Диференціальний кінематичний варіатор
Формула / Реферат
Диференціальний кінематичний варіатор, що містить диференціал у складі першого плеча, яке підшипниковими вузлами встановлене в корпусі, яке зачеплено із двома сателітами, сателіти у свою чергу своїми підшипниковими вузлами встановлені в корпусі по осі, розташованій під кутом, відмінним від нуля до осі першого плеча, і сателіти зачеплені з другим плечем, які також встановлені у корпусі по осі з першим плечем, з можливістю вільного обертання другого плеча відносно першого плеча, з перекочуванням сателітів по першому плечу та обертанням корпусу, який відрізняється тим, що перше плече посаджене на вхідний вал, пропущений через друге плече назовні корпусу, друге плече встановлене у підшипникові вузли вхідного вала, крім того друге плече виведене з корпусу та на нього посаджена шестірня, яка зачеплена з одним вінцем блок-шестірні, другий вінець блок-шестірні зачеплений з колесом, яке встановлено по осі плечей і з'єднане з корпусом-виходом, при цьому вісь блок-шестірні з'єднана із вхідним валом водилом, з можливістю цільного обертання (вибігу) корпусу із взаємозалежним, через шестірню, блок-шестірню, колесо, обертанням другого плеча та перекочуванням сателітів, по першому плечу (у відносному обертанні), і з можливістю одночасного примусового обертання, у вигляді наборів імпульсів вхідного вала (розбігу) з обертанням першого плеча спільно із другим плечем, із сателітами та корпусом, а також з водилом із шестірнею, із блок-шестірнею та з колесом як єдине ціле (у переносному обертанні), при зростанні швидкості корпусу від підсумовування швидкостей постійного відносною обертання корпусу з кожним окремо імпульсом швидкості переносного обертання вхідного вала в абсолютному обертанні корпусу.
Текст
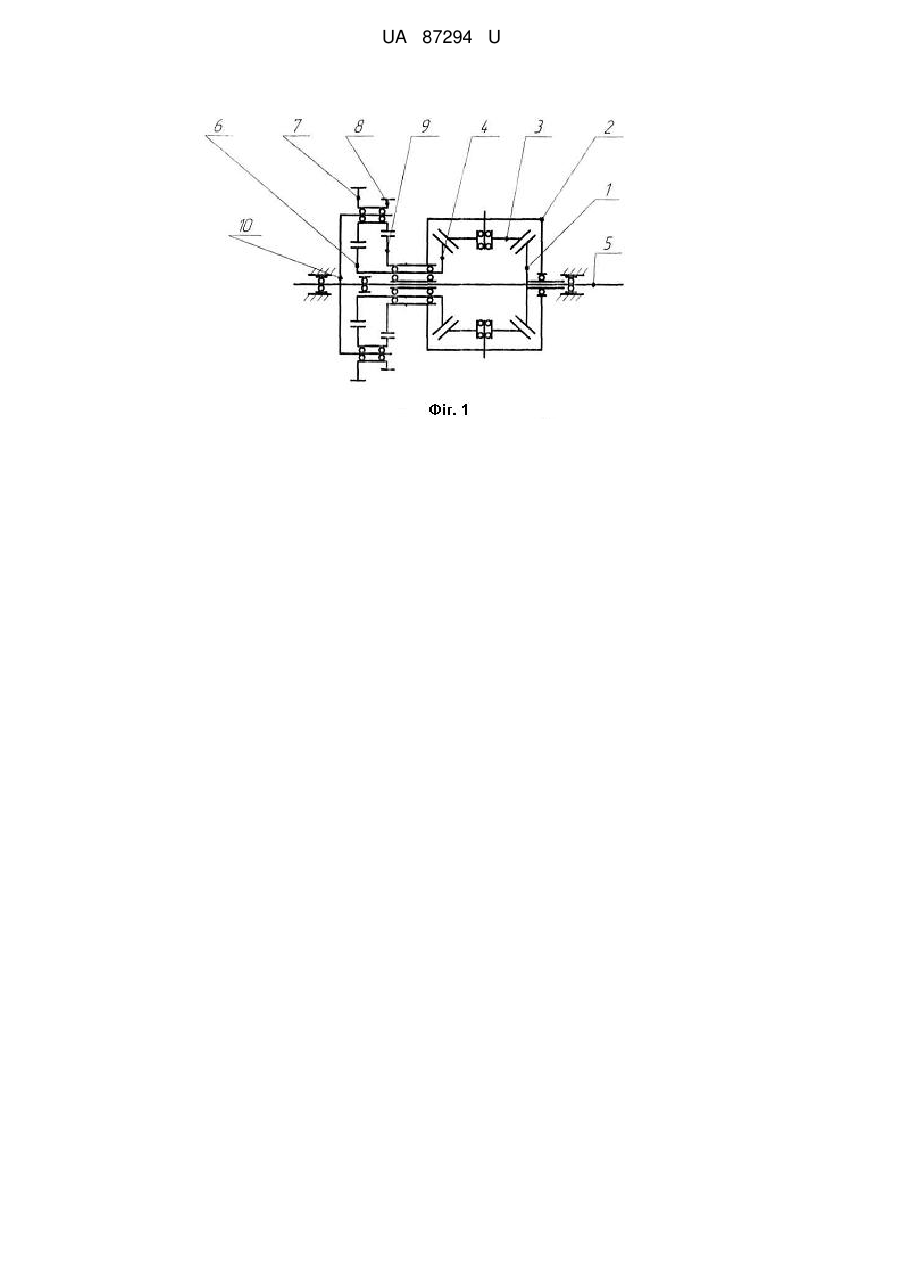
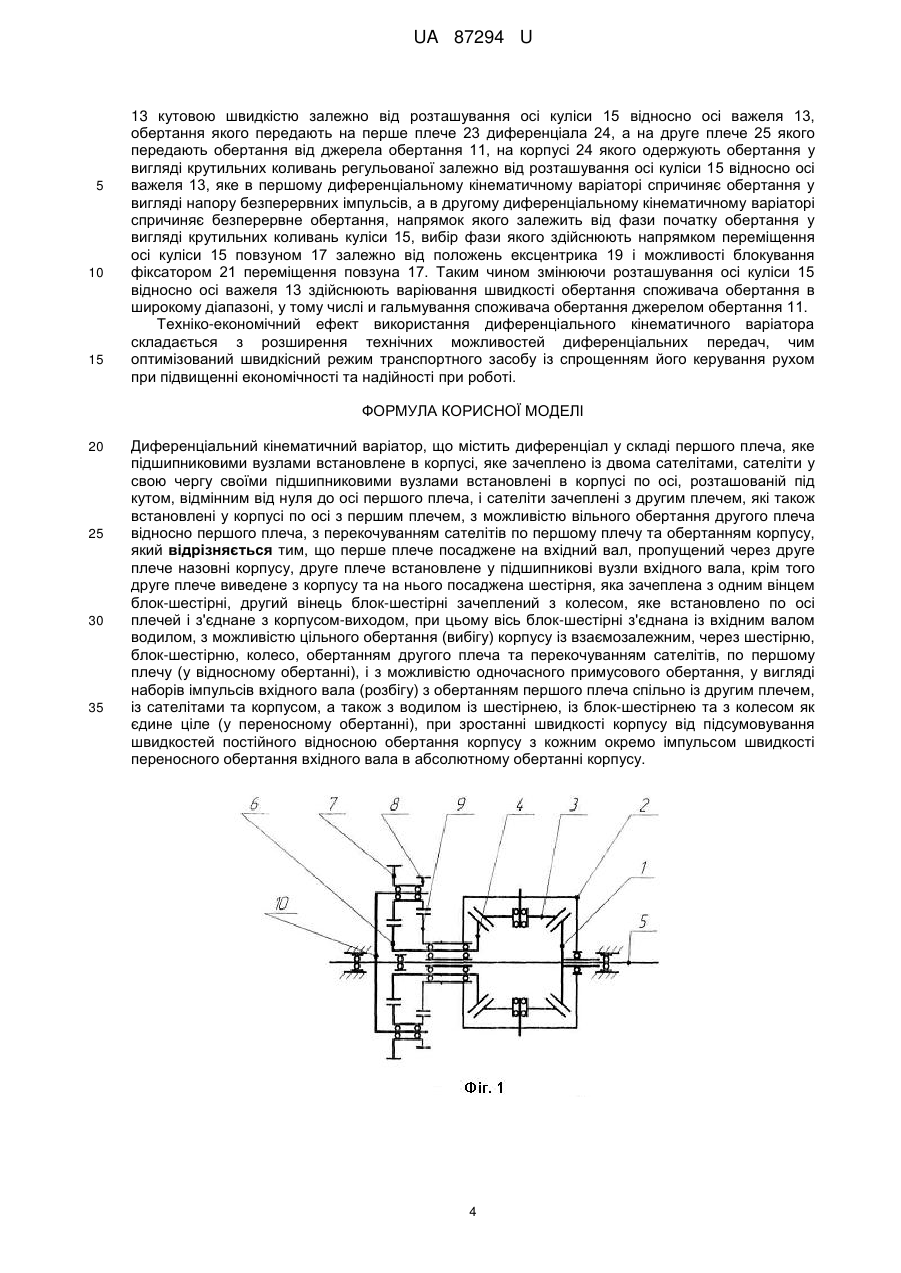
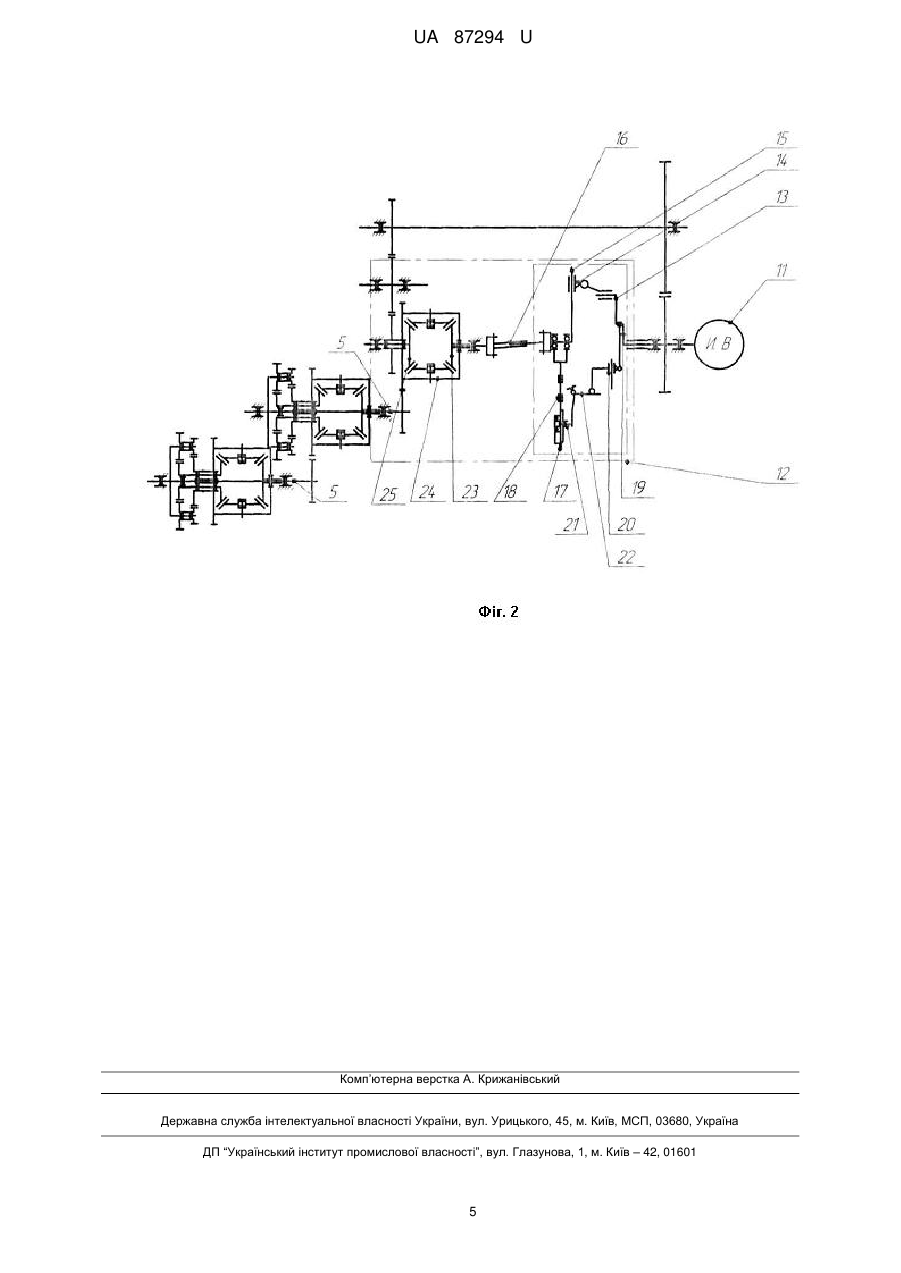
Реферат: UA 87294 U UA 87294 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до планетарних зубчатих передач, і вона може бути використана в приводі сухопутних транспортних засобів: велосипеда, мотоцикла, квадрацикла, автомобіля, для плавної зміни швидкості руху. Загальновідомі кінематичні зубчаті передачі, у яких є кінематичні зубчаті елементи, зокрема ведучий і ведений, на робочих (зовнішніх або внутрішніх) поверхнях яких розташовані зуби, якими зачеплені ведучий з веденим кінематичні зубчаті елементи, і при обертанні ведучого, зубчатого кінематичного елемента його зуби обертаються разом з ним як єдине ціле, які поперемінно входять і виходять у зачеплення із зубами веденого кінематичного елемента, і у свою чергу зуби веденого елемента також поперемінно входять і виходять із зачеплення, рухаючись погоджено із зубами ведучого елемента, і зуби веденого кінематичного елемента обертаються разом з веденим кінематичним елементом як інше єдине ціле, передаючи обертання від ведучого веденому кінематичними елементами. При цьому крок зубів як ведучого, так і веденого кінематичних елементів повинен бути однаковий, для здійснення їх