Анізотропно-ротаційна система

Формула / Реферат
Анізотропно-ротаційна система, що містить основу, на якій встановлена напрямна, на напрямну посаджений повзун, повзун з'єднаний з навантажувальним елементом, повзун зв'язаний з основою пружним елементом, яка відрізняється тим, що навантажувальний елемент виконаний у вигляді другої напрямної, вісь другої напрямної розташована в нормальній площині до осі першої напрямної, на другу напрямну посаджений другий повзун, другий повзун шарнірно зв'язаний із шатунною шийкою кривошипного вала, у якому корінна опора кривошипного вала з'єднана з третім повзуном, третій повзун посаджений на третю напрямну, вісь третьої напрямної паралельна осі першої напрямної та третя напрямна з'єднана з основою, причому застосовано дві перших напрямні, на кожну першу напрямну посаджене по індивідуальному першому повзуну, зв'язаному своїм індивідуальним пружним елементом із спільною основою та пов'язаною з індивідуальною другою напрямною, на кожну другу напрямну посаджений другий індивідуальний повзун, шарнірно-пов'язаний із своєю індивідуальною шатунною шийкою єдиного кривошипного вала, при цьому друга шатунна шийка кривошипного вала розташована із протилежної сторони єдиної корінної шийки в протилежному куті щодо кута розташування першої шатунної шийки, з можливістю навантаження опори корінної шийки кривошипного вала, притискними уздовж осі третьої напрямної до основи силами, з осіданням пружних елементів і переміщенням перших повзунів уздовж перших напрямних спільно із другими напрямними та другими повзунами, а також із кривошипним валом і третім повзуном і навантаженням основи від пружних елементів силами, рівними притискними опору корінної шийки до основи силами, з можливістю обертання кривошипного вала навколо осі своєї корінної шийки з рухом третього та других повзунів із другими напрямними та першими повзунами з торцями пружних елементів у напрямку осей перших і третьої напрямних і з виникненням у пружних елементах перехідних процесів з коливальним рухом пружних елементів і зв'язаних з ними елементів, з виникненням у пружних елементах сил внутрішнього тертя із частковим зменшенням осідання пружних елементів і частковим підйомом кривошипного вала із другими повзунами та другими напрямними та частковим зменшенням навантаження основи від пружних елементів.
Текст
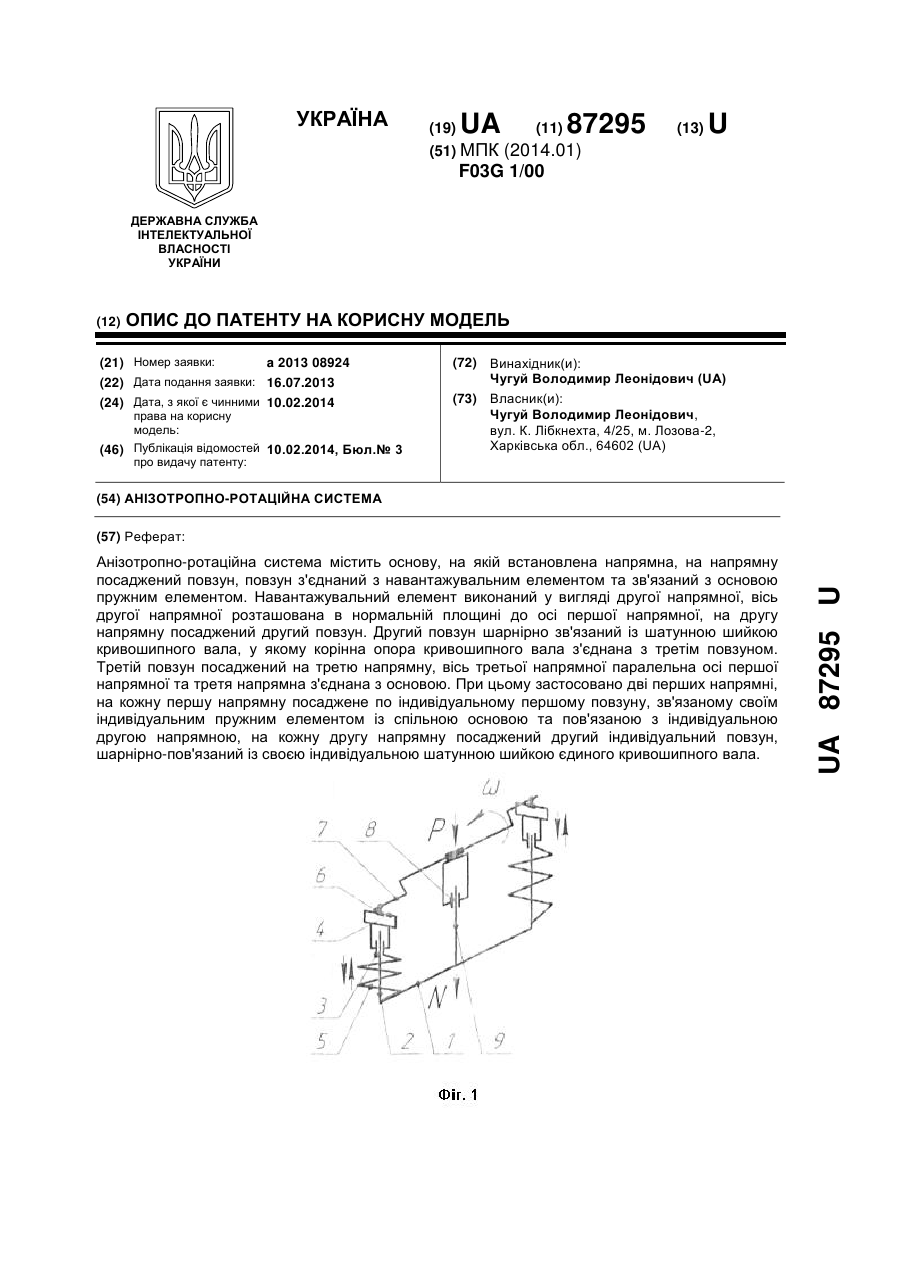
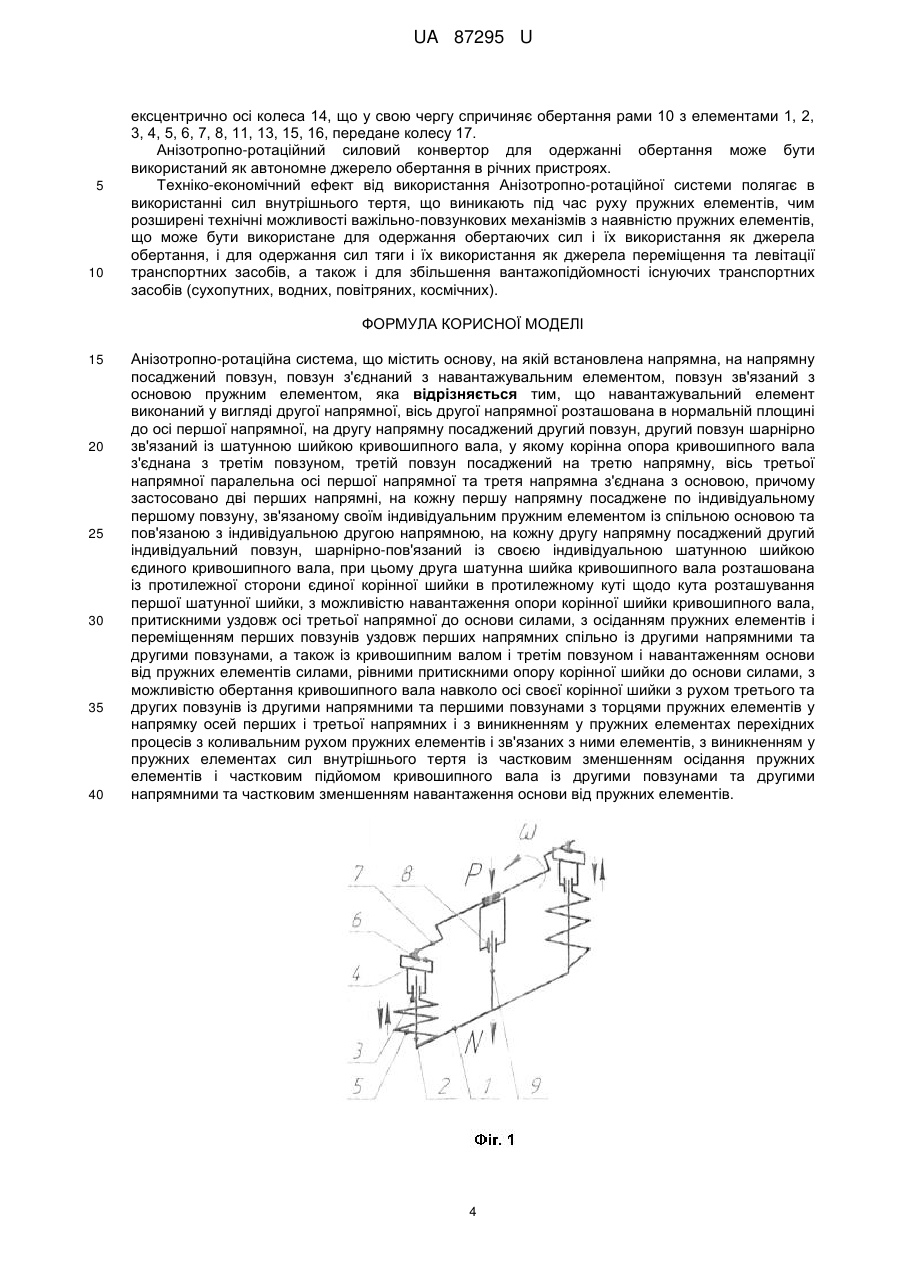
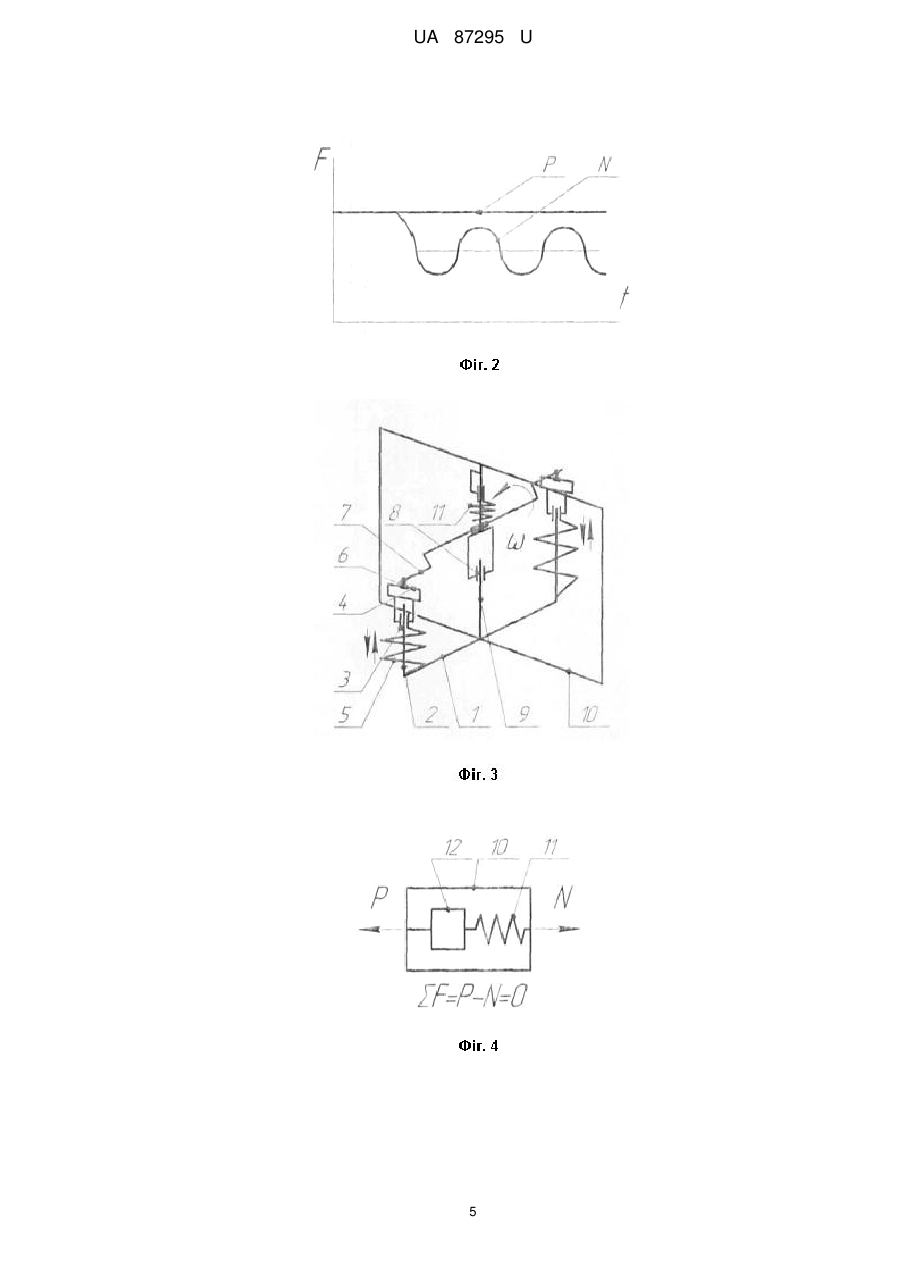
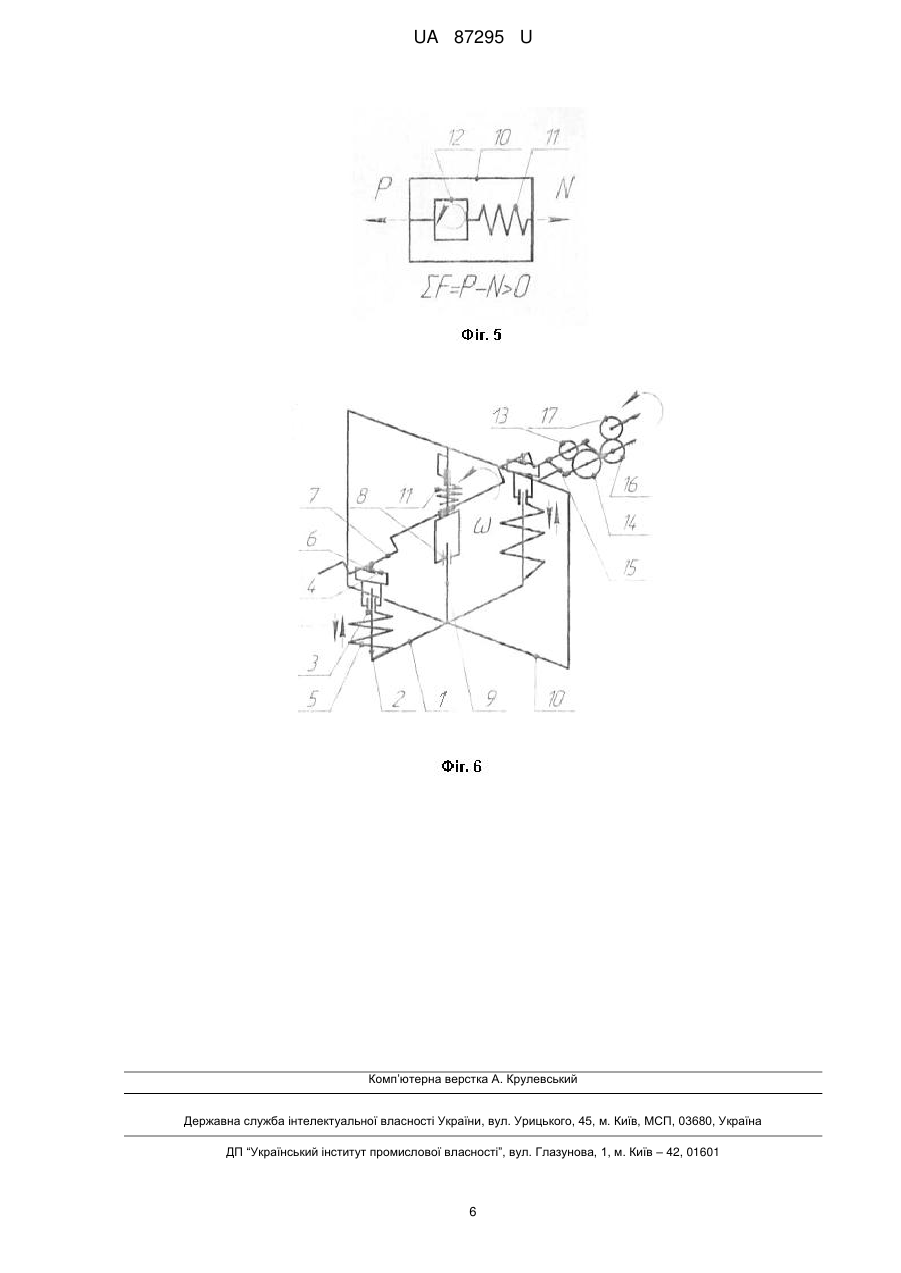
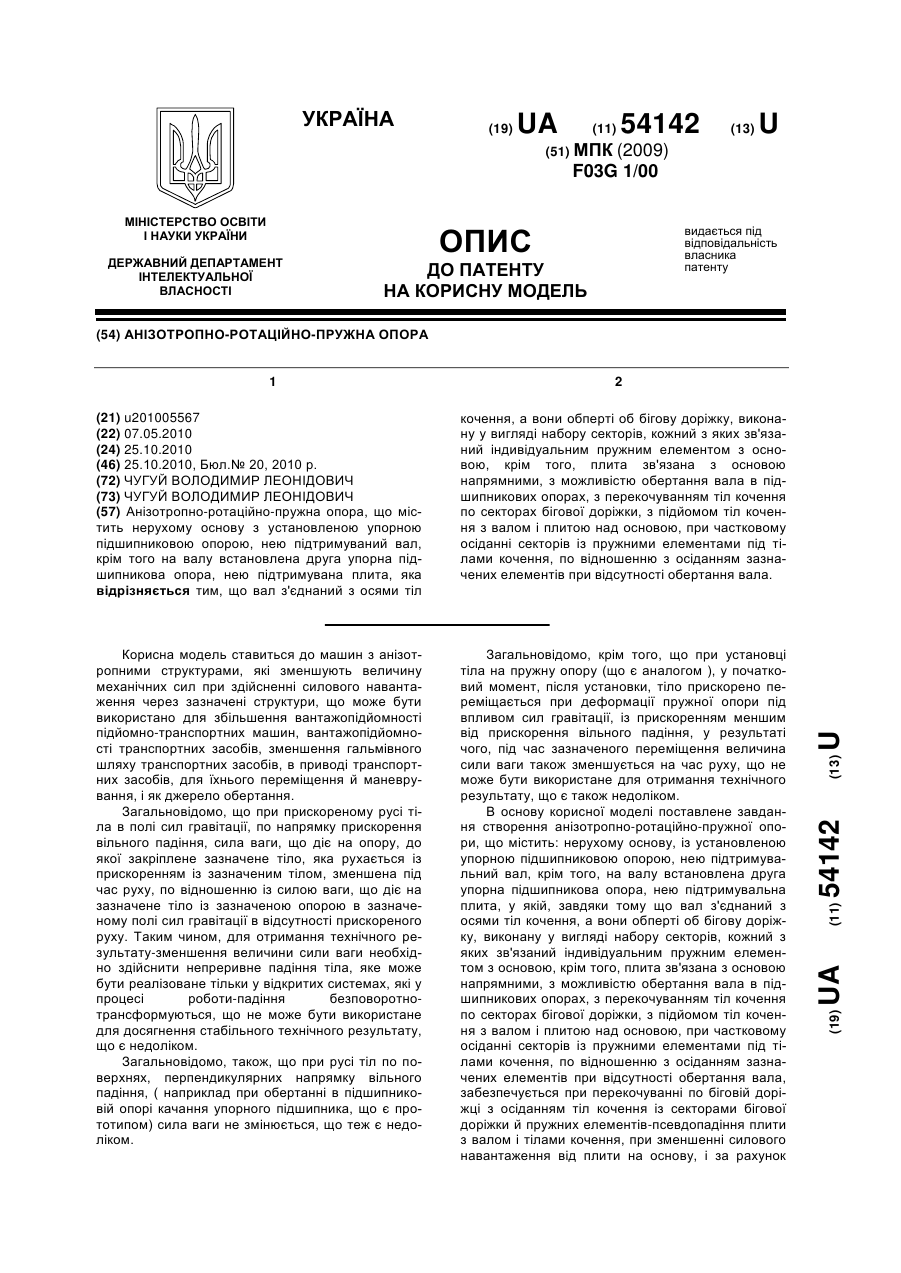
Реферат: UA 87295 U UA 87295 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до силових конверторів, які перетворюють статичну пару притискних сил у динамічну силу, і вона може бути використана для одержання обертаючих сил і їх використання як джерела обертання, для одержання сил тяги і їх використання як джерела переміщення та левітації транспортних засобів, а також і для збільшення вантажопідйомності існуючих транспортних засобів (сухопутних, водних, повітряних, космічних). Загальновідомі механічні ізотропні системи, у яких є однакові механічні силові закономірності у різних