Спосіб визначення технічного стану жорсткої проводки системи керування літального апарата
Номер патенту: 79739
Опубліковано: 25.04.2013
Автори: Тищенко Микола Павлович, Галушка Аліна Володимирівна, Ткаліч Андрій Юрійович, Галушка Володимир Іванович, Вернигора Ольга Вікторівна, В'язовський Андрій Валерійович, Бовсунівський Олексій Сергійович, Садомов Олександр Миколайович, Доманський Максим Олександрович, Обіход Антон Олександрович, Расстригін Олександр Олексійович, Ліскович Назарій Юрійович, Кривохатько Іван Володимирович, Комаров Володимир Олександрович, Ткаліч Артем Юрійович, Самоздран Євген Сергійович, Ткаченко Володимир Анатолійович, Башинський Володимир Георгійович
Формула / Реферат
1. Спосіб визначення технічного стану жорсткої проводки системи керування літального апарата, при якому збуджують поперечні коливання елемента стержневого типу, визначають частоту власних коливань цієї конструкції, а про наявність ушкодження судять по неузгодженості еталонної, заміряної на свідомо неушкодженій аналогічній конструкції, і фактичної частоти, заміряної на літальному апараті, що контролюється, який відрізняється тим, що елементи стержневого типу з'єднують між собою в систему керування жорсткого типу літального апарата, зазначену проводку системи керування літального апарата жорстко фіксують зі сторони ручки керування літального апарата, а коливання всієї жорсткої проводки системи керування літального апарата збуджують через рульову поверхню з прикладанням навантаження імпульсного типу на вільному кінці останньої.
2. Спосіб за п. 1, який відрізняється тим, що навантаження імпульсного типу збуджують у виді власних/авторезонансних коливань.
Текст
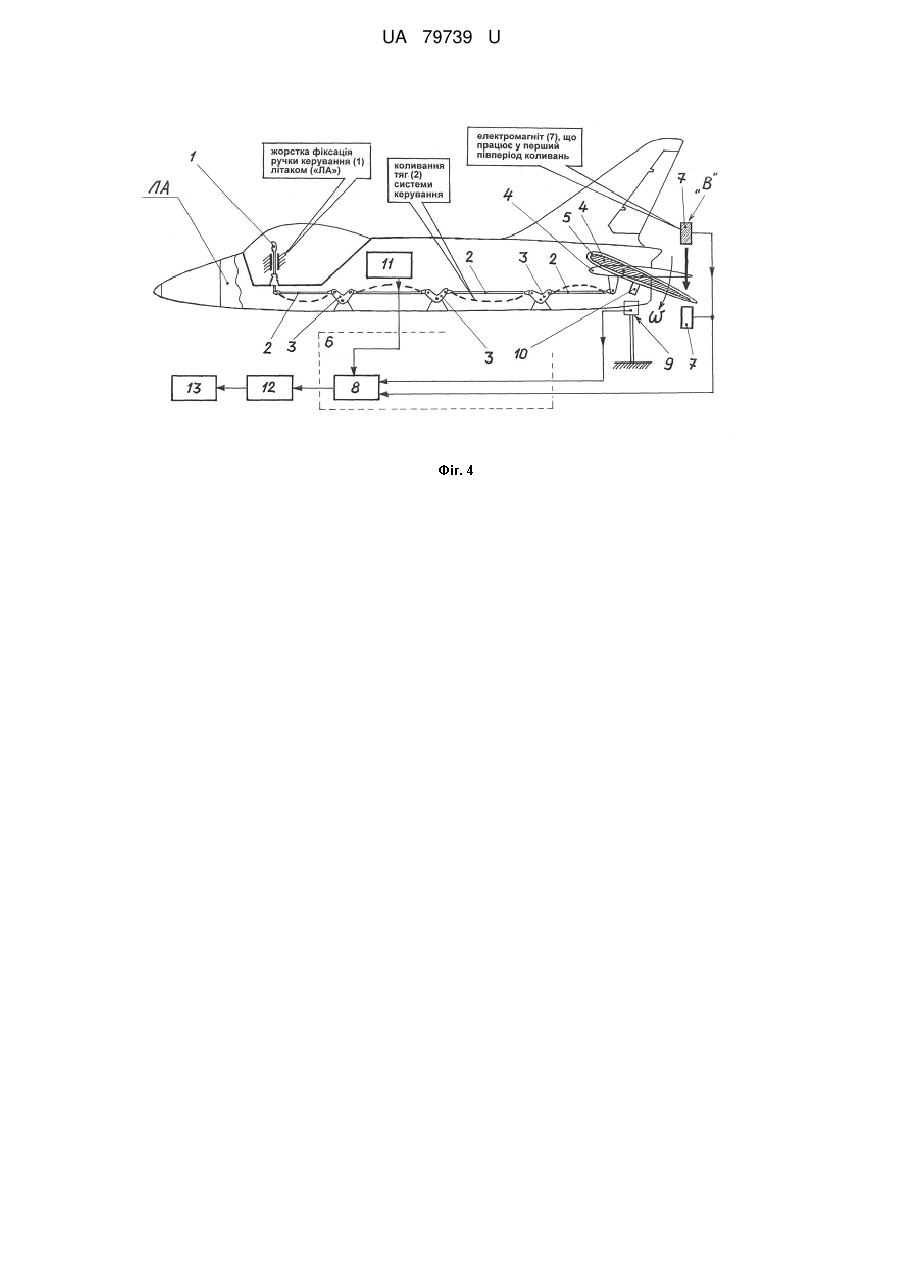
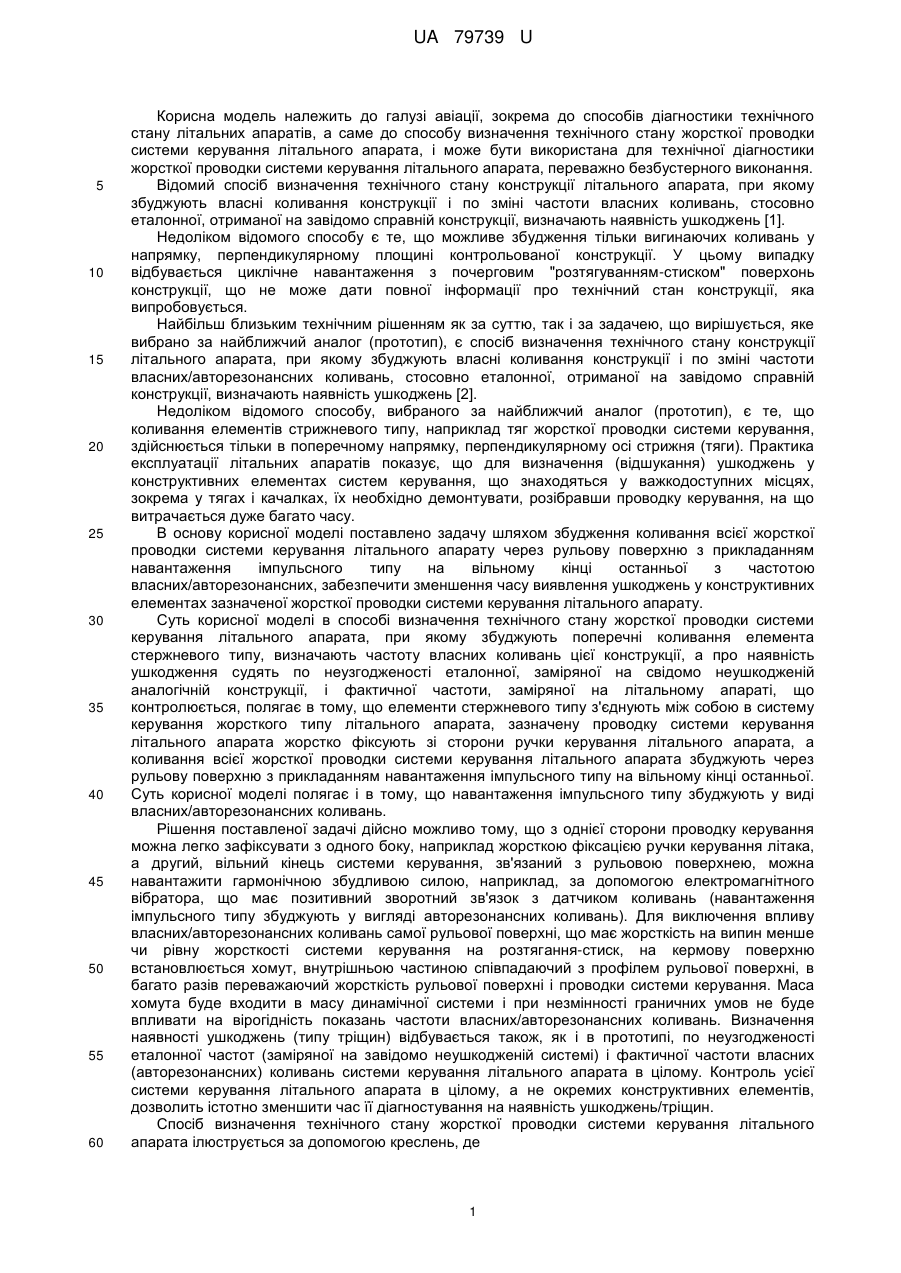
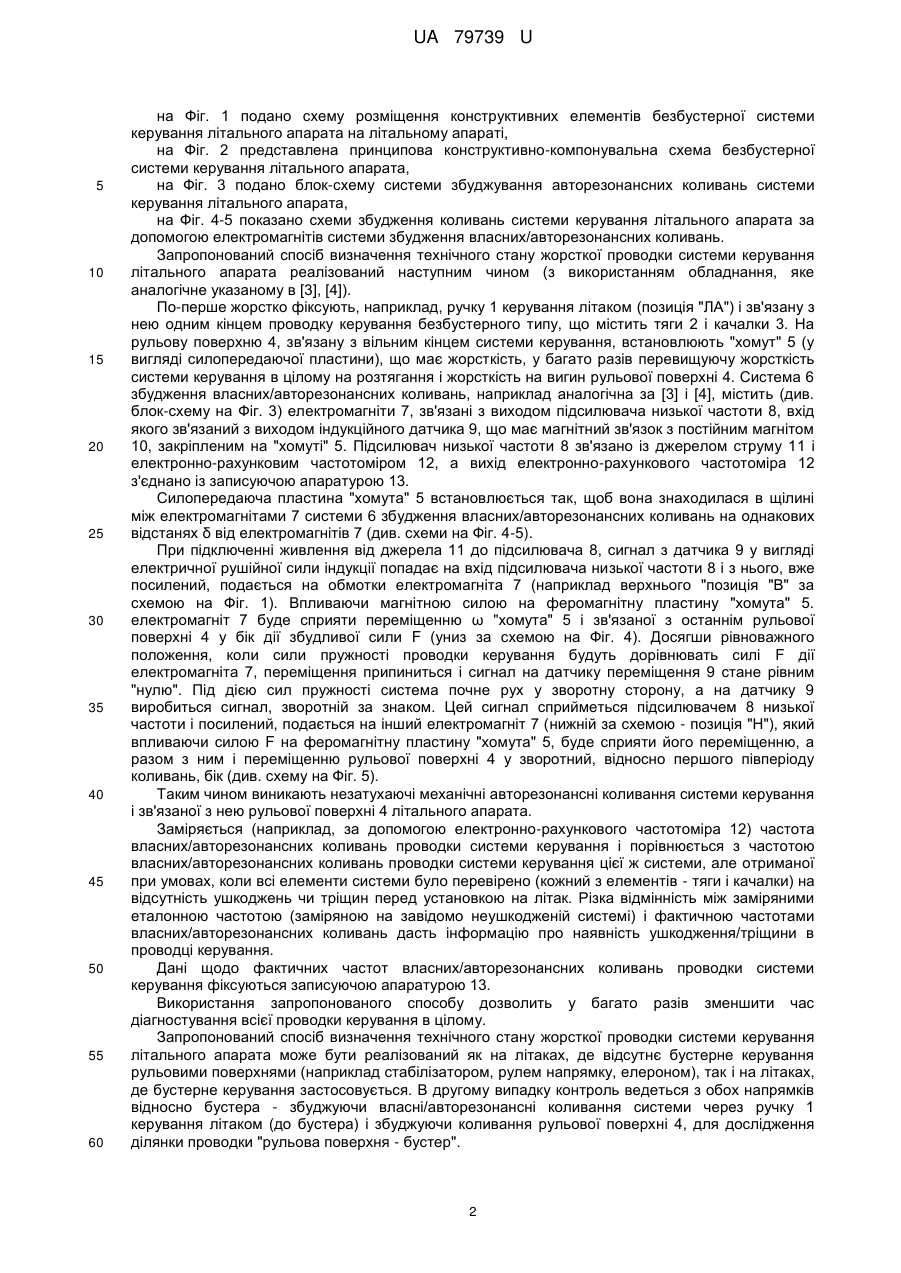
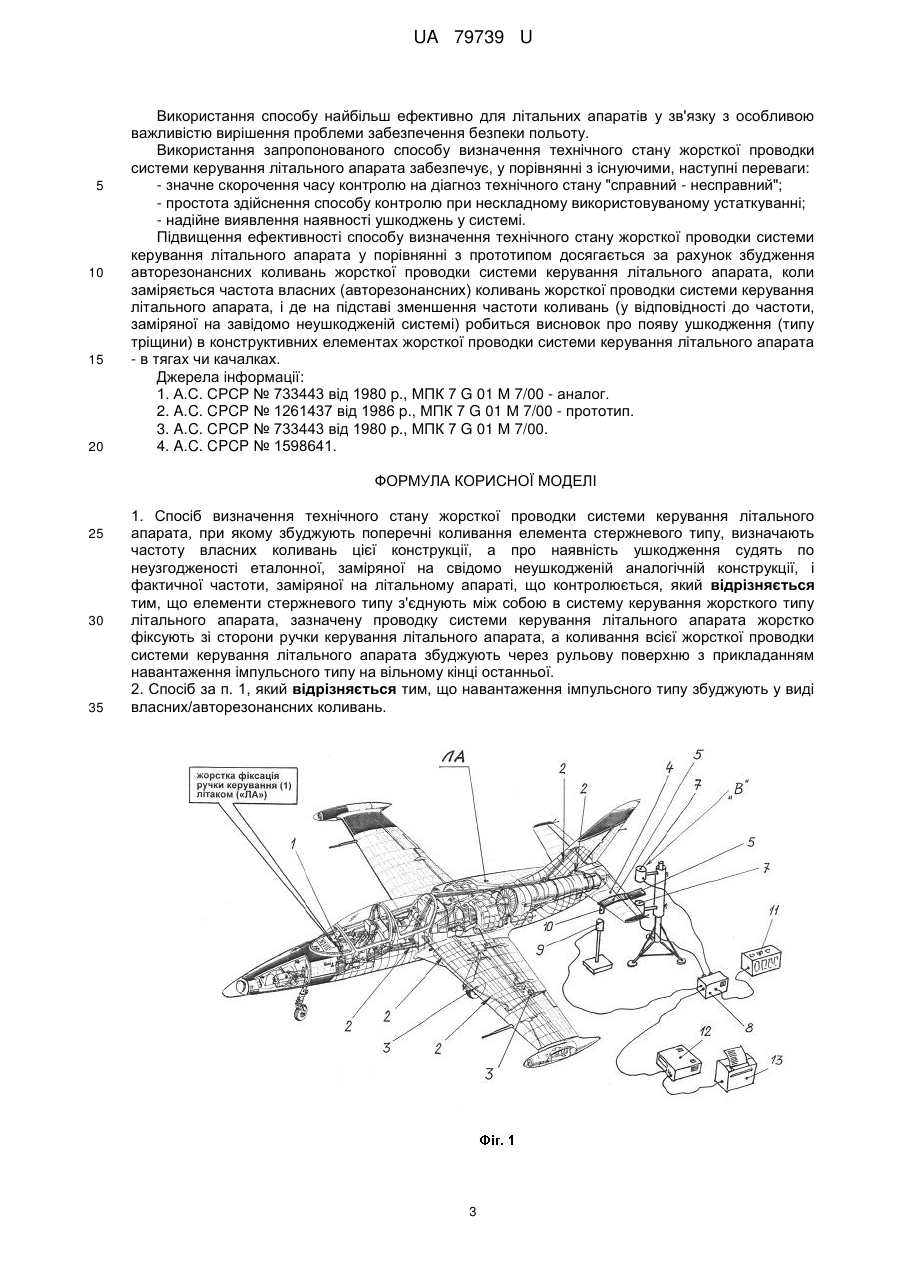
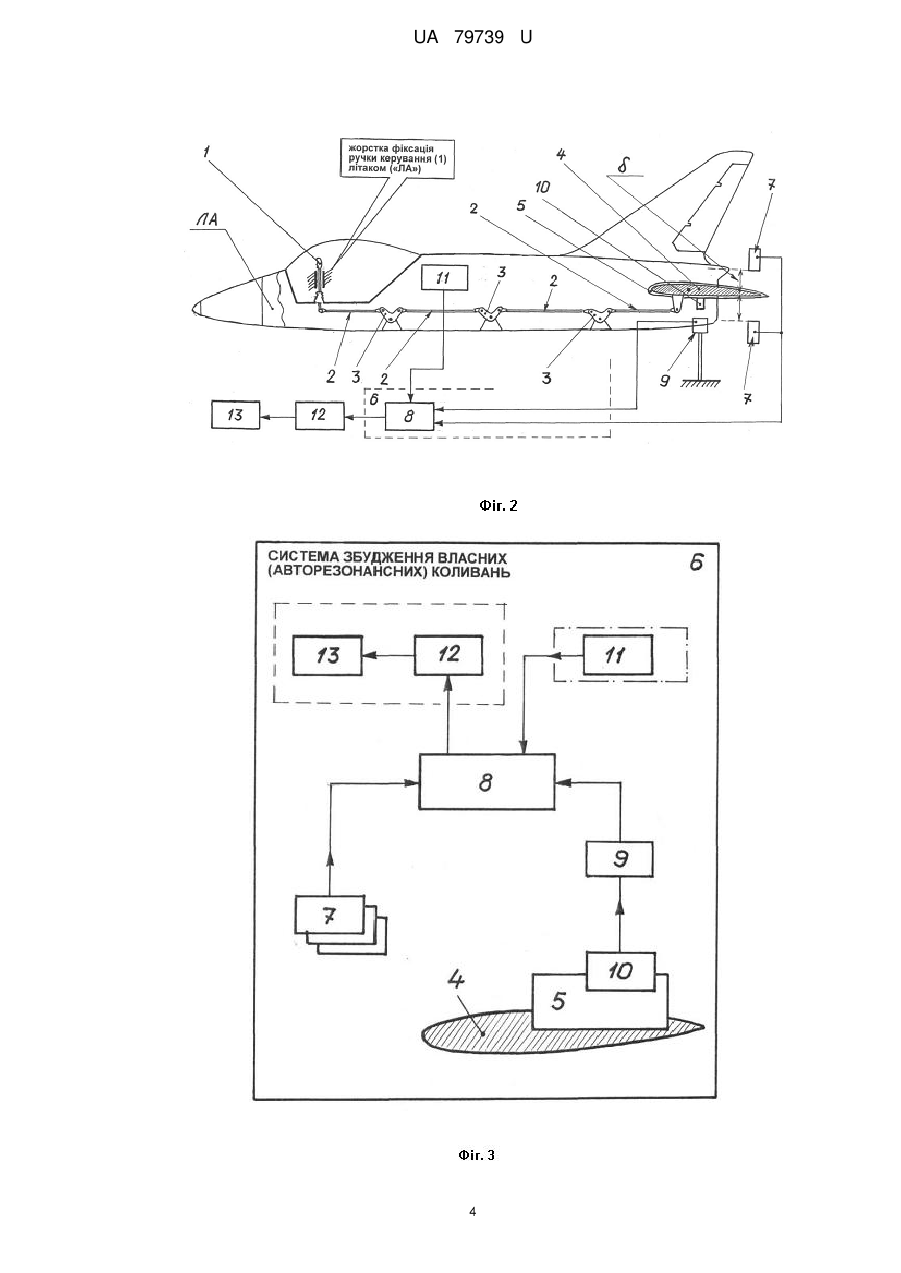
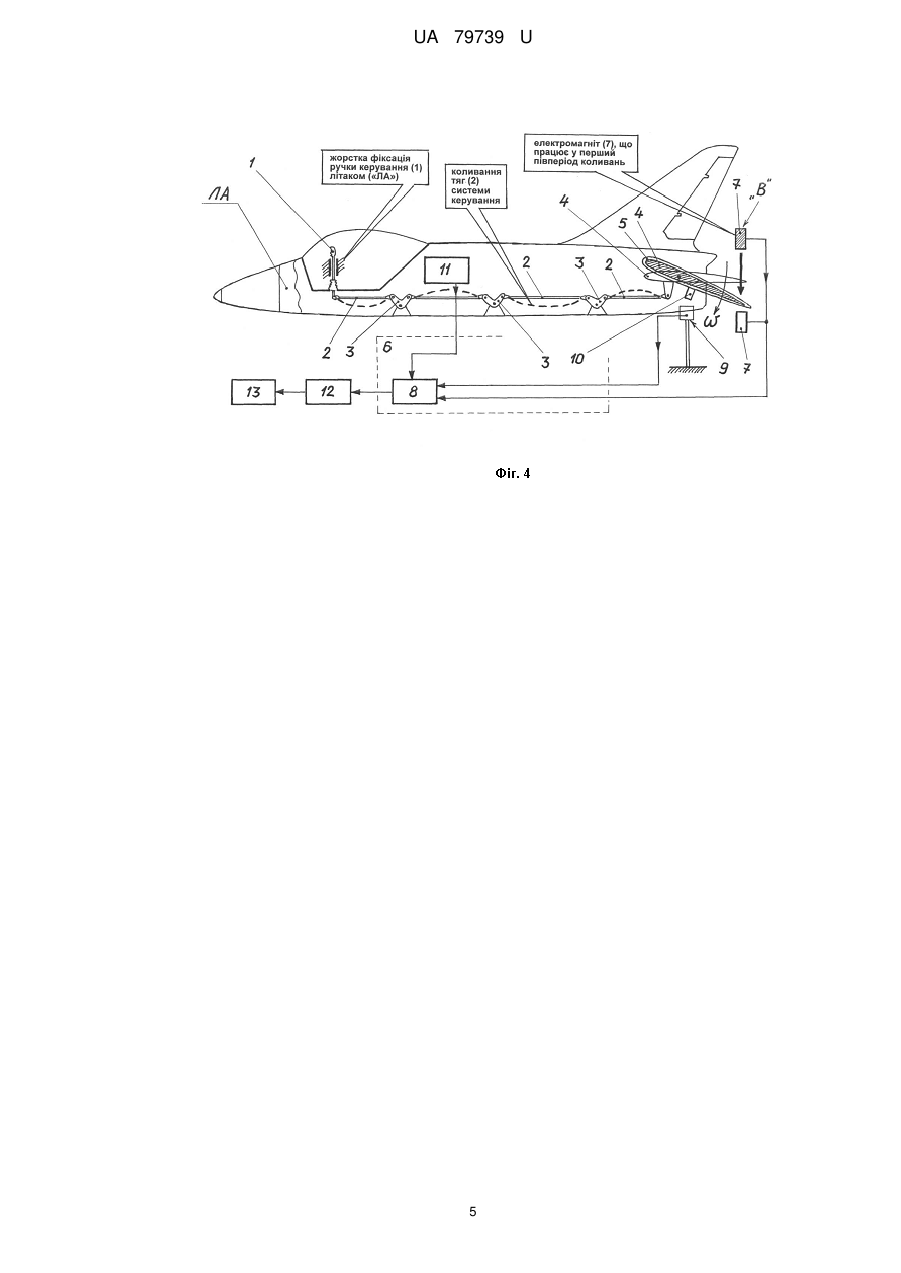
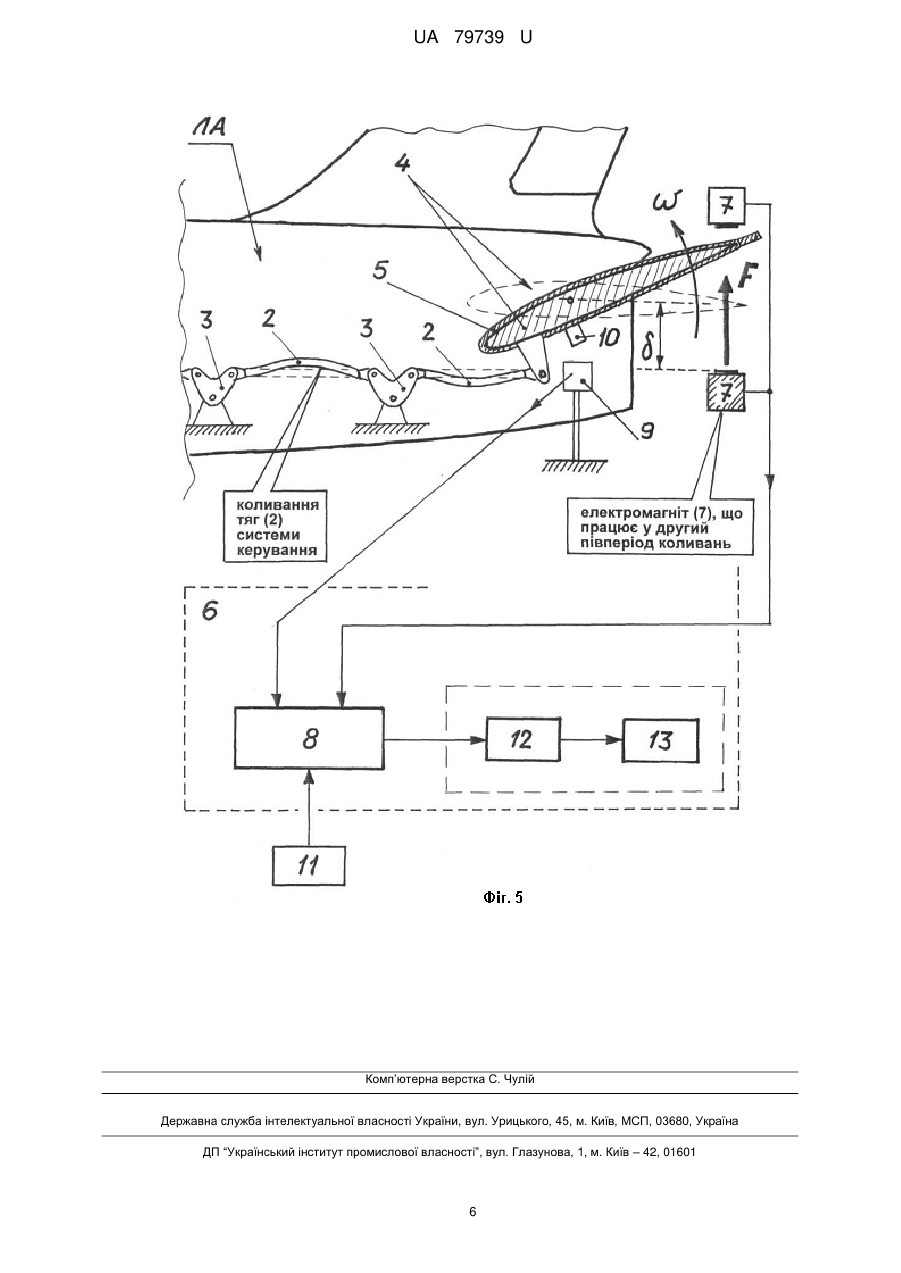
Реферат: Спосіб визначення технічного стану жорсткої проводки системи керування літального апарата, при якому збуджують поперечні коливання елемента стержневого типу, визначають частоту власних коливань цієї конструкції, а про наявність ушкодження судять по неузгодженості еталонної, заміряної на свідомо неушкодженій аналогічній конструкції, і фактичної частоти, заміряної на літальному апараті, що контролюється. Елементи стержневого типу з'єднують між собою в систему керування жорсткого типу літального апарата, зазначену проводку системи керування літального апарата жорстко фіксують зі сторони ручки керування літального апарата, а коливання всієї