Пристрій регулювання збудження синхронного двигуна в умовах різкозмінного навантаження
Номер патенту: 93704
Опубліковано: 10.10.2014
Автори: Качалка Вадим Юрійович, Синяговський Дмитро Валерійович, Слободенюк Дмитро Володимирович, Бялобржеський Олексій Володимирович


Формула / Реферат
Пристрій регулювання збудженняφ синхронного двигуна в умовах різкозмінного навантаження, що складається з синхронного двигуна з обмоткою збудження, блока обчислення активної та реактивної складових струму статора, перший вхід якого підключений до блока обчислення струму статора, вхід якого з'єднано з виходом датчика струму статора, другий вхід блока визначення активної та реактивної складових струму статора з'єднаний з виходом блока визначення кута φ, перший вхід якого з'єднано з виходом датчика струму статора, а другий вхід з'єднано з датчиком напруги статора, перший вихід блока визначення активної та реактивної складових струму статора з'єднаний з третім входом блока перетворення координат, другий вихід блока визначення активної та реактивної складових струму статора з'єднаний з четвертим входом блока перетворення координат і з першим входом блока визначення реактивної потужності, другий вхід якого з'єднано з виходом блока обчислення напруги, вхід якого з'єднано з виходом датчика напруги, перший вхід блока перетворення координат з'єднаний з першим виходом блока розрахунку внутрішнього кута та його похідних, другий вхід блоку перетворення координат з'єднаний з виходом блока обчислення напруги статора, перший вихід блока перетворення координат з'єднаний з третім входом блока оцінки електрорушійної сили і з четвертим входом блока формування напруги регулятора, другий вихід з'єднаний з четвертим входом блока оцінки електрорушійної сили і з п’ятим входом блока формування напруги регулятора збудження, перший вхід блока оцінки електрорушійної сили з'єднаний з виходом блока синхронної кутової частоти ![]() , другий вхід блока оцінки електрорушійної сили з'єднаний з виходом датчика струму ротора, перший вихід блока оцінки електрорушійної сили з'єднаний з першим входом блока розрахунку внутрішнього кута та його похідних, другий вихід блока оцінки електрорушійної сили з'єднано з другим входом блока розрахунку внутрішнього кута та його похідних, перший вихід якого з'єднано з першим входом блока формування напруги регулятора збудження, другий вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з другим входом блока формування напруги регулятора збудження, третій вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з третім входом блока формування напруги регулятора збудження, шостий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока визначення реактивної потужності, сьомий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібної постійної часу затухання коливань ротора, восьмий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання сумарної постійної часу ротора і виконуючого механізму, дев'ятий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібного значення реактивної потужності, який відрізняється тим, що паралельно обмотці збудження через датчик струму ротора та буферний дросель, підключений транзисторний перетворювач, до виходу якого приєднано накопичувальний конденсатор, вихід блока формування напруги регулятора збудження з'єднано з другим входом блока керування транзисторним і тиристорним перетворювачем, перший вхід якого з'єднаний з виходом датчика струму ротора, перший вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом транзисторного перетворювача, другий вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом тиристорного перетворювача, який через понижуючий трансформатор з'єднаний з мережею.
, другий вхід блока оцінки електрорушійної сили з'єднаний з виходом датчика струму ротора, перший вихід блока оцінки електрорушійної сили з'єднаний з першим входом блока розрахунку внутрішнього кута та його похідних, другий вихід блока оцінки електрорушійної сили з'єднано з другим входом блока розрахунку внутрішнього кута та його похідних, перший вихід якого з'єднано з першим входом блока формування напруги регулятора збудження, другий вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з другим входом блока формування напруги регулятора збудження, третій вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з третім входом блока формування напруги регулятора збудження, шостий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока визначення реактивної потужності, сьомий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібної постійної часу затухання коливань ротора, восьмий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання сумарної постійної часу ротора і виконуючого механізму, дев'ятий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібного значення реактивної потужності, який відрізняється тим, що паралельно обмотці збудження через датчик струму ротора та буферний дросель, підключений транзисторний перетворювач, до виходу якого приєднано накопичувальний конденсатор, вихід блока формування напруги регулятора збудження з'єднано з другим входом блока керування транзисторним і тиристорним перетворювачем, перший вхід якого з'єднаний з виходом датчика струму ротора, перший вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом транзисторного перетворювача, другий вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом тиристорного перетворювача, який через понижуючий трансформатор з'єднаний з мережею.