напрямках, зокрема при навантаженні системи ізотропних елементів двома однаковими стискаючими силами, направленими по одній прямій у протилежні сторони рівнодіюча стискаючих сил рівної нулю, прикладом яких є всі існуючі механізми та машини в стаціонарному положенні, а також у динамічному положенні під час встановленого руху. Недоліком загальновідомих механічних систем з ізотропними елементами є відсутність можливості перетворювати пари статичних сил у динамічну силу. Загальновідомо, що при перемінному в часі механічному впливі на ізотропні елементи, які мають високу податливість і велику інертність, у ній виникають короткочасні перехідні процеси, які викликані силами внутрішнього тертя в елементах розглянутої ізотропної системи, які спричиняють короткочасну появу неврівноважених сил, які властиві анізотропним елементам і системам, але після завершення перехідних процесів неврівноважені сили зникають. Зокрема, при встановленні вантажу на ваги для зважування (які є найближчим аналогом), в які включені нерухома основа, на яку встановлена напрямна, на яку посаджений повзун зв'язаний з навантажувальним елементом - чашкою для вантажів, причому повзун зв'язаний з основою пружним елементом, і в процесі зважування спостережена короткочасна коливальна зміна величини показань вагів до закінчення перехідних процесів, після чого значення показань стабілізуються. Таким чином, у системі, елементи якої постійно перебувають у стані перехідних процесів, будуть постійно діяти неврівноважені сили, властиві для анізотропних систем. В основу корисної моделі поставлено задачу створення анізотропно-ротаційної системи, що містить: основу на якій встановлена напрямна, на напрямну посаджений повзун, повзун з'єднаний з навантажувальним елементом, повзун зв'язаний з основою пружним елементом, навантажувальний елемент виконаний у вигляді другої напрямної, вісь другої напрямної розташована в нормальній площині до осі першої напрямної, на другу напрямну посаджений другий повзун, другий повзун шарнірно зв'язаний із шатунною шийкою кривошипного вала, у якому корінна опора кривошипного вала з'єднана з третім повзуном, третій повзун посаджений на третю напрямну, вісь третьої напрямної паралельна осі першої напрямної та третя напрямна з'єднана з основою, причому застосовано дві перші напрямні, на кожну першу напрямну посаджене по індивідуальному першому повзуну, зв'язаному своїм індивідуальним пружним елементом із спільною основою та зв'язаною з індивідуальною другою напрямною, на кожну другу напрямну посаджений другий індивідуальний повзун, шарнірно зв'язаний із своєю індивідуальною шатунною шийкою єдиного кривошипного вала, при цьому друга шатунна шийка кривошипного вала розташована із протилежної сторони єдиної корінної шийки в протилежному куті щодо кута розташування першої шатунної шийки, з можливістю навантаження опори корінної шийки кривошипного вала, притискними уздовж осі третьої напрямної до основи силами, з осіданням пружних елементів і переміщенням перших повзунів уздовж перших напрямних спільно із другими напрямними та другими повзунами, а також із кривошипним валом і третім повзуном