінюючих об'єктів, дзеркалом і датчиком кута др угий вхід і ви хід яко 7 78129 8 го, підключені через перший обертовий пристрій, є схему рівнозначності з'єднані з виходом блока відповідно другим входом і першим виходом антеаналізу а паралельно з'єднані другі входи першого ни, опромінювач діапазону радіохвиль L, через та другого ключів, К ОЗП1 і К ОЗП2 є третім вховхідний НВЧ підсилювач діапазону L та перетводом блока аналізу. рювач частоти діапазону L, підключений до першоТака побудова пасивної радіолокаційної станго входу НВЧ перемикача, опромінювач діапазону ції вимірювання координат забезпечує однозначрадіохвиль S, підключений до другого входу НВЧ ність визначення координат ВО розміщених на перемикача, опромінювач діапазону радіохвиль С, надводних носіях, а також дозволяє визначити через вхідний НВЧ підсилювач діапазону С та пеповітряні носії ВО. ретворювач частоти діапазону С підключений до Суть винаходу роз'яснюється наступним опитретього входу НВЧ перемикача, опромінювач сом та кресленнями, де: діапазону радіохвиль X, через вхідний НВЧ підсина Фіг.1 наведені суміщені діаграми спрямовалювач діапазону Х та перетворювач частоти діаності антени (крива 1), антени компенсації боковопазону X, підключений до четвертого входу НВЧ го випромінювання (крива 2) та антени компенсації перемикача п'ятий вхід та ви хід якого, підключені фонового випромінювання (крива 3); через другий обертовий пристрій, є відповідно на Фіг.2 наведена блок-схема пасивної радіочетвертим входом та другим виходом антени. локаційної станції вимірювання координат носіїв Крім того, в пасивній радіолокаційної станції надводних та повітряних випромінюючих об'єктів; вимірювання координат носіїв надводних та повітна Фіг.3 наведена блок-схема антени; ряних випромінюючих об'єктів, згідно винаходу, на Фіг.4 наведена блок-схема антени компенприймач містить НВЧ підсилювач, подільник потусації бокового випромінювання; жності, N смугопропускних фільтрів (СПФ) і N дена Фіг.5 наведена блок-схема приймача; текторів-підсилювачів при цьому, вхід НВЧ підсина Фіг.6 наведена блок-схема блока полювача є входом приймача, вихід НВЧ рівняння; підсилювача через N виходів подільника потужнона Фіг.7 наведена блок-схема блока аналізу. сті, з'єднаний з входами СПФ, виходи яких в свою Розгляд суміщених діаграм засвідчує, що ампчергу підключені до входів де текторівлітуда сигналів прийнятих антеною (крива 1 Фіг.1) підсилювачів виходи яких є ви ходом приймача 4. перевищує амплітуду сигналів прийнятих антеною Крім того, в пасивній радіолокаційній станції компенсації бокового випромінювання та антеною вимірювання координат носіїв надводних та повіткомпенсації фонового випромінювання (криві 2, 3 ряних випромінюючих об'єктів, згідно винаходу, Фіг.1) тільки в одному напрямку - напрямку основблок порівняння містить N схем кожна із яких місного пелюстка діаграми спрямованості. тить перший, другий та третій компаратори, схему Прийнятий з одного і того ж напрямку, наприрівнозначності, датчик порогу визначення, формуклад з напрямку А (Фіг.1) сигнал, поступає на вховач коротких імпульсів, формувач імпульсів, схему ди антени, антени компенсації бокового випромісумісності і тригер при цьому, перші входи компанювання та антени компенсації фонового раторів є першим входом блока порівняння, другі випромінювання. Далі, підсилені в приймачах сигвходи другого та третього компараторів є відповінали поступають на блок порівняння. Приймач, дно, другим та третім входами блока порівняння, приймач компенсації бокового випромінювання та другий вхід третього компаратора з'єднаний з виприймач компенсації фонового випромінювання ходом датчика порогу визначення, виходи першого підсилюють та перетворюють прийняті радіосигта другого компараторів через схему рівнозначнонали в відеосигнали, але мають однакові параместі, формувач коротких імпульсів і перший вхід три, тому амплітуди сигналів, що прийшли на блок схеми сумісності підключені до С-входу тригера, порівняння, зберігають співвідношення приведене до якого, через другий вхід схеми сумісності і фона Фіг.1. Блок порівняння, аналізуючи співвіднормувач імпульсів