взаємного зачеплення, і при цьому, число зубів на кінематичних елементах повинне бути цілим числом. Загальновідомі фрикційні варіатори, у яких немає зубів, а їх взаємний контакт здійснюється перекочуванням ведучого елемента по веденому елементу без проковзування, у яких реалізована можливість варіювання кутової швидкості за рахунок зміни діаметра одного фрикційного елемента по відношенню до діаметра іншого фрикційного елемента. Таким чином, з погляду законів збереження фізики, немає обмежень для варіювання кутовою швидкістю обертання як фрикційної передачі так і кінематичної передачі, але з погляду геометрії зачеплення (розділу математики). неможливо здійснити варіювання швидкості обертання в кінематичної передачі, тому що при зміні діаметра одного кінематичного зубчатого елемента по відношенню до іншого змінюється крок розташування зубів, то унеможливить зачеплення з іншим кінематичним елементом, крок зубів якого буде невідповідним, а при взаємоузгодженні зміни діаметрів і кроків здійсниться масштабування кінематичних елементів, яке не спричинить варіювання кутової швидкості, Загальновідомі диференціальні зубчаті кінематичні передачі, у яких здійснюється підсумовування швидкостей двох ведучих ланок зі зміною швидкості вихідної ланки, що може бути використане для варіювання кутової швидкості. Зокрема загальновідомий диференціал, включає перше плече, яке підшипниковими вузлами встановлене в корпусі, і яке зачеплено із двома сателітами, у свою черг) сателіти своїми підшипниковими вузлами встановлені в корпусі по осі, розташованій під кутом відмінним від нуля до осі першого плеча, і сателіти зачеплені із другим плечем, яке також установлене в корпусі по осі з першим плечем, з можливістю вільного обертання другого плеча відносно першого плеча, з перекочуванням сателітів по першому плечу та обертанням корпусу. Загальновідомий диференціал працює в такий спосіб. Тому що загальновідомий диференціал має два ступені (кінематичної) свободи обертання, то при обертанні корпуса (як "традиційне" використання диференціала) плечі із сателітами можуть обертатися в першому варіанті - як єдине ціле, або в другому варіанті - при загальмованому одному із плечей друге плече обертається з подвоєною кутовою швидкістю обертання корпуса, або в третьому варіанті - комбінації першого із другим варіантів) різних пропорціях. Недоліком загальновідомого диференціала є наявність двох ступенів (кінематичної) свободи обертання: корпусу та одного із плечей відносно іншого із плечей, чим обумовлена відсутність можливості варіювання швидкості. В основу корисної моделі поставлена задача створення диференціального кінематичного варіатора, що містить диференціал у складі першого плеча, яке підшипниковими вузлами встановлене в корпусі, і яке зачеплено із двома сателітами, у свою чергу сателіти своїми підшипниковими вузлами встановлені в корпусі по осі, розташованій під кутом, відмінним від нуля до осі першого плеча, і сателіти зачеплені із другим плечем, яке також установлене в корпусі по осі з першим плечем, з можливістю