жорсткої проводки системи керування літального апарата збуджують через рульову поверхню з прикладанням навантаження імпульсного типу на вільному кінці останньої. Навантаження імпульсного типу збуджують у виді власних/авторезонансних коливань. UA 79739 U (12) UA 79739 U UA 79739 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіації, зокрема до способів діагностики технічного стану літальних апаратів, а саме до способу визначення технічного стану жорсткої проводки системи керування літального апарата, і може бути використана для технічної діагностики жорсткої проводки системи керування літального апарата, переважно безбустерного виконання. Відомий спосіб визначення технічного стану конструкції літального апарата, при якому збуджують власні коливання конструкції і по зміні частоти власних коливань, стосовно еталонної, отриманої на завідомо справній конструкції, визначають наявність ушкоджень [1]. Недоліком відомого способу є те, що можливе збудження тільки вигинаючих коливань у напрямку, перпендикулярному площині контрольованої конструкції. У цьому випадку відбувається циклічне навантаження з почерговим "розтягуванням-стиском" поверхонь конструкції, що не може дати повної інформації про технічний стан конструкції, яка випробовується. Найбільш близьким технічним рішенням як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є спосіб визначення технічного стану конструкції літального апарата, при якому збуджують власні коливання конструкції і по зміні частоти власних/авторезонансних коливань, стосовно еталонної, отриманої на завідомо справній конструкції, визначають наявність ушкоджень [2]. Недоліком відомого способу, вибраного за найближчий аналог (прототип), є те, що коливання елементів стрижневого типу, наприклад тяг жорсткої проводки системи керування, здійснюється тільки в поперечному напрямку, перпендикулярному осі стрижня (тяги). Практика експлуатації літальних апаратів показує, що для визначення (відшукання) ушкоджень у конструктивних елементах систем керування, що знаходяться у важкодоступних місцях, зокрема у тягах і качалках, їх необхідно демонтувати, розібравши проводку керування, на що витрачається дуже багато часу. В основу корисної моделі поставлено задачу шляхом збудження коливання всієї жорсткої проводки системи керування літального апарату через рульову поверхню з прикладанням навантаження імпульсного типу на вільному кінці останньої з частотою власних/авторезонансних, забезпечити зменшення часу виявлення ушкоджень у конструктивних елементах зазначеної жорсткої проводки системи керування літального апарату. Суть корисної моделі в способі визначення