Пасивно-активна радіолокаційна система
Номер патенту: 78931
Опубліковано: 25.04.2007
Автори: Ліпатов Валерій Павлович, Білановський Михайло Миколайович, Толстіхін Микола Вікторович, Хоменко Микола Васильович, Єна Григорій Олександрович, Шовгун Віталій Андрійович, Андрусенко Микола Іванович, Гузь Володимир Іванович, Біличенко Іван Іванович, Білокоз Сергій Сергійович, Бутирін Анатолій Вікторович

Формула / Реферат
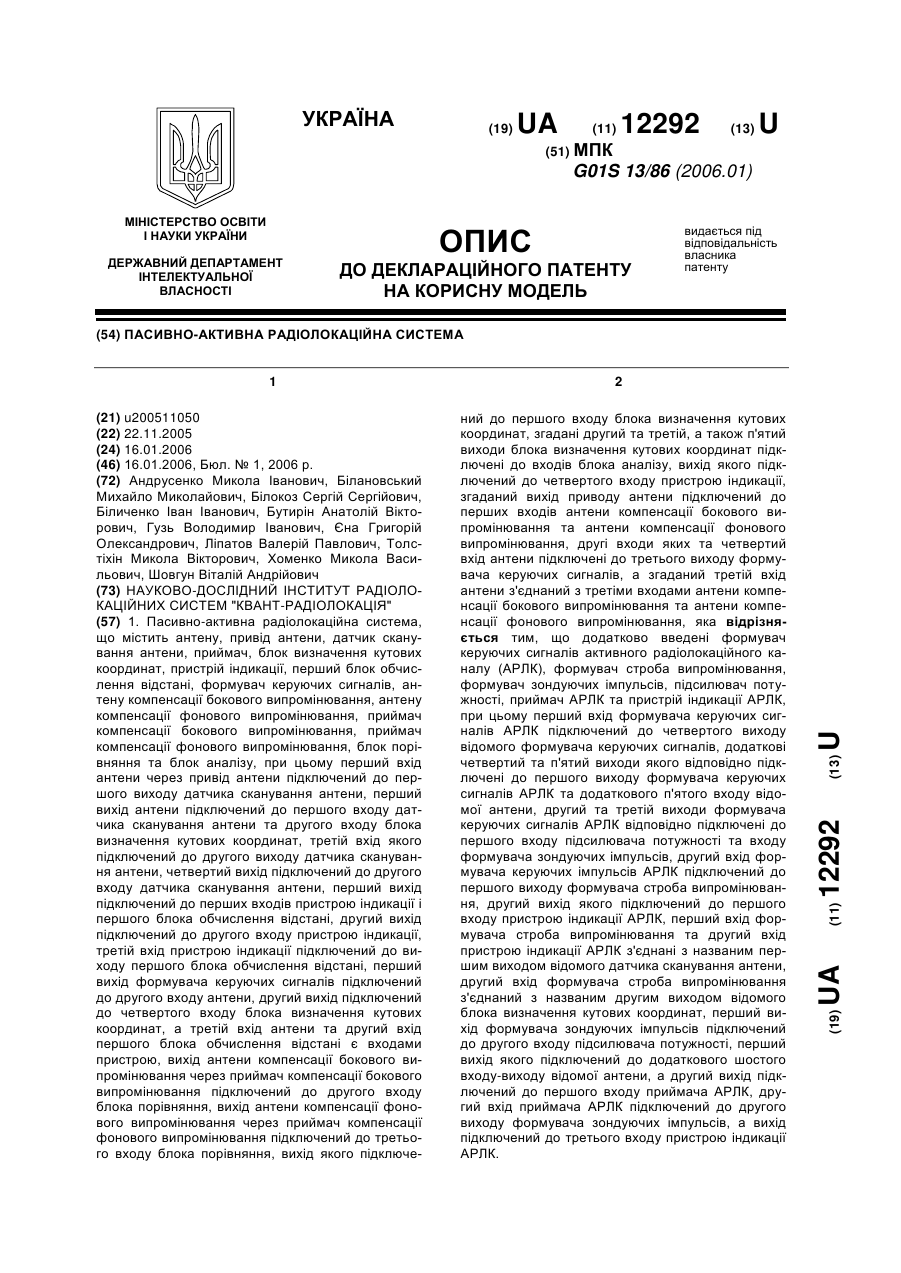
1. Пасивно-активна радіолокаційна система, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, яка відрізняється тим, що додатково введені формувач керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач строба випромінювання, формувач зондувальних імпульсів, підсилювач потужності, приймач АРЛК та пристрій індикації АРЛК, при цьому перший вхід формувача керуючих сигналів АРЛК підключений до четвертого виходу відомого формувача керуючих сигналів, додаткові четвертий та п'ятий виходи якого відповідно підключені до першого виходу формувача керуючих сигналів АРЛК та додаткового п'ятого входу відомої антени, другий та третій виходи формувача керуючих сигналів АРЛК відповідно підключені до першого входу підсилювача потужності та входу формувача зондувальних імпульсів, другий вхід формувача керуючих імпульсів АРЛК підключений до першого виходу формувача строба випромінювання, другий вихід якого підключений до першого входу пристрою індикації АРЛК, перший вхід формувача строба випромінювання та другий вхід пристрою індикації АРЛК з'єднані з названим першим виходом відомого датчика сканування антени, другий вхід формувача строба випромінювання з'єднаний з названим другим виходом відомого блока визначення кутових координат, перший вихід формувача зондувальних імпульсів підключений до другого входу підсилювача потужності, перший вихід якого підключений до додаткового шостого входу-виходу відомої антени, а другий вихід підключений до першого входу приймача АРЛК, другий вхід приймача АРЛК підключений до другого виходу формувача зондувальних імпульсів, а вихід підключений до третього входу пристрою індикації АРЛК.