Текст
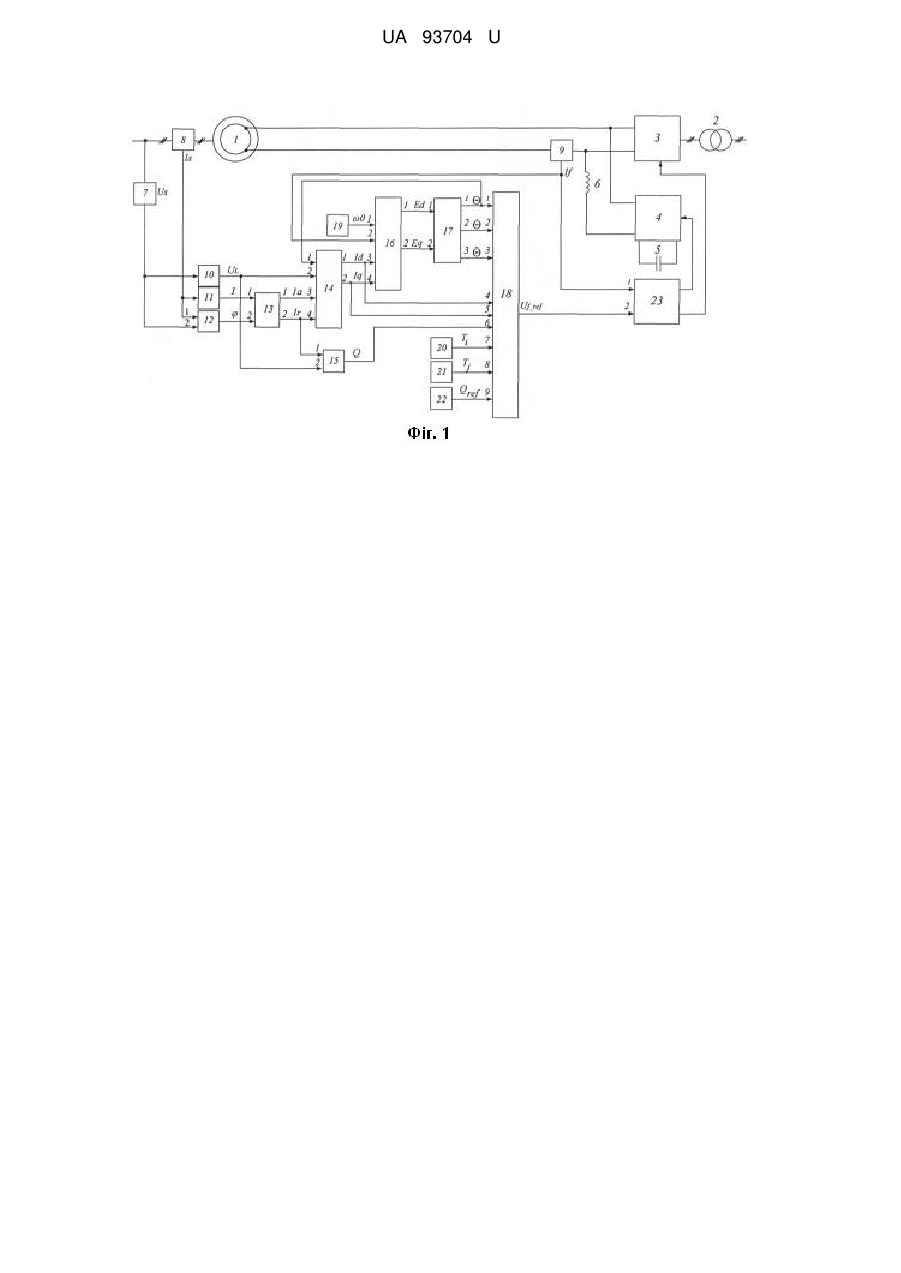
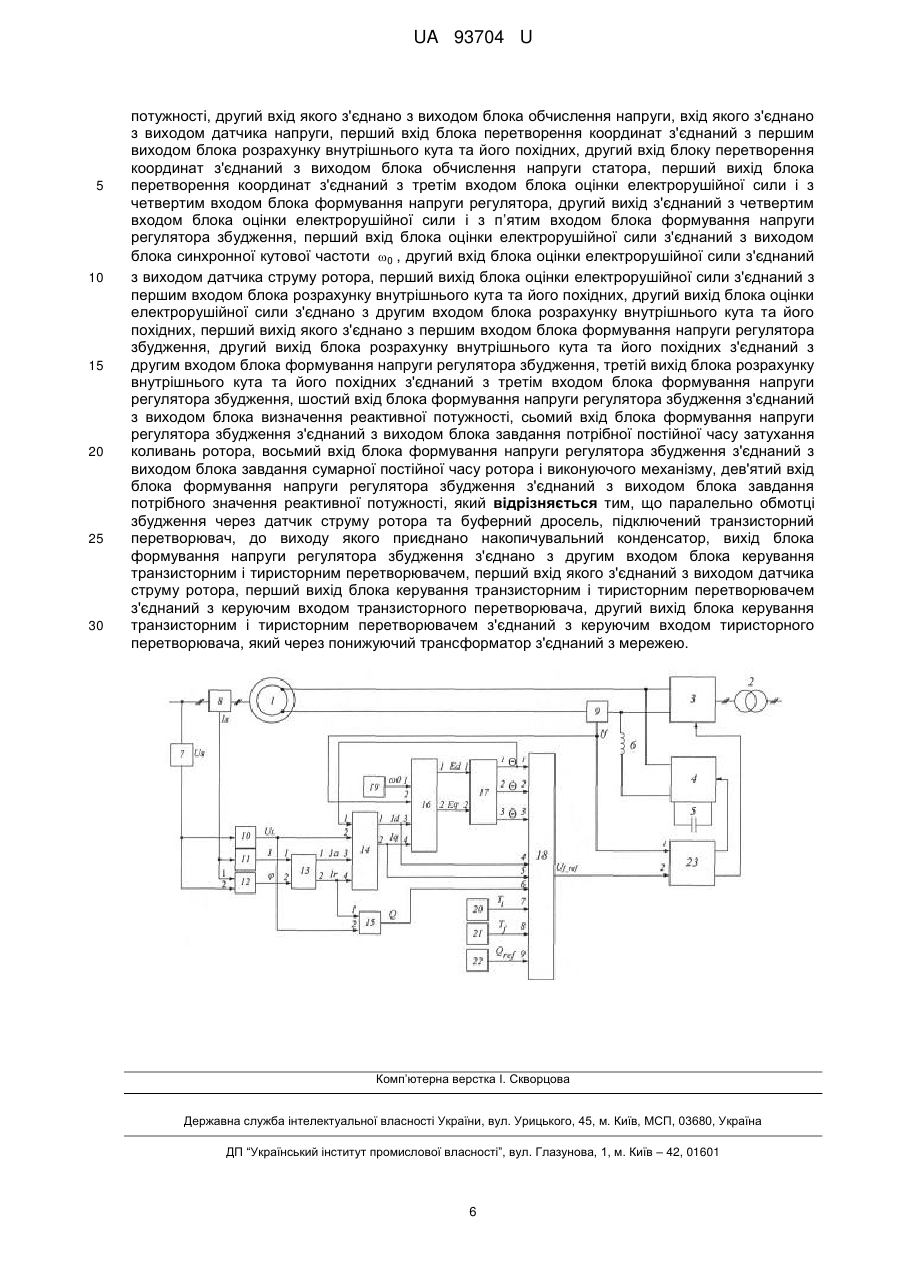
Реферат: Пристрій регулювання збудження синхронного двигуна в умовах різкозмінного навантаження складається з синхронного двигуна з обмоткою збудження, блока обчислення активної та реактивної складових струму статора. Паралельно обмотці збудження через датчик струму ротора та буферний дросель, підключений транзисторний перетворювач, до виходу якого приєднано накопичувальний конденсатор, вихід блока формування напруги регулятора збудження з'єднано з другим входом блока керування транзисторним і тиристорним перетворювачем, перший вхід якого з'єднаний з виходом датчика струму ротора, перший вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом транзисторного перетворювача, другий вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом тиристорного перетворювача, який через понижуючий трансформатор з'єднаний з мережею. UA 93704 U (12) UA 93704 U UA 93704 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки і може бути використана для підвищення стійкості привідних синхронних двигунів кар'єрних екскаваторів та для ефективного гасіння коливань ротора синхронних двигунів, що працюють в умовах різкозмінного навантаження. Відоме технічне рішення [Патент UA, № 99548, МПК Н02Р 9/12 Н02Н 7/09, 2011. Пристрій для гасіння магнітного поля при відключенні обмотки збудження синхронної машини від джерела живлення, Гвоздев В.П., Власенко П.В., Савлучинський Р.В.], що містить комутаційний апарат, включений послідовно з джерелом живлення і обмоткою збудження, а також підключений паралельно обмотці збудження ланцюг, що складається з послідовно включених активного лінійного опору і ланцюга, який містить паралельні зустрічно включені два тиристори або тиристор і діод, відрізняється тим, що містить ланцюг з низьким опором у вигляді або підключеного паралельно обмотці збудження ланцюга, що містить керований ключ, або підключеного паралельно активному опору ланцюга, що містить послідовно включені діод або тиристор і ємнісний елемент, переважно поляризований конденсатор, при цьому паралельно ємнісному елементу підключений розрядний резистор. Спільними ознаками аналога та пристрою, що заявляється, є: застосування транзисторів як ключових елементів, конденсатор для накопичення енергії. Недоліком являється розсіювання електромагнітної енергії на резисторах, велика постійна часу контуру "обмотка збудження - конденсатор". Відоме технічне рішення [Патент UA, № 98412, МПК Н02Р 1/50 Н02Р 1/46 Н02К 19/02, 2011. Спосіб пуску синхронного двигуна, Нізімов В.Б., Количев С.В., Сніжко А.