технічного стану жорсткої проводки системи керування літального апарата, при якому збуджують поперечні коливання елемента стержневого типу, визначають частоту власних коливань цієї конструкції, а про наявність ушкодження судять по неузгодженості еталонної, заміряної на свідомо неушкодженій аналогічній конструкції, і фактичної частоти, заміряної на літальному апараті, що контролюється, полягає в тому, що елементи стержневого типу з'єднують між собою в систему керування жорсткого типу літального апарата, зазначену проводку системи керування літального апарата жорстко фіксують зі сторони ручки керування літального апарата, а коливання всієї жорсткої проводки системи керування літального апарата збуджують через рульову поверхню з прикладанням навантаження імпульсного типу на вільному кінці останньої. Суть корисної моделі полягає і в тому, що навантаження імпульсного типу збуджують у виді власних/авторезонансних коливань. Рішення поставленої задачі дійсно можливо тому, що з однієї сторони проводку керування можна легко зафіксувати з одного боку, наприклад жорсткою фіксацією ручки керування літака, а другий, вільний кінець системи керування, зв'язаний з рульовою поверхнею, можна навантажити гармонічною збудливою силою, наприклад, за допомогою електромагнітного вібратора, що має позитивний зворотний зв'язок з датчиком коливань (навантаження імпульсного типу збуджують у вигляді авторезонансних коливань). Для виключення впливу власних/авторезонансних коливань самої рульової поверхні, що має жорсткість на випин менше чи рівну жорсткості системи керування на розтягання-стиск, на кермову поверхню встановлюється хомут, внутрішньою частиною співпадаючий з профілем рульової поверхні, в багато разів переважаючий жорсткість рульової поверхні і проводки системи керування. Маса хомута буде входити в масу динамічної системи і при незмінності граничних умов не буде впливати на вірогідність показань частоти власних/авторезонансних коливань. Визначення наявності ушкоджень (типу тріщин) відбувається також, як і в прототипі, по неузгодженості еталонної частот (заміряної на завідомо неушкодженій системі) і фактичної частоти власних (авторезонансних) коливань системи керування літального апарата в цілому. Контроль усієї системи керування літального апарата в цілому, а не окремих конструктивних елементів, дозволить істотно зменшити час її діагностування на наявність ушкоджень/тріщин. Спосіб визначення технічного стану жорсткої проводки системи керування літального апарата ілюструється за допомогою креслень, де 1 UA 79739 U 5 10 15 20 25 30 35 40 45 50 55 60 на Фіг. 1 подано схему розміщення