і навантаженням основи від пружних елементів силами, рівними притискними опору корінної шийки до основи силами, з можливістю обертання кривошипного вала навколо осі своєї корінної шийки з рухом третього та других повзунів із другими напрямними та першими повзунами з торцями пружних елементів у напрямку осей перших і третьої напрямних і з виникненням у пружних елементах перехідних процесів з коливальним рухом пружних елементів і пов'язаних з ними елементів, з виникненням у пружних елементах сил внутрішнього тертя із частковим зменшенням осідання пружних елементів і частковим підйомом кривошипного вала із другими повзунами та другими напрямними та частковим зменшенням навантаження основи від пружних елементів, забезпечується при наявності руху пружних елементів, які знаходяться у деформованому положенні, в них виникає внутрішнє тертя, яке змінює силовий баланс, що у свою чергу є причиною появи неврівноважених сил, які властиві анізотропним елементам і системам, і за рахунок цього здійснене перетворення статичної пари притискних сил у динамічну силу, яка використана для одержання обертаючих сил у джерела обертання, для одержання сил тяги та левітації транспортних засобів, для збільшення вантажопідйомності існуючих транспортних засобів (сухопутних, водних, повітряних, космічних). 1 UA 87295 U 5 10 15 20 25 30 35 40 45 50 55 60 Поставлена задача вирішується анізотропно-ротаційною системою, що містить основу на якій встановлена напрямна, на напрямну посаджений повзун, повзун з'єднаний з навантажувальним елементом, повзун зв'язаний з основою пружним елементом, згідно з корисною моделлю, навантажувальний елемент виконаний у вигляді другої напрямної, вісь другої напрямної розташована в нормальній площині до осі першої напрямної, на другу напрямну посаджений другий повзун, другий повзун шарнірно зв'язаний із шатунною шийкою кривошипного вала, у якому корінна опора кривошипного вала з'єднана з третім повзуном, третій повзун посаджений на третю напрямну, вісь третьої напрямної паралельна осі першої напрямної та третя напрямна з'єднана з основою, причому застосовано дві перших напрямні, на кожну першу напрямну посаджене по індивідуальному першому повзуну, пов'язаному своїм індивідуальним пружним елементом із спільною основою та зв'язаною з індивідуальною другою напрямною, на кожну другу напрямну посаджений другий індивідуальний повзун, шарнірнозв'язаний із своєю індивідуальною шатунною шийкою єдиного кривошипного вала, при цьому друга шатунна шийка кривошипного вала розташована із протилежної сторони єдиної корінної шийки в протилежному куті щодо кута розташування першої шатунної шийки, з можливістю навантаження опори корінної шийки кривошипного вала, притискними уздовж осі третьої напрямної до основи силами, з осіданням пружних елементів і переміщенням перших повзунів уздовж перших напрямних спільно із другими напрямними та другими повзунами, а також із кривошипним валом і третім повзуном і навантаженням основи від пружних елементів силами, рівними притискними опору корінної шийки до основи силами, і можливістю обертання кривошипного вала навколо осі своєї корінної шийки з