А.], при якому синхронний двигун підключають до мережі змінного струму через тиристорний перетворювач, обмотку збудження підключають до пускового резистора, подають в обмотки статора імпульси струму, величина і тривалість яких формується різницею між дійсною і заданою величинами пускового струму статора, впливом на тиристорний перетворювач виконують заряд ємнісного накопичувача енергії від обмотки збудження через пусковий резистор, контролюють величину напруги на ємнісному накопичувачі енергії і, при досягненні на ньому напруги заданої величини, вмикають додатковий резистор, на який потім розряджають ємнісний накопичувач, який відрізняється тим, що контролюють частоту обертання ротора і при досягненні нею величини, близької до напівсинхронної, наприклад до (0,45...0,5)0 , від'єднують ємнісний накопичувач енергії та додатковий резистор від обмотки збудження, при цьому опір пускового резистора зменшують, наприклад, в два рази. Спільними ознаками аналога та пристрою, що заявляється, є: транзисторний перетворювач, конденсатор для накопичення енергії. Недоліками являються використання резисторів, що призводить до додаткових втрат та багатоступеневий накопичувач енергії. Відоме технічне рішення [Патент UA, № 70760, МПК Н02Р 9/14, 2011. Електронна система збудження турбогенератора, Родінков В.І., Коваль A.M., Лихогляд М.Ю.], що містить керовані випрямлячі під'єднані до вимірювального трансформатора входом, з'єднаним з генератором, яка відрізняється тим, що як генератор використаний турбогенератор, крім того в неї введено контролер, що з'єднаний з першим керованим випрямлячем, який під'єднаний до першого вимірювального трансформатора, який входом з'єднаний з турбогенератором, другий керований випрямляч під'єднаний до трансформатора струму, який входом з'єднаний з турбогенератором, на виході контролера під'єднано два драйвери, які виходами з'єднані з двома транзисторами відповідно, до виходу контролера паралельно під'єднано акумуляторну батарею, яка паралельно під'єднана до виходу першого керованого випрямляча та до виходу другого транзистора, другий транзистор послідовно з'єднаний з першим транзистором, що через резистор послідовно з'єднаний з обмоткою збудження, третій вимірювальний трансформатор, що з'єднаний з районною електричною мережею, під'єднаний до входу контролера через третій керований випрямляч та до виходу першого керованого випрямляча. Спільними ознаками технічного рішення та пристрою є наявність вимірювального датчика струму статора, використання додаткового джерела живлення обмотки збудження, контролер управління, контроль напруги статора і ротора, наявність конденсатора як джерела живлення обмотки збудження. Недоліками даного винаходу є використання як контролюючих приладів трансформаторів струму та напруги, що призводить до зниження точності системи регулювання; наявність обернено ввімкнених діодів, наявність регулювальних опорів, що призводить до додаткових втрат електроенергії. Найбільш близьким до корисної моделі, що заявляється, є технічне рішення [Патент RU, № 2289126, МПК Н02Р 21/06, 21/14, 2006. Пристрій регулювання збудження синхронного двигуна, Абрамов А.И., Белоконь С.А., Золотухин Ю.М., Колодей В.В., Михальцов Э.Г., Нестеров А.А., 1 UA 93704 U 5 Собстель Г.М., Терентьев С.А., Ян А.