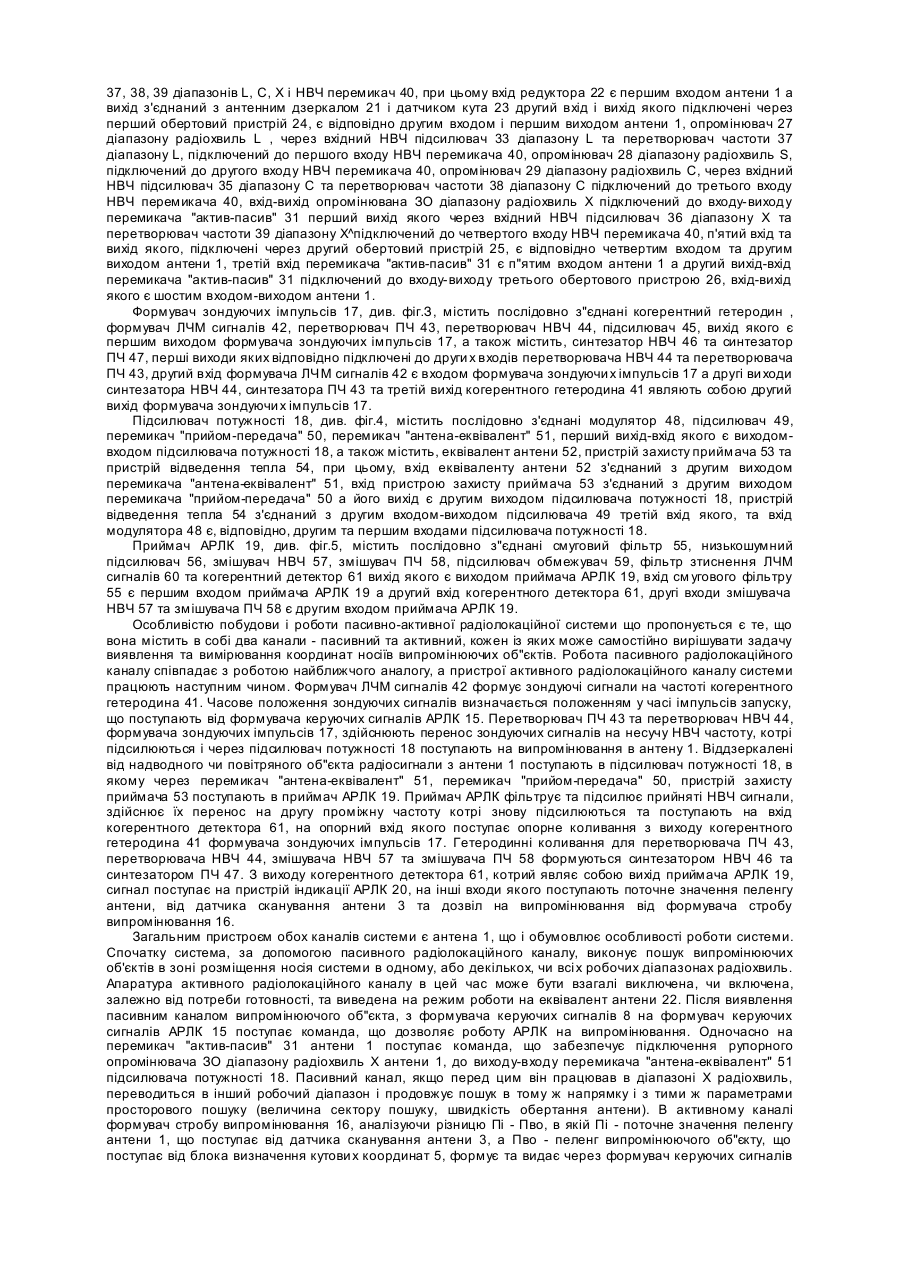
2. Пасивно-активна радіолокаційна система за п. 1, яка відрізняється тим, що антена містить антенне дзеркало, редуктор, датчик кута, перший обертовий пристрій, другий обертовий пристрій, третій обертовий пристрій, опромінювачі діапазонів радіохвиль L, S, С, X, перемикач "актив-пасив" і вхідні пристрої, що містять вхідні надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, перетворювачі частоти діапазонів L, С, Х і НВЧ-перемикач, при цьому вхід редуктора є першим входом антени, а вихід з'єднаний з антенним дзеркалом і датчиком кута, другий вхід і вихід якого, підключені через перший обертовий пристрій, є відповідно другим входом і першим виходом антени, опромінювач діапазону радіохвиль L через вхідний НВЧ-підсилювач діапазону L та перетворювач частоти діапазону L підключений до першого входу НВЧ-перемикача, опромінювач діапазону радіохвиль S підключений до другого входу НВЧ-перемикача, опромінювач діапазону радіохвиль С через вхідний НВЧ-підсилювач діапазону С та перетворювач частоти діапазону С підключений до третього входу НВЧ-перемикача, вхід-вихід опромінювача діапазону радіохвиль Х підключений до входу-виходу перемикача "актив-пасив", перший вихід якого через вхідний НВЧ-підсилювач діапазону Х та перетворювач частоти діапазону X підключений до четвертого входу НВЧ-перемикача, п'ятий вхід та вихід якого, підключені через другий обертовий пристрій, є відповідно четвертим входом та другим виходом антени, третій вхід перемикача "актив-пасив" є п'ятим входом антени, а другий вихід-вхід перемикача "актив-пасив" підключений до входу-виходу третього обертового пристрою, вхід-вихід якого є шостим входом-виходом антени.
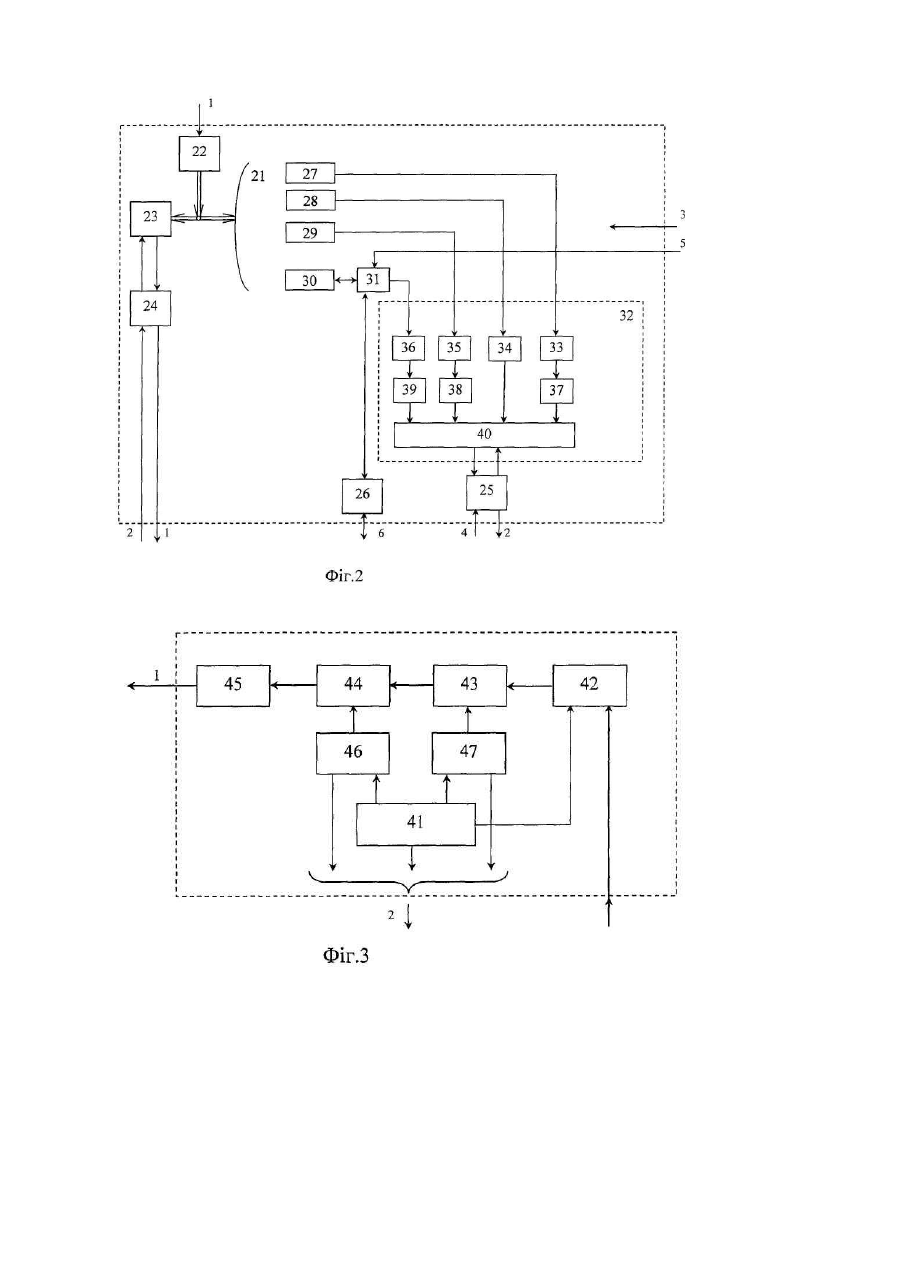
3. Пасивно-активна радіолокаційна система за п. 1, яка відрізняється тим, що формувач зондувальних імпульсів містить послідовно з'єднані когерентний гетеродин, формувач лінійно частотно модульованих (ЛЧМ) сигналів, перетворювач проміжної частоти (ПЧ), перетворювач НВЧ, підсилювач, вихід якого є першим виходом формувача зондувальних імпульсів, а також містить синтезатор НВЧ та синтезатор ПЧ, перші виходи яких відповідно підключені до других входів перетворювача НВЧ та перетворювача ПЧ, при цьому другий вхід формувача ЛЧМ-сигналів є входом формувача зондувальних імпульсів, а другі виходи синтезатора НВЧ і синтезатора ПЧ та третій вихід когерентного гетеродина являють собою другий вихід формувача зондувальних імпульсів.
