Динамічна транспедикулярна система
Номер патенту: 93337
Опубліковано: 25.01.2011
Автори: Коваленко Олексій Вікторович, Поляков Олександр Михайлович, Волков Віктор Володимирович, Пашков Євген Валентинович, Калінін Михайло Іванович, Брехов Олександр Миколайович, Хаберленд Нільс Детлах, Пахалюк Володимир Іванович
Формула / Реферат
1. Динамічна транспедикулярної система, що складається зі стрижня, подовжньо закріпленого на тілах хребців за допомогою транспедикулярних гвинтів, який містить елемент, що дозволяє забезпечувати рухливість стабілізованого хребетного сегмента, яка відрізняється тим, що стрижень являє собою багатоланкову конструкцію, що складається щонайменше з трьох ланок, послідовно розташованих одна за одною та рухомо з'єднаних між собою, а саме - шарніра і двох порожнистих втулок, що мають пази різного розміру, один з яких виконаний у середній частині втулки для з'єднання з транспедикулярним гвинтом, що включає в себе різьбову частину з шийкою, профільованою, наприклад, у вигляді шестикутника, і головку, що являє собою симетрично зрізану з двох сторін сферу, діаметр якої дорівнює внутрішньому діаметру втулки, а два інших пази, виконані в кінцевих частинах втулки, служать для з'єднання з фіксуючими елементами, які кріпляться у відповідних пазах шарніра, розташованих в його кінцевих частинах, причому шарніром виступає короткий стрижень, зовнішній діаметр якого дорівнює внутрішньому діаметру втулки, а його середня частина являє собою сферу з діаметром, що перевищує внутрішній діаметр втулки.
2. Динамічна транспедикулярная система за п. 1, яка відрізняється тим, що розміри ланок, складаючих стрижень, і їх кількість можуть бути зміненими.
Текст
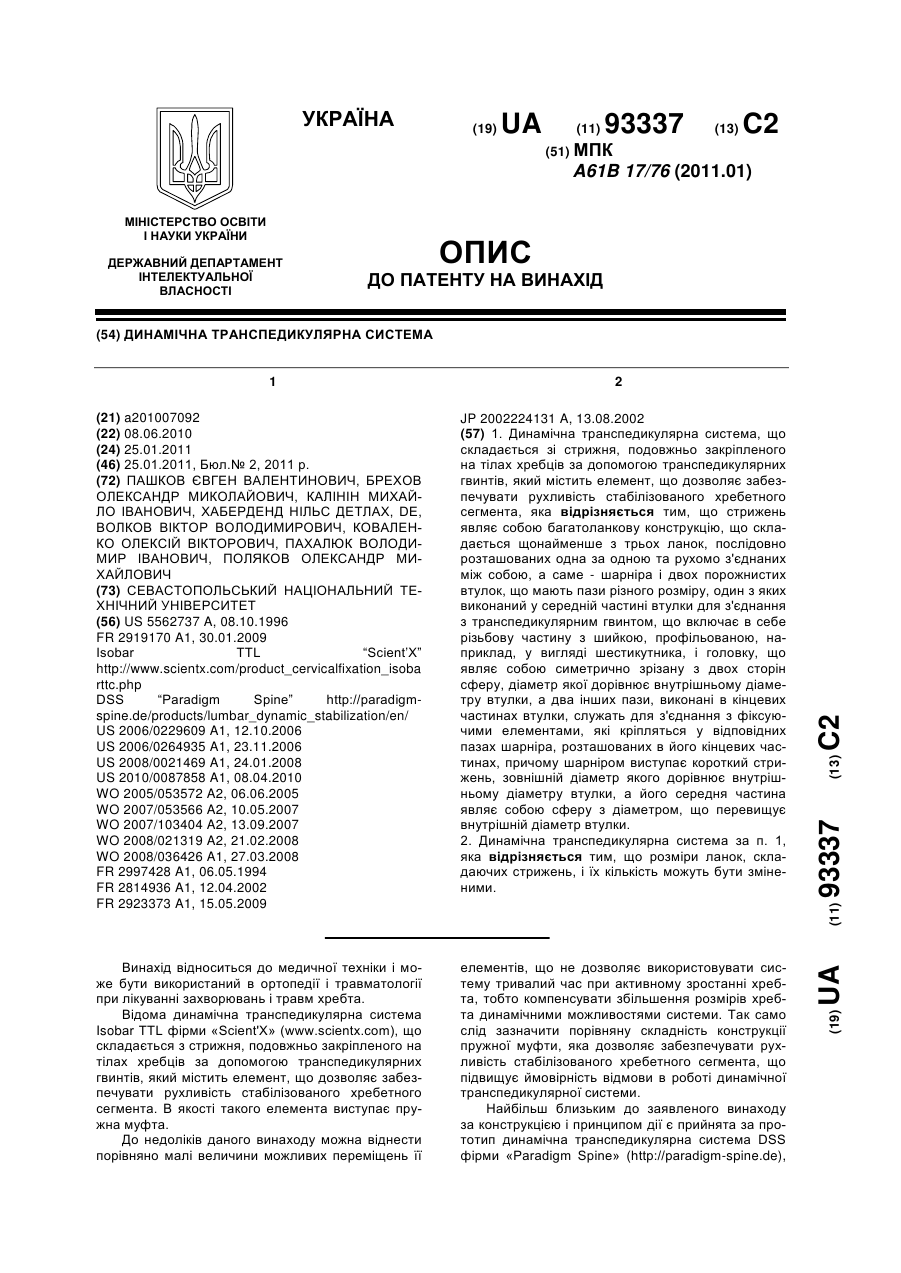
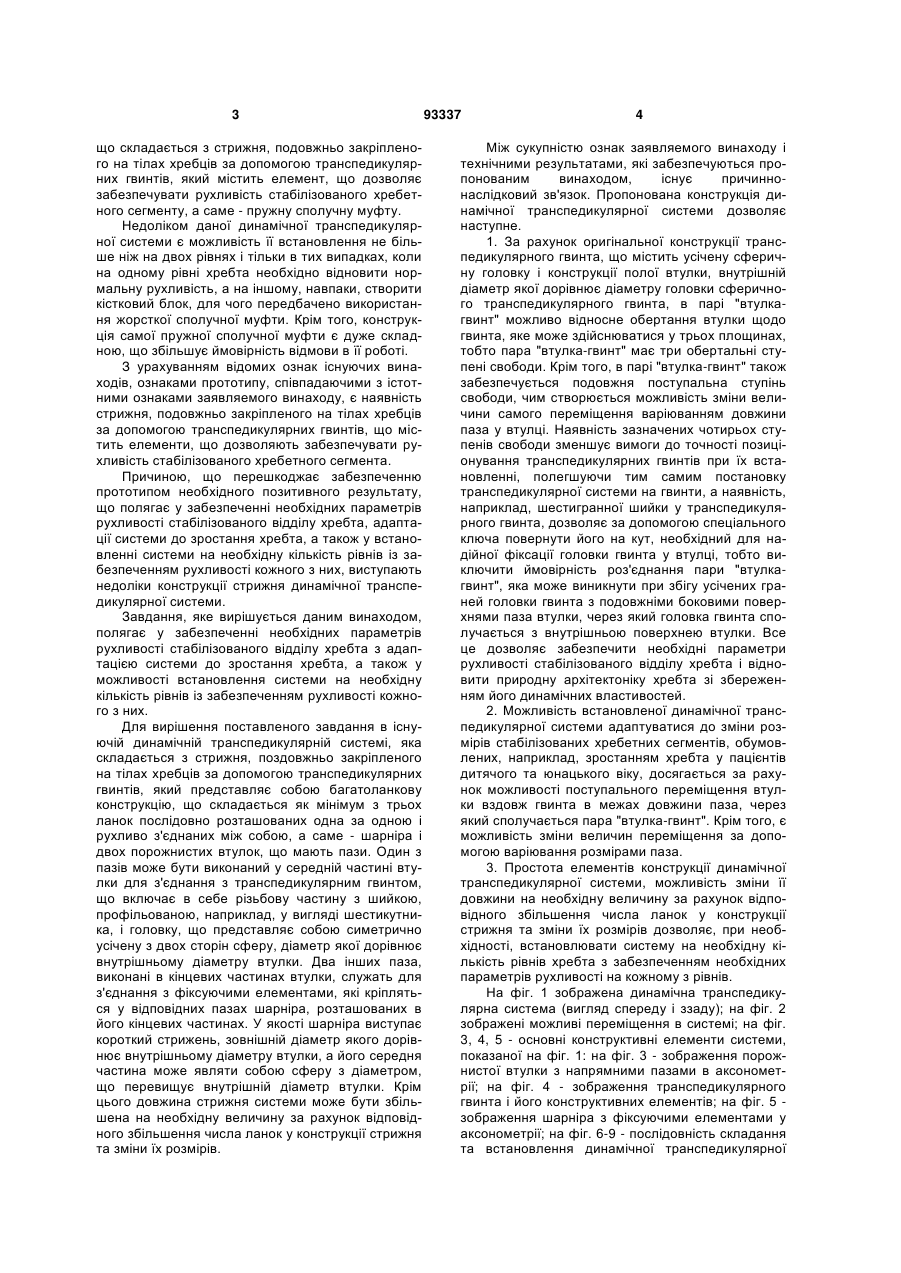
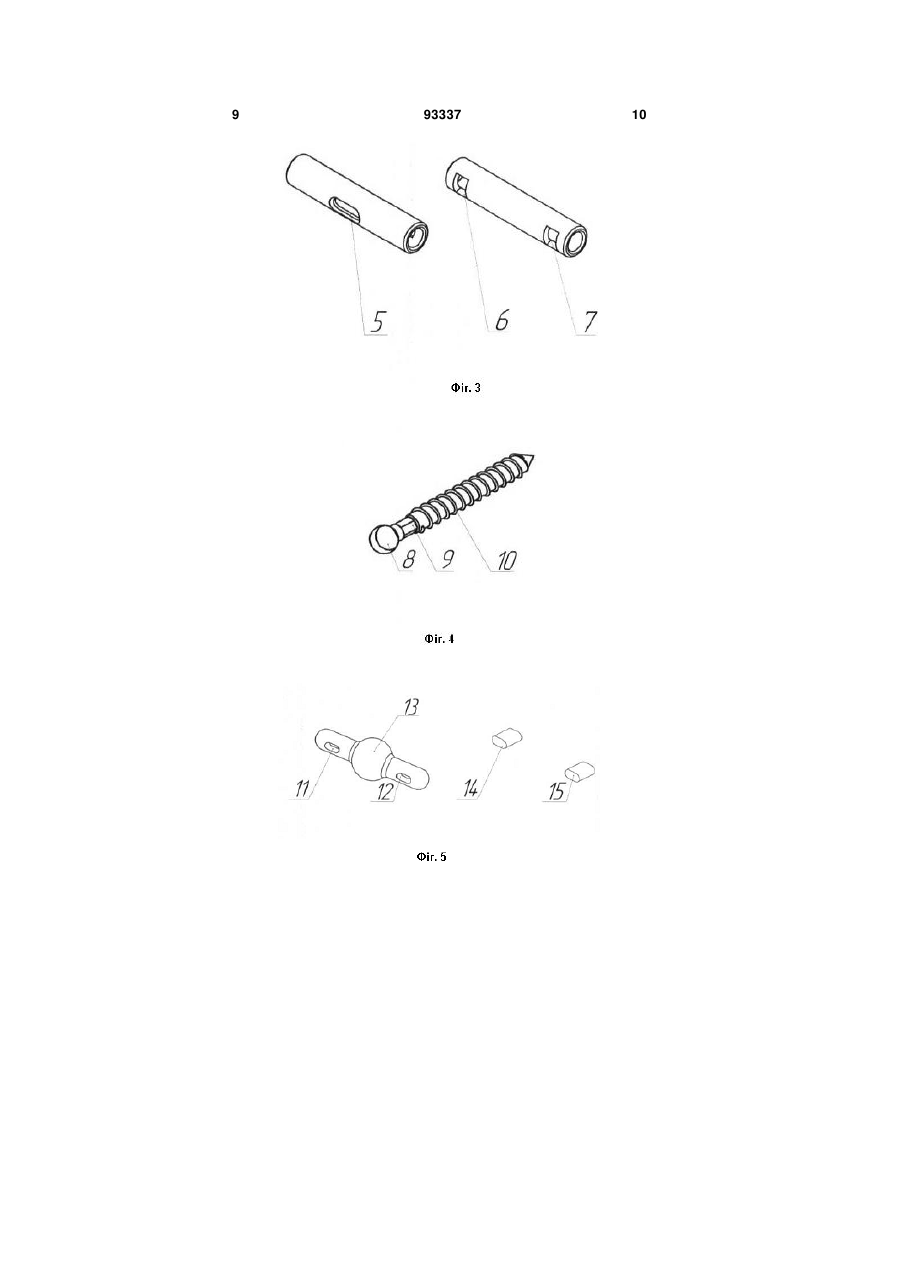
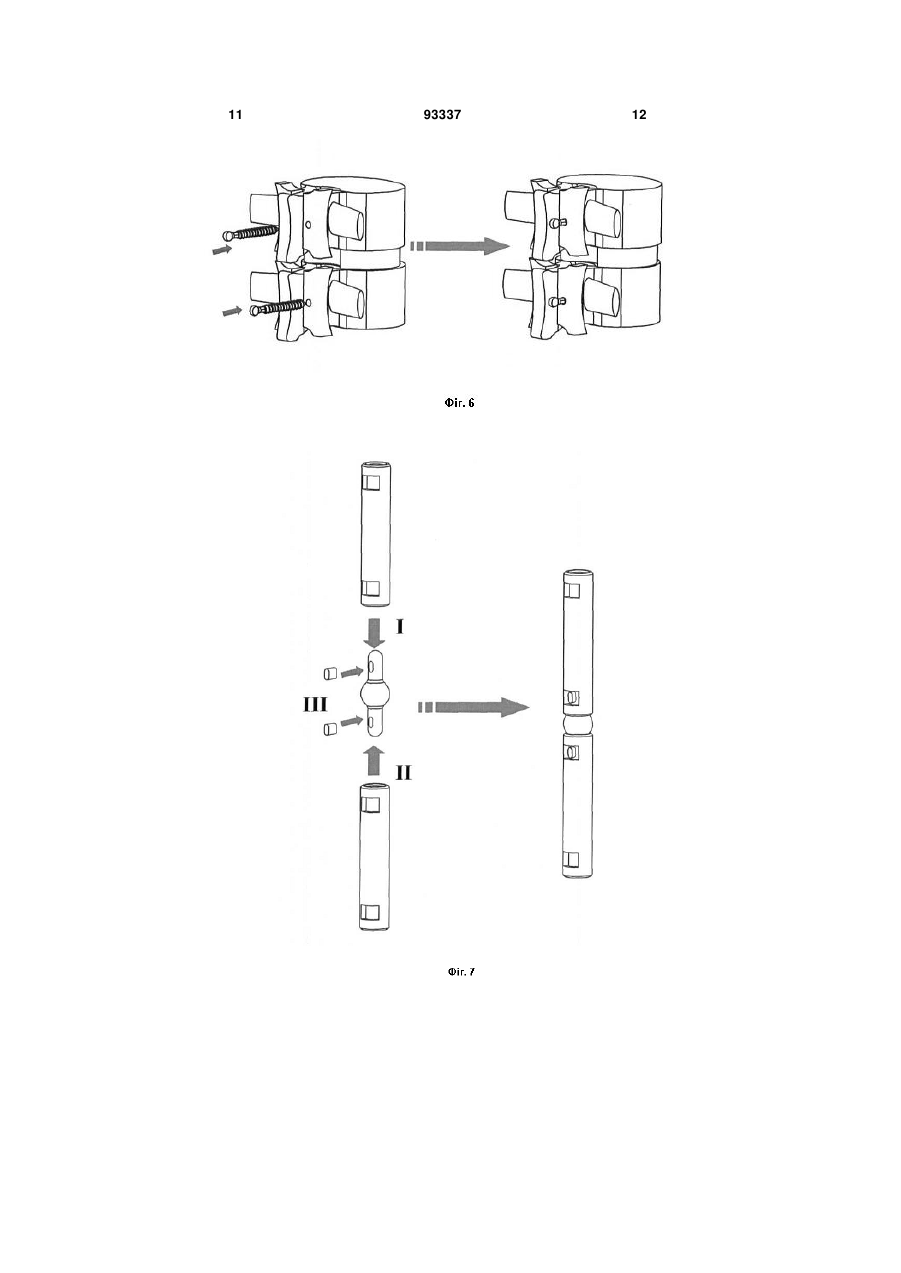
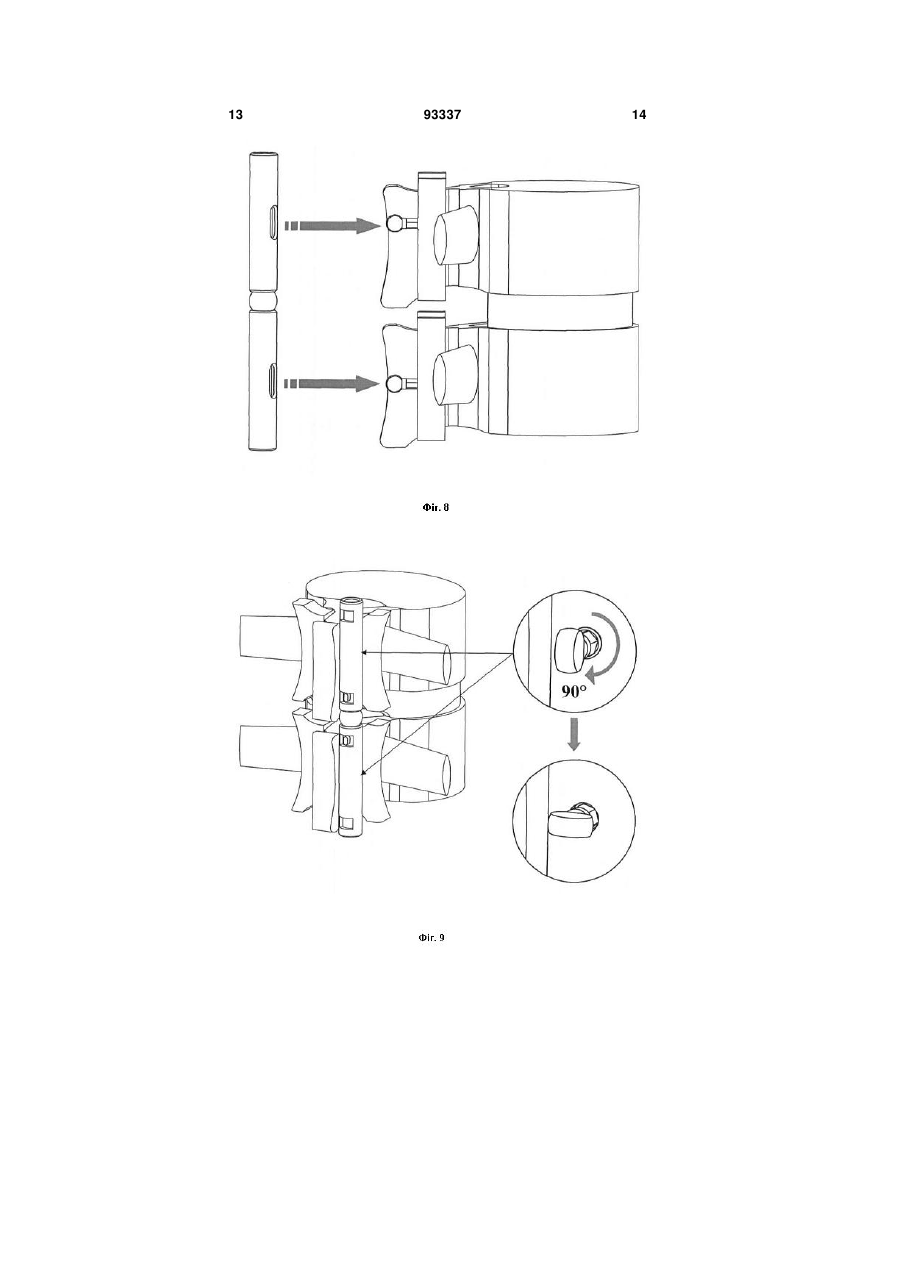
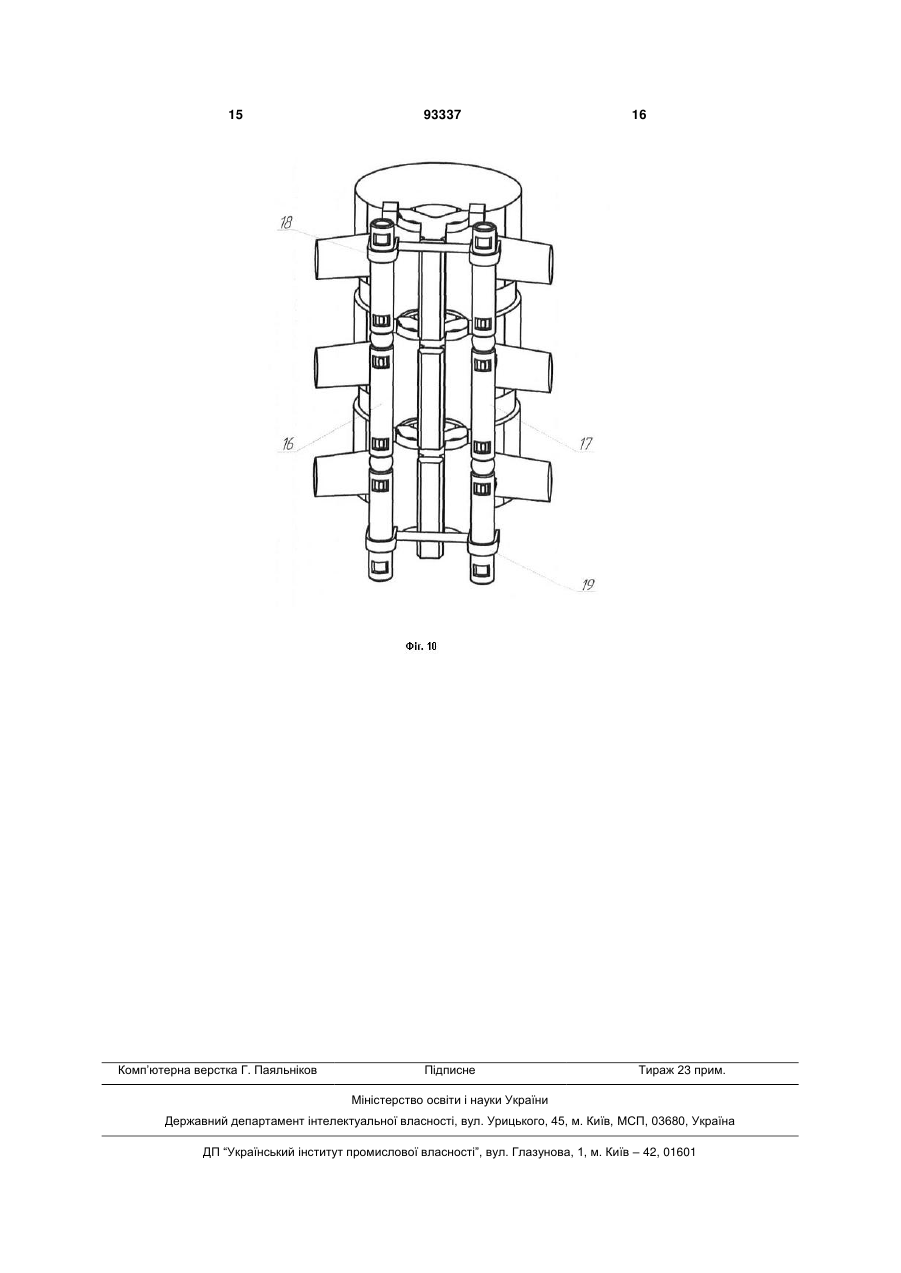
1. Динамічна транспедикулярна система, що складається зі стрижня, подовжньо закріпленого на тілах хребців за допомогою транспедикулярних гвинтів, який містить елемент, що дозволяє забезпечувати рухливість стабілізованого хребетного сегмента, яка відрізняється тим, що стрижень являє собою багатоланкову конструкцію, що складається щонайменше з трьох ланок, послідовно розташованих одна за одною та рухомо з'єднаних між собою, а саме - шарніра і двох порожнистих втулок, що мають пази різного розміру, один з яких виконаний у середній