рухом третього та других повзунів із другими напрямними та першими повзунами з торцями пружних елементів у напрямку осей перших і третьої напрямних із виникненням у пружних елементах перехідних процесів з коливальним рухом пружних елементів і пов'язаних з ними елементів, з виникненням у пружних елементах сил внутрішнього тертя із частковим зменшенням осідання пружних елементів і частковим підйомом кривошипного вала із другими повзунами та другими напрямними та частковим зменшенням навантаження основи від пружних елементів. Корисна модель пояснюється графічними матеріалами, у яких на фіг. 1 показано пристрій анізотропно-ротаційного силового конвертора, на фіг. 2 показана діаграма ситових навантажень, що діють в пристрої на фіг. 1, на фіг. 3 показано пристрій анізотропно-ротаційного силового конвертора для одержання сил тяги та левітації, на фіг. 4. фіг . 5 показана схема сил діючих в анізотропно-ротаційному силовому конверторі для одержання сил тяги та левітації, на фіг. 6 показано пристрій анізотропно-ротаційного силового конвертора для одержання обертання. В анізотропно-ротаційний силовий конвертор включені: основа 1, на яку встановлена напрямна 2, на напрямну 2 посаджений повзун 3, з повзуном 3 з'єднаний навантажувальний елемент 4, повзун 3 зв'язаний з основою 1 пружним елементом 5, навантажувальний елемент 4 виконаний у вигляді другої напрямної 4, вісь другої напрямної 4 розташована в нормальній площині до осі першої напрямної 2, на другу напрямну 4 посаджений другий повзун 6, другий повзун 6 шарнірно зв'язаний із шатунною шийкою кривошипного вала 7, в якому корінна опора кривошипного вала 7 з'єднана із третім повзуном 8, третій повзун 8 посаджений на третю напрямну 9, вісь третьої напрямної 9 паралельна осі першої напрямної 2 і третя напрямна 9 з'єднана з основою 1, причому застосовано дві перші напрямні 2, на кожну першу напрямну 2 посаджене по індивідуальному першому повзуну 3, зв'язаному своїм індивідуальним пружним елементом 5 із спільною основою 1 і зв'язаною з індивідуальною другою напрямною 4, на кожну другу напрямну 4 посаджений другий індивідуальний повзун 6, шарнірно-зв'язаний із своєю індивідуальною шатунною шийкою єдиного кривошипного вала 7, при цьому друга шатунна шийка кривошипного вала 7 розташована із протилежної сторони єдиної корінної шийки в протилежному куті відносно кута розташування першої шатунної шийки, з можливістю навантаження опори корінної шийки кривошипного вала 7 притискними уздовж осі третьої напрямної 9 до основи 1 силами Р, з осіданням пружних елементів 5 і переміщенням перших повзунів 3 уздовж перших напрямних 2 спільно із другими напрямними 4 та другими повзунами 6, а також із кривошипним валом 7 і третім повзуном 8 і навантаженням основи 1 підпружних елементів - 5 силами N, рівними притискними опору корінної шийки до основи 1 силами Р, з можливістю обертання кривошипного вала 7 навколо осі своєї корінної шийки з рухом третього 8 та, других 4 повзунів із другими напрямними 6 та першими повзунами - з торцями пружних елементів 5 у напрямку осей перших 2 і третьої 8 напрямних і з виникненням у пружних елементах 5 сил внутрішнього тертя із частковим зменшенням осідання пружних елементів 5 і частковим підйомом кривошипного вала 7 із другими повзунами 6 та другими напрямними 4 та частковим зменшенням навантаження основи 1 підпружних елементів 5. 