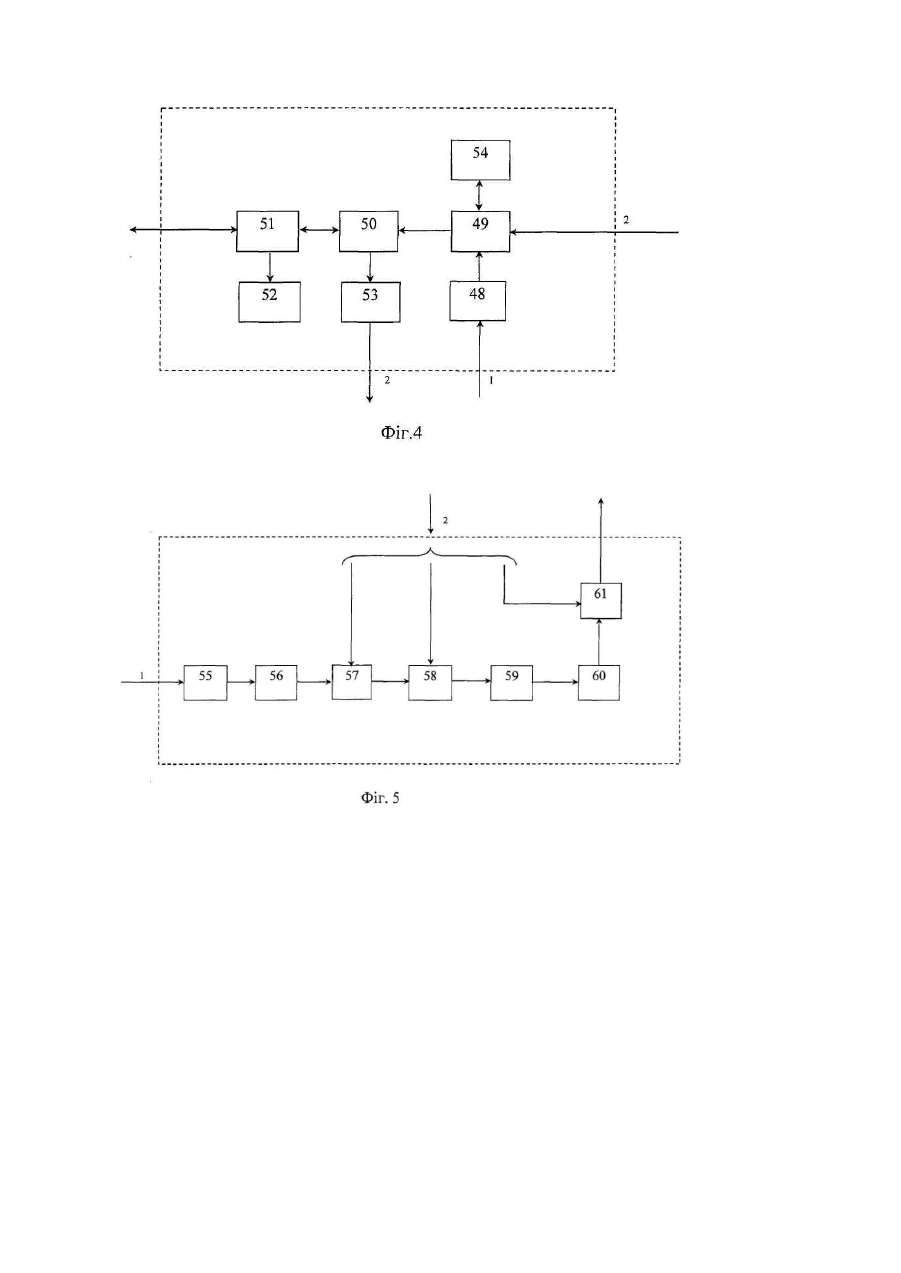
4. Пасивно-активна радіолокаційна система за п. 1, яка відрізняється тим, що підсилювач потужності містить послідовно з'єднані модулятор, підсилювач, перемикач "прийом-передача", перемикач "антена-еквівалент", перший вихід-вхід якого є виходом-входом підсилювача потужності, а також містить еквівалент антени, пристрій захисту приймача та пристрій відведення тепла, при цьому вхід еквівалента антени з'єднаний з другим виходом перемикача "антена-еквівалент", вхід пристрою захисту приймача з'єднаний з другим виходом перемикача "прийом-передача", а його вихід є другим виходом підсилювача потужності, пристрій відведення тепла з'єднаний з другим входом-виходом підсилювача, третій вхід якого та вхід модулятора є відповідно другим та першим входами підсилювача потужності.
5. Пасивно-активна радіолокаційна система за п. 1, яка відрізняється тим, що приймач АРЛК містить послідовно з'єднані смуговий фільтр, низькошумний підсилювач, змішувач НВЧ, змішувач ПЧ, підсилювач-обмежувач, фільтр стиснення ЛЧМ сигналів та когерентний детектор, вихід якого є виходом приймача АРЛК, при цьому вхід смугового фільтра є першим входом приймача АРЛК, а другий вхід когерентного детектора та другі входи змішувача НВЧ та змішувача ПЧ є другим входом приймача АРЛК.
