Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер
Номер патенту: 90942
Опубліковано: 10.06.2010
Автори: Тартишніков Сергій Олександрович, Денисов Микола Леонідович
Формула / Реферат
1. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер, який містить послідовно з'єднані між собою модуль курсу, модуль крену, модуль тангажу, а модуль курсу містить раму курсу у вигляді напіввилки, привод курсу з не менш ніж одним двигуном, вал курсу, який обертається всередині приводу курсу, привод крену, з не менш ніж одним двигуном, вал крену, який обертається всередині приводу крену, модуль крену містить раму крену у вигляді напіввилки, привод тангажу, з не менш ніж одним двигуном, вал тангажу, який обертається всередині приводу тангажу, та систему балансування по крену, і модуль тангажу містить раму тангажу у вигляді напіввилки та систему балансування по тангажу, а також електронні модулі, три датчики кутової швидкості, не менш ніж один акселерометр та не менш ніж один датчик кута розвороту і пульт дистанційного керування, який відрізняється тим, що рама курсу, рама крену та рама тангажу у вигляді напіввилок виконані жорсткими, а рама крену з'єднана з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, при цьому система балансування по крену є фіксатором рами крену відносно вала крену, крім того як електронні модулі він містить не менш ніж один послідовний канал обміну, а також він містить три акселерометри та два датчики кута розвороту, при цьому три датчики кутової швидкості розташовані на рамі тангажу під кутом 90° один до одного, і три акселерометри також розташовані на рамі тангажу під кутом 90° один до одного, крім того перший датчик кута розвороту розташований на валу крену, а другий датчик кута розвороту розташований на валу тангажу.
2. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1, який відрізняється тим, що рама крену у вигляді напіввилки, яка виконана жорсткою, містить основну трубу з двома паралельними трубами крену, які розташовані під кутом 90° до основної труби і з'єднані з системою балансування по крену.
3. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1 та п. 2, який відрізняється тим, що система балансування по крену містить балансувальну раму крену, яка жорстко прикріплена до вала крену і з'єднана з двома паралельними трубами крену, з можливістю руху балансувальної рами крену вздовж цих двох паралельних труб крену в площині, яка є перпендикулярною до горизонту, при цьому балансувальна рама крену містить два кулачкових фіксатори крену, упорний елемент крену з регулювальним гвинтом крену.
4. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1, який відрізняється тим, що рама тангажу у вигляді напіввилки, яка виконана жорсткою, містить платформу камери з двома паралельними трубами тангажу, які розташовані під кутом 90° до платформи камери, і з'єднані з системою балансування по тангажу.
5. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1 та п. 4, який відрізняється тим, що система балансування по тангажу містить балансувальну раму тангажу, яка жорстко прикріплена до вала тангажу і з'єднана з двома паралельними трубами тангажу, з можливістю руху балансувальної рами тангажу вздовж двох паралельних труб тангажу, і балансувальна рама тангажу містить два кулачкових фіксатори тангажу, упорний елемент тангажу з регулювальним гвинтом тангажу.
6. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1, який відрізняється тим, що як електронні модулі він містить три підсилювачі потужності двигунів приводів, мікропроцесорний пристрій, енергонезалежну пам'ять та два послідовних канали обміну, один з яких з'єднаний з пультом дистанційного керування, а другий з'єднаний з зовнішніми пристроями.
7. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1 та за п. 6, який відрізняється тим, що послідовний канал обміну, який з'єднаний з пультом дистанційного керування, виконаний у вигляді модуля радіозв'язку.
8. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1, який відрізняється тим, що пульт дистанційного керування містить мікроконтролер, блок енергонезалежної пам'яті, екран відображення інформації, електромеханічні елементи керування.
Текст
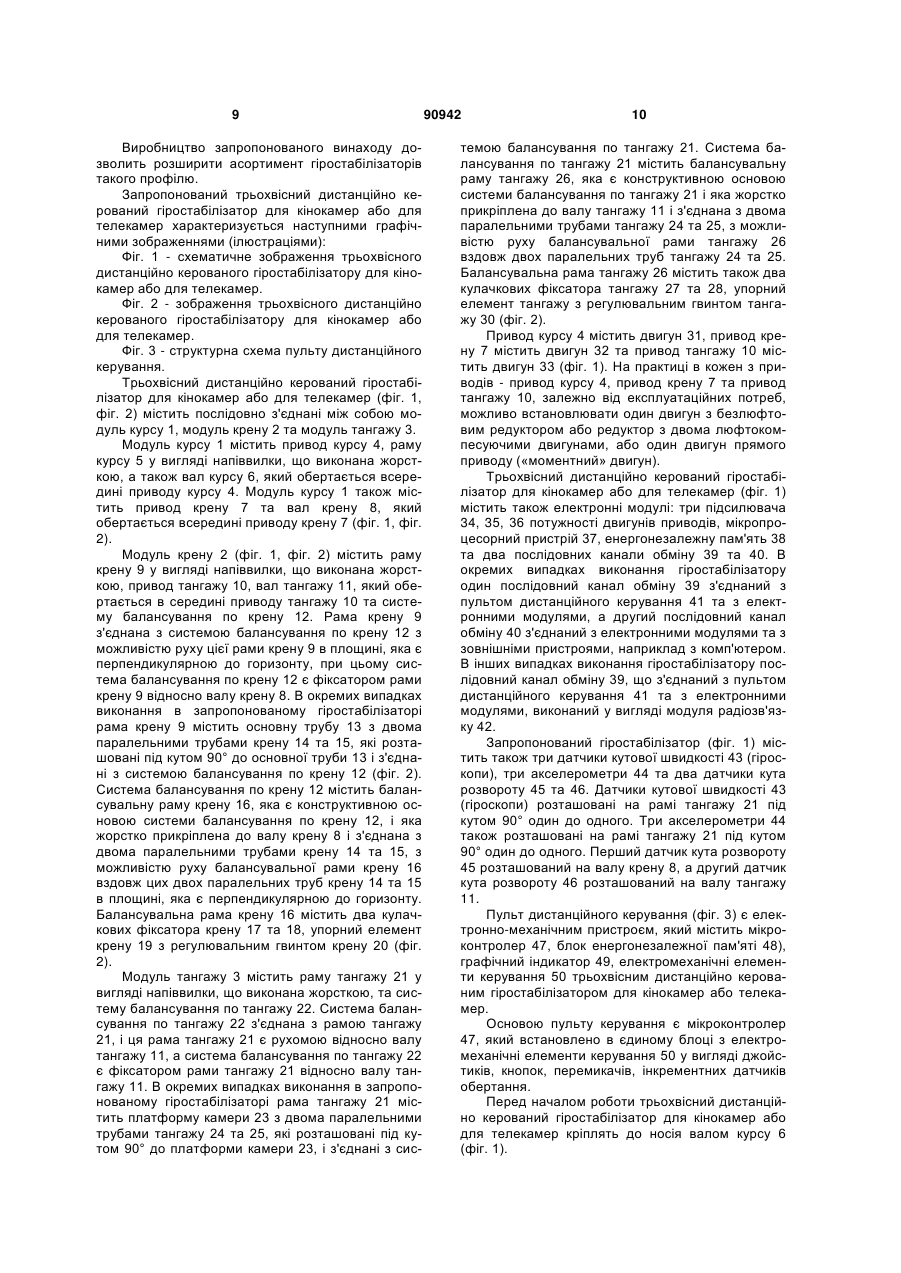
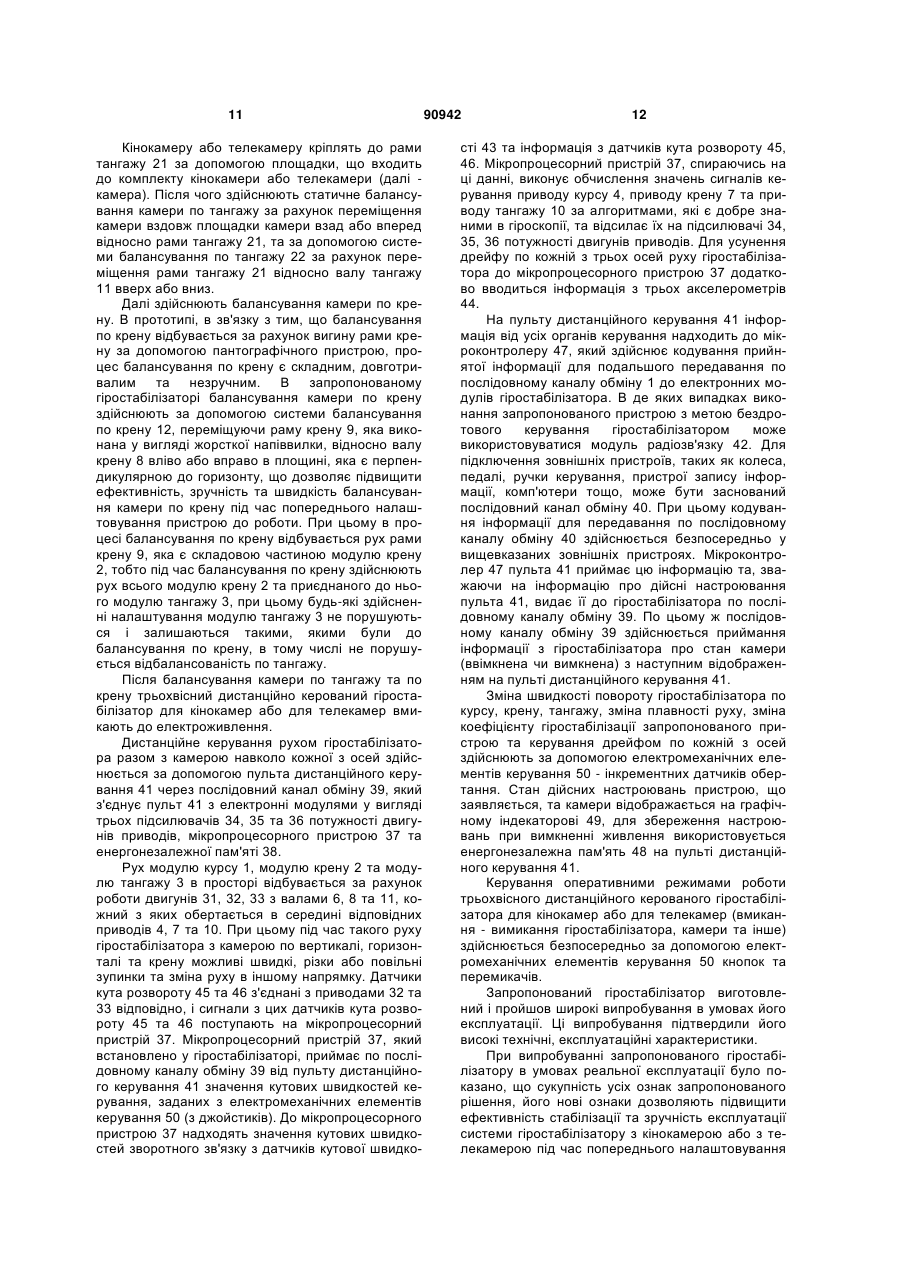
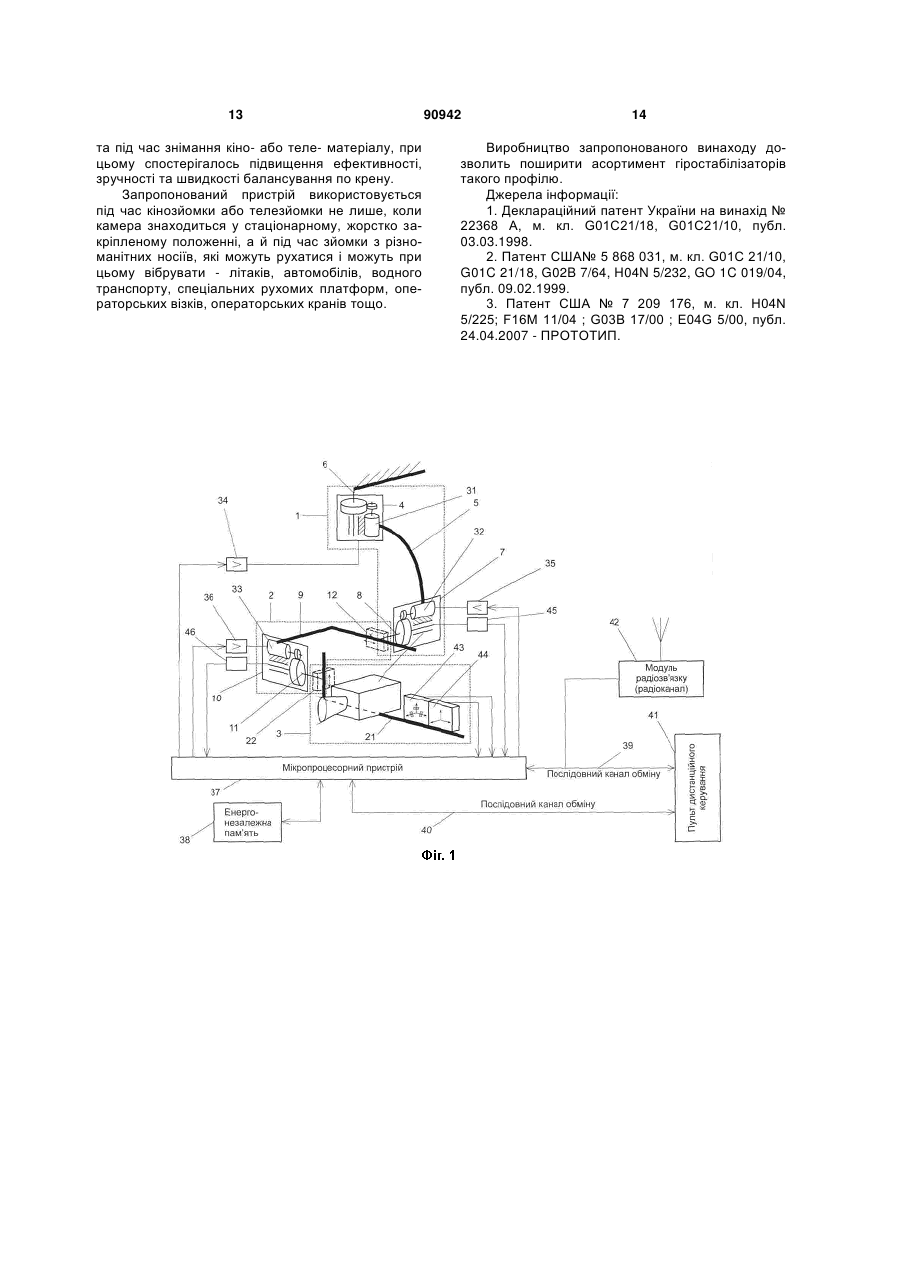
1. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер, який містить послідовно з'єднані між собою модуль курсу, модуль крену, модуль тангажу, а модуль курсу містить раму курсу у вигляді напіввилки, привод курсу з не менш ніж одним двигуном, вал курсу, який обертається всередині приводу курсу, привод крену, з не менш ніж одним двигуном, вал крену, який обертається всередині приводу крену, модуль крену містить раму крену у вигляді напіввилки, привод тангажу, з не менш ніж одним двигуном, вал тангажу, який обертається всередині приводу тангажу, та систему балансування по крену, і модуль тангажу містить раму тангажу у вигляді напіввилки та систему балансування по тангажу, а також електронні модулі, три датчики кутової швидкості, не менш ніж один акселерометр та не менш ніж один датчик кута розвороту і пульт дистанційного керування, який відрізняється тим, що рама курсу, рама крену та рама тангажу у вигляді напіввилок виконані жорсткими, а рама крену з'єднана з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, при цьому система балансування по крену є фіксатором рами крену відносно вала крену, крім того як електронні модулі він містить не менш ніж один послідовний канал обміну, а також він містить три акселерометри та два датчики кута розвороту, при цьому три датчики кутової швидкості розташовані на рамі тангажу 2 (19) 1 3 90942 4 відрізняється тим, що як електронні модулі він містить три підсилювачі потужності двигунів приводів, мікропроцесорний пристрій, енергонезалежну пам'ять та два послідовних канали обміну, один з яких з'єднаний з пультом дистанційного керування, а другий з'єднаний з зовнішніми пристроями. 7. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1 та за п. 6, який відрізняється тим, що послідовний ка нал обміну, який з'єднаний з пультом дистанційного керування, виконаний у вигляді модуля радіозв'язку. 8. Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер за п. 1, який відрізняється тим, що пульт дистанційного керування містить мікроконтролер, блок енергонезалежної пам'яті, екран відображення інформації, електромеханічні елементи керування. Винахід належить до приладобудування, а саме до трьохвісного дистанційно керованого гіростабілізатору для кінокамер або для телекамер. Відомий трьохосний гіростабілізатор кінотелекамери, що містить модуль курсу, модуль крену, модуль тангажу, систему балансування крену та, систему балансування тангажу (Деклараційний патент України на винахід № 22368 А, м. кл. G01C21/18, G01C21/10, публ. 03.03.1998 [1]; патент США № 5 868 031, м. кл. G01C 21/10, G01C 21/18, G02B 7/64, H04N 5/232, G01C 019/04 , публ. 09.02.1999 [2]). Конструктивне рішення цього винаходу спрямоване на підвищення точності стабілізації камери, підвищення точності забезпечення горизонтальності зображення, що отримують, спрощення конструкції, підвищення надійності гіростабілізатора, а також покращення доступу до телекамери, що утворює можливість керування горизонтальною панорамою по колу вертикалі незалежно від динаміки керування камерою і руху носія камери. Але таке рішення не дозволяє підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування та під час знімання кіно- або теле- матеріалу, Найближчим технічним рішенням до запропонованого винаходу є трьохвісний дистанційно керований гіростабілізований пристрій для кінокамер або для телекамер, який містить послідовно з'єднані між собою модуль курсу, модуль крену, модуль тангажу, а модуль курсу містить раму курсу у вигляді напіввилки, привод курсу з не менш ніж одним двигуном, вал курсу, який обертається всередині приводу курсу, привод крену, з не менш ніж одним двигуном, вал крену, який обертається всередині приводу крену, модуль крену містить раму крену у вигляді напіввилки, привод тангажу, з не менш ніж одним двигуном, вал тангажу, який обертається всередині приводу тангажу, та систему балансування по крену, і модуль тангажу містить раму тангажу у вигляді напіввилки та систему балансування по тангажу, а також електронні модулі, три датчики кутової швидкості, не менш ніж один акселерометр та не менш ніж один датчик кута розвороту і пульт дистанційного керування (патент США № 7 209 176, м. кл. H04N 5/225, F16M 11/04, G03B 17/00, E04G 5/00, публ. 24.04.2007 [3]). Цей винахід спрямований на підвищення робочих характеристик пристрою, він має такі переваги: можливість його експлуатації в будь-яку погоду, під час зннімання під водою, адаптованість до роботи з камерами різних форм, розмірів та ваги. Але конструкція цього винаходу передбачає розташування системи балансування крену у складі модуля тангажу, що досить ускладнює балансування системи по крену, що разом з існуючим розташуванням датчиків кутової швидкості та акселерометрів не дозволяє підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування та під час знімання кіно- або теле- матеріалу. Завданням запропонованого винаходу є створення трьохвісного дистанційно керованого гіростабілізатору для кінокамер або для телекамер, який б за рахунок виконання рами курсу, рами крену, рами тангажу у вигляді напіввилок жорсткими, з’єднання рами крену з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, за рахунок виконання системи балансування по крену як фіксатору рами крену відносно валу крену, наявності не менш ніж одного послідовного каналу обміну, трьох акселерометрів, двох датчиків куту розвороту, розташування трьох датчиків кутової швидкості на рамі тангажу під кутом 90° один до одного, розташування трьох акселерометрів на рамі тангажу під кутом 90° один до одного, розташування першого датчику куту розвороту на валу крену, і розташування другого датчику кута розвороту - на валу тангажу дозволив би підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування та під час знімання кіно- або телематеріалу, крім того дозволив би розширити асортимент трьохвісних дистанційно керованих гіростабілізаторів для кінокамер або для телекамер. Поставлене завдання вирішується тим, що трьохвісний дистанційно керований гіростабілізатор для кінокамер або для телекамер містить послідовно з'єднані між собою модуль курсу, модуль крену, модуль тангажу, а модуль курсу містить раму курсу у вигляді напіввилки, привод курсу з не менш ніж одним двигуном, вал курсу, який обертається всередині