частині втулки для з'єднання з транспедикулярним гвинтом, що включає в себе різьбову частину з шийкою, профільованою, наприклад, у вигляді шестикутника, і головку, що являє собою симетрично зрізану з двох сторін сферу, діаметр якої дорівнює внутрішньому діаметру втулки, а два інших пази, виконані в кінцевих частинах втулки, служать для з'єднання з фіксуючими елементами, які кріпляться у відповідних пазах шарніра, розташованих в його кінцевих частинах, причому шарніром виступає короткий стрижень, зовнішній діаметр якого дорівнює внутрішньому діаметру втулки, а його середня частина являє собою сферу з діаметром, що перевищує внутрішній діаметр втулки. 2. Динамічна транспедикулярна система за п. 1, яка відрізняється тим, що розміри ланок, складаючих стрижень, і їх кількість можуть бути зміненими. UA (11) (21) a201007092 (22) 08.06.2010 (24) 25.01.2011 (46) 25.01.2011, Бюл.№ 2, 2011 р. (72) ПАШКОВ ЄВГЕН ВАЛЕНТИНОВИЧ, БРЕХОВ ОЛЕКСАНДР МИКОЛАЙОВИЧ, КАЛІНІН МИХАЙЛО ІВАНОВИЧ, ХАБЕРДЕНД НІЛЬС ДЕТЛАХ, DE, ВОЛКОВ ВІКТОР ВОЛОДИМИРОВИЧ, КОВАЛЕНКО ОЛЕКСІЙ ВІКТОРОВИЧ, ПАХАЛЮК ВОЛОДИМИР ІВАНОВИЧ, ПОЛЯКОВ ОЛЕКСАНДР МИХАЙЛОВИЧ (73) СЕВАСТОПОЛЬСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (56) US 5562737 A, 08.10.1996 FR 2919170 A1, 30.01.2009 Isobar TTL “Scient’X” http://www.scientx.com/product_cervicalfixation_isoba rttc.php DSS “Paradigm Spine” http://paradigmspine.de/products/lumbar_dynamic_stabilization/en/ US 2006/0229609 A1, 12.10.2006 US 2006/0264935 A1, 23.11.2006 US 2008/0021469 A1, 24.01.2008 US 2010/0087858 A1, 08.04.2010 WO 2005/053572 A2, 06.06.2005 WO 2007/053566 A2, 10.05.2007 WO 2007/103404 A2, 13.09.2007 WO 2008/021319 A2, 21.02.2008 WO 2008/036426 A1, 27.03.2008 FR 2997428 A1, 06.05.1994 FR 2814936 A1, 12.04.2002 FR 2923373 A1, 15.05.2009 C2 2 (19) 1 3 що складається з стрижня, подовжньо закріпленого на тілах хребців за допомогою транспедикулярних гвинтів, який містить елемент, що дозволяє забезпечувати рухливість стабілізованого хребетного сегменту, а саме - пружну сполучну муфту. Недоліком даної динамічної транспедикулярної системи є можливість її встановлення не більше ніж на двох рівнях і тільки в тих випадках, коли на одному рівні хребта необхідно відновити нормальну рухливість, а на іншому, навпаки, створити кістковий блок, для чого передбачено використання жорсткої сполучної муфти. Крім того, конструкція самої пружної сполучної муфти є дуже складною, що збільшує ймовірність відмови в її роботі. З