П.], який містить вимірювач діючого значення напруги статора синхронного двигуна, вимірювач діючого значення струму статора синхронного двигуна, вимірювач кута і вимірювач струму ротора, що відрізняється тим, що в регулятор додатково введені блок обчислення активної і реактивної складових струму статора, блок перетворення координат, блок обчислення реактивної потужності, блок оцінки електрорушійної сили двигуна, блок обчислення внутрішнього кута двигуна і його першої та другої похідних і перший формуючий блок для обчислення напруги Uas і другий формуючий блок для обчислення 10 15 20 25 30 напруги U f причому перший вхід блока обчислення активної і реактивної складових струму статора підключений до виходу вимірювача діючого значення струму статора, другий - до виходу вимірювача кута ; перший вихід блока обчислення активної і реактивної складових струму статора пов'язаних з третім входом блока перетворення координат, другий вихід пов'язаний з четвертим входом блока перетворення координат і з першим входом блока обчислення реактивної потужності двигуна; перший вхід блока перетворення координат підключений до першого виходу блока обчислення внутрішнього кута двигуна , другий вхід блока перетворення координат підключений до виходу вимірювача діючого значення напруги статора; перший вихід блока перетворення координат пов'язаний з третім входом блока оцінки електрорушійної сили двигуна і з четвертим входом першого формуючого блока, другий вихід блока перетворення координат пов'язаний з четвертим входом блока оцінки електрорушійної сили двигуна і з п'ятим входом першого формуючого блока; другий вхід блока обчислення реактивної потужності двигуна підключений до виходу вимірювача діючого значення напруги статора, вихід блока обчислення реактивної потужності двигуна з шостим входом першого формуючого блока; перший вхід блока оцінки електрорушійної сили двигуна пов'язаний з виходом блока синхронної кутової частоти 0 , другий вхід блока оцінки електрорушійної сили двигуна підключений до виходу вимірювача струму ротора; перший вихід блока оцінки електрорушійної сили двигуна пов'язаний з першим входом блока обчислення внутрішнього кута двигуна і його похідних, другий вихід блока оцінки електрорушійної сили двигуна пов'язаний з другим входом блока обчислення внутрішнього кута двигуна і його похідних; перший вихід блока обчислення внутрішнього кута двигуна і його похідних підключений до першого входу блока перетворення координат і до першого входу першого формуючого блока, другий вихід - до другого входу першого формуючого блока, третій вихід пов'язаний з третім входом першого формуючого блока; сьомий вхід першого формуючого блока пов'язаний з виходом блока константи T1 , восьмий вхід першого формуючого блока підключений до виходу блока константи Tj дев'ятий вхід формуючого блока підключений до виходу блока константи С, 35 40 45 50 55 десятий вхід першого формуючого блока підключений до виходу блока константи Qref ; вихід першого формуючого блока пов'язаний з другим входом другого формуючого блока, перший вхід якого підключений до виходу блока константи