підключений також вихід третьошення амплітуд сигналів, формує рішення - сигнал го компаратора, R-вхід тригера підключений до прийнятий основним пелюстком діаграми спрямозгаданого виходу третього компаратора. ваності антени - так чи ні? Якщо сигнал прийнято Крім того, в пасивній радіолокаційній станції основним пелюстком (напрямок »0 градусів, Фіг.1), вимірювання координат носіїв надводних та повітто його амплітуда буде найбільшою із трьох і блок ряних випромінюючих об'єктів, згідно винаходу, порівняння дозволить його проходження на вхід блок аналізу містить перший ключ, другий ключ, К блока визначення кутових координат. Якщо сигнал перших оперативно запам'ятовуючи х пристроїв прийнятий з напрямку А (див. Фіг.1), тобто бокови(ОЗП1), К други х ОЗП (ОЗП2), перший пороговий ми пелюстками діаграми спрямованості антени, то суматор, другий пороговий суматор, а також схему його амплітуда буде меншою, за амплітуду того ж рівнозначності при цьому, вихід першого ключа сигналу прийнятого антеною компенсації бокового підключений до входу послідовно з'єднаних первипромінювання і блок порівняння, аналізуючи ших ОЗП1, вихід другого ключа підключений до співвідношення амплітуд сигналів, заборонить входу послідовно з'єднаних други х ОЗП2, другі прохід сигналу з ви ходу приймача. виходи першого і К-ого ОЗП1 підключені до входів Аналогічно станція працює, якщо сигнал буде першого порогового суматора, другі виходи перприйнято з напрямку Б (Фіг.1). В даному випадку шого і К-ого ОЗП2 підключені до входів другого амплітуда сигналу прийнята антеною компенсації порогового суматора, перший вхід першого ключа фонового випромінювання перевищить амплітуду є першим входом блока аналізу, перший вхід друсигналу прийнятого антеною. гого ключа є другим входом блока аналізу, ви ходи Запропонована пасивна радіолокаційна станпершого та другого порогових суматорів через ція вимірювання координат носіїв надводних та 9 78129 10 повітряних випромінюючих об'єктів (Фіг.1) містить діапазону L25 та перетворювач частоти діапазону антену 1, привід антени 2, датчик сканування анL29, підключений до першого входу НВЧ перемитени 3, приймач 4, блок визначення кутови х кооркача 32, опромінювач діапазону радіохвиль S26, динат 5, пристрій індикації 6, перший блок обчиспідключений до другого входу НВЧ перемикача 32, лення відстані 7, формувач керуючи х сигналів 8 опромінювач діапазону радіохвиль С22, через вхіантену компенсації бокового випромінювання 9, дний НВЧ підсилювач діапазону С27 та перетвоантену компенсації фонового випромінювання 10, рювач частоти діапазону С30, підключений до треприймач компенсації бокового випромінювання 11, тього входу НВЧ перемикача 32, опромінювач приймач компенсації фонового випромінювання діапазону радіохвиль Х23, через вхідний НВЧ під12, блок порівняння 13 та блок аналізу 14, при силювач діапазону Х28 та перетворювач частоти цьому перший вхід антени 1 через привід антени 2 діапазону Х31, підключений до четвертого входу підключений до першого виходу датчика скануНВЧ перемикача 32 п'ятий вхід та вихід якого, підвання антени 3, перший вихід антени 1 підключеключені через другий обертовий пристрій 19, є ний до першого входу датчика сканування антени відповідно четвертим входом та другим виходом 3 та другого входу блока визначення кутових коантени 1. ординат 5, третій вхід якого підключений до другоАнтена компенсації бокового випромінювання го виходу датчика сканування антени 3, четвертий 9, див. Фіг.5, містить решітку напівхвильових вібвихід підключений до другого входу датчика скараторів 33, решітку напівхвильових вібраторів 34, нування антени 3, перший вихід підключений до рупорну антену 35 і р упорну антену 36 ви ходи перших входів пристрою індикації 6 і першого блояких, через вхідні пристрої 37 і обертовий пристрій ка обчислення відстані 7, другий вихід підключе38, підключені до входу приймача компенсації фоний до другого входу пристрою індикації 6, третій нового випромінювання 11. Параметри (коефіцієнт вхід пристрою індикації 6 підключений до виходу підсилення та ширина діаграми спрямованості) першого блока обчислення відстані 7, перший