урахуванням відомих ознак існуючих винаходів, ознаками прототипу, співпадаючими з істотними ознаками заявляемого винаходу, є наявність стрижня, подовжньо закріпленого на тілах хребців за допомогою транспедикулярних гвинтів, що містить елементи, що дозволяють забезпечувати рухливість стабілізованого хребетного сегмента. Причиною, що перешкоджає забезпеченню прототипом необхідного позитивного результату, що полягає у забезпеченні необхідних параметрів рухливості стабілізованого відділу хребта, адаптації системи до зростання хребта, а також у встановленні системи на необхідну кількість рівнів із забезпеченням рухливості кожного з них, виступають недоліки конструкції стрижня динамічної транспедикулярної системи. Завдання, яке вирішується даним винаходом, полягає у забезпеченні необхідних параметрів рухливості стабілізованого відділу хребта з адаптацією системи до зростання хребта, а також у можливості встановлення системи на необхідну кількість рівнів із забезпеченням рухливості кожного з них. Для вирішення поставленого завдання в існуючій динамічній транспедикулярній системі, яка складається з стрижня, поздовжньо закріпленого на тілах хребців за допомогою транспедикулярних гвинтів, який представляє собою багатоланкову конструкцію, що складається як мінімум з трьох ланок послідовно розташованих одна за одною і рухливо з'єднаних між собою, а саме - шарніра і двох порожнистих втулок, що мають пази. Один з пазів може бути виконаний у середній частині втулки для з'єднання з транспедикулярним гвинтом, що включає в себе різьбову частину з шийкою, профільованою, наприклад, у вигляді шестикутника, і головку, що представляє собою симетрично усічену з двох сторін сферу, діаметр якої дорівнює внутрішньому діаметру втулки. Два інших паза, виконані в кінцевих частинах втулки, служать для з'єднання з фіксуючими елементами, які кріпляться у відповідних пазах шарніра, розташованих в його кінцевих частинах. У якості шарніра виступає короткий стрижень, зовнішній діаметр якого дорівнює внутрішньому діаметру втулки, а його середня частина може являти собою сферу з діаметром, що перевищує внутрішній діаметр втулки. Крім цього довжина стрижня системи може бути збільшена на необхідну величину за рахунок відповідного збільшення числа ланок у конструкції стрижня та зміни їх розмірів. 93337 4 Між сукупністю ознак заявляемого винаходу і технічними результатами, які забезпечуються пропонованим винаходом, існує причиннонаслідковий зв'язок. Пропонована конструкція динамічної транспедикулярної системи дозволяє наступне. 