приводу курсу, привод крену, з не менш ніж одним двигуном, вал крену, який обертається всередині приводу крену, модуль крену містить раму крену у вигляді напіввилки, привод тангажу, з не менш ніж одним двигуном, вал тангажу, який обертається всередині приводу танга 5 жу, та систему балансування по крену, і модуль тангажу містить раму тангажу у вигляді напіввилки та систему балансування по тангажу, а також електронні модулі, три датчики кутової швидкості, не менш ніж один акселерометр та не менш ніж один датчик кута розвороту і пульт дистанційного керування. Новим є те, що рама курсу, рама крену та рама тангажу у вигляді напіввилок виконані жорсткими, а рама крену з'єднана з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, при цьому система балансування по крену є фіксатором рами крену відносно валу крену; як електронні модулі гіростабілізатор містить не менш ніж один послідовний канал обміну, а також він містить три акселерометри та два датчика кута розвороту; три датчики кутової швидкості розташовані на рамі тангажу під кутом 90° один до одного, і три акселерометри також розташовані на рамі тангажу під кутом 90° один до одного, крім того перший датчик кута розвороту розташований на валу крену, а другий датчик кута розвороту розташований на валу тангажу. В окремих випадках виконання, при особливих умовах застосування запропонований гіростабілізатор додатково характеризується наступними ознаками. Рама крену у вигляді напіввилки, яка виконана жорсткою, містить основну трубу з двома паралельними трубами крену, які розташовані під кутом 90° до основної труби і з'єднані з системою балансування по крену. Система балансування по крену містить балансувальну раму крену, яка жорстко прикріплена до валу крену і з'єднана з двома паралельними трубами крену, з можливістю руху балансувальної рами крену вздовж цих двох паралельних труб крену в площині, яка є перпендикулярною до горизонту, при цьому балансувальна рама крену містить два кулачкових фіксатора крену, упорний елемент крену з регулювальним гвинтом крену. Рама тангажу у вигляді напіввилки, яка виконана жорсткою, містить платформу камери з двома паралельними трубами тангажу, які розташовані під кутом 90° до платформи камери, і з'єднані з системою балансування потангажу. Система балансування по тангажу містить балансувальну раму тангажу, яка жорстко прикріплена до валу тангажу і з'єднана з двома паралельними трубами тангажу, з можливістю руху балансувальної рами тангажу вздовж двох паралельних труб тангажу, і балансувальна рама тангажу містить два кулачкових фіксатора тангажу, упорний елемент тангажу з регулювальним гвинтом тангажу. Як електронні модулі гідростабілізатор містить три підсилювача потужності двигунів приводів, мікропроцесорний пристрій, енергонезалежну пам'ять та два послідовних канали обміну, один з яких з'єднаний з пультом дистанційного керування, а другий з'єднаний з зовнішніми пристроями. Послідовний канал обміну, який з'єднаний з пультом дистанційного керування, виконаний у вигляді модуля радіозв'язку. 90942 6 Пульт дистанційного керування містить мікроконтролер, блок енергонезалежної пам'яті, екран відображення інформації, електромеханічні елементи керування. Сукупність усіх ознак запропонованого винаходу дозволяє підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування та під час знімання кіноабо теле- матеріалу, а також - поширити асортимент трьохвісних дистанційно керованих гіростабілізаторів для кінокамер або для телекамер. За рахунок нових ознак, а саме - виконання рами курсу, рами крену та рами тангажу у вигляді напіввилок жорстких, з'єднання рами крену з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, виконання системи балансування по крену фіксатором рами крену відносно валу крену, наявність послідовного каналу обміну, який з'єднує пульт дистанційного керування з електронними модулями, а також наявність трьох датчиків кутової швидкості, трьох акселерометрів та двох датчиків кута розвороту, розташування трьох датчиків кутової швидкості на рамі тангажу під кутом 90° один до одного, розташування трьох акселерометрів на рамі тангажу під кутом 90° один до одного, і розташування першого датчику кута розвороту на валу крену, а другого датчику кута розвороту - на валу тангажу досягається технічний результат: використання та виготовлення запропонованого гідростабілізатору дозволяє підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування та під час знімання кіно- або теле- матеріалу, крім того - поширити асортимент трьохвісних дистанційно керованих гіростабілізаторів для кінокамер або для телекамер. Виконання рами курсу, рами крену та рами тангажу у вигляді напіввилок, які є жорсткими, і виконання рами крену з'єднаною з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, при одночасному виконанні системи балансування по крену як фіксатору рами крену відносно валу крену дозволяє швидко, зручно та ефективно перед началом роботи усієї системи здійснити якісне балансування по тангажу та здійснити балансування по крену, не порушуючи при цьому балансування по тангажу. Швидке балансування гіростабілізатора з камерою перед початком або в процесі кіно- або теле- знімання є суттєвою та важливою технічною характеристикою таких приладів тому, що під час зйомок