Текст
Винахід належить до області радіолокації, а саме, до пристроїв, що забезпечують раннє виявлення, вимірювання координат та параметрів руху надводних та повітряних об'єктів на основі: - прийому та обробки сигналів, випромінюваних їх штатними радіотехнічними системами (засоби пасивної радіолокації); - випромінювання зондуючих сигналів, прийому та обробки відбитих від цілі сигналів (засоби активної радіолокації). Принцип дії запропонованої пасивно-активної радіолокаційної системи базується на отриманні даних від різнорідних джерел (активних та пасивних) інформації, їх об'єднаному аналізі та сумісній обробці. Технічні рішення, реалізовані в запропонованій пасивно-активній системі, можуть бути використані в цілях вирішення задач моніторингу, радіонавігації та безпеки руху надводних та повітряних об'єктів. Розглянемо окремо недоліки пасивних та активних пристроїв виявлення та вимірювання координат. Відомо, що для визначення координат (пеленг, дальність) місцезнаходження рухомого носія випромінюючого об'єкта (ВО) з використанням пасивних радіолокаційних пристроїв потрібно виконати вимірювання кутових напрямків (пеленгів на випромінюючий об'єкт) з рознесених у просторі на деяку відстань (базу) точок. У простішому випадку, при одночасному багаторазовому вимірюванні пеленга з двох точок, статистичній обробці цих пеленгів, місцезнаходження носія ВО визначається триангуляційним способом як точка перетину двох виміряних з цих точок ліній пеленгів ("Теоретические основы радиолокации" под ред. Ширмана, М, "Сов. радио", 1970). Координати місцезнаходження ВО можуть визначатись також і одним пасивним пристроєм розміщеним на рухомому носії, при цьому формування бази відбувається за рахунок руху носія пасивного пристрою (А.Г. Николаев, С.В. Перцов "Радиотеплолокация", М., "Сов. радио", 1964). Для компенсації переміщення носія ВО носій пасивного пристрою виконує прямий та зворотний галси курсом, близьким до перпендикулярного відносно пеленгу ВО і з постійною швидкістю. На прямому галсі пасивний пристрій виконує поточне багаторазове вимірювання і статистичну обробку пеленгів ВО. По результатам статистичної обробки пеленгів прямого галсу на зворотному галсі проводиться екстраполяція пеленгу ВО за умови, що носій пристрою продовжує рухатись в напрямку прямого галсу. На зворотному галсі носія пасивний пристрій також виконує багаторазове вимірювання пеленгів ВО та їх статистичну обробку. По обробленому пеленгу зворотного галсу і екстрапольованому, з ура хуванням величини бази пройденої носієм на зворотному галсі, пеленгу уявного прямого галсу, триангуляційним методом знаходиться дальність до ВО. Такий метод реалізований в пасивній станції відповідно [патенту UA №52633 G01S5/01, публ. 15.012003р.]. Потреба багаторазових вимірів пеленгів, в тому числі при виконанні прямого та зворотного галсів, обумовлює затрати часу на визначення координат, котрі, в залежності від режиму вимірювання координат пасивним пристроєм, можуть досягати 5...10 і більше хвилин. Позитивною характеристикою пасивних радіолокаційних пристроїв є те, що вони забезпечують виявлення та вимірювання координат носіїв випромінюючих об"єктів як в зоні прямої видимості, так і за її межами, що дає їм перевагу по дальності дії в порівнянні з активними радіолокаційними пристроями. Окрім цього, вимірювання координат виконується ними в режимі повного радіомовчання, що забезпечує їх малопомітність і не сприяє упередженому виявленню системами радіоелектронного моніторингу. До недоліків пасивних пристроїв слід віднести значний час (від 3...5 хв. до 10...20 хв.) вимірювання дальності до випромінюючого об"єкта, що обумовлено необхідністю отримання значної кількості відліків пеленгів і формування бази (при використанні одного рухомого носія пасивного радіолокаційного пристрою). Активні радіолокаційні пристрої визначають дальність до об"єктів за рахунок вимірювання проміжку часу між випромінюванням зондуючого радіосигналу і прийомом віддзеркаленого від об"єкта радіосигналу. Водночас, менша, в порівнянні з пасивними пристроями дальність дії, та помітність через необхідність випромінювання потужних зондуючих сигналів є суттєвими недоліками активних радіолокаційних пристроїв. Перевагою активних радіолокаційних пристроїв є значно менші, в порівнянні з пасивними пристроями, похибки та час вимірювання координат. Відомий засіб і пристрій для огляду поверхні та повітряного простору [патент US № 4 780 719] в якому задана зона огляду пасивно сканується по азимуту і куту місця пасивним пристроєм виявлення, працюючим в інфрачервоному діапазоні хвиль. Пасивне виявлення цілей, що знаходяться в межах зони, відбувається періодично із заданим циклом. В кожному циклі сканування пасивний пристрій формує інформацію для відповідних кутів азимута та кутів місця, яка поступає на пристрій фільтрації. В пристрої фільтрації відокремлюється інформація, що відноситься до передбачуваних цілей. З пасивним пристроєм виявлення зв"язаний радіолокаційний пристрій виявлення, що випромінює в тому азимутальному напрямку, в якому інфрачервоним пристроєм виявлена передбачувана ціль. Приймач радіолокаційного пристрою приймає відбиті від цілі сигнали та виробляє відповідну інформацію для даного азимутального кута. Ін формація радіолокаційного та інфрачервоного пристроїв, що відноситься до одного і того ж самого азимутального кута, коррелюється для розпізнавання істинних та хибних (помилкових) цілей та запам"ятовування даних про азимутальний кут та кут місця хибних цілей. Недоліками даного пристрою є однодіапазонність та мала дальність дії, які визначаються характеристиками пасивного інфрачервоного пристрою виявлення джерел випромінювання цього діапазону. Відома радіолокаційна система, що установлена на борту літального апарата. Система містить оглядову РЛС та приймач попередження про радіолокаційне опромінювання. В додатковий приймальний тракт подають сигнали чужої РЛС, прийняті гостро спрямованою приймально-передаючою антеною оглядової РЛС. Вихід цього каналу підключений до названого приймача, за рахунок чого отримують більшу роздільну здібність по куту та значно збільшують дальність дії системи. Це, в свою чергу, дозволяє своєчасно та більш точно оцінити загрозливі ситуації. Для створення додаткового каналу не потрібні великі затрати, так як він має просту конструкцію та може бути побудований на присутніх в системі функціональних вузлах. Дане технічне рішення має недостатні функціональні можливості, які визначаються відносно вузькою смугою робочих частот антени оглядової РЛС, що використовується апаратурою попередження про радіолокаційне опромінення, а також значні похибки вимірювання кутови х координат випромінюючих об"єктів через відсутність апаратури компенсації прийому їх сигналів боковими пелюстками антени оглядової