Ef ref . Спільними ознаками технічного рішення та пристрою є наявність датчика напруги статора, датчика струму статора, датчика струму ротора, блока визначення активної та реактивної складових струму статора, блока перетворення координат, блока визначення реактивної потужності, блока оцінки електрорушійної сили синхронного двигуна, блока розрахунку внутрішнього кута та його першої і другої похідних, блока формування напруги регулятора збудження, блока синхронної кутової частоти 0 . Недоліками даного винаходу є відсутність блоків, які забезпечують необхідну швидкість форсування чи гасіння поля синхронного двигуна в динамічних режимах та відповідний рівень напруги в статичних. В основу корисної моделі поставлено задачу форсування і гасіння поля ротора синхронного двигуна в динамічних режимах шляхом комутації конденсаторного накопичувача транзисторними ключами до обмотки збудження залежно від заданого та поточного струмів збудження, забезпечити підвищення швидкості регулювання струму збудження без використання додаткових резисторів. Поставлена задача вирішується тим, що у відомому технічному рішенні, що складається з синхронного двигуна з обмоткою збудження, блока обчислення активної та реактивної складових струму статора, перший вхід якого підключений до блока обчислення струму статора, вхід якого з'єднано з виходом датчика струму статора, другий вхід блока визначення активної та реактивної складових струму статора з'єднаний з виходом блока визначення кута , перший 2 UA 93704 U 5 10 15 20 25 30 35 40 45 50 вхід якого з'єднано з виходом датчика струму статора, а другий вхід з'єднано з датчиком напруги статора, перший вихід блока визначення активної та реактивної складових струму статора з'єднаний з третім входом блока перетворення координат, другий вихід блока визначення активної та реактивної складових струму статора з'єднаний з четвертим входом блока перетворення координат і з першим входом блока визначення реактивної потужності, другий вхід якого з'єднано з виходом блока обчислення напруги, вхід якого з'єднано з виходом датчика напруги, перший вхід блока перетворення координат з'єднаний з першим виходом блока розрахунку внутрішнього кута та його похідних, другий вхід блока перетворення координат з'єднаний з виходом блока обчислення напруги статора, перший вихід блока перетворення координат з'єднаний з третім входом блока оцінки електрорушійної сили і з четвертим входом блока формування напруги регулятора, другий вихід з'єднаний з четвертим входом блока оцінки електрорушійної сили і з п'ятим входом блока формування напруги регулятора збудження, перший вхід блока оцінки електрорушійної сили з'єднаний з виходом блока синхронної кутової частоти 0 , другий вхід блока оцінки електрорушійної сили з'єднаний з виходом датчика струму ротора, перший вихід блока оцінки електрорушійної сили з'єднаний з першим входом блока розрахунку внутрішнього кута та його похідних, другий вихід блока оцінки електрорушійної сили з'єднано з другим