регулярно виникає необхідність змінювати місце або характер зйомки, що потребує переміщення або перемонтування кіно- або телекамери. Відомо, що процес кіно- або теле- знімання має високу вартість і тому, економія часу кіно- або теле- знімання, в тому числі і економія часу налаштовування операторського обладнання, мають важливе значення. За рахунок того, що рама курсу, рама крену та рама тангажу виконані жорсткими напіввилками, досягається зручність експлуатації при підготовці гірос 7 табілізатора для роботи та під час роботи, тобто рама курсу, рама крену та рама тангажу в результаті жорсткого виконання є суцільними конструктивними елементами, які не потребують окремого настроювання та монтування. Крім того за рахунок виконання рами крену з'єднаною з системою балансування по крену з можливістю руху цієї рами крену в площині, яка є перпендикулярною до горизонту, при одночасному виконанні системи балансування по крену як фіксатору рами крену відносно валу крену з'являється можливість за досить короткий час, наприклад, за одну хвилину, здійснити якісне балансування гіростабілізатора разом з камерою по крену, тобто здійснити рух рами крену та всього модулю крену разом із прикріпленим до модулю крену модулем тангажу відносно валу крену, який розташований у складі приводу крену та який закріплений на модулі курсу. При цьому непередбаченим є те, що в результаті того, що система балансування по крену з'єднана саме з рамою крену, то в процесі балансування по крену здійснюють налаштовування лише модулю крену гіростабілізатора, але при цьому не зачіпають настройки інших модулів, наприклад - настройки відбалансованого модулю тангажу. Непередбаченим є також те, що в результаті того, що система балансування по крену виконана безпосередньо як фіксатор рами крену відносно валу крену, цей вузол конструкції (система балансування по крену) набуває універсальності за рахунок одночасного виконання що найменш функції балансувального пристрою та функції фіксатора та носія рами крену гіростабілізатора. Таким чином пристрій також позбавлений зайвих конструктивних елементів, які можуть ускладнити конструкцію. Наявність, система розташування і з'єднання в гідростабілізаторі не менш ніж одного послідовного каналу обміну з пультом дистанційного керування, трьох датчиків кутової швидкості, трьох акселерометрів та двох датчиків кута розвороту забезпечують підвищення ефективності стабілізації та експлуатації системи гіростабілізатору разом з кінокамерою або з телекамерою в процесі знімання кіно- або теле- матеріалу. Особливе розташування датчиків, а саме - розташування на рамі тангажу трьох датчиків кутової швидкості під кутом 90° один до одного та трьох акселерометрів під кутом 90° один до одного: рама тангажу містить платформу для камери і відповідно камера встановлюється на цій платформ і безпосередня близькість розташування трьох датчиків кутової швидкості та трьох акселерометрів поряд із камерою на рамі тангажу дозволяє до мінімуму зменшити можливі погрішності, які можуть виникнути під час роботи гіростабілізатора, що значно підвищує стабілізацію та експлуатацію пристрою в цілому. Система розташування датчиків, що наведена вище, є найбільш ефективною з точки зору забезпечення якості стабілізування та керування гіростабілізатора з камерою. В цьому випадку також і розташування датчиків кутової швидкості, які встановлені сумісно на раму крену, надає можливість найбільш точного вимірювати абсолютних значень кутової швидкості об'єкту стабілізування за рахунок того, що вони врахову 90942 8 ють крім іншого й прогини, які викликаються тим, що загальна конструкція гіростабілізатора містить також й не жорсткі з'єднання.. Досягнення технічного результату при окремих випадках виконання, застосування запропонованого рішення посилюється за рахунок того, що: - рама крену у вигляді напіввилки, яка виконана жорсткою, містить основну трубу з двома паралельними трубами крену, які розташовані під кутом 90° до основної труби і з'єднані з системою балансування по крену; - система балансування по крену містить балансувальну раму крену, яка жорстко прикріплена до валу крену і з'єднана з двома паралельними трубами крену, з можливістю руху балансувальної рами крену вздовж цих двох паралельних труб крену в площині, яка є перпендикулярною до горизонту, при цьому балансувальна рама крену містить два кулачкових фіксатора крену, упорний елемент крену з регулювальним гвинтом крену; - рама тангажу у вигляді напіввилки, яка виконана жорсткою, містить платформу камери з двома паралельними трубами тангажу, які розташовані під кутом 90° до платформи камери, і з'єднані з системою балансування по тангажу; - система балансування по тангажу містить балансувальну раму тангажу, яка жорстко прикріплена до валу тангажу і з'єднана з двома паралельними трубами тангажу, з можливістю руху балансувальної рами тангажу вздовж двох паралельних труб тангажу, і балансувальна рама тангажу містить два кулачкових фіксатора тангажу, упорний елемент тангажу з регулювальним гвинтом тангажу; - як електронні модулі гідростабілізатор містить три підсилювача потужності двигунів приводів., мікропроцесорний пристрій , енергонезалежну пам'ять та два послідовних канали обміну, один з яких з'єднаний з пультом дистанційного керування, а