2 UA 87295 U 5 10 15 20 25 30 35 40 45 50 55 Анізотропно-ротаційний силовий конвертор працює наступним чином. У вихідному положенні все нерухомо і притискні сили Р відсутні. При навантаженні опори корінної шийки кривошипного вала 7 притискною силою Р, направленою уздовж осі третьої напрямної 9 до основи 1 при відсутності обертання кривошипного вала 7 відбувається осідання пружних елементів 5 із переміщенням елементів 3, 4, 6, 7, 8 до основи 1. При обертанні кривошипного вала 7 навколо осі своєї корінної шийки в пружних елементах 5 спостерігаються перехідні процеси, пов'язані з рухом витків пружних елементів 5, у яких виникають сили внутрішнього тертя, які на час руху витків пружних елементів 5 частково зменшують силові навантаження N від опори корінної шийки кривошипного вала 7 до основи 1. При цьому відбувається частковий підйом пружних елементів 5 і пов'язаних з їхніми торцями елементів 3, 4, 6, 7, 8. При цьому при збільшенні кутової швидкості обертання кривошипного вала 7 інтенсивність динамічних перехідних процесів зростає, що збільшує швидкості руху витків пружних елементів 5 і внутрішнє тертя, що зменшує осадку пружних елементів 5 і підйом пов'язаних з торцями пружних елементів 5 елементів 3, 4, 6, 7, 8. На фіг. 2 показана діаграма сил, діючих в анізотропно-ротаційному силовому конверторі за фіг. 1. Тут лінією Р показана величина діючого навантаження Р на опору корінної шийки кривошипного вала 7, а лінією N показана величина діючого на основу 1 навантаження N. При цьому в початковий момент обертання кривошипного вала 7 відсутнє, а потім обертання на кривошипний вал 7 подане. Анізотропно-ротаційний силовий конвертор за фіг. 1 може бути використаний у підвісках вантажів на існуючих транспортник засобах, то збільшить вантажопідйомність існуючих транспортних засобів: сухопутних, водних, повітряних, космічних. На фіг. 3 показане використання анізотропно-ротаційного силового конвертора для одержання сил тяги та левітації. Тут основа - 1 з'єднана з рамою 10, усередині якої розташовані елементи 1, 2, 3, 4, 5, 6, 7, 8, 9, а також опора корінної шийки кривошипного вала 7 з'єднана пружним елементом 1 з рамою 10, при цьому у пружному елементі більша жорсткість відносно до жорсткості двох пружних елементів 5, та у пружних елементів 5, 11 є початкове осідання, що спричиняє навантаження рами 10 силами Р, N від деформованих пружних елементів 5, 11. Анізотропно-ротаційний силовий конвертор для одержання сил тяги та левітації працює наступним чином. У вихідному положенні обертання кривошипного вала 7 відсутня і система за фіг. 3 перебуває в урівноваженому положенні, при якому пружний елемент 11 разом із пружними елементами 5 деформовані та в них виникаючими силами Р, N пружності навантажена рама 10. При подачі обертання на кривошипний вал 7 пружні елементи 5, 11 рухаються, перебуваючи у коливальному русі, але тому що у пружних елементах 5 внаслідок меншої