1. За рахунок оригінальної конструкції транспедикулярного гвинта, що містить усічену сферичну головку і конструкції полої втулки, внутрішній діаметр якої дорівнює діаметру головки сферичного транспедикулярного гвинта, в парі "втулкагвинт" можливо відносне обертання втулки щодо гвинта, яке може здійснюватися у трьох площинах, тобто пара "втулка-гвинт" має три обертальні ступені свободи. Крім того, в парі "втулка-гвинт" також забезпечується подовжня поступальна ступінь свободи, чим створюється можливість зміни величини самого переміщення варіюванням довжини паза у втулці. Наявність зазначених чотирьох ступенів свободи зменшує вимоги до точності позиціонування транспедикулярних гвинтів при їх встановленні, полегшуючи тим самим постановку транспедикулярної системи на гвинти, а наявність, наприклад, шестигранної шийки у транспедикулярного гвинта, дозволяє за допомогою спеціального ключа повернути його на кут, необхідний для надійної фіксації головки гвинта у втулці, тобто виключити ймовірність роз'єднання пари "втулкагвинт", яка може виникнути при збігу усічених граней головки гвинта з подовжніми боковими поверхнями паза втулки, через який головка гвинта сполучається з внутрішньою поверхнею втулки. Все це дозволяє забезпечити необхідні параметри рухливості стабілізованого відділу хребта і відновити природну архітектоніку хребта зі збереженням його динамічних властивостей. 2. Можливість встановленої динамічної транспедикулярної системи адаптуватися до зміни розмірів стабілізованих хребетних сегментів, обумовлених, наприклад, зростанням хребта у пацієнтів дитячого та юнацького віку, досягається за рахунок можливості поступального переміщення втулки вздовж гвинта в межах довжини паза, через який сполучається пара "втулка-гвинт". Крім того, є можливість зміни величин переміщення за допомогою варіювання розмірами паза. 3. Простота елементів конструкції динамічної транспедикулярної системи, можливість зміни її довжини на необхідну величину за рахунок відповідного збільшення числа ланок у конструкції стрижня та зміни їх розмірів дозволяє, при необхідності, встановлювати систему на необхідну кількість рівнів хребта з забезпеченням необхідних параметрів рухливості на кожному з рівнів. На фіг. 1 зображена динамічна транспедикулярна система (вигляд спереду і ззаду); на фіг. 2 зображені можливі переміщення в системі; на фіг. 3, 4, 5 - основні конструктивні елементи