вільного обертання другого плеча відносно першого плеча, з перекочуванням сателітів по першому плечі та обертанням корпусу, у якому завдяки тому, що перше плече посаджене на вхідний вал, пропущений через друге плече назовні корпусу, друге плече встановлене в підшипникові вузли вхідною вала, крім того друге плече виведене з корпусу та на нього посаджена шестірня, яка зачеплена з одним вінцем блокшестірні, другий вінець блок-шестірні зачеплений з колесом, яке встановлено по осі плечей і з'єднане з корпусом-виходом, при цьому вісь блок-шестірні з'єднана із вхідним валом водилом, з можливістю вільного обертання (вибігу) корпусу із взаємозалежним, через шестірню, блокшестірню, колесо, обертанням другого плеча та перекочуванням сателітів, по першому плечу (у відносному обертанні) і з можливістю одночасного примусового обертання, у вигляді наборів 1 UA 87294 U 5 10 15 20 25 30 35 40 45 50 55 60 імпульсів, вхідного вала (розбігу) з обертанням першого плеча спільно із другим плечем, із сателітами та корпусом, а також з водилом з шестірнею, із блок-шестірнею та з колесом як єдине ціле (у переносному обертанні), при зростанні швидкості корпусу від підсумовування швидкостей постійного відносного обертання корпусу з кожним окремо імпульсом швидкості переносного обертання вхідною вала в абсолютному обертанні корпусу, забезпечується кінематичне замикання одного із двох ступенів кінематичної свободи обертання з одержанням одного ступеня інерційної свободи обертання корпусу відносно першого плеча, при збереженні можливості підсумовування обертань: наявного підносного обертання корпусу відносно першого плеча, з новим, у вигляді набору імпульсів, обертанням першого плеча в абсолютному обертанні корпусу, і за рахунок цього при імпульсній регульованій подачі обертання здійснене варіювання швидкості обертання, чим розширені технічні можливості диференціальних передач і підвищена ефективність використання джерела обертання, а також ефективність використання транспортного засобу. Поставлена задача вирішується диференціальним кінематичним варіатором, що містить диференціал у складі першою плеча, яке підшипниковими вузлами встановлене в корпусі, і яке зачеплено із двома сателітами, у свою чергу сателіти своїми підшипниковими вузлами встановлені в корпусі по осі, розташованій під кутом, відмінним від нуля до осі першого плеча, і сателіти зачеплені із другим плечем, яке також установлене в корпусі по осі з першим плечем, з можливістю вільного обертання другого плеча відносно першого плеча, с перекочуванням сателітів по першому плечу та обертанням корпусу, у якому відповідно з корисною моделлю, перше плече посаджене па вхідний вал, пропущений через друге плече назовні корпусу, друге плече встановлене в підшипникові вузли вхідного вала, крім того друге плече виведене з корпусу та па нього посаджена шестірня, яка зачеплена з одним вінцем блок-шестірні, другий вінець блок-шестірні зачеплений з колесом, яке встановлено по осі плечей і з'єднане з корпусом-виходом, при цьому вісь блок-шестірні з'єднана із вхідним валом