другий з'єднаний з зовнішніми пристроями, наприклад з комп'ютером; - послідовний канал обміну, який з'єднаний з пультом дистанційного керування виконаний у вигляді модуля радіозв'язку; - пульт дистанційного керування містить мікроконтролер, блок енергонезалежної пам'яті, екран відображення інформації, електромеханічні елементи керування. Технічний результат при використанні запропонованого гіростабілізатору досягається саме в межах кількісних характеристик, які наведені в формулі винаходу - за межами цих значень технічний результат не досягається. Запропонований гіростабілізатор виготовлений і пройшов широкі випробування в умовах його експлуатації. Ці випробування підтвердили його високі технічні, експлуатаційні характеристики - він в умовах реальної експлуатації дозволив підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування та під час знімання кіно- або теле- матеріалу, при цьому спостерігалось підвищення ефективності, зручності та швидкості балансування по крену. 9 Виробництво запропонованого винаходу дозволить розширити асортимент гіростабілізаторів такого профілю. Запропонований трьохвісний дистанційно керований гіростабілізатор для кінокамер або для телекамер характеризується наступними графічними зображеннями (ілюстраціями): Фіг. 1 - схематичне зображення трьохвісного дистанційно керованого гіростабілізатору для кінокамер або для телекамер. Фіг. 2 - зображення трьохвісного дистанційно керованого гіростабілізатору для кінокамер або для телекамер. Фіг. 3 - структурна схема пульту дистанційного керування. Трьохвісний дистанційно керований гіростабілізатор для кінокамер або для телекамер (фіг. 1, фіг. 2) містить послідовно з'єднані між собою модуль курсу 1, модуль крену 2 та модуль тангажу 3. Модуль курсу 1 містить привод курсу 4, раму курсу 5 у вигляді напіввилки, що виконана жорсткою, а також вал курсу 6, який обертається всередині приводу курсу 4. Модуль курсу 1 також містить привод крену 7 та вал крену 8, який обертається всередині приводу крену 7 (фіг. 1, фіг. 2). Модуль крену 2 (фіг. 1, фіг. 2) містить раму крену 9 у вигляді напіввилки, що виконана жорсткою, привод тангажу 10, вал тангажу 11, який обертається в середині приводу тангажу 10 та систему балансування по крену 12. Рама крену 9 з'єднана з системою балансування по крену 12 з можливістю руху цієї рами крену 9 в площині, яка є перпендикулярною до горизонту, при цьому система балансування по крену 12 є фіксатором рами крену 9 відносно валу крену 8. В окремих випадках виконання в запропонованому гіростабілізаторі рама крену 9 містить основну трубу 13 з двома паралельними трубами крену 14 та 15, які розташовані під кутом 90° до основної труби 13 і з'єднані з системою балансування по крену 12 (фіг. 2). Система балансування по крену 12 містить балансувальну раму крену 16, яка є конструктивною основою системи балансування по крену 12, і яка жорстко прикріплена до валу крену 8 і з'єднана з двома паралельними трубами крену 14 та 15, з можливістю руху балансувальної рами крену 16 вздовж цих двох паралельних труб крену 14 та 15 в площині, яка є перпендикулярною до горизонту. Балансувальна рама крену 16 містить два кулачкових фіксатора крену 17 та 18, упорний елемент крену 19 з регулювальним гвинтом крену 20 (фіг. 2). Модуль тангажу 3 містить раму тангажу 21 у вигляді напіввилки, що виконана жорсткою, та систему балансування по тангажу 22. Система балансування по тангажу 22 з'єднана з рамою тангажу 21, і ця рама тангажу 21 є рухомою відносно валу тангажу 11, а система балансування по тангажу 22 є фіксатором рами тангажу 21 відносно валу тангажу 11. В окремих випадках виконання в запропонованому гіростабілізаторі рама тангажу 21 містить платформу камери 23 з двома паралельними трубами тангажу 24 та 25, які розташовані під кутом 90° до платформи камери 23, і з'єднані з сис 90942 10 темою балансування по тангажу 21. Система балансування по тангажу 21 містить балансувальну раму тангажу 26, яка є конструктивною основою системи балансування по тангажу 21 і яка жорстко прикріплена до валу тангажу 11 і з'єднана з двома паралельними трубами тангажу 24 та 25, з можливістю руху балансувальної рами тангажу 26 вздовж двох паралельних труб тангажу 24 та 25. Балансувальна рама тангажу 26 містить також два кулачкових фіксатора тангажу 27 та 28, упорний елемент тангажу з регулювальним гвинтом тангажу 30 (фіг. 2). Привод курсу 4 містить двигун 31, привод крену 7 містить двигун 32 та привод тангажу 10 містить двигун 33 (фіг. 1). На практиці в кожен з приводів - привод курсу 4, привод крену 7 та привод тангажу 10, залежно від експлуатаційних потреб, можливо встановлювати один двигун з безлюфтовим редуктором або редуктор з двома люфтокомпесуючими двигунами, або один двигун прямого приводу («моментний» двигун). Трьохвісний дистанційно керований гіростабілізатор для кінокамер або для телекамер (фіг. 1) містить також електронні модулі: три підсилювача 34, 35, 36 потужності двигунів приводів, мікропроцесорний пристрій 37, енергонезалежну пам'ять 38 та два послідовних канали обміну 39 та 40. В окремих випадках виконання гіростабілізатору один послідовний канал обміну 39 з'єднаний з пультом дистанційного керування 41 та з електронними модулями, а другий послідовний канал обміну 40 з'єднаний з