виблоків 33, 34, 35 і 36 підібрані таким чином, щоб у хід формувача керуючи х сигналів 8 підключений всіх робочих діапазонах радіохвиль вони перевидругого входу антени 1, другий вихід підключений щували параметри бічних пелюстків діаграми до четвертого входу блока визначення кутових спрямованості антени 1 (криві 2 і 1 на Фіг.1). координат 5, третій вхід антени 1 та другий вхід Антена компенсації фонового випромінювання першого блока обчислення відстані 7 є входами 10 має таку ж саму побудову як і антена компенпристрою, вихід антени компенсації бокового висації бокового випромінювання 9, тільки її парамепромінювання 9 через приймач компенсації бокотри перевищують параметри антени 1 в районі вого випромінювання 11 підключений до другого фонового випромінювання (криві 3 і 1 на Фіг.1). входу блока порівняння 13, вихід антени компенАнтена 1, антена компенсації бокового випросації фонового випромінювання 10 через приймач мінювання 9 і антена компенсації фонового викомпенсації фонового випромінювання 12 підклюпромінювання 10 жорстко закріплені на одній почений до третього входу блока порівняння 13, виворотній платформі, що керується приводом хід якого підключений до першого входу блока антени 2. Максимуми діаграм спрямованості антевизначення кутових координат 5, згадані другий та ни 1 і антени компенсації бокового випромінювантретій, а також п'ятий виходи блока визначення ня 9 співпадають, а максимуми діаграм спрямовакутови х координат 5 підключені до входів блока ності антени компенсації фонового аналізу 14, ви хід якого підключений до четвертого випромінювання 10 орієнтовані відносно них під входу пристрою індикації 6, згаданий вихід привокутами ±90град. ду антени 2 підключений до перших входів антени Приймач 4, приймач компенсації бокового викомпенсації бокового випромінювання 9 та антени промінювання 11 та приймач компенсації фоновокомпенсації фонового випромінювання 10, другі го випромінювання 12 мають однакову побудову, входи яких та четвертий вхід антени 1 підключені одинакові технічні параметри. Приймачі 4, 11, 12 до третього виходу формувача керуючих сигналів забезпечують підсилення прийнятих та перенесе8, а згаданий третій вхід антени 1 з'єднаний із трених в базовий діапазон S радіохвиль, розфільтротіми входами антени компенсації бокового випровку їх на звужені смуги частот, формування і підмінювання 9 та антени компенсації фонового висилення відеосигналів. Приймачі побудовані по промінювання 10. схемі прямого підсилення, що забезпечує широку Антена 1 містить антенне дзеркало 15, редукполосу радіохвиль що одночасно приймаються. тор 16, датчик кута 17, перший обертовий пристрій На Фіг.5 приведена блок - схема приймача 4 18, другий обертовий пристрій 19, опромінювачі який містить, НВЧ підсилювач 39, подільник потудіапазонів радіохвиль L, S, С, X, відповідно 20, 21, жності 40, смугопропускаючі фільтри (СПФ) 4122, 23 і вхідні пристрої 24, що містять вхідні надви1...41-N і детектори-підсилювачі 42-1...42-N при сокочастотні (НВЧ) підсилювачі діапазонів L, S, С, цьому, вхід НВЧ підсилювача 39 є входом приймаX, відповідно 25, 26, 27, 28, перетворювачі частоти ча 4, вихід НВЧ підсилювача 39 через N виходів діапазонів L, С, Х, відповідно 29, 30, 31 і НВЧ пеподільника потужності 40, з'єднаний з входами ремикач 32 при цьому, вхід редуктора 16 є першим (СПФ) 41-1...41-N, виходи яких в свою чергу підвходом антени 1 а вихід з'єднаний з антенним ключені до входів де текторів-підсилювачів 42дзеркалом 15 і датчиком кута 17 другий вхід і вихід 1...42-N виходи яких є ви ходом приймача 4. якого, підключені через перший обертовий приОсобливістю побудови пасивної радіолокаційстрій 18, є відповідно другим входом і першим виної станції що пропонується є те, що частина апаходом антени 1, опромінювач діапазону радіоратури яка традиційно входить в приймачі, а саме хвиль L20, через вхідний НВЧ підсилювач - вхідні пристрої, конструктивно винесена якомога 11 78129 12 ближче до антенних пристроїв - опромінювачів видимості, яка для повітряних носіїв може станоантени 1 та компенсаційних антен 9, 10. Така її вити 100км і більше, пасивна станція