водила, з можливістю вільного обертання (вибігу) корпуса із взаємозалежним, через шестірню, блокшестірню, колесо, обертанням другого плеча та перекочуванням сателітів, по першому плечу (в відносному обертанні), і з можливістю одночасного примусового обертання, у вигляді наборів імпульсів, вхідного вала (розбігу) з обертанням першою плеча спільно із другим плечем, із сателітами та корпусом, а також з водилом із шестірнею, з блок-шестірнею та з колесом як єдине ціле (у переносному обертанні),при зростанні швидкості корпусу від підсумовування швидкостей постійного відносного обертання корпусу з кожним окремо імпульсом швидкості переносного обертання вхідного вала в абсолютному обертанні корпусу. Корисна модель пояснюється графічними матеріалами, у яких показано на Фіг. 1 диференціальний кінематичний варіатор, на Фіг. 2 - установка диференціального кінематичного варіатора. У диференціальний кінематичний варіатор (див. Фіг. 1) включені: перше плече 1, яке підшипниковими вузлами встановлене в корпусі 2 і перше плече 1, зачеплене із двома сателітами 3, у свою чергу сателіти 3 своїми підшипниковими вузлами встановлені в корпусі 2 по осі, розташованій під кутом, відмінним від нуля до осі першого плеча 1, і сателіти 3 зачеплені із другим плечем 4, яке також установлене в корпусі 2 по осі і першим плечем 1, з можливістю вільного обертання другого плеча 4 відносно першого плеча 1, з перекочуванням сателітів-3 по першому плечу 1 і обертанням корпусу 2, перше плече 1 посаджене на вхідний вал 5, пропущений через друге плече 4 назовні корпусу 2 і друге плече 4 установлене в підшипникові вузли вхідного вала 5, крім того друге плече 4 виведене з корпусу 2 і на нього посаджена шестірня 6, яка зачеплена з одним вінцем 7 блок-шестірні 7, 8, другий кінець 8 блок-шестірні 7 зачеплений з колесом 9, яке встановлено по осі плечей 1,4 і з'єднане з корпусом 2 виходом, при цьому вісь блок-шестірні - 7, 8 з'єднана із вхідним валом 5 водилом 10, з можливістю вільного обертання (вибігу) корпусу 2 із взаємозалежним, через шестірню 6, блок-шестірню 7, 8 колесо 9, обертанням другого плеча 4 і перекочуванням сателітів 3, по першому плечу 1 (у відносному обертанні), і з можливістю одночасного примусовою обертання, у вигляді наборів імпульсів, вхідного вала 5 (розбігу) з обертанням першого плеча 1 спільно із другим плечем 4, із сателітами 3 і корпусом 2, а також з водилом 10 із шестірнею 6, із блок-шестірнею 7, 8 і з колесом 9 як єдине ціле (у переносному обертанні), при зростанні швидкості корпуса 2 від підсумовуванні швидкостей постійного відносного обертання корпуса 2 з кожним окремо імпульсом швидкості переносного обертання вхідного вала 5 в абсолютному обертанні корпусу 2. Диференціальний кінематичний варіатор працює в такий спосіб. У диференціального кінематичного варіатора здійснене кінематичне замикання елементами 5, 6, 7, 8, 9,10, одного (плеча 4) з, раніше булих двох (плеча 1 і плеча 4) ступенів кінематичної свободи обертання 2 UA 87294 U 5 10 15 20 25 30 35 40 45 50 55 60 елементів 1, 2, 3, 4 з одержанням