електронними модулями та з зовнішніми пристроями, наприклад з комп'ютером. В інших випадках виконання гіростабілізатору послідовний канал обміну 39, що з'єднаний з пультом дистанційного керування 41 та з електронними модулями, виконаний у вигляді модуля радіозв'язку 42. Запропонований гіростабілізатор (фіг. 1) містить також три датчики кутової швидкості 43 (гіроскопи), три акселерометри 44 та два датчики кута розвороту 45 та 46. Датчики кутової швидкості 43 (гіроскопи) розташовані на рамі тангажу 21 під кутом 90° один до одного. Три акселерометри 44 також розташовані на рамі тангажу 21 під кутом 90° один до одного. Перший датчик кута розвороту 45 розташований на валу крену 8, а другий датчик кута розвороту 46 розташований на валу тангажу 11. Пульт дистанційного керування (фіг. 3) є електронно-механічним пристроєм, який містить мікроконтролер 47, блок енергонезалежної пам'яті 48), графічний індикатор 49, електромеханічні елементи керування 50 трьохвісним дистанційно керованим гіростабілізатором для кінокамер або телекамер. Основою пульту керування є мікроконтролер 47, який встановлено в єдиному блоці з електромеханічні елементи керування 50 у вигляді джойстиків, кнопок, перемикачів, інкрементних датчиків обертання. Перед началом роботи трьохвісний дистанційно керований гіростабілізатор для кінокамер або для телекамер кріплять до носія валом курсу 6 (фіг. 1). 11 Кінокамеру або телекамеру кріплять до рами тангажу 21 за допомогою площадки, що входить до комплекту кінокамери або телекамери (далі камера). Після чого здійснюють статичне балансування камери по тангажу за рахунок переміщення камери вздовж площадки камери взад або вперед відносно рами тангажу 21, та за допомогою системи балансування по тангажу 22 за рахунок переміщення рами тангажу 21 відносно валу тангажу 11 вверх або вниз. Далі здійснюють балансування камери по крену. В прототипі, в зв'язку з тим, що балансування по крену відбувається за рахунок вигину рами крену за допомогою пантографічного пристрою, процес балансування по крену є складним, довготривалим та незручним. В запропонованому гіростабілізаторі балансування камери по крену здійснюють за допомогою системи балансування по крену 12, переміщуючи раму крену 9, яка виконана у вигляді жорсткої напіввилки, відносно валу крену 8 вліво або вправо в площині, яка є перпендикулярною до горизонту, що дозволяє підвищити ефективність, зручність та швидкість балансування камери по крену під час попереднього налаштовування пристрою до роботи. При цьому в процесі балансування по крену відбувається рух рами крену 9, яка є складовою частиною модулю крену 2, тобто під час балансування по крену здійснюють рух всього модулю крену 2 та приєднаного до нього модулю тангажу 3, при цьому будь-які здійсненні налаштування модулю тангажу 3 не порушуються і залишаються такими, якими були до балансування по крену, в тому числі не порушується відбалансованість по тангажу. Після балансування камери по тангажу та по крену трьохвісний дистанційно керований гіростабілізатор для кінокамер або для телекамер вмикають до електроживлення. Дистанційне керування рухом гіростабілізатора разом з камерою навколо кожної з осей здійснюється за допомогою пульта дистанційного керування 41 через послідовний канал обміну 39, який з'єднує пульт 41 з електронні модулями у вигляді трьох підсилювачів 34, 35 та 36 потужності двигунів приводів, мікропроцесорного пристрою 37 та енергонезалежної пам'яті 38. Рух модулю курсу 1, модулю крену 2 та модулю тангажу 3 в просторі відбувається за рахунок роботи двигунів 31, 32, 33 з валами 6, 8 та 11, кожний з яких обертається в середині відповідних приводів 4, 7 та 10. При цьому під час такого руху гіростабілізатора з камерою по вертикалі, горизонталі та крену можливі швидкі, різки або повільні зупинки та зміна руху в іншому напрямку. Датчики кута розвороту 45 та 46 з'єднані з приводами 32 та 33 відповідно, і сигнали з цих датчиків кута розвороту 45 та 46 поступають на мікропроцесорний пристрій 37. Мікропроцесорний пристрій 37, який встановлено у гіростабілізаторі, приймає по послідовному каналу обміну 39 від пульту дистанційного керування 41 значення кутових швидкостей керування, заданих з електромеханічних елементів керування 50 (з джойстиків). До мікропроцесорного пристрою 37 надходять значення кутових швидкостей зворотного зв'язку з датчиків кутової швидко 90942 12 сті 43 та інформація з датчиків кута розвороту 45, 46. Мікропроцесорний пристрій 37, спираючись на ці данні, виконує обчислення значень сигналів керування приводу курсу 4, приводу крену 7 та приводу тангажу 10 за алгоритмами, які є добре знаними в гіроскопії, та відсилає їх на підсилювачі 34, 35, 36 потужності двигунів приводів. Для усунення дрейфу по кожній з трьох осей руху гіростабілізатора до мікропроцесорного пристрою 37 додатково вводиться інформація з трьох акселерометрів 44. На пульту дистанційного керування 41 інформація від усіх органів керування надходить до мікроконтролеру 47, який здійснює кодування прийнятої інформації для подальшого передавання по послідовному каналу обміну 1 до електронних модулів гіростабілізатора. В де яких випадках виконання запропонованого пристрою з метою бездротового керування гіростабілізатором може використовуватися модуль