РЛС. Загальним недоліком обох вищенаведених систем є те, що їх пасивні пристрої не забезпечують вимірювання дальності ними визначених об'єктів. Загальним недоліком активних радіолокаційних пристроїв, працюючих в УКХ діапазоні радіохвиль, як приведених аналогів так і взагалі є те, що їх дальність дії обмежена радіогоризонтом, і лише в умовах надрефракції може сягати величини дальностей, що перевищують радіогоризонт. Окрім цього, недоліком при використанні активних радіолокаційних пристроїв в режимі безперервного огляду простору в межах азимутальних кутів 0-360° є, також, демаскуючий фактор, що дає можливість виявлення їх випромінювання на дальностях, які суттєво перевищують радіогоризонт. Найбільш близька по технічній суті і досяжному технічному результату є пасивна радіолокаційна станція визначення координат носіїв надводних та повітряних випромінюючих об"єктів [патент UA № 8961] що містить'антену, привід антени, датчик сканування антени, приймач, блок визначення кутови х координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутови х координат* Згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання. Найближчий аналог працює таким чином. Широкосмугова, багатодіапазонна антена ведучого пасивного пристрою, розміщеного на одному, наприклад ведучому, носії сканує простір та знаходить пеленг на ВО. Пеленг на той же ВО знаходить також і антена веденого пасивного пристрою, розміщеного на другому носії. Ведучий та ведений пасивні пристрої обмінюються між собою інформацією, котра, крім пеленгів ВО, містить дальність, тобто базу між носіями. По відомим двом пеленгам ВО і величині бази між ними в першому блоці обчислення відстані триангуляційним методом знаходиться дальність до ВО. Наявність у найближчого аналога антен та приймачів компенсації бокового та фонового випромінювання забезпечують однозначність визначення ним координат носіїв ВО. Дальність дії найближчого аналогу, залежно від діапазону радіохвиль в якому працює ВО надводного носія, в 3...10 і більше разів може перевищувати дальність радіогоризонту але, взаємний пошук, ідентифікація, потреба багаторазового вимірювання пеленгу та обмін інформацією між двома носіями пасивних пристроїв, що вирішують триангуляційну задачу відносно одного і того ж самого ВО (незалежно від дальності ВО) після першого визначення його пеленгу, досягає декількох хвилин. Очевидно, що при вирішенні задачі вимірювання координат носіїв ВО, розташованих на відстані, що в декілька разів перевищує радіогоризонт, використанню названого пасивного пристрою не має альтернативи. Крім того, використання пасивного пристрою, в такому випадку, не призводить до передчасного виявлення носія пасивного пристрою. В процесі спостереження за випромінюючим об"єктом забезпечується його супроводження по кутовій координаті та дальності в режимі радіомовчання. Дана властивість пасивних пристроїв може бути використана при супроводженні повітряних об’єктів, наприклад літаків цивільної авіації, за межами дій активних радіолокаційних пристроїв, радіомоніторингу простору, навігації. Але, в умовах, коли носій ВО розташований в межах прямої видимості, чи в умовах надрефракції, коли дальність дії активного пристрою збільшується а прихованість його роботи не є актуальною, використання пасивного пристрою не завжди виправдано, так як призводить до значно більших затрат часу. Це є недоліком найближчого аналогу. В основу винаходу поставлена задача створити комплексну пасивно-активну радіолокаційну систему яка б на дальностях прямої радіовидимості і за її межами забезпечувала: - виявлення та вимірювання координат носіїв надводних та повітряних, випромінюючих в широкому діапазоні частот, об"єктів пасивним радіолокаційним пристроєм; - зменшення часу вимірювання координат носіїв ВО, за рахунок короткочасного включення активного радіолокаційного пристрою в напрямках, що попередньо визначені пасивним радіолокаційним пристроєм. Поставлена задача вирішується тим, що в пасивну радіолокаційну станцію вимірювання координат носіїв надводних та повітряних випромінюючих об"єктів, яка містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого ви ходу датчика сканування антени, четвертий вихід підключений до другого входу да тчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких, та четвертий вхід антени, підключені до третього виходу формувача керуючи х сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, згідно винаходу додатково введено формувач керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач стробу випромінювання, формувач зондуючи х імпульсів, підсилювач потужності, приймач АРЛК та пристрій індикації АРЛК при цьому, перший вхід формувача керуючих сигналів АРЛК підключений до четвертого виходу відомого формувача керуючих сигналів, додаткові четвертий та п’ятий виходи якого, відповідно підключені до першого виходу формувача керуючих сигналів АРЛК та додаткового п"ятого входу відомої антени, другий та третій виходи формувача керуючих сигналів АРЛК відповідно підключені до першого входу підсилювача потужності та входу формувача зондуючи х імпульсів, другий вхід формувача керуючих імпульсів АРЛК підключений до першого виходу формувача стробу випромінювання,, другий вихід якого підключений до першого входу пристрою індикації АРЛК, перший вхід формувача стробу випромінювання та другий вхід пристрою індикації АРЛК з "єднані з названим першим виходом відомого датчика сканування антени, другий вхід формувача стробу випромінювання з'єднаний з названим другим виходом відомого блока визначення кутови х координат, перший вихід формувача зондуючих імпульсів підключений до другого входу підсилювача потужності. перший вихід якого підключений до додаткового шостого входу-виходу відомої антени а другий вихід підключений до першого входу приймача АРЛК, др угий вхід приймача АРЛК підключений до другого виходу формувача зондуючи х імпульсів, а вихід підключений до третього входу пристрою індикації АРЛК. Крім того, в пасивно-активній радіолокаційній системі, згідно винаходу, антена містить антенне дзеркало, редуктор, датчик кута, перший обертовий пристрій, другий обертовий пристрій, третій обертовий пристрій, опромінювачі діапазонів радіохвиль L, S, С, X, перемикач "актив-пасив" і вхідні пристрої, що містять, вхідні надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, перетворювачі частоти діапазонів L, С, X і НВЧ перемикач, при цьому, вхід редуктора є першим входом антени а вихід з'єднаний з антенним дзеркалом і датчиком кута другий вхід і вихід якого, підключені через перший обертовий пристрій, є відповідно другим входом і першим виходом антени, опромінювач діапазону радіохвиль L, через вхідний НВЧ підсилювач діапазону L та перетворювач частоти діапазону L, підключений до першого входу НВЧ перемикача, опромінювач діапазону радіохвиль