одного (плеча 1) кінематичного ступеня свободи обертання першого характеру незалежного руху, і одного (плеча 4) ступеня інерційної свободи обертання відносно плеча 1 - другого незалежного характеру руху, при збереженні можливості підсумовування швидкостей па корпусі 2 двох рухів - третього залежного характеру руху. При початковому обертанні вхідного вала 5 елементи: вхідний вал 5, перше плече 1, сателіти 3, друге плече 4, корпус 2, шестірня 6, блок-шестірня 7, 8, колесо 9, водило 10 обертаються як єдине ціле та корпус 2 одержує початкову швидкість переносного обертання, і руху корпусу 2 відповідає певний рівень кінетичної енергії елементів 1, 2, 3, 4, 5, 6, 7, 8, 9,10 у якості реалізації першого характеру незалежного руху кінематичної свободи обертання. При зупинці обертання вхідного вала 5 корпус 2 буде продовжує обсіпатися по інерції у відносному рухів зі збільшеною швидкістю обертання, відповідної до енергії елементів, що обертаються.-2, 3, 4, 6, 7.8, 9 при збереженні величини наявної кінетичної енергії зазначених елементів 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 і пов'язаного з ним споживача обертання відносно нерухомого вхідного вала 5, здійснюючи вибіг у відносному обертанні, як реалізації другого незалежного характеру руху інерційного ступеня свободи обертання. При новому обертанні вхідного вала 5 у напрямку вибігу корпусу 2 у якості повторної реалізації першого характеру незалежного руху кінематичної свободи обертання, при величині швидкості корпусу 2 більшої нуля як реалізації другого незалежного характеру руху інерційної свободи обертання здійснена реалізація третього залежного характеру руху підсумовуванні обертань: наявного відносного вільного обертання (вибігу) корпусу 2 і нового примусового переносного обертання вхідного вала 5 (розбігу) при підсумовуванні швидкостей постійного відносного обертання корпусу 2 відносно першого плеча 1 з імпульсом швидкості переносного обертання вхідного вала 5 в абсолютному обертанні корпусу 2, при підсумовуванні наявної енергії відносного обертання корпусу 2 з елементами 2, 3, 4, 6, 7,8, 9 відносно нерухомого вхідного вала 5 з енергією переносного обертання вхідного вала 5 разом з виходом 2 і елементами 1, 3, 6, 7, 8, 9, 10, у результаті чого кінетична енергія елементів 1, 2, 3, 4, 5, 6, 7, 8, 9,10 збільшується, як і кутова швидкість корпусу 2 виходу, в якості реалізації підсумовування рухів. При обертанні вхідного вала 5 у режимі набору імпульсів здійснюється збільшення кутової швидкості обертового руху, направленої убік швидкості руху вибігу, яка буде зростати необмежено. При напрямку швидкості обертового руху в протилежному напрямку від напрямку початкової швидкості обертового руху вибігу, величина швидкості обертовою руху буде зменшуватися до пуля і при досягненні нульової величини стане зростати, але буде направлена в протилежну сторону початкової швидкості обертового руху. Диференціальний кінематичний варіатор може бути використаний на велосипеді для варіювання швидкісного режиму руху велосипеда, з використанням маси