конструктивних елементів безбустерної системи керування літального апарата на літальному апараті, на Фіг. 2 представлена принципова конструктивно-компонувальна схема безбустерної системи керування літального апарата, на Фіг. 3 подано блок-схему системи збуджування авторезонансних коливань системи керування літального апарата, на Фіг. 4-5 показано схеми збудження коливань системи керування літального апарата за допомогою електромагнітів системи збудження власних/авторезонансних коливань. Запропонований спосіб визначення технічного стану жорсткої проводки системи керування літального апарата реалізований наступним чином (з використанням обладнання, яке аналогічне указаному в [3], [4]). По-перше жорстко фіксують, наприклад, ручку 1 керування літаком (позиція "ЛА") і зв'язану з нею одним кінцем проводку керування безбустерного типу, що містить тяги 2 і качалки 3. На рульову поверхню 4, зв'язану з вільним кінцем системи керування, встановлюють "хомут" 5 (у вигляді силопередаючої пластини), що має жорсткість, у багато разів перевищуючу жорсткість системи керування в цілому на розтягання і жорсткість на вигин рульової поверхні 4. Система 6 збудження власних/авторезонансних коливань, наприклад аналогічна за [3] і [4], містить (див. блок-схему на Фіг. 3) електромагніти 7, зв'язані з виходом підсилювача низької частоти 8, вхід якого зв'язаний з виходом індукційного датчика 9, що має магнітний зв'язок з постійним магнітом 10, закріпленим на "хомуті" 5. Підсилювач низької частоти 8 зв'язано із джерелом струму 11 і електронно-рахунковим частотоміром 12, а вихід електронно-рахункового частотоміра 12 з'єднано із записуючою апаратурою 13. Силопередаюча пластина "хомута" 5 встановлюється так, щоб вона знаходилася в щілині між електромагнітами 7 системи 6 збудження власних/авторезонансних коливань на однакових відстанях δ від електромагнітів 7 (див. схеми на Фіг. 4-5). При підключенні живлення від джерела 11 до підсилювача 8, сигнал з датчика 9 у вигляді електричної рушійної сили індукції попадає на вхід підсилювача низької частоти 8 і з нього, вже посилений, подається на обмотки електромагніта 7 (наприклад верхнього "позиція "В" за схемою на Фіг. 1). Впливаючи магнітною силою на феромагнітну пластину "хомута" 5. електромагніт 7 буде сприяти переміщенню ω "хомута" 5 і зв'язаної з останнім рульової поверхні 4 у бік дії збудливої сили F (униз за схемою на Фіг. 4). Досягши рівноважного положення, коли сили пружності проводки керування будуть дорівнювать силі F дії електромагніта 7, переміщення припиниться і сигнал на датчику переміщення 9 стане рівним "нулю". Під дією сил пружності