жорсткості при руху шатунних шийок рухаються інтенсивніше, ніж пружний елемент 11, осідання пружних елементів 5 зменшується разом з силовими навантаженнями N, а осідання пружного елемента 11 збільшується разом з силовими навантаженнями Р. Це спричиняє річні силові навантаження на протилежні стінки рами 10, що спричиняє появу векторної суми сил F, відмінною від нуля. На фіг. 4 показана схемасил, діючих у системі за фіг. 3 при відсутності обертання, тут умовно показані: пружний елемент 11, рама 10, і анізотропний силовий конвертор 12. Тут величини сил Р та N рівні і величина векторних сил F дорівнює нулю. На фіг. 5 показана схема сил при подачі обертання, тут величини Р і N різні внаслідок дії сил внутрішнього тертя в пружних елементах 5, і векторна сума сил F більше нуля. Анізотропно-ротаційний силовий конвертор по фіг. 3 може бути використаний для одержання сил тяги і їх використання як джерела переміщення та левітації транспортних засобів: сухопутних, для збільшення прохідності, водних для підвищення надійності приводу, повітряних і космічних для приводу та левітації. На фіг. 6 показано пристрій Анізотропно-ротаційного силового конвертора для одержання обертання. Тут Анізотропно-ротаційний силовий конвертор з елементами 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, у якому кривошипний вал 7 з'єднаний із шестірнею 13, яка зачеплена з нерухомим колесом 14 і водило 15, крім того, водило 15 з'єднано з шестірнею 16, яка пов'язана з колесом 17, яке відповідне виходу джерела обертання. Анізотропно-ротаційний силовий конвертор для одержання обертання працює в такий спосіб. При відсутності обертання система врівноважена на величини сил Р і N рівні і величина векторних сил F дорівнює нулю. При подачі обертання на кривошипний вал 7 пружні елементи 5 зменшують своє осідання, при цьому осідання пружного елемента 11 збільшується. Це спричиняє різні силові навантаження на протилежні стінки рами 10, що спричиняє появу векторної суми навантажуючих сил F, відмінною від нуля, лінія дії якої направлена 3 UA 87295 U 5 10 ексцентрично осі колеса 14, що у свою чергу спричиняє обертання рами 10 з елементами 1, 2, 3, 4, 5, 6, 7, 8, 11, 13, 15, 16, передане колесу 17. Анізотропно-ротаційний силовий конвертор для одержанні обертання може бути використаний як автономне джерело обертання в річних пристроях. Техніко-економічний ефект від використання Анізотропно-ротаційної системи полягає в використанні сил внутрішнього тертя, що виникають під час руху пружних елементів, чим розширені технічні можливості важільно-повзункових механізмів з наявністю пружних елементів, що може бути використане для одержання обертаючих сил і їх використання як джерела обертання, і для одержання сил тяги і їх використання як джерела переміщення та левітації транспортних засобів, а також і для збільшення вантажопідйомності існуючих транспортних засобів (сухопутних, водних, повітряних, космічних). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 Анізотропно-ротаційна система, що містить основу, на якій встановлена напрямна, на напрямну посаджений повзун, повзун з'єднаний з навантажувальним елементом, повзун зв'язаний з основою пружним елементом, яка відрізняється тим, що навантажувальний елемент виконаний у вигляді другої напрямної, вісь другої напрямної розташована в нормальній площині до осі першої напрямної, на другу напрямну посаджений другий повзун, другий повзун шарнірно зв'язаний із шатунною шийкою кривошипного вала, у якому корінна опора кривошипного вала з'єднана з третім повзуном, третій повзун посаджений на третю напрямну, вісь третьої напрямної паралельна осі першої напрямної та третя напрямна з'єднана з основою, причому застосовано дві перших напрямні, на кожну першу напрямну посаджене по індивідуальному першому повзуну, зв'язаному своїм індивідуальним пружним елементом із спільною основою та пов'язаною з індивідуальною другою напрямною, на кожну другу напрямну посаджений другий індивідуальний повзун, шарнірно-пов'язаний із своєю індивідуальною шатунною шийкою єдиного кривошипного вала, при цьому друга шатунна шийка кривошипного вала розташована із протилежної сторони єдиної корінної шийки в протилежному куті щодо кута розташування першої шатунної шийки, з можливістю навантаження опори корінної шийки кривошипного вала, притискними уздовж осі третьої напрямної до основи силами, з осіданням пружних елементів і переміщенням перших повзунів уздовж перших напрямних спільно із другими напрямними та другими повзунами, а також із кривошипним валом і третім повзуном і навантаженням основи від пружних елементів силами, рівними притискними опору корінної шийки до основи силами, з можливістю обертання кривошипного вала навколо осі своєї корінної шийки з рухом третього та других повзунів із другими напрямними та першими повзунами з торцями пружних елементів у напрямку осей перших і третьої напрямних і з виникненням у пружних елементах перехідних процесів з коливальним рухом пружних елементів і зв'язаних з ними елементів, з виникненням у пружних елементах сил внутрішнього тертя із частковим зменшенням осідання пружних елементів і частковим підйомом кривошипного вала із другими повзунами та другими напрямними та частковим зменшенням навантаження основи від пружних елементів. 4 UA 87295 U 5 UA 87295 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюChuhui Volodymyr Leonidovych
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F03G 1/00
Мітки: анізотропно-ротаційна, система
Код посилання
<a href="https://ua.patents.su/8-87295-anizotropno-rotacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Анізотропно-ротаційна система</a>
Анізотропно-ротаційно-пружна опора
Номер патенту: 54142
Опубліковано: 25.10.2010
Автор: Чугуй Володимир Леонідович
МПК: F03G 1/00
Мітки: анізотропно-ротаційно-пружна, опора
Формула / Реферат:
Анізотропно-ротаційно-пружна опора, що містить нерухому основу з установленою упорною підшипниковою опорою, нею підтримуваний вал, крім того на валу встановлена друга упорна підшипникова опора, нею підтримувана плита, яка відрізняється тим, що вал з'єднаний з осями тіл кочення, а вони обперті об бігову доріжку, виконану у вигляді набору секторів, кожний з яких зв'язаний індивідуальним пружним елементом з основою, крім того, плита зв'язана з...