системи, показаної на фіг. 1: на фіг. 3 - зображення порожнистої втулки з напрямними пазами в аксонометрії; на фіг. 4 - зображення транспедикулярного гвинта і його конструктивних елементів; на фіг. 5 зображення шарніра з фіксуючими елементами у аксонометрії; на фіг. 6-9 - послідовність складання та встановлення динамічної транспедикулярної 5 системи; на фіг. 10 - варіант установки системи в декількох рівнях з використанням стандартних поперечних балок (зображені спрощено). Динамічна транспедикулярна система, зображена на фіг. 1, складається з стрижня, сполученого з транспедикулярними гвинтами, який представляє собою багатоланкову конструкцію, що складається як мінімум з трьох ланок послідовно розташованих одна за одною і рухливо з'єднаних між собою, а саме - шарніра 2 і двох порожнистих втулок 1 і 4, що мають пази. Один з пазів, наприклад 5 (фіг. 3), може бути виконаний у середній частині втулки для з'єднання з транспедикулярним гвинтом 3 (фіг. 4) включає в себе різьбову частину 10, шийку 9, яка може бути виконана, наприклад, у вигляді шестикутника, і головку 8, що представляє собою симетрично усічену з двох сторін сферу, діаметр якої дорівнює внутрішньому діаметру втулки, забезпечуючи поздовжнє переміщення і обертання гвинта 3 в межах розмірів паза щодо втулки. Два іншихпаза 6 і 7 (фіг. 3), виконаних у кінцевих частинах втулки, служать для з'єднання з фіксуючими елементами 14 і 15 (фіг. 5), які кріпляться у відповідних пазах 11 і 12 шарніра, розташованих в його кінцевих частинах, забезпечуючи обертальний рух втулки у межах ширини паза щодо самого шарніра, що представляє собою короткий стрижень, зовнішній діаметр якого дорівнює внутрішньому діаметру трубки, а його середня частина 13 (фіг. 5) може являти собою сферу з діаметром, що перевищує внутрішній діаметр втулки. Перед встановленням динамічної транспедикулярної системи роблять попереднє складання стрижня з ланок 1, 2, 4 необхідного типорозміру, після чого його моделюють, щоб він прийняв кривизну, обумовлену архітектонікою хребта в даному стабілізованому сегменті. Процес і послідовність зборки стрижня показані на фіг. 7.: 1. На верхню частину шарніра 2 встановлюють першу втулку 1 (позиція І на фіг. 7). Зовнішню циліндричну поверхню кінцевої частини шарніра сполучають з внутрішньою циліндричною поверхнею порожнистої втулки. 2. Аналогічно з попереднім пунктом роблять сполучення з шарніром другої втулки 4 (позиція II на фіг. 7). 