система почне рух у зворотну сторону, а на датчику 9 виробиться сигнал, зворотній за знаком. Цей сигнал сприйметься підсилювачем 8 низької частоти і посилений, подається на інший електромагніт 7 (нижній за схемою - позиція "Н"), який впливаючи силою F на феромагнітну пластину "хомута" 5, буде сприяти його переміщенню, а разом з ним і переміщенню рульової поверхні 4 у зворотний, відносно першого півперіоду коливань, бік (див. схему на Фіг. 5). Таким чином виникають незатухаючі механічні авторезонансні коливання системи керування і зв'язаної з нею рульової поверхні 4 літального апарата. Заміряється (наприклад, за допомогою електронно-рахункового частотоміра 12) частота власних/авторезонансних коливань проводки системи керування і порівнюється з частотою власних/авторезонансних коливань проводки системи керування цієї ж системи, але отриманої при умовах, коли всі елементи системи було перевірено (кожний з елементів - тяги і качалки) на відсутність ушкоджень чи тріщин перед установкою на літак. Різка відмінність між заміряними еталонною частотою (заміряною на завідомо неушкодженій системі) і фактичною частотами власних/авторезонансних коливань дасть інформацію про наявність ушкодження/тріщини в проводці керування. Дані щодо фактичних частот власних/авторезонансних коливань проводки системи керування фіксуються записуючою апаратурою 13. Використання запропонованого способу дозволить у багато разів зменшити час діагностування всієї проводки керування в цілому. Запропонований спосіб визначення технічного стану жорсткої проводки системи керування літального апарата може бути реалізований як на літаках, де відсутнє бустерне керування рульовими поверхнями (наприклад стабілізатором, рулем напрямку, елероном), так і на літаках, де бустерне керування застосовується. В другому випадку контроль ведеться з обох напрямків відносно бустера - збуджуючи власні/авторезонансні коливання системи через ручку 1 керування літаком (до бустера) і збуджуючи коливання рульової поверхні 4, для дослідження ділянки проводки "рульова поверхня - бустер". 2 UA 79739 U 5 10 15 20 Використання способу найбільш ефективно для літальних апаратів у зв'язку з особливою важливістю вирішення проблеми забезпечення безпеки польоту. Використання запропонованого способу визначення технічного стану жорсткої проводки системи керування літального апарата забезпечує, у порівнянні з існуючими, наступні переваги: - значне скорочення часу контролю на діагноз технічного стану "справний - несправний"; - простота здійснення способу контролю при нескладному використовуваному устаткуванні; - надійне виявлення наявності