входом блока розрахунку внутрішнього кута та його похідних, перший вихід якого з'єднано з першим входом блока формування напруги регулятора збудження, другий вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з другим входом блока формування напруги регулятора збудження, третій вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з третім входом блока формування напруги регулятора збудження, шостий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока визначення реактивної потужності, сьомий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібної постійної часу затухання коливань ротора, восьмий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання сумарної постійної часу ротора і виконуючого механізму, дев'ятий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібного значення реактивної потужності, згідно з корисною моделлю, паралельно обмотці збудження через датчик струму ротора та буферний дросель, підключений транзисторний перетворювач, до виходу якого приєднано накопичувальний конденсатор, вихід блока формування напруги регулятора збудження з'єднано з другим входом блока керування транзисторним і тиристорним перетворювачем, перший вхід якого з'єднаний з виходом датчика струму ротора, перший вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом транзисторного перетворювача, другий вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом тиристорного перетворювача, який через понижуючий трансформатор з'єднаний з мережею. На кресленні наведена функціональна схема пристрою. Корисна модель пояснюється кресленням, де наведено блок-схему, на якій прийнято позначення: 1 - синхронний двигун, 2 - трансформатор, 3 - тиристорний перетворювач, 4 транзисторний перетворювач, 5 - накопичувальний конденсатор, 6 - буферний дросель, 7 датчик напруги статора, 8 - датчик струму статора, 9 - датчик струму ротора, 10 – блок обчислення напруги статора, 11 - блок обчислення струму статора, 12 - блок визначення кута , 13 - блок визначення активної та реактивної складових струму статора, 14 - блок перетворення координат, 15 - блок визначення реактивної потужності, 16 - блок оцінки електрорушійної сили, 17 - блок розрахунку внутрішнього кута та його похідних, 18 - блок формування напруги регулятора збудження, 19 - блок синхронної кутової частоти 0 , 20 - блок завдання потрібної постійної часу затухання коливань ротора, 21 - блок завдання сумарної постійної часу ротора і виконуючого механізму, 22 - блок завдання потрібного значення реактивної потужності, 23 - блок керування транзисторним і тиристорним перетворювачем. Пристрій працює наступним чином: За допомогою датчиків напруги 7 та струму статора 8 обчислюється поточне значення напруги, поточне значення струму та кута зсуву між напругою та струмом: Us Is 55 . (1) Ці сигнали надходять на входи блока 13, в якому розраховується активна та реактивна складові струму статора: I cos Ia ; (2) I sin Ir ; (3) 3 UA 93704 U де Ia - активна складова струму; Ir - реактивна складова струму. 