велосипеда і велосипедистом як маховика для своєї роботи, при регульованій велосипедистом подачі обертання у вигляді набору імпульсів обертання. У результаті використання диференціального кінематичного варіатора велосипед буде рухатися з варійованою залежно від дорожніх умов швидкістю, що в максимальному ступені використає енергетичні можливості джерела обертання - ніг велосипедиста для руху з найбільш оптимальною з енергетичної точки зору швидкістю. Для використання диференціального кінематичного варіатора на транспортному засобі з механічним джерелом обертання, що має постійну величину кутової швидкості вихідного вала, необхідно використати установку диференціального кінематичного варіатора (див. Фіг. 2), що містить: механічне джерело обертання 11, інверторний генератор імпульсного обертання 12 у складі: кулісно-важільного механізму з обертовою кулісою у складі: важеля 13, шарнірно пов'язаного з повзуном 14, який посаджений у кулісу 15, яка зв'язана с карданним валом 16. Переміщення осі обертання куліси 5 здійснюється повзуном 17 по напрямній 18, з можливістю блокування переміщення повзуна 17 по напрямній 18 залежно від фази повороту важеля 13 через ексцентрик 19, встановлений на вал важеля 13, пов'язаного з повзуном 20 із замиканням фіксатора 21 через коромисловий важіль 22 з можливістю переміщення підшипникових вузлів куліси 15 відносно підшипникових вузлів важеля 13. Кінець карданного вала 16 пов'язаний з одним плечем 23 диференціала 24, інше плече 25 диференціала 24 пов'язане із виходом механічного джерела обертання 11 з обертанням другого плеча 25 у протилежному напрямку обертання першого плеча 23, корпус диференціала 24 пов'язаний з вхідним валом 5 диференціального кінематичного варіатора, корпус 2 якою також пов'язаний із вхідним валом 5 другого диференціального кінематичного варіатора. Установка диференціального кінематичного варіатора працює в такий спосіб. Від механічного джерела обертання 11 рівномірно обертають важіль 13 кулісно-важільного механізму з обертовою кулісою і за рахунок переміщення повзуна 14 по кулісі 15 здійснює обертання куліси 15 зі змінюваною в процесі циклу обертання куліси 15 з повзуном 14 і важелем 3 UA 87294 U 5 10 15 13 кутовою швидкістю залежно від розташування осі куліси 15 відносно осі важеля 13, обертання якого передають на перше плече 23 диференціала 24, а на друге плече 25 якого передають обертання від джерела обертання 11, на корпусі 24 якого одержують обертання у вигляді крутильних коливань регульованої залежно від розташування осі куліси 15 відносно осі важеля 13, яке в першому диференціальному кінематичному варіаторі спричиняє обертання у вигляді напору безперервних імпульсів, а в другому диференціальному кінематичному варіаторі спричиняє безперервне обертання, напрямок якого залежить від фази початку обертання у вигляді крутильних коливань куліси 15, вибір фази якого здійснюють напрямком переміщення осі куліси 15 повзуном 17 залежно від положень ексцентрика 19 і можливості блокування фіксатором 21 переміщення повзуна 17. Таким чином змінюючи