ушкоджень у системі. Підвищення ефективності способу визначення технічного стану жорсткої проводки системи керування літального апарата у порівнянні з прототипом досягається за рахунок збудження авторезонансних коливань жорсткої проводки системи керування літального апарата, коли заміряється частота власних (авторезонансних) коливань жорсткої проводки системи керування літального апарата, і де на підставі зменшення частоти коливань (у відповідності до частоти, заміряної на завідомо неушкодженій системі) робиться висновок про появу ушкодження (типу тріщини) в конструктивних елементах жорсткої проводки системи керування літального апарата - в тягах чи качалках. Джерела інформації: 1. А.С. СРСР № 733443 від 1980 p., МПК 7 G 01 Μ 7/00 - аналог. 2. A.C. CPCP № 1261437 від 1986 p., МПК 7 G 01 Μ 7/00 - прототип. 3. A.C. CPCP № 733443 від 1980 p., МПК 7 G 01 Μ 7/00. 4. A.C. CPCP № 1598641. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 1. Спосіб визначення технічного стану жорсткої проводки системи керування літального апарата, при якому збуджують поперечні коливання елемента стержневого типу, визначають частоту власних коливань цієї конструкції, а про наявність ушкодження судять по неузгодженості еталонної, заміряної на свідомо неушкодженій аналогічній конструкції, і фактичної частоти, заміряної на літальному апараті, що контролюється, який відрізняється тим, що елементи стержневого типу з'єднують між собою в систему керування жорсткого типу літального апарата, зазначену проводку системи керування літального апарата жорстко фіксують зі сторони ручки керування літального апарата, а коливання всієї жорсткої проводки системи керування літального апарата збуджують через рульову поверхню з прикладанням навантаження імпульсного типу на вільному кінці останньої. 2. Спосіб за п. 1, який відрізняється тим, що навантаження імпульсного типу збуджують у виді власних/авторезонансних коливань. 3 UA 79739 U 4 UA 79739 U 5 UA 79739 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing technical state of hard wiring of an aircraft control system
Автори англійськоюKomarov Volodymyr Oleksandrovych, Rasstryhin Oleksandr Oleksiiovych, Bashynskyi Volodymyr Heorhiiovych, Tkachenko Volodymyr Anatoliiovych, Halushka Alina Volodymyrivna, Halushka Volodymyr Ivanovych, Obikhod Anton Oleksandrovych, Viazovskyi Andrii Valeriiovych, Sadomov Oleksandr Mykolaiovych, Vernyhora Olha Viktorivna, Domanskyi Maksym Oleksandrovych, Samozdran Yevhen Serhiiovych, Tyschenko Mykola Pavlovych, Bovsunivskyi Oleksii Serhiiovych, Tkalich Andrii Yuriiovych, Tkalich Artem Yuriiovych, Kryvokhatko Ivan Volodymyrovych, Liskovych Nazarii Yuriiovych