3. Зібраний шарнір 2 і дві втулки 1 і 4 поєднують у стрижень за допомогою фіксуючих елементів 14 і 15, які кріплять в пазах 11 і 12 (позиція III на 93337 6 фіг. 7). Встановлюють динамічну транспедикулярну систему після проведення транспедикулярних гвинтів 3 через ніжки (педикули) хребця в його тіло (фіг. 6). При цьому головки гвинтів повертають таким чином, щоб усічені частини цих сферичних головок були приблизно паралельні подовжньої осі хребта. Після попереднього збирання і моделювання зібраний стрижень встановлюють на транспедикулярні гвинти 3 (фіг. 8), які знаходяться в тілах хребців. Через подовжні пази 5 головки 8 гвинтів сполучаються з внутрішніми поверхнями втулок 1 і 4. Якщо транспедикулярні гвинти встановлені не на одній прямій, а їх голівки повернуті на незначний кут, то стрижень може самовстановлюватися за рахунок наявності обертальних ступенів свободи в парах "шарнір-втулка" (фіг. 2). Встановлений на головки гвинтів стрижень фіксують від можливого роз'єднання в парі "втулкагвинт" (фіг. 9). Цю операцію проводять за допомогою спеціального ключа (не показаний), яким за шийку 9 гвинта повертають його відносно початкового положення на достатній для надійної фіксації кут, наприклад, на 90 градусів. Також у конструкції динамічної транспедикулярної системи можуть бути враховані анатомічні особливості хребта окремих пацієнтів, виявлених на стадії планування операції. Це може виражатися в тому, що для стабілізації декількох рівнів хребта система може містити два стрижня 16 і 17 (фіг. 10), симетрично встановлених по обидва боки хребців. Разом з тим, ці два стрижня можуть бути з'єднані в одному або декількох місцях стандартними поперечними балками 18 і 19 (показані спрощено), тобто система буде представляти рамну конструкцію, внаслідок чого буде збільшена жорсткість динамічної транспедикулярної системи. Крім цього, ланки конструкції транспедикулярної системи можуть бути виконані різних розмірів. Розміри пазів, виконаних у втулках балки, також можуть бути різними для урахування особливостей архітектоніки хребта. За рахунок описаних особливостей конструкції динамічної транспедикулярної системи і створюється позитивний ефект, що полягає у забезпеченні необхідних параметрів рухливості стабілізованого відділу хребта з адаптацією системи до зростання хребта, а також у можливості встановлення системи на необхідну кількість рівнів із забезпеченням рухливості кожного з них. 7 93337 8 9 93337 10 11 93337 12 13 93337 14 15 Комп’ютерна верстка Г. Паяльніков 93337 Підписне 16 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDynamic transpedicular system
Автори англійськоюPashkov Yevhen Valentynovych, Brekhov Oleksandr Mykolaiovych, Kalinin Myhailo Ivanovych, Khaberlend Nils Detlakh, Volkov Viktor Volodymyrovych, Kovalenko Oleksii Viktorovych, Pahaliuk Volodymyr Ivanovych, Poliakov Oleksandr Mykhailoych
Назва патенту російськоюДинамическая транспедикулярная система
Автори російськоюПашков Евгений Валентинович, Брехов Александр Николаевич, Калинин Михаил Иванович, Хабэрлэнд Нильс Дэтлах, Волков Виктор Владимирович, Коваленко Алексей Викторович, Пахалюк Владимир Иванович, Поляков Александр Михайлович
МПК / Мітки
МПК: A61B 17/76
Мітки: транспедикулярна, динамічна, система
Код посилання
<a href="https://ua.patents.su/8-93337-dinamichna-transpedikulyarna-sistema.html" target="_blank" rel="follow" title="База патентів України">Динамічна транспедикулярна система</a>
Транспедикулярна система фіксації хребта
Номер патенту: 65153
Опубліковано: 15.03.2004
Автори: Слинько Євгеній Ігорович, Вербов Вадим Віталійович, Лобунько Віктор Васильович, Деркач Валерій Михайлович, Зозуля Юрій Панасович, Гончаренко Анатолій Федорович
МПК: A61B 17/70
Мітки: хребта, транспедикулярна, фіксації, система
Формула / Реферат:
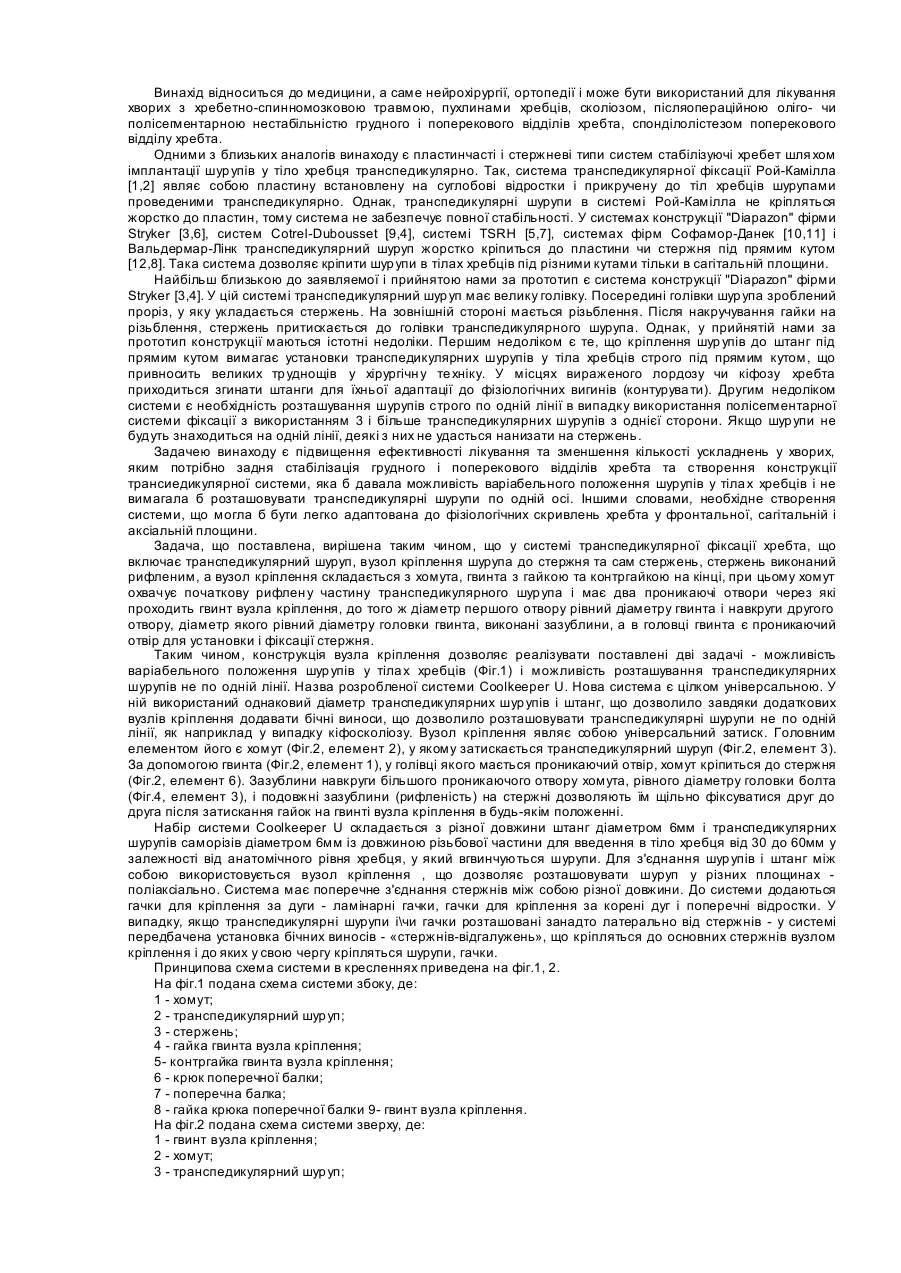
Система транспедикулярної фіксації хребта, що включає транспедикулярний шуруп, вузол кріплення шурупа до стержня і стержень, яка відрізняється тим, що стержень виконаний рифленим, а вузол кріплення складається з хомута і гвинта з гайкою та контргайкою на кінці, при цьому хомут охоплює початкову рифлену частину транспедикулярного шурупа і має два наскрізні отвори, через які проходить гвинт вузла кріплення, діаметр першого отвору дорівнює...
Платформа динамічна
Номер патенту: 1376
Опубліковано: 15.08.2002
Автори: Магерамов Лютфалій Курбан-Алієвич, Бусяк Юрій Митрофанович, Смоляков Василь Андрійович, Гулевський Юрій Володимирович
МПК: G01M 1/02, G09B 9/02, G09B 9/00, G01M 1/00, G09B 9/04
Формула / Реферат:
Платформа динамічна, яка містить площадку, що закріплена на основі за допомогою пружної підвіски і кінематично зв’язана з основою за допомогою механізмів хитання, які включають шарнірні з’єднання, яка відрізняється тим, що площадка з`єднана з механізмами хитання за допомогою щонайменше трьох шарнірних з’єднань, пружна підвіска оснащена похилим важелем, один кінець якого сполучений із площадкою за допомогою карданного шарніра, розміщеного в...