5 Сигнали Ia , Ir з виходу блока розрахунку активної та реактивної складових струму статора 13 надходять на входи блока перетворення координат 14, до якого також надходить сигнал з блока визначення внутрішнього кута синхронного двигуна 17. На виході блока отримують значення проекцій струму статора на вісь d , q : Id Ir cos Ia sin ; (4) Iq Ir sin Ia cos ; (5) де: Id - проекція струму статора на вісь d , 10 Iq - проекція струму статора на вісь q . Сигнал реактивної складової струму статора Ir з виходу блока 13 та сигнал Ul з виходу блока датчика напруги статора подається на входи блока визначення реактивної потужності 15. На виході блока отримують сигнал: Q Ir Ul . (6) 15 Сигнали Id , Iq , з виходу блока перетворення координат 14 та сигнал If датчика струму ротора 9 і сигнал 0 з блока синхронної кутової частоти 19 подаються на входи блока оцінки електрорушійної сили 16. На виході блока отримують значення проекцій електрорушійної сили на осі координат d , q : 1 x aq E d x aq kq Iq x kq x kq ; (7) 20 x x E q x ad If kd Id ad If ad x x kd x kd kd ; (8) де x ad - реактивний опір статора по oci d x aq - реактивний опір статора по осі q x kd - реактивний опір демпферної обмотки по oci d x kq - реактивний опір демпферної обмотки по oci q 25 kd - потокозчеплення демпферної обмотки по oci d kq - потокозчеплення демпферної обмотки по осі q. Значення потокозчеплення демпферної обмотки по осям d, q визначається за формулами: kq x aq kq Iq dt (rkq ( 0 )) x kq x kq ; (9) x x kd kd If ad Iq ad x xkd xkd kd 30 Сигнали E d , E q з виходу блока оцінки електрорушійної сили 16 надходять на входи блока розрахунку внутрішнього кута та його похідних 17. На виході блока отримують сигнали: arctanh 35 dt (0 ) rkd . (10) де N D ; (11) d dt ; (12) d2 dt 2 ; (13) D (Ia ra Ir x q ) UI Eq Ia x d Ir ra Ed ; (14) N Ir x d Ia ra UI Ed Ia ra Ir x q Eq ; (15) 4 UA 93704 U Сигнали , , з виходу блока розрахунку внутрішнього кута та його похідних та блока перетворення координат Id , Iq і блока визначення реактивної потужності Q надходять на входи блока формування напруги регулятора збудження 18. На виході блока отримують сигнал: 2 x x x ad T Uf _ ref S1 C Id S 2 Iq (Iq C) 1 0 ad kd 2 Tf x f x kd x ad , (16) 5 де: S1 Q Qref ; (17) S2 10 15 d d2 Q Ti dt dt 2 ; (18) Сигнал з виходу блока формування напруги збудження 18 надходить до блока керування транзисторним і тиристорним перетворювачем 23. В стаціонарному режимі живлення обмотки синхронної машини 1 здійснюється від тиристорного перетворювача 3, який отримує живлення через узгоджувальний трансформатор 2 від мережі. Сформований сигнал кута відкривання тиристорів з блока керування транзисторним і тиристорним перетворювачем 23 надходить до тиристорного перетворювача 3. На виході перетворювача 3 формується напруга, середнє значення якої: Uf k cxE2m (1 cos ) ; (19) де: k cx - коефіцієнт схеми випрямляча, E2m - максимальне значення випрямленої напруги, - кут відкривання тиристорів, який формується блоком 23. При цьому під дією