Назва патенту російськоюСпособ определения технического состояния жесткой проводки системы управления летательного аппарата
Автори російськоюКомаров Владимир Александрович, Расстригин Александр Алексеевич, Башинский Владимир Георгиевич, Ткаченко Владимир Анатольевич, Галушка Алина Владимировна, Галушка Владимир Иванович, Обиход Антон Александрович, Вязовский Андрей Валериевич, Садомов Александр Николаевич, Вернигора Ольга Викторовна, Доманский Максим Александрович, Самоздран Евгений Сергеевич, Тищенко Николай Павлович, Бовсуновский Алексей Сергеевич, Ткалич Андрей Юрьевич, Ткалич Артем Юрьевич, Кривохатько Иван Владимирович, Лискович Назарий Юрьевич
МПК / Мітки
МПК: G01M 7/00
Мітки: технічного, системі, проводки, літального, апарата, стану, жорсткої, визначення, спосіб, керування
Код посилання
<a href="https://ua.patents.su/8-79739-sposib-viznachennya-tekhnichnogo-stanu-zhorstko-provodki-sistemi-keruvannya-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення технічного стану жорсткої проводки системи керування літального апарата</a>
Спосіб визначення залишкової міцності конструкції літального апарата в польоті
Номер патенту: 73939
Опубліковано: 10.10.2012
Автори: Комаров Володимир Олександрович, Расстригін Олександр Олексійович, Гордієвський Олексій Тихонович, Гудима Олег Петрович, Архипов Микола Іванович, Башинський Володимир Григорович, Кузнецов Владлен Олександрович
МПК: G01M 7/00
Мітки: літального, конструкції, спосіб, апарата, залишкової, визначення, польоті, міцності
Формула / Реферат:
Спосіб визначення залишкової міцності конструкції літального апарата в польоті, при якому заміряють перевантаження в центрі мас літального апарата, на кінцевій і середній частинах крила, на кінцевих частинах стабілізатора і кіля, по величині якого судять про навантаження і дефектність конструкції, який відрізняється тим, що підсумовують обмірювані в центрі мас літального апарата і на закінцівках крила величини перевантажень, визначають...
Спосіб визначення параметрів руху агрегату та контролю технічного стану системи керування
Номер патенту: 74121
Опубліковано: 25.10.2012
Автори: Лебедєв Анатолій Тихонович, Артьомов Микола Прокопович, Ярошенко Павло Миколайович
МПК: G05B 7/00
Мітки: агрегату, визначення, контролю, стану, технічного, спосіб, керування, руху, системі, параметрів
Формула / Реферат:
Спосіб визначення параметрів руху агрегату при зміні технічного стану системи керування, який відрізняється тим, що для визначення кутів повороту напрямних коліс трактора встановлюють два датчики повороту над цапфами, лівого і правого коліс трактора, датчики закріплюють на кронштейнах, причому кронштейни фіксують на балці переднього моста за допомогою болтових з'єднань, датчики з'єднують з верхніми частинами поворотних цапф коліс трактора за...