буде приймапобудова забезпечує низький рівень некорисних ти сигнали не тільки основного пелюстка діаграми витрат прийнятих сигналів ВО, прийом сигналів спрямованості антени ВО, а і сигнали її бокових та ВО малої потужності чи з далекої відстані. фонових пелюстків. При цьому кількість прийнятих Блоки вхідних пристроїв та приймачів побудосигналів ВО при зменшенні відстані різко збільшувані на сучасних твердотільних малогабаритних ється, що є др угою відзнакою повітряного ВО. НВЧ елементах діапазонів L, S, С, X, що виготовБлок аналізу 14, див. Фіг.7, містить перший ляються світовими виробниками, такими як, ключ 52, другий ключ 53, К перших оперативно AWANTEK, HEWLETT PACKARD, M|A СОМ, ANAзапам'ятовуючи х пристроїв (ОЗП1) 54, К других LOG DEVICES. ОЗП (ОЗП2) 55, перший пороговий суматор 56, Блок порівняння 13, див. Фіг.6, містить N схем другий пороговий суматор 57, а також схему рівнокожна із яких містить перший 43, другий 44 та трезначності 58 при цьому, вихід першого ключа 52 тій 45 компаратори, схему рівнозначності 46, датпідключений до входу послідовно з'єднаних перчик порогу визначення 47, формувач коротких імших ОЗП1 54, вихід другого ключа 53 підключений пульсів 48, формувач імпульсів 49, схему до входу послідовно з'єднаних других ОЗП2 55, сумісності 50 і тригер 51 при цьому, перші входи другі ви ходи першого і N-ого ОЗП1 54 підключені компараторів 43, 44, 45 є першим входом блока до входів першого порогового суматора 56, другі порівняння 13, другі входи другого 44, та третього виходи першого і К-ого ОЗП2 55 підключені до 45 компараторів є відповідно, другим та третім входів др угого порогового суматора 57, перший входами блока порівняння 13, другий вхід третього вхід першого ключа 52 є першим входом блока компаратора 45 з'єднаний з виходом датчика поаналізу 14, перший вхід другого ключа 53 є другим рогу визначення 47, виходи першого 43 та другого входом блока аналізу 14, виходи першого 56, та 44 компараторів через схему рівнозначності 46, другого 57 порогових суматорів через схему рівноформувач коротких імпульсів 48 і перший вхід значності 58 з'єднані з виходом блока аналізу 14 а схеми сумісності 50 підключені до С-входу тригера паралельно з'єднані другі входи першого 52, та 51, до якого, через другий вхід схеми сумісності 50 другого 53 ключів, К ОЗП1 54 і К ОЗП2 55 є третім і формувач імпульсів 49 підключений також вихід входом блока аналізу 14. третього компаратора 45, R-вхід тригера 51 підПрацює блок аналізу 14 наступним чином. На ключений до згаданого виходу третього компарапершому скануванні простору антеною 1, під час тора 45. проходу основним пелюстком її діаграми спрямоОсобливістю блока порівняння 13 є те, що ріваності напрямку на ВО блок визначення кутових шення про прийом сигналу основним, боковим чи координат 5 формує строб, ширина якого пропорфоновим пелюстком діаграми спрямованості анційна швидкості сканування і ширині основного тени 1 приймається на короткому проміжку часу пелюстка. Строб поступає на третій вхід блока (приблизно 1мкс.), що формується формувачем аналізу 14, відкриває ключі 52, 53 і забезпечує коротких імпульсів 41 при перевищенні сигналу в запис в перший із К ОЗП1 54 і перший із К ОЗП2 55 боковому чи фоновому каналі. Після того як було коду пеленга ВО (Пі-1) і коду кількості імпульсів винесено рішення про прийом основним пелюст(Мі-1), що були прийняті від даного ВО в стробі. ком, сигнал завади, чи сигнал другого мішаючого Строб, сформований на другому скануванні просвипромінюючого об'єкта прийнятий антеною комтору антеною 1, перенесе код пеленгу і код кількопенсації бокового випромінювання 9, чи антеною сті імпульсів першого сканування в другий із К компенсації фонового випромінювання 10, навіть ОЗП1 54 і другий із К ОЗП2 55, а на їх місця запиякщо їх амплітуда і перевищить в даний час амплішуться значення пеленгу та кількості імпульсів ВО туду корисного сигналу що приймається в даний другого сканування. По закінченні К-го сканування момент часу основним пелюстком, не зможуть будуть заповнені всі К ОЗП1 54 і всі К ОЗП2 55. заборонити прохід корисного сигналу до закінченКоди пеленгів