Динамічна дробарка

Номер патенту: 16823
Опубліковано: 15.08.2006
Автори: Пологович Ірина Анатоліївна, Пологович Анатолій Іванович
МПК: B02C 21/00, B02C 1/00
Формула / Реферат:
1. Динамічна дробарка, що містить установлений на основі на амортизаційних опорах корпус із завантажувальною і розвантажувальною лійками і розташованою в ньому вертикальною подрібнювальною камерою, що утворена системою поярусно розміщених у корпусі дисків з наскрізними отворами, причому диск нижнього ярусу у верхній частині виконаний з конічним виступом, що входить із зазором в отвір диска ярусу, що розташований вище, і закріплений у корпусі...
Коливальна система
Номер патенту: 6979
Опубліковано: 15.06.2005
Автори: Галь Анатолій Феодосійович, Снігур Анатолій Кирилович, Попов Андрій Кірович
МПК: F16F 15/00
Мітки: коливальна, система
Формула / Реферат:
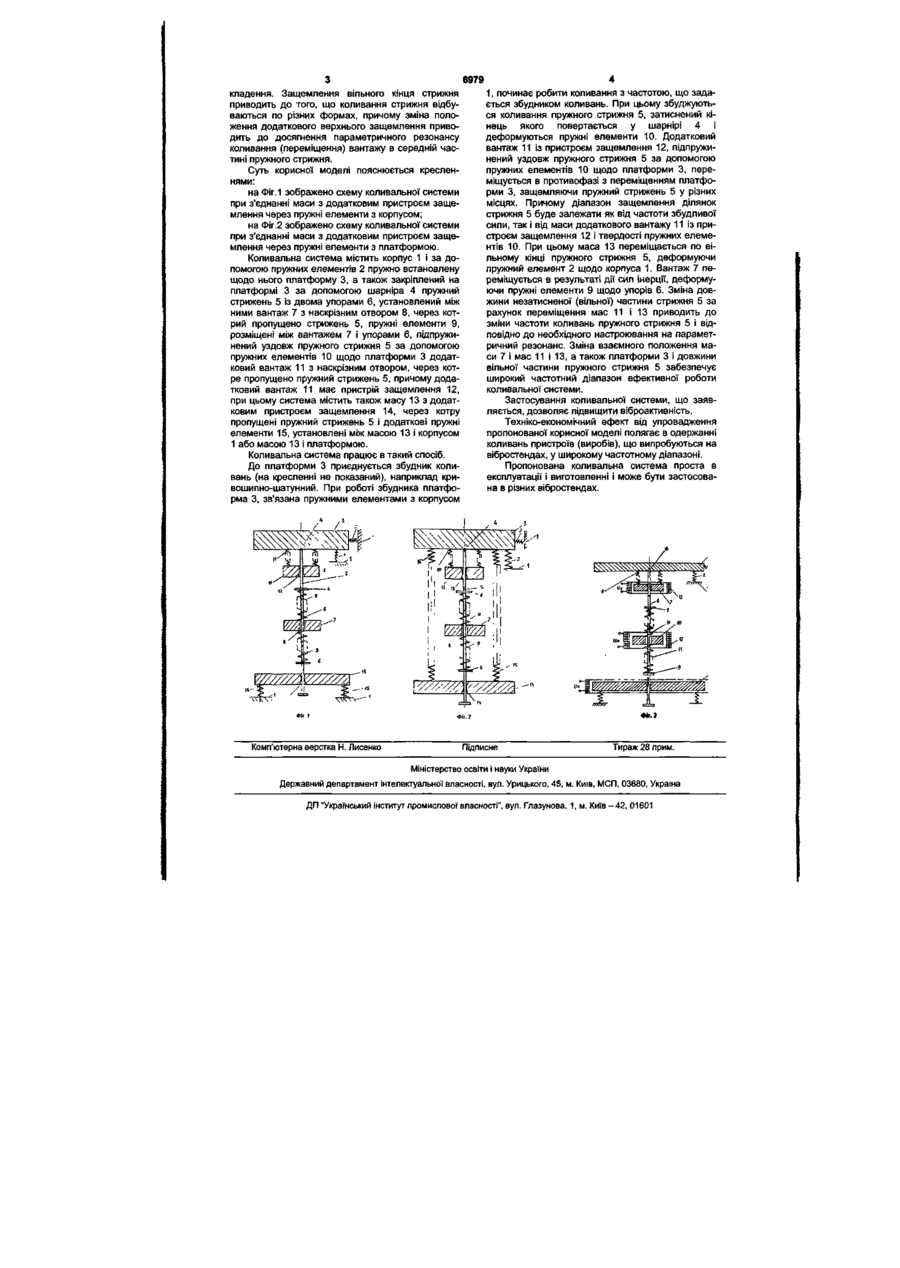
Коливальна система, що містить корпус, пружно встановлену щодо нього платформу, закріплений на ній шарнірно пружний стрижень з двома упорами, установлений між ними вантаж з наскрізним отвором, через котрий пропущено стрижень, пружні елементи, розміщені між вантажем і упорами, і підпружинений уздовж пружного стрижня щодо платформи додатковий вантаж з наскрізним отвором, через котрий пропущено пружний стрижень, який відрізняється тим, що...
Стрижень для інтрамедулярної фіксації переломів діафізів трубчастих кісток
Номер патенту: 42521
Опубліковано: 10.07.2009
Автор: Климовицький Володимир Гарійович
МПК: A61B 17/70
Мітки: кісток, фіксації, трубчастих, стрижень, діафізів, інтрамедулярної, переломів
Формула / Реферат:
Стрижень для інтрамедулярної фіксації переломів діафізів трубчастих кісток, що містить отвори для блокуючих гвинтів, який відрізняється тим, що отвори для блокуючих гвинтів оснащені різьбою для перешкоджання зсувам стрижня щодо гвинтів.
Попередній патент: Пристрій керування та захисту електроустаткування
Наступний патент: Тазостегновий шарнір
Випадковий патент: Механізм навіски штанги обприскувача