розташування осі куліси 15 відносно осі важеля 13 здійснюють варіювання швидкості обертання споживача обертання в широкому діапазоні, у тому числі и гальмування споживача обертання джерелом обертання 11. Техніко-економічний ефект використання диференціального кінематичного варіатора складається з розширення технічних можливостей диференціальних передач, чим оптимізований швидкісний режим транспортного засобу із спрощенням його керування рухом при підвищенні економічності та надійності при роботі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Диференціальний кінематичний варіатор, що містить диференціал у складі першого плеча, яке підшипниковими вузлами встановлене в корпусі, яке зачеплено із двома сателітами, сателіти у свою чергу своїми підшипниковими вузлами встановлені в корпусі по осі, розташованій під кутом, відмінним від нуля до осі першого плеча, і сателіти зачеплені з другим плечем, які також встановлені у корпусі по осі з першим плечем, з можливістю вільного обертання другого плеча відносно першого плеча, з перекочуванням сателітів по першому плечу та обертанням корпусу, який відрізняється тим, що перше плече посаджене на вхідний вал, пропущений через друге плече назовні корпусу, друге плече встановлене у підшипникові вузли вхідного вала, крім того друге плече виведене з корпусу та на нього посаджена шестірня, яка зачеплена з одним вінцем блок-шестірні, другий вінець блок-шестірні зачеплений з колесом, яке встановлено по осі плечей і з'єднане з корпусом-виходом, при цьому вісь блок-шестірні з'єднана із вхідним валом водилом, з можливістю цільного обертання (вибігу) корпусу із взаємозалежним, через шестірню, блок-шестірню, колесо, обертанням другого плеча та перекочуванням сателітів, по першому плечу (у відносному обертанні), і з можливістю одночасного примусового обертання, у вигляді наборів імпульсів вхідного вала (розбігу) з обертанням першого плеча спільно із другим плечем, із сателітами та корпусом, а також з водилом із шестірнею, із блок-шестірнею та з колесом як єдине ціле (у переносному обертанні), при зростанні швидкості корпусу від підсумовування швидкостей постійного відносною обертання корпусу з кожним окремо імпульсом швидкості переносного обертання вхідного вала в абсолютному обертанні корпусу. 4 UA 87294 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюChuhui Volodymyr Leonidovych
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F16H 48/00
Мітки: диференціальний, кінематичний, варіатор
Код посилання
<a href="https://ua.patents.su/7-87294-diferencialnijj-kinematichnijj-variator.html" target="_blank" rel="follow" title="База патентів України">Диференціальний кінематичний варіатор</a>
Диференціальний варіатор
Номер патенту: 46052
Опубліковано: 15.05.2002
Автори: ВОЛКОВ МАКСИМ АНАТОЛЬОВИЧ, ВОЛКОВ АНАТОЛІЙ ГРИГОРОВИЧ
МПК: F16H 39/00
Мітки: диференціальний, варіатор
Формула / Реферат:
