Система керування безпілотного літального апарата
Номер патенту: 53726
Опубліковано: 11.10.2010
Автори: Єрмакова Вікторія Валеріївна, Бекетов Антон Сергійович, Кописов Олег Едуардович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович
Формула / Реферат
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, датчика напруги, вхід якого з'єднаний з другим виходом сервоприводу, а вихід з'єднаний з третім нормуючим підсилювачем, вихід якого з'єднаний з четвертим входом мультиплексора, а також датчика струму, вхід якого з'єднаний з третім виходом сервоприводу, а вихід з'єднаний з четвертим нормуючим підсилювачем, вихід якого з'єднаний з п'ятим входом мультиплексора, яка відрізняється тим, що в систему введені два датчики кута та два датчики кутової швидкості, виходи яких під'єднані до п'ятого, шостого, сьомого, восьмого нормуючих підсилювачів, виходи першого, п'ятого, шостого нормуючих підсилювачів під'єднані до входів першого блоку аналізу ресурсу, вихід якого під'єднаний до другого входу мультиплексора, виходи другого, сьомого, восьмого нормуючих підсилювачів під'єднані до входів другого блоку аналізу ресурсу, вихід яких під'єднаний до третього входу мультиплексора.
Текст
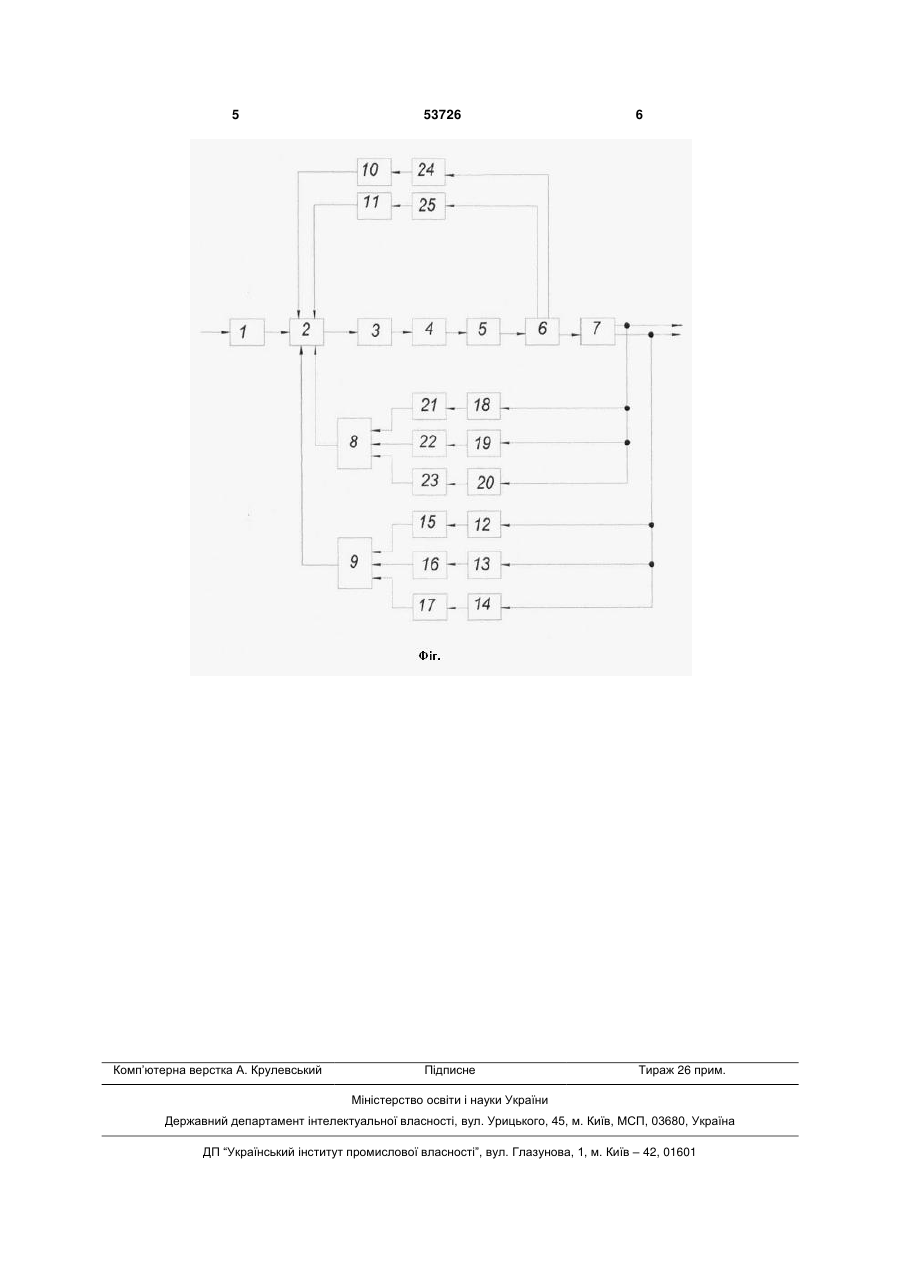
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормую 3 Недоліком цієї системи є неможливість ідентифікації відмов вимірювачів та парирування відмов елементів системи. Задачею корисною моделі є забезпечення відмовостійкості системи керування та ідентифікації вимірювача, який втратив працездатність. Поставлена задача вирішується тим, що в систему керування безпілотного літального апарата, яка складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, датчика напруги, вхід якого з'єднаний з другим виходом сервоприводу, а вихід з'єднаний з третім нормуючим підсилювачем, вихід якого з'єднаний з четвертим входом мультиплексора, а також датчика струму, вхід якого з'єднаний з третім виходом сервоприводу, а вихід з'єднаний з четвертим нормуючим підсилювачем, вихід якого з'єднаний з п'ятим входом мультиплексора, згідно з корисною моделлю, введені два датчика кута та два датчика кутової швидкості, виходи яких під'єднані до п'ятого, шостого, сьомого, восьмого нормуючих підсилювачів, виходи першого, п'ятого, шостого нормуючих підсилювачів під'єднані до входів першого блоку аналізу ресурсу, вихід якого під'єднаний до другого входу мультиплексора, виходи другого, сьомого, восьмого нормуючих підсилювачів під'єднані до входів другого блоку аналізу ресурсу, вихід якого під'єднаний до третього входу мультиплексора. Сутність корисної моделі пояснюється кресленнями, де на Фіг. наведена блок-схема запропонованої системи керування безпілотного літального апарата. Система керування безпілотного літального апарата містить послідовно з'єднані