радіозв'язку 42. Для підключення зовнішніх пристроїв, таких як колеса, педалі, ручки керування, пристрої запису інформації, комп'ютери тощо, може бути заснований послідовний канал обміну 40. При цьому кодування інформації для передавання по послідовному каналу обміну 40 здійснюється безпосередньо у вищевказаних зовнішніх пристроях. Мікроконтролер 47 пульта 41 приймає цю інформацію та, зважаючи на інформацію про дійсні настроювання пульта 41, видає її до гіростабілізатора по послідовному каналу обміну 39. По цьому ж послідовному каналу обміну 39 здійснюється приймання інформації з гіростабілізатора про стан камери (ввімкнена чи вимкнена) з наступним відображенням на пульті дистанційного керування 41. Зміна швидкості повороту гіростабілізатора по курсу, крену, тангажу, зміна плавності руху, зміна коефіцієнту гіростабілізації запропонованого пристрою та керування дрейфом по кожній з осей здійснюють за допомогою електромеханічних елементів керування 50 - інкрементних датчиків обертання. Стан дійсних настроювань пристрою, що заявляється, та камери відображається на графічному індекаторові 49, для збереження настроювань при вимкненні живлення використовується енергонезалежна пам'ять 48 на пульті дистанційного керування 41. Керування оперативними режимами роботи трьохвісного дистанційного керованого гіростабілізатора для кінокамер або для телекамер (вмикання - вимикання гіростабілізатора, камери та інше) здійснюється безпосередньо за допомогою електромеханічних елементів керування 50 кнопок та перемикачів. Запропонований гіростабілізатор виготовлений і пройшов широкі випробування в умовах його експлуатації. Ці випробування підтвердили його високі технічні, експлуатаційні характеристики. При випробуванні запропонованого гіростабілізатору в умовах реальної експлуатації було показано, що сукупність усіх ознак запропонованого рішення, його нові ознаки дозволяють підвищити ефективність стабілізації та зручність експлуатації системи гіростабілізатору з кінокамерою або з телекамерою під час попереднього налаштовування 13 та під час знімання кіно- або теле- матеріалу, при цьому спостерігалось підвищення ефективності, зручності та швидкості балансування по крену. Запропонований пристрій використовується під час кінозйомки або телезйомки не лише, коли камера знаходиться у стаціонарному, жорстко закріпленому положенні, а й під час зйомки з різноманітних носіїв, які можуть рухатися і можуть при цьому вібрувати - літаків, автомобілів, водного транспорту, спеціальних рухомих платформ, операторських візків, операторських кранів тощо. 90942 14 Виробництво запропонованого винаходу дозволить поширити асортимент гіростабілізаторів такого профілю. Джерела інформації: 1. Деклараційний патент України на винахід № 22368 А, м. кл. G01C21/18, G01C21/10, публ. 03.03.1998. 2. Патент США№ 5 868 031, м. кл. G01C 21/10, G01C 21/18, G02B 7/64, H04N 5/232, GO 1C 019/04, публ. 09.02.1999. 3. Патент США № 7 209 176, м. кл. H04N 5/225; F16M 11/04 ; G03B 17/00 ; E04G 5/00, публ. 24.04.2007 - ПРОТОТИП. 15 Комп’ютерна верстка Д. Шеверун 90942 Підписне 16 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюThree-axle remote-controlled hydrostabilizer for cine cameras and tv cameras
Автори англійськоюDenysov Mykola Leonidovych, Tartyshnikov Serhii Oleksandrovych
Назва патенту російськоюТрехосный дистанционно управляемый гидростабилизатор для кинокамер или для телекамер
Автори російськоюДенисов Николай Леонидович, Тартышников Сергей Александрович
МПК / Мітки
МПК: G03B 17/00, F16M 11/02, G01C 19/00
Мітки: кінокамер, керований, тривісний, телекамер, гіростабілізатор, дистанційно
Код посилання
<a href="https://ua.patents.su/8-90942-trivisnijj-distancijjno-kerovanijj-girostabilizator-dlya-kinokamer-abo-dlya-telekamer.html" target="_blank" rel="follow" title="База патентів України">Тривісний дистанційно керований гіростабілізатор для кінокамер або для телекамер</a>
Дистанційно керований транспортний засіб

Номер патенту: 29344
Опубліковано: 10.01.2008
Автор: Бугаєнко Іван Вікторович
МПК: A63H 30/00, A63H 17/00, A63H 27/00, H04Q 7/20, A63H 23/00
Мітки: засіб, транспортний, керований, дистанційно
Формула / Реферат:
1. Дистанційно керований транспортний засіб, що містить корпус, закріплені в ньому або до нього мінімум одну схему керування й обробки інформації, яка дозволяє використовувати транспортний засіб як бездротовий телефон/відеофон, мінімум один приймач-передавач радіосигналів, здатний обмінюватись інформацією з мережами бездротового зв'язку та/або з іншими пристроями, зв'язаний зі схемою керування й обробки інформації, джерело живлення та/або...
Дистанційно керований транспортний засіб
Номер патенту: 29254
Опубліковано: 10.01.2008
Автор: Бугаєнко Іван Вікторович
МПК: H04Q 7/20
Мітки: транспортний, дистанційно, засіб, керований
Формула / Реферат:
1. Дистанційно керований транспортний засіб, що містить корпус, закріплені в ньому або до нього схему керування й обробки інформації, мінімум один приймач-передавач радіосигналів, з'єднаний зі схемою керування й обробки інформації, антену, з'єднану із приймачем-передавачем радіосигналів, джерело живлення й/або виводи для його підключення, з'єднане зі схемою керування й обробки інформації, мінімум один привод, механічно зв'язаний з корпусом,...