S, підключений до другого входу НВЧ перемикача, опромінювач діапазону радіохвиль С, через вхідний НВЧ підсилювач діапазону С та перетворювач частоти діапазону С, підключений до третього входу НВЧ перемикача, вхід-ви хід опромінювача діапазону радіохвиль X підключений до входу-ви ходу перемикача "актив-пасив" перший вихід якого через вхідний НВЧ підсилювач діапазону X та перетворювач частоти діапазону X, підключений до четвертого входу НВЧ перемикача, п'ятий вхід та вихід якого підключені через другий обертовий пристрій, є відповідно четвертим входом та другим ви ходом антени, третій вхід перемикача "актив-пасив" є п"ятим входом антени а другий вихід-вхід перемикача "актив-пасив" підключений до входу-виходу третього обертового пристрою, вхідвихід якого є шостим входом-виходом антени. Крім того, в пасивно-активній радіолокаційній системі, згідно винаходу, формувач зондуючи х імпульсів містить послідовно з"єднані когерентний гетеродин, формувач лінійно частотно модульованих (ЛЧМ) сигналів, перетворювач проміжної частоти (ПЧ), перетворювач НВЧ, підсилювач, вихід якого є першим виходом формувача зондуючих імпульсів, а також містить, синтезатор НВЧ та синтезатор ПЧ, перші виходи яких відповідно підключені до других входів перетворювача НВЧ та перетворювача ПЧ, другий вхід формувача ЛЧМ сигналів є входом формувача зондуючи х імпульсів а другі ви ходи синтезатора НВЧ, синтезатора ПЧ та третій вихід когерентного гетеродина являють собою другий вихід формувача зондуючих імпульсів. Крім того, в пасивно-активній радіолокаційній системі, згідно винаходу, підсилювач потужності містить послідовно з’єднані модулятор, підсилювач, перемикач "прийом-передача", перемикач "антена-еквівалент", перший вихід-вхід якого є виходом-входом підсилювача потужності, а також містить еквівалент антени, пристрій захисту приймача та пристрій відведення тепла, при цьому, вхід еквіваленту антени з'єднаний з другим виходом перемикача "антена-еквівалент", вхід пристрою захисту приймача з'єднаний з другим виходом перемикача "прийом-передача" а його вихід є другим виходом підсилювача потужності, пристрій відведення тепла з'єднаний з другим входом-виходом підсилювача, третій вхід якого, та вхід модулятора є, відповідно, другим та першим входами підсилювача потужності. Крім того, в пасивно-активній радіолокаційній системі, згідно винаходу, приймач АРЛК містить послідовно з'єднані смуговий фільтр, низькошумний підсилювач, змішувач НВЧ, змішувач ПЧ, підсилювачобмежувач, фільтр cтиснення ЛЧМ сигналів та когерентний детектор вихід якого є виходом приймача АРЛК, при цьому, вхід см угового фільтру є першим входом приймача АРЛК а др угий вхід когерентного детектора та другі входи змішувача НВЧ та змішувача ПЧ, є другим входом приймача АРЛК. Така побудова пасивно-активної радіолокаційної системи забезпечує: - виявлення та вимірювання координат носіїв надводних та повітряних, випромінюючих в широкому діапазоні частот, об"єктів пасивним радіолокаційним пристроєм; - зменшення часу вимірювання координат носіїв BO, за рахунок короткочасного включення активного радіолокаційного пристрою в напрямках, що попередньо визначені пасивним радіолокаційним пристроєм. Суть винаходу пояснюється наступним описом та кресленнями, де: на фіг 1 наведена блок-схема пасивно-активної радіолокаційної системи; на фіг.2 наведена блок-схема антени; на фіг.3 наведена блок-схема формувача зондуючих сигналів; на фіг.4 наведена блок-схема підсилювача потужності; на фіг.5 наведена блок-схема приймача АРЛК. Запропонована пасивно-активна радіолокаційна система, див. фіг.1, містить антену 1, привід антени 2, датчик сканування антени 3, приймач 4, блок визначення кутових координат 5, пристрій індикації 6, перший блок обчислення відстані 7, формувач керуючи х сигналів 8, антену компенсації бокового випромінювання 9, антену компенсації фонового випромінювання 10, приймач компенсації бокового випромінювання 11, приймач компенсації фонового випромінювання 12, блок порівняння 13, блок аналізу 14, формувач керуючих сигналів АРЛК 15, формувач стробу випромінювання 16, формувач зондуючи х імпульсів 17, підсилювач потужності 18, приймач АРЛК 19 та пристрій індикації АРЛК 20, при цьому, перший вхід антени 1 через привід антени 2 підключений до першого виходу датчика сканування антени З, перший вихід антени 1 підключений до першого входу датчика сканування антени 3 та другого входу блока визначення кутови х координат 5, третій вхід якого підключений до другого виходу датчика сканування антени З, четвертий вихід підключений до другого входу датчика сканування антени З, перший вихід підключений до перших входів пристрою індикації 6 і першого блока обчислення відстані 7, другий вихід підключений до другого входу пристрою індикації 6, третій вхід пристрою індикації 6 підключений до виходу першого блока обчислення відстані 7, перший вихід формувача керуючих сигналів 8 підключений до другого входу антени 1, другий вихід підключений до четвертого входу блока визначення кутови х координат 5, а третій вхід антени 1 та другий вхід першого блока обчислення відстані 7 є входами системи, вихід антени компенсації бокового випромінювання 9, через приймач компенсації бокового випромінювання 11, підключений до другого входу блока порівняння 13, вихід антени компенсації фонового випромінювання 10, через приймач компенсації фонового випромінювання 12, підключений до третього входу блока порівняння 13/ вихід якого підключений до першого входу блока визначення кутови х координат 5, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат 5 підключені до входів блока аналізу 14, вихід якого підключений до четвертого входу пристрою індикації 6, згаданий вихід приводу антени 2 підключений до перших входів антени компенсації бокового випромінювання 9 та антени компенсації фонового випромінювання 10, другі входи яких, та четвертий вхід антени 1, підключені до третього виходу формувача керуючих сигналів 8, згаданий третій вхід антени 1 з'єднаний з третіми входами антени компенсації бокового випромінювання 9 та антени компенсації фонового випромінювання 10, перший вхід формувача керуючи х сигналів АРЛК 15 підключений до четвертого виходу відомого формувача керуючих сигналів 8, додаткові четвертий та п"ятий виходи якого, відповідно підключені до першого виходу формувача керуючих сигналів АРЛК 15 та додаткового п"ятого входу відомої антени 1, другий та третій виходи формувача керуючих си гналів АРЛК 15 відповідно підключені до першого входу підсилювача потужності 18 та входу формувача зондуючи х імпульсів 17, другий вхід формувача керуючих імпульсів АРЛК 15 підключений до першого виходу формувача стробу випромінювання 16 другий ви хід якого підключений до першого входу пристрою індикації АРЛК 20, перший вхід формувача стробу випромінювання 16 та