задавач 1, мультиплексор 2, аналого-цифровий перетворювач 3, обчислювач 4, цифро-аналоговий перетворювач 5 та сервопривід 6. Мультиплексор 2 має п'ять входів: вихідний сигнал задавача 1; вихідний сигнал першого блоку аналізу ресурсу 8; вихідний сигнал другого блоку аналізу ресурсу 9; вихідний сигнал третього нормуючого підсилювача 10; вихідний сигнал четвертого нормуючого підсилювача 11. З виходу мультиплексора 2 сигнал подається на вхід аналого-цифрового перетворювача 3. На об'єкті керування 7 встановлені датчики кутової швидкості 12, 13, 14, виходи яких з'єднані з входами другого, сьомого, восьмого нормуючих підсилювачів 15, 16, 17 відповідно, датчики кута 18, 19, 20, виходи яких з'єднані з входами першого, п'ятого, шостого нормуючих підсилювачів 21, 22, 23. Вхід датчика напруги 24 з'єднаний з другим виходом сервопривода 6, а вихід - з входом третього нормуючого підсилювача 10. Вхід датчика струму 25 з'єднаний з третім виходом сервопривода 6, а 53726 4 вихід -з входом четвертого нормуючого підсилювача 11. Система керування безпілотного літального апарата працює наступним чином. Під час польоту на перший вхід мультиплексора 2 через задавач 1 подається сигнал про задане значення кута тангажа або кутової швидкості тангажа, який порівнюється в обчислювачі з дійсним значенням кута тангажа або кутової швидкості тангажа. Якщо між цими сигналами є різниця, то сигнал з виходу мультиплексора 2 через аналого-цифровий перетворювач 3 надходить на вхід обчислювача 4. Сигнал з виходу обчислювача 4 через цифро-аналоговий перетворювач 5 подається на сервопривід 6, який перетворює сигнали керування у відповідні переміщення органів керування, які впливають на об'єкт керування 7, на першому виході якого маємо сигнал про значення кута тангажа, а на другому виході - сигнал про кутову швидкість тангажа. Сигнал про кутову швидкість тангажа вимірюється трьома датчиками кутової швидкості 12, 13, 14 та передається на другий, сьомий, восьмий нормуючі підсилювачі 15, 16, 17, а далі - на входи другого блоку аналізу ресурсу 9. Використовуючи нормовані показання трьох датчиків кутової швидкості 12, 13, 14, другий блок аналізу ресурсу 9 визначає, чи всі датчики 12, 13, 14 справні, а якщо один з датчиків кутової швидкості втрачає працездатність, то блок аналізу ресурсу визначає номер відмовившего датчика. У вихідному сигналі другого блоку аналізу ресурсу 9 міститься інформація про кутову швидкість об'єкта керування 7, яка передається на третій вхід мультиплексора 2. Сигнал про діюче значення кута тангажа вимірюється трьома датчиками кута 18, 19, 20 та передається на перший, п'ятий, шостий нормуючі підсилювачі 21, 22, 23, а далі - на входи першого блоку аналізу ресурсу 8. Використовуючи нормовані показання трьох датчиків кута 18, 19, 20, перший блок аналізу ресурсу 8 визначає, чи