Ротаційна косарка
Номер патенту: 79309
Опубліковано: 25.04.2013
Автор: Малюта Сергій Іванович
МПК: A01D 34/83
Формула / Реферат:
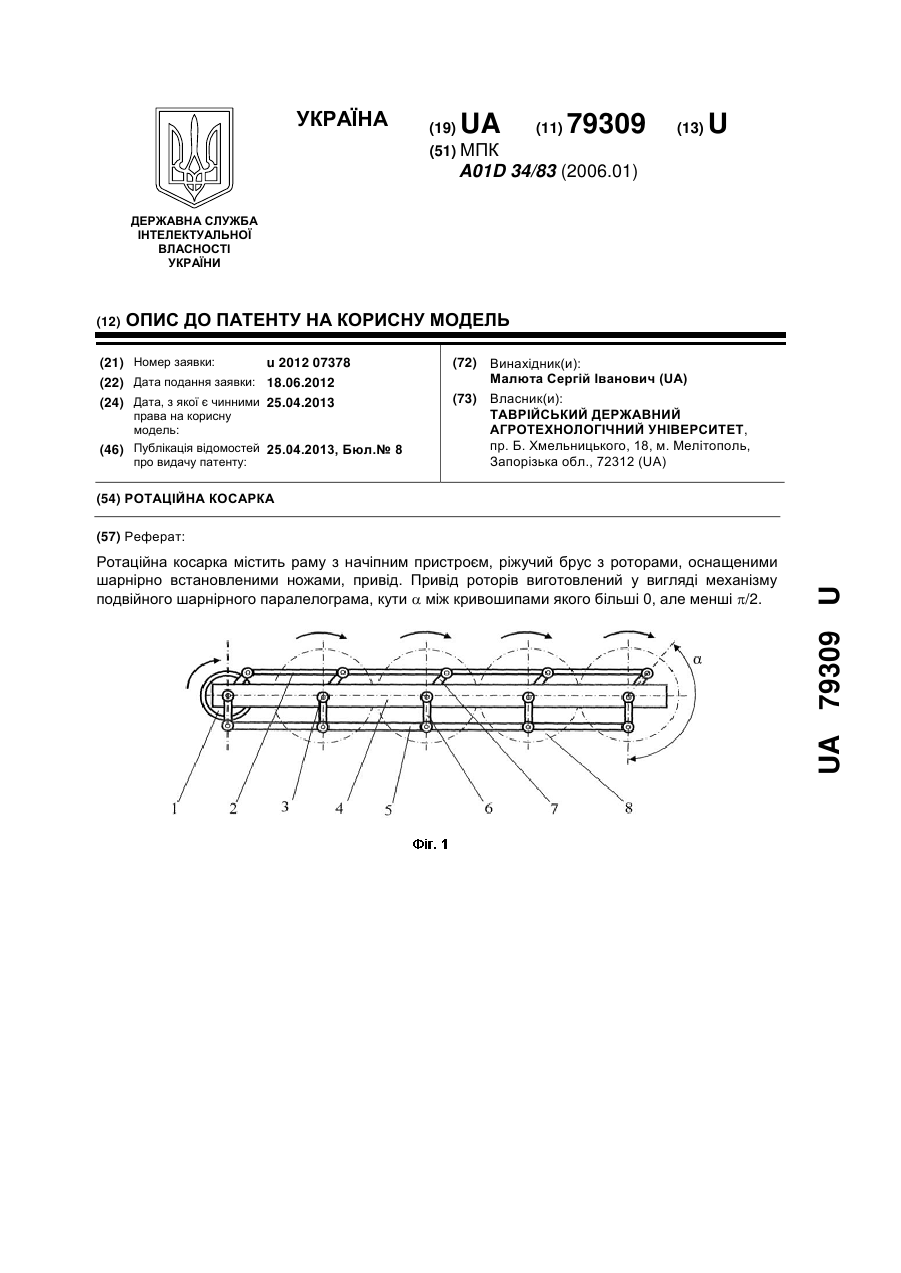
Ротаційна косарка, що містить раму з начіпним пристроєм, ріжучий брус з роторами, оснащеними шарнірно встановленими ножами, привід, яка відрізняється тим, що привід роторів виготовлений у вигляді механізму подвійного шарнірного паралелограма, кути a між кривошипами якого більші 0, але менші p/2.
Косарка ротаційна
Номер патенту: 72805
Опубліковано: 15.04.2005
Автори: Хромих Геннадій Георгійович, Кузьменко Володимир Федорович
МПК: A01D 34/00
Формула / Реферат:
1. Косарка ротаційна, що включає загальний привід, корпус, на якому встановлені ротор (ротори) з диском, різальні шарнірні ножі, а також опорну тарілку, яка відрізняється тим, що шарнірні різальні ножі розташовані на додатковому диску з індивідуальним приводом, при цьому транспортуючий скошену масу ротор з диском має також самостійний привід, який зв’язаний з загальним приводом косарки.2. Косарка ротаційна за п. 1, яка відрізняється...
Косарка ротаційна
Номер патенту: 78370
Опубліковано: 15.03.2007
Автори: Погорілець Олександр Миколайович, Майданович Віктор Сергійович, Борисенко Василь Анатолійович
МПК: A01D 34/63, A01D 34/00
Формула / Реферат:
1. Косарка ротаційна, яка містить два або більше циліндрично-конічні барабани з шарнірно закріпленими ножами, з попарним обертанням назустріч один одному, яка відрізняється тим, що всередині барабана розміщені в два яруси пальці, шарнірно закріплені на колінчастій осі, ексцентрично розміщеній осі обертання барабана, і вільно пропущені через повзуни, що шарнірно закріплені на стінках барабана.2. Косарка ротаційна за п. 1, яка...
Ротаційна косарка

Номер патенту: 44681
Опубліковано: 15.06.2004
Автор: Ворона Анатолій Павлович
МПК: A01D 34/63
Формула / Реферат:
1. Ротаційна косарка, яка містить раму з поворотним кронштейном, який шарнірно з'єднаний з ротаційним різальним апаратом, на рамі якого знаходиться механізм передачі роторам, що складається із карданного вала, ведучого шківа, клинопасової передачі, конічного редуктора, який має розподільний вал, яка відрізняється тим, що привід роторів має основний розподільний шків, який з'єднаний із шківами роторів гнучким елементом, причому гнучкий елемент...
Попередній патент: Диференціальний кінематичний варіатор
Наступний патент: Спосіб одержання похідних 1-алкіл (арил)- 1н-тетразол-5-тіолу
Випадковий патент: Гідравлічний пристрій для викопування дерев (варіанти)