із першого і К-ого ОЗП1 54 поступня його дії. лять на перший пороговий суматор 56, а коди кільДатчик порогу визначення 47 задає поріг викості імпульсів із першого і К-ого ОЗП2 55 поступзначення корисних сигналів. лять на другий пороговий суматор 57. Як тільки Тригер 51 формує сигнал стандартної амплірізниця кодів пеленгів чи різниця кодів імпульсів туди на час дії корисного сигналу. перевершить задані порогові величини, порогові Така побудова блока порівняння 13 підвищує суматори 56, 57 сформують признак - повітряний працездатність станції в умовах дії завад а також ВО і через схему рівнозначності 58 видадуть його насиченого електромагнітного полю. на пристрій індикації 6. Блок аналізу 14 забезпечує виявлення ВО Робота пасивної радіолокаційної станції відбурозміщених на повітряних носіях. Відзнакою паравається таким чином. Формувач керуючих сигналів метрів сигналів прийнятих від повітряних носіїв, є 8 ведучої пасивної станції видає в антени 1, 9, 10 велика швидкість зміни їх пеленгу, коли вони рута блок визначення кутови х координат 5 команду хаються курсами близькими до паралельних курсу робочого діапазону частот, що забезпечує вибір носія пасивної станції. Коли повітряні носії ВО рупотрібного каналу опромінювач - вхідний НВЧ підхаються курсом на, чи курсом від носія пасивної силювач - перетворювач частоти в антені 1, вибір станції, швидкість зміни їх пеленгів невизначена, потрібних каналів - антена компенсації - вхідний але в цьому випадку буде використано критерій НВЧ підсилювач - перетворювач частоти в антешвидкості зміни кількості сигналів, що прийняті від нах 9, 10 та вибір ширини стробу в блоці визнаВО. Пояснюється це тим, що на відстані прямої чення кутови х координат 5. Антена 1, антена ком 13 78129 14 пенсації бокового випромінювання 9 та антена скануваннях антени 1 (на вибраному проміжку чакомпенсації фонового випромінювання 10, розмісу, наприклад 5...10 хвилин), формує рішення - на щені на одній платформі, синхронно сканують якому носії, надводному чи повітряному, установпростір. Прийняті, підсилені і перенесені в полосу лено даний ВО. Признак носія з блоку аналізу 14 частот діапазону S сигнали ВО, проходять через поступає на пристрій індикації 6. приймачі 5, 11, 12, де розфільтровуються на звуОдночасно пеленг ВО надходить на перший жені полоси, перетворюються в відеосигнали і блок обчислення відстані 7, котрий використовуюпоступають на блок порівняння 13. Блок порівнянчи пеленг того ж ВО отриманий від веденої пасивня 13, аналізуючи співвідношення амплітуд сигнаної станції та базу між носіями, триангуляційним лів, формує рішення з якого напрямку прийнято методом знаходить дальність до ВО. сигнал - з напрямку основного, чи з напрямку боПасивна радіолокаційна станція, що заявлякових або фонових пелюстків діаграми спрямовається має технічні переваги над найближчим ананості антени 1. Якщо сигнал прийнято з напрямку логом, а саме: основного пелюстка, його амплітуда буде найбістанція забезпечує однозначність визначення льшою із трьох і блок порівняння 13 видасть на координат рухомих носіїв випромінюючих об'єктів блок визначення кутових координат 5 імпульс став умовах прийому їх сигналів боковими чи фонондартної амплітуди і довжиною рівною довжині вими пелюстками діаграми спрямованості антени (в тому числі в умовах дії завад чи насиченого прийнятого радіосигналу ВО (від 1 до n´100мкс). електромагнітного поля), за рахунок використання Кожному імпульсу, що пройшов на блок визначенапаратури компенсації (виключення з обробки) ня кутових координат 5, приписується код пеленгу сигналів, прийнятих боковими чи фоновими пелюантени 1. Прийом, підрахунок імпульсів і визнастками діаграми спрямованості антени; чення середнього значення пеленгу ВО виконується блоком визначення кутових координат 5 в стростанція забезпечує визначення рухомих випромінюючих об'єктів розміщених на повітряних бі, ширина якого пропорційна ширині основного носіях за рахунок аналізу швидкості зміни пеленгу, пелюстка діаграми спрямованості антени 1 в даабо кількості прийнятих сигналів. ному вибраному діапазоні частот і швидкості скаУ НДІ "Квант-Радіолокація" розроблена технінування простору. Середнє за одне сканування антени 1 значення пеленгу ВО поступає на блок чна та конструкторська документація, а також виготовлені діючі макети деяких пристроїв пасивної аналізу 14, перший блок обчислення відстані 7, радіолокаційної станції. Відпрацювання технічних пристрій індикації 6. На блок аналізу 14 поступарішень на макетах підтверджують технічні перевають також строб та код кількості імпульсів прийняги заявленої пасивної радіолокаційної станції над тих від даного ВО за одне просторове сканування. Блок аналізу 14, аналізуючи швидкість зміни пеленайближчим аналогом. нгу та кількості імпульсів ВО на К просторових 15 Комп’ютерна в ерстка Т.Чепелева 78129 Підписне 16 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPassive radar station for determining coordinates of above-water and air carriers of radiating objects
Автори англійськоюAndrusenko Mykola Ivanovych, Bilanovskyi Mykhailo Mykolaiovych, Віlусhеnко Ivan Fеdоrоvусh, Yena Hryhorii Оlекsаndrоvусh, Lipatov Valerii Pavlovych, Tolstykhin Mykola Viktorovych, Shovhun Vitalii Andriiovych
Назва патенту російськоюПассивная радиолокационная станция для определения координат носителей надводных и воздушных излучающих объектов
Автори російськоюАндрусенко Николай Иванович, Билановский Михаил Николаевич, Биличенко Иван Федорович, Ена Григорий Александрович, Липатов Валерий Павлович, Толстихин Николай Викторович, Шовгун Виталий Андреевич
МПК / Мітки
Мітки: надводних, радіолокаційна, пасивна, станція, носіїв, повітряних, випромінюючих, координат, об'єктів, вимірювання
Код посилання
<a href="https://ua.patents.su/8-78129-pasivna-radiolokacijjna-stanciya-vimiryuvannya-koordinat-nosiv-nadvodnikh-ta-povitryanikh-viprominyuyuchikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів</a>
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Андрусенко Микола Іванович, Толстіхін Микола Вікторович, Ліпатов Валерій Павлович, Білановський Михайло Миколайович, Шовгун Віталій Андрійович, Біличенко Іван Федорович, Єна Григорій Олександрович
Мітки: вимірювання, надводних, пасивна, повітряних, радіолокаційна, випромінюючих, об'єктів, координат, носіїв, станція
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 37949
Опубліковано: 15.05.2001
Автор: Черниш Станіслав Костянтинович
Мітки: джерел, випромінювання, пасивна, станція, вимірювання, координат
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання містить в собі пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ), блок обробки пеленгів оберненого галсу (БОПОГ), блок визначення швидкості зміни пеленга (БВШЗП) і блок визначення дальності, які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднаний з входами БОППГ і БОПОГ, перший вихід якого е першим виходом пасивної станції, перший...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52633
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: джерел, вимірювання, координат, пасивна, станція, випромінювання
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднані відповідно з входом БОППГ і входом БОПОГ, вихід останнього є першим виходом станції, яка відрізняється тим, що у неї додатково введені блок визначення швидкості зміни...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: пасивна, випромінювання, вимірювання, джерел, координат, станція
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 77866
Опубліковано: 15.01.2007
Автори: Черниш Станіслав Костянтинович, Єна Григорій Олександрович
Мітки: вимірювання, станція, випромінювання, пасивна, координат, джерел
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галса (БОППГ), блок обробки пеленгів оберненого галса (БОПОГ), блок визначення швидкості зміни пеленга (БВШЗП) і блок визначення дальності (БВД), які розміщені на рухомому носієві, причому пеленгаторна станція, БОППГ, БВШЗП і БВД з'єднані послідовно, другий вихід пеленгаторної станції з'єднаний з входом БОПОГ, вихід...
Попередній патент: Протипінна суміш для харчового виробництва
Наступний патент: Спосіб діагностики рецидивів у хворих на рак товстої кишки
Випадковий патент: Твердопаливний водогрійний котел