всі датчики 18, 19, 20 справні, а якщо один з датчиків кута втрачає працездатність, то блок аналізу ресурсу визначає номер відмовившего датчика. У вихідному сигналі блоку аналізу ресурсу 8 міститься інформація про кутове положення об'єкта керування 7, яка передається на другий вхід мультиплексора 2. Сигнал про значення напруги подається з другого виходу сервопривода 6 на датчик напруги 24, далі - через третій нормуючий підсилювач 10 на четвертий вхід мультиплексора 2. Сигнал про діюче значення струму подається з третього виходу сервопривода 6 на датчик струму 25, далі - через четвертий нормуючий підсилювач 11 на п'ятий вхід мультиплексора 2. Таким чином, введення до системи двох датчиків кутової швидкості, двох датчиків кута, двох блоків аналізу ресурсу дозволяє забезпечити відмовостійкість системи керування та ідентифікацію вимірювачів, які втратили працездатність. 5 Комп’ютерна верстка А. Крулевський 53726 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of pilotless aircraft
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Kopysov Oleh Eduardovych, Beketov Anton Serhiiovych, Yermakova Viktoria Valeriivna
Назва патенту російськоюСистема управления беспилотного летательного аппарата
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Кописов Олег Эдуардович, Бекетов Антон Сергеевич, Ермакова Виктория Валерьевна
МПК / Мітки
МПК: B64C 13/00
Мітки: літального, безпілотного, система, керування, апарата
Код посилання
<a href="https://ua.patents.su/3-53726-sistema-keruvannya-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система керування безпілотного літального апарата</a>
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Симонов Володимир Федорович, Честних Тимур Володимирович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, система, апарата, літального, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Амеліна Ірина Вікторівна, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, відмовостійка, безпілотного, боковим, рухом, керування, система, апарата
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Паніна Алла Володимирівна, Литвиненко Денис Володимирович, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: стабілізації, система, апарата, літального, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Бондар Катерина Михайлівна, Амелін Сергій Вікторович, Жалніна Вікторія Василівна
МПК: G05D 1/03
Мітки: каналу, літального, система, апарата, безпілотного, стабілізації, бокового
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, апарата, система, безпілотного, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Попередній патент: Випробувальний стенд блока відмовостійких гіроскопічних датчиків
Наступний патент: Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата
Випадковий патент: Очисний пристрій