Дистанційно керований транспортний засіб

Номер патенту: 28216
Опубліковано: 26.11.2007
Автор: Бугаєнко Іван Вікторович
МПК: A63H 23/00, A63H 17/00, A63H 27/00, A63H 30/00
Мітки: засіб, дистанційно, керований, транспортний
Формула / Реферат:
1. Дистанційно керований транспортний засіб, який містить корпус, закріплені в ньому або до нього схему керування й обробки інформації, мінімум один привід, що здійснює переміщення транспортного засобу у відповідному середовищі, механічно з'єднаний з корпусом, з'єднаний зі схемою керування й обробки інформації, який відрізняється тим, що транспортний засіб додатково містить мінімум одне кріплення для фіксації бездротового телефону та...
Ударний дистанційно керований безпілотний літальний апарат
Номер патенту: 31234
Опубліковано: 25.03.2008
Автори: Гордієвський Олексій Тихонович, Загороднюк Юрій Григорович, Борохвостов Ігор Валерійович, Чіпіжко Юрій Анатолійович, Растригін Олександр Олексійович, Асланян Альберт Едуардович, Лук'янов Павло Олександрович, Тішков Сергій Юрійович, Сила Ігор Михайлович, Машталір Вадим Віталійович, Мельник Олександр Дмитрович, Чучмій Андрій Володимирович, Лапицький Сергій Володимирович, Василенко Олександр Васильович, Комаров Володимир Олександрович
МПК: B64C 30/00, H04B 7/185
Мітки: апарат, ударний, дистанційно, літальний, безпілотний, керований
Формула / Реферат:
1. Ударний дистанційно керований безпілотний літальний апарат, який містить фюзеляж, крило та хвостове оперення з органами керування, розміщені на фюзеляжі, один, два чи більше двигунів, пристрій для зльоту/посадки, вузли кріплення засобів ураження, закріплені на крилі і/чи на фюзеляжі, системи забезпечення та функціонування літального апарата, систему керування та наведення літального апарата на ціль, засоби ураження, розміщені на зазначених...
Дистанційно керований кінооператорський кран
Номер патенту: 2836
Опубліковано: 26.12.1994
Автор: Кокуш Анатолій Якимович
МПК: B66C 23/72, G03B 17/00
Мітки: керований, дистанційно, кран, кінооператорський
Формула / Реферат:
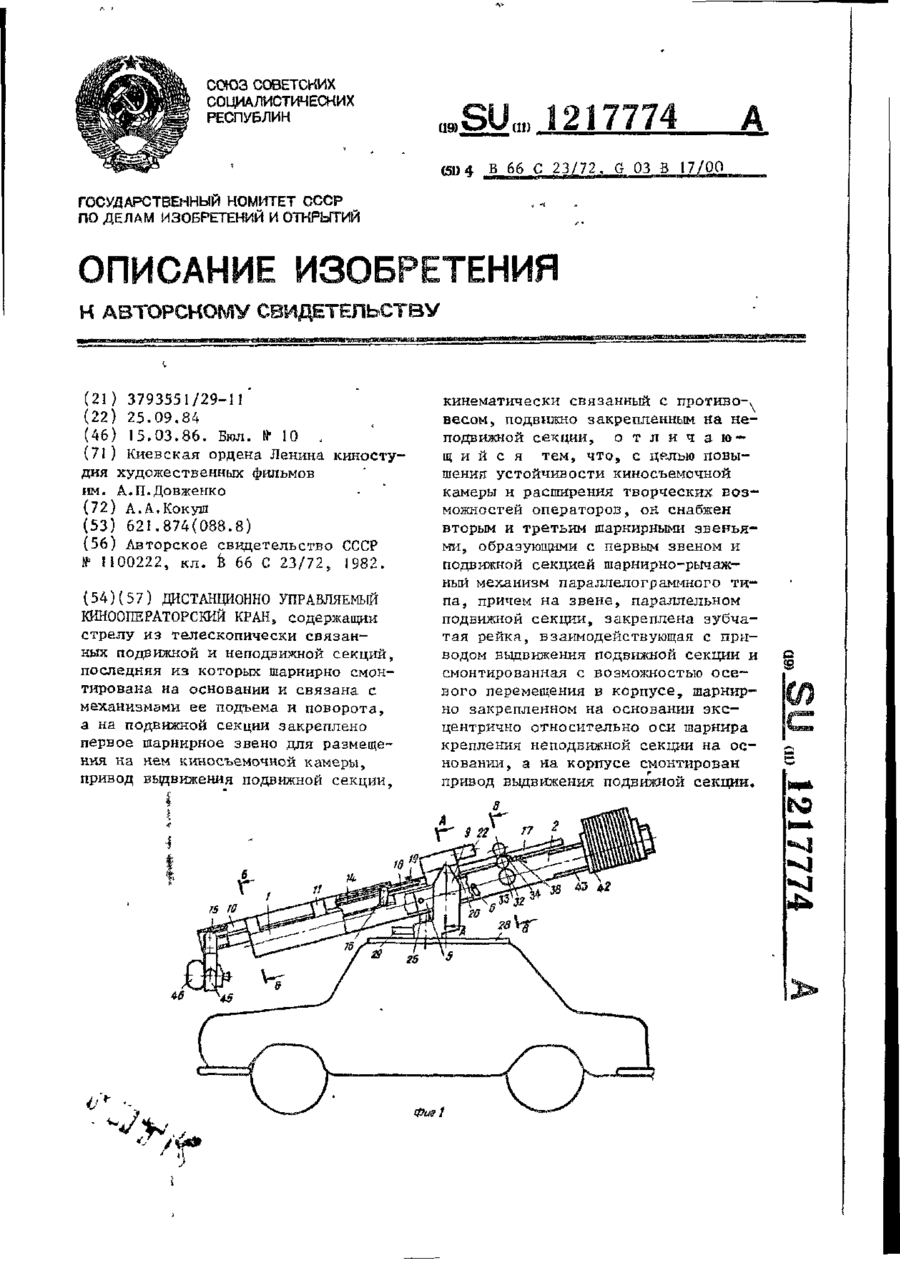
Дистанционно управляемый кинооператорский кран, содержащий стрелу из телескопически связанных подвижной и неподвижной секций, последняя их которых шарнирно смонтирована на основании и связана с механизмами ее подъема и поворота, а на подвижной секции закреплено первое шарнирное звено для размещения на нем киносъемочной камеры, привод выдвижения подвижной секции, кинематически связанный с противовесом, подвижно закрепленным на неподвижной...
Попередній патент: Пристрій для змащування гребенів коліс
Наступний патент: Спосіб селекції результатів вимірювань змінних параметрів об’єкта та універсальний пристрій для його здійснення
Випадковий патент: Вітрогенератор удовіченка