Спосіб визначення залишкової міцності конструкції літального апарата в польоті з появою в конструкції ушкоджень, включаючи бойові
Номер патенту: 73996
Опубліковано: 10.10.2012
Автори: Гудима Олег Петрович, Расстригін Олександр Олексійович, Архипов Микола Іванович, Кузнецов Владлен Олександрович, Гордієвський Олексій Тихонович, Башинський Володимир Григорович, Комаров Володимир Олександрович
МПК: G01M 7/00
Мітки: конструкції, бойові, ушкоджень, визначення, включаючи, спосіб, міцності, залишкової, польоті, появою, апарата, літального
Формула / Реферат:
1. Спосіб визначення залишкової міцності конструкції літального апарата в польоті з появою в конструкції ушкоджень, включаючи бойові, при якому заміряють водночас перевантаження в центрі мас літального апарата, на кінцевій і середній частинах крила, по величині яких судять про навантаженість і дефектність конструкції, який відрізняється тим, що заміряють частоту власних/авторезонансних коливань крила, підсумовують обмірювані в центрі мас...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Блаженний Валерій Іванович, Щипанський Павло Володимирович, Герасименко Володимир Вікторович, Слєпов Лев Іванович
МПК: G01S 5/10
Мітки: апарата, визначення, місцеположення, літального, спосіб
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб керування і зміни аеродинамічного компонування безпілотного літального апарата
Номер патенту: 83708
Опубліковано: 11.08.2008
Автори: Клявлін Валерій Володимирович, Коростельов Олег Петрович, Комендантова Людмила Степанівна, Сайног Максим Борисович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович
МПК: F42B 15/01
Мітки: аеродинамічного, безпілотного, апарата, компонування, літального, зміни, керування, спосіб
Формула / Реферат:
1. Спосіб керування і зміни аеродинамічного компонування безпілотного літального апарата, що містить стартовий і маршовий двигуни, який включає його пуск з транспортно-пускового контейнера з примусовим розкручуванням навколо поздовжньої осі, підтримання необхідної частоти обертання на траєкторії, зміну аеродинамічного компонування у польоті, а також керування в одноканальному режимі по тангажу і рисканню, який відрізняється тим, що як на...
Попередній патент: Автоматизований комплекс групового зберігання озброєння та бронетанкової техніки
Наступний патент: Спосіб проведення закритої стратифікації щеп винограду
Випадковий патент: Автобалансувальний пристрій ротора