1. Диференціальний варіатор, який містить в собі диференціальний механізм планетарного типу з одним степенем вільності, який при допомозі сателітів водила веденого вала та проміжної зубчатої передачі взаємозв‘язаний з ведучим валом двигуна внутрішнього згоряння (д.в.з.), який відрізняється тим, що ведений вал взаємозв'язаний з ведучими колесами транспортного засобу, а також при допомозі шарнірно закріплених на водилі веденого вала і...
Варіатор зубчатий диференціальний
Номер патенту: 44774
Опубліковано: 12.10.2009
Автор: Вишневський Георгій Іванович
МПК: F16H 59/00, F16H 9/00, F16H 9/26, F16H 3/44, F16H 3/00
Мітки: варіатор, зубчатий, диференціальний
Формула / Реферат:
1. Варіатор зубчатий диференціальний, що містить щонайменше два диференціали, ведучий і ведений вали, який відрізняється тим, що диференціали з'єднані (замкнені) між собою всіма однойменними ланками (водилами і сонячними колесами), ведучий і ведений вали з'єднані з одним із диференціалів, при цьому з ведучим валом і диференціалом з'єднання здійснюється за допомогою коромисла і важеля з можливістю переміщення останнього вздовж ведучого вала і...
Варіатор “юрків”
Номер патенту: 64788
Опубліковано: 15.03.2004
Автор: Юрків Василь Федорович
МПК: F16H 33/00
Формула / Реферат:
1. Варіатор, який містить вхідний вал з закріпленим на ньому водилом, вихідний вал з вилкою і коаксіально розташованим в ньому з можливістю повороту валом керування, і маховики, що встановлені з можливістю обертання на осі вхідного вала, який відрізняється тим, що на вилці посаджено з можливістю радіального переміщення кінематично зв’язану з валом керування каретку з пальцем, який через шатуни кінематично зв’язаний з коромислами, посадженими...
Планетарний варіатор
Номер патенту: 21207
Опубліковано: 15.03.2007
Автор: Чугуй Володимир Леонідович
МПК: F16H 3/00
Мітки: планетарний, варіатор
Формула / Реферат:
Планетарний варіатор, що містить планетарний ряд у складі сонячного колеса, водила, сателіта, який відрізняється тим, що елементи вказаного (першого) планетарного ряду зблоковані з елементами другого планетарного ряду у вигляді блока-шестірні сонячного колеса першого ряду із сонячним колесом другого ряду і блока-шестірні сателіта першого ряду із сателітом другого ряду, причому сателіт другого ряду зв'язаний із сонячним колесом другого ряду...
Зубчато-інерційний варіатор
Номер патенту: 81045
Опубліковано: 25.06.2013
Автор: Чугуй Володимир Леонідович
МПК: F16H 48/00, F03G 3/08
Мітки: варіатор, зубчато-інерційний
Формула / Реферат:
Зубчато-інерційний варіатор, що містить диференціал у складі чотирьох конічних зубчатих коліс: двох пліч і двох сателітів, розташованих у корпусі диференціала, перше із пліч зачеплене із двома сателітами, які у свою чергу зачеплені із другим із пліч так, що вершини утворюючих усіх конічних коліс сполучені, а їх осі розташовані в одній площині, кожне із пліч установлене в підшипникові опори корпуса диференціала, а кожний сателіт посаджений...
Попередній патент: Пристрій для черезкісткового остеосинтезу діафізарних переломів кісток передпліччя
Наступний патент: Анізотропно-ротаційна система
Випадковий патент: Спосіб моделювання внутрішньоутробної гіпоксії з асфіксією новонародженого в пологах