другий вхід пристрою індикації АРЛК 20 з"єднані з названим першим виходом відомого датчика сканування антени 3, другий вхід формувача стробу випромінювання 16 з'єднаний з названим другим виходом відомого блока визначення кутови х координат 5, перший вихід формувача зондуючих імпульсів 17 підключений до другого входу підсилювача потужності 18, перший вихід якого підключений до додаткового шостого входу-ви ходу відомої антени 1 а другий ви хід підключений до першого входу приймача АРЛК 19, другий вхід приймача АРЛК 19 підключений до другого виходу формувача зондуючи х імпульсів 17 а вихід підключений до третього входу пристрою індикації АРЛК 20. Антена 1, див. фіг.2, містить антенне дзеркало 21, редуктор 22, датчик кута 23, перший обертовий пристрій 24, другий обертовий пристрій 25, третій обертовий пристрій 26, опромінювачі діапазонів радіохвиль L 27, S 28, С 29, X ЗО, перемикач "актив-пасив" 31 і вхідні пристрої 32, що містять вхідні надвисокочастотні (НВЧ) підсилювачі 33, 34, 35, 36, відповідно діапазонів L, S, С, X, перетворювачі частоти 37, 38, 39 діапазонів L, С, X і НВЧ перемикач 40, при цьому вхід редуктора 22 є першим входом антени 1 а вихід з'єднаний з антенним дзеркалом 21 і датчиком кута 23 другий вхід і вихід якого підключені через перший обертовий пристрій 24, є відповідно другим входом і першим виходом антени 1, опромінювач 27 діапазону радіохвиль L , через вхідний НВЧ підсилювач 33 діапазону L та перетворювач частоти 37 діапазону L, підключений до першого входу НВЧ перемикача 40, опромінювач 28 діапазону радіохвиль S, підключений до другого входу НВЧ перемикача 40, опромінювач 29 діапазону радіохвиль С, через вхідний НВЧ підсилювач 35 діапазону С та перетворювач частоти 38 діапазону С підключений до третього входу НВЧ перемикача 40, вхід-вихід опромінювана ЗО діапазону радіохвиль X підключений до входу-виходу перемикача "актив-пасив" 31 перший вихід якого через вхідний НВЧ підсилювач 36 діапазону X та перетворювач частоти 39 діапазону Х^підключений до четвертого входу НВЧ перемикача 40, п'ятий вхід та вихід якого, підключені через другий обертовий пристрій 25, є відповідно четвертим входом та другим виходом антени 1, третій вхід перемикача "актив-пасив" 31 є п"ятим входом антени 1 а другий вихід-вхід перемикача "актив-пасив" 31 підключений до входу-виходу третього обертового пристрою 26, вхід-вихід якого є шостим входом-виходом антени 1. Формувач зондуючих імпульсів 17, див. фіг.З, містить послідовно з"єднані когерентний гетеродин , формувач ЛЧМ сигналів 42, перетворювач ПЧ 43, перетворювач НВЧ 44, підсилювач 45, вихід якого є першим виходом формувача зондуючих імпульсів 17, а також містить, синтезатор НВЧ 46 та синтезатор ПЧ 47, перші виходи яких відповідно підключені до други х входів перетворювача НВЧ 44 та перетворювача ПЧ 43, другий вхід формувача ЛЧМ сигналів 42 є входом формувача зондуючи х імпульсів 17 а другі ви ходи синтезатора НВЧ 44, синтезатора ПЧ 43 та третій вихід когерентного гетеродина 41 являють собою другий вихід формувача зондуючи х імпульсів 17. Підсилювач потужності 18, див. фіг.4, містить послідовно з'єднані модулятор 48, підсилювач 49, перемикач "прийом-передача" 50, перемикач "антена-еквівалент" 51, перший вихід-вхід якого є виходомвходом підсилювача потужності 18, а також містить, еквівалент антени 52, пристрій захисту приймача 53 та пристрій відведення тепла 54, при цьому, вхід еквіваленту антени 52 з'єднаний з другим виходом перемикача "антена-еквівалент" 51, вхід пристрою захисту приймача 53 з'єднаний з другим виходом перемикача "прийом-передача" 50 а його вихід є другим виходом підсилювача потужності 18, пристрій відведення тепла 54 з'єднаний з другим входом-виходом підсилювача 49 третій вхід якого, та вхід модулятора 48 є, відповідно, другим та першим входами підсилювача потужності 18. Приймач АРЛК 19, див. фіг.5, містить послідовно з"єднані смуговий фільтр 55, низькошумний підсилювач 56, змішувач НВЧ 57, змішувач ПЧ 58, підсилювач обмежувач 59, фільтр зтиснення ЛЧМ сигналів 60 та когерентний детектор 61 вихід якого є виходом приймача АРЛК 19, вхід см угового фільтру 55 є першим входом приймача АРЛК 19 а другий вхід когерентного детектора 61, другі входи змішувача НВЧ 57 та змішувача ПЧ 58 є другим входом приймача АРЛК 19. Особливістю побудови і роботи пасивно-активної радіолокаційної системи що пропонується є те, що вона містить в собі два канали - пасивний та активний, кожен із яких може самостійно вирішувати задачу виявлення та вимірювання координат носіїв випромінюючих об"єктів. Робота пасивного радіолокаційного каналу співпадає з роботою найближчого аналогу, а пристрої активного радіолокаційного каналу системи працюють наступним чином. Формувач ЛЧМ сигналів 42 формує зондуючі сигнали на частоті когерентного гетеродина 41. Часове положення зондуючих сигналів визначається положенням у часі імпульсів запуску, що поступають від формувача керуючих сигналів АРЛК 15. Перетворювач ПЧ 43 та перетворювач НВЧ 44, формувача зондуючих імпульсів 17, здійснюють перенос зондуючих сигналів на несучу НВЧ частоту, котрі підсилюються і через підсилювач потужності 18 поступають на випромінювання в антену 1. Віддзеркалені від надводного чи повітряного об"єкта радіосигнали з антени 1 поступають в підсилювач потужності 18, в якому через перемикач "антена-еквівалент" 51, перемикач "прийом-передача" 50, пристрій захисту приймача 53 поступають в приймач АРЛК 19. Приймач АРЛК фільтрує та підсилює прийняті НВЧ сигнали, здійснює їх перенос на другу проміжну частоту котрі знову підсилюються та поступають на вхід когерентного детектора 61, на опорний вхід якого поступає опорне коливання з виходу когерентного гетеродина 41 формувача зондуючих імпульсів 17. Гетеродинні коливання для перетворювача ПЧ 43, перетворювача НВЧ 44, змішувача НВЧ 57 та змішувача ПЧ 58 формуються синтезатором НВЧ 46 та синтезатором ПЧ 47. З виходу когерентного детектора 61, котрий являє собою вихід приймача АРЛК 19, сигнал поступає на пристрій індикації АРЛК 20, на інші входи якого поступають поточне значення пеленгу антени, від датчика сканування антени 3 та дозвіл на випромінювання від формувача стробу випромінювання 16. Загальним пристроєм обох каналів системи є антена 1, що і обумовлює особливості роботи системи. Спочатку система, за допомогою пасивного радіолокаційного каналу, виконує пошук випромінюючих об'єктів в зоні розміщення носія системи в одному, або декількох, чи всі х робочих діапазонах радіохвиль. Апаратура активного радіолокаційного каналу в цей час може бути взагалі виключена, чи включена, залежно від потреби готовності, та виведена на режим роботи на еквівалент антени 22. Після виявлення пасивним каналом випромінюючого об"єкта, з формувача керуючих сигналів 8 на формувач керуючих сигналів АРЛК 15 поступає команда, що дозволяє роботу АРЛК на випромінювання. Одночасно на перемикач "актив-пасив" 31 антени 1 поступає команда, що забезпечує підключення рупорного опромінювача ЗО діапазону радіохвиль X антени 1, до виходу-входу перемикача "антена-еквівалент" 51 підсилювача потужності 18. Пасивний канал, якщо перед цим він працював в діапазоні X радіохвиль, переводиться в інший робочий діапазон і продовжує пошук в тому ж напрямку і з тими ж параметрами просторового пошуку (величина сектору пошуку, швидкість обертання антени). В активному каналі формувач стробу випромінювання 16, аналізуючи різницю Пі - Пво, в якій Пі - поточне значення пеленгу антени 1, що поступає від датчика сканування антени 3, а Пво - пеленг випромінюючого об"єкту, що поступає від блока визначення кутови х координат 5, формує та видає через формувач керуючих сигналів АРЛК 15 на формувач зондуючих імпульсів 17 та підсилювач потужності 18 дозвіл, який забезпечує випромінювання зондуючих СВЧ сигналів в межах ± 2...5° (залежно від діапазону радіохвиль в якому пасивний канал виявив ВО) від напрямку на ВО. Якщо об"єкт знаходиться в зоні радіовидимості, то за один прохід антеною 1 напрямку на нього активний радіолокаційний канал системи визначить його дальність та уточнить пеленг і після цього знову може бути переведений в режим роботи на еквівалент. Якщо за один прохід антени 1 напрямку на ВО активний канал не виявив об"єкт, то по рішенню оператора забезпечується спроба його виявлення активним каналом на слідуючому проході антеною 1 того ж напрямку, або система переводиться в режим вимірювання координат ВО рішенням триангуляційної задачі пасивним каналом. Пасивно-активна радіолокаційна система, що заявляється, має технічну перевагу над найближчим аналогом, а саме, попереднє визначення пасивним радіолокаційним каналом пеленгу ВО і наступне короткочасне включення на випромінювання активного радіолокаційного каналу, в умовах надрефракції, чи в умовах коли дальність носія ВО не перевищує радіогоризонт, забезпечує зменшення часу вимірювання координат носіїв ВО, забезпечує малопомітність роботи пасивно-активної системи так як не призводить або затрудняє передчасне виявлення носія системи аналогічними засобами чи засобами радіомоніторингу носія ВО. У НДІ "Квант - Радіолокація" розроблена технічна та конструкторська документація, по якій виготовлена апаратура та проведено повний цикл випробувань запропонованої пасивно-активної радіолокаційної системи. Виконані в реальних умовах випробування системи підтвердили її технічну перевагу над найближчим аналогом.
ДивитисяДодаткова інформація
Назва патенту англійськоюPassive-active radar system
Автори англійськоюAndrusenko Mykola Ivanovych, Bilanovskyi Mykhailo Mykolaiovych, Bilokoz Sеrhіі Sеrhііоvусh, Butyrin Anatolii Viktorovych, Huz Volodymyr Ivanovych, Yena Hryhorii Оlекsаndrоvусh, Lipatov Valerii Pavlovych, Tolstykhin Mykola Viktorovych, Кhоmеnко Mykola Vasyliovych, Shovhun Vitalii Andriiovych
Назва патенту російськоюПассивно-активная радиолокационная система
Автори російськоюАндрусенко Николай Иванович, Билановский Михаил Николаевич, Билокоз Сергей Сергеевич, Бутырин Анатолий Викторович, Гузь Владимир Иванович, Ена Григорий Александрович, Липатов Валерий Павлович, Толстихин Николай Викторович, Хоменко Николай Васильевич, Шовгун Виталий Андреевич
МПК / Мітки
МПК: G01S 13/86
Мітки: радіолокаційна, система, пасивно-активна
Код посилання
<a href="https://ua.patents.su/8-78931-pasivno-aktivna-radiolokacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Пасивно-активна радіолокаційна система</a>
Пасивно-активна радіолокаційна система
Номер патенту: 12292
Опубліковано: 16.01.2006
Автори: Біличенко Іван Іванович, Білановський Михайло Миколайович, Гузь Володимир Іванович, Шовгун Віталій Андрійович, Бутирін Анатолій Вікторович, Хоменко Микола Васильович, Білокоз Сергій Сергійович, Єна Григорій Олександрович, Ліпатов Валерій Павлович, Андрусенко Микола Іванович, Толстіхін Микола Вікторович
МПК: G01S 13/86
Мітки: пасивно-активна, радіолокаційна, система
Формула / Реферат:
1. Пасивно-активна радіолокаційна система, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при...
Пасивно-активна лазерна система прицілювання
Номер патенту: 48911
Опубліковано: 15.08.2002
Автори: Кравчук Ілля Степанович, Архипов Микола Іванович
МПК: F41G 1/00
Мітки: система, лазерна, прицілювання, пасивно-активна
Формула / Реферат:
1. Пасивно-активна лазерна система прицілювання, що містить окуляри нічного бачення, зброю і лазерний освітлювач, який закріплений на зброї, при цьому діапазон чутливості окулярів нічного бачення виконаний погодженим з діапазоном оптичного випромінювання лазерного освітлювача, яка відрізняється тим, що в систему додатково введені обчислювач сигналів випередження в горизонтальній і вертикальній площинах, гіроплатформа з карданним підвісом,...
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Шовгун Віталій Андрійович, Біличенко Іван Федорович, Єна Григорій Олександрович, Білановський Михайло Миколайович, Толстіхін Микола Вікторович, Ліпатов Валерій Павлович, Андрусенко Микола Іванович
Мітки: носіїв, вимірювання, повітряних, випромінюючих, станція, координат, радіолокаційна, надводних, об'єктів, пасивна
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 78129
Опубліковано: 15.02.2007
Автори: Біличенко Іван Федорович, Шовгун Віталій Андрійович, Ліпатов Валерій Павлович, Єна Григорій Олександрович, Андрусенко Микола Іванович, Толстіхін Микола Вікторович, Білановський Михайло Миколайович
Мітки: носіїв, радіолокаційна, координат, надводних, станція, об'єктів, вимірювання, випромінюючих, пасивна, повітряних
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Радіолокаційна система
Номер патенту: 19788
Опубліковано: 15.12.2006
Автори: Фількевич Олександр Сергійович, Хоменко Микола Васильович, Торгонський Володимир Васильович, Білокоз Сергій Сергійович, Зайцев Анатолій Якимович, Піронер Ян Михайлович, Ліпатов Валерій Павлович, Бутирін Анатолій Вікторович, Гузь Володимир Іванович
МПК: G01S 13/02
Мітки: радіолокаційна, система
Формула / Реферат:
1. Радіолокаційна система, що містить антену, обертальні переходи за кутом місця та курсовим кутом, пристрій відліку координат, пристрій вторинної обробки, відеопроцесор, процесор керування, контролер, перший та другий пристрої керування приводам, привід повороту антени, привід обертання антени, датчик кута місця, датчик курсового кута, перший процесор обміну, приймально-передавальний пристрій, що має у своєму складі когерентний гетеродин,...
Попередній патент: Композиція інгредієнтів для бальзаму “можжевёловый”
Наступний патент: Модифікатор класу umcsc
Випадковий патент: Комбінація кристалічної форми1 2-((r)-2-метилпіролідин-2-іл)-1н-бензімідазол-4-карбоксаміду та протиракового лікарського засобу