напруги випрямляча 3, активного опору обмотки збудження з урахуванням електрорушійної сили само- та взаємоіндукції Е, струм визначається: 20 if Uf E R ; (20) В динамічному режимі під час зміни електричних параметрів режиму статора синхронної машини (напруга статора), або механічних параметрів режиму (момент навантаження), відповідним чином змінюється електрорушійна сила взаємоіндукції ротора і струм збудження: if 25 Uf d f ( t ) dt R . (21) З блока керування транзисторним і тиристорним перетворювачем надходить сигнал блокування на вхід тиристорного перетворювача 3 та сигнал до блока транзисторного перетворювача 4, що дозволяє його роботу, забезпечуючи заданий режим: Uf Ucm , (22) 30 35 де Uc - напруга ємнісного накопичувача; m - комутуюча функція. Напруга конденсатора 5 вибирається з умови Uc 5Ufнно , де Ufнно - номінальна напруга збудження. Таким чином шляхом комутації конденсаторного накопичувача транзисторними ключами до обмотки збудження залежно від заданого та поточного струмів збудження, вирішується задача форсування і гасіння поля ротора синхронного двигуна в динамічних режимах, що забезпечує підвищення швидкості регулювання струму збудження без використання додаткових резисторів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Пристрій регулювання збудженняφ синхронного двигуна в умовах різкозмінного навантаження, що складається з синхронного двигуна з обмоткою збудження, блока обчислення активної та реактивної складових струму статора, перший вхід якого підключений до блока обчислення струму статора, вхід якого з'єднано з виходом датчика струму статора, другий вхід блока визначення активної та реактивної складових струму статора з'єднаний з виходом блока визначення кута φ, перший вхід якого з'єднано з виходом датчика струму статора, а другий вхід з'єднано з датчиком напруги статора, перший вихід блока визначення активної та реактивної складових струму статора з'єднаний з третім входом блока перетворення координат, другий вихід блока визначення активної та реактивної складових струму статора з'єднаний з четвертим входом блока перетворення координат і з першим входом блока визначення реактивної 5 UA 93704 U 5 10 15 20 25 30 потужності, другий вхід якого з'єднано з виходом блока обчислення напруги, вхід якого з'єднано з виходом датчика напруги, перший вхід блока перетворення координат з'єднаний з першим виходом блока розрахунку внутрішнього кута та його похідних, другий вхід блоку перетворення координат з'єднаний з виходом блока обчислення напруги статора, перший вихід блока перетворення координат з'єднаний з третім входом блока оцінки електрорушійної сили і з четвертим входом блока формування напруги регулятора, другий вихід з'єднаний з четвертим входом блока оцінки електрорушійної сили і з п’ятим входом блока формування напруги регулятора збудження, перший вхід блока оцінки електрорушійної сили з'єднаний з виходом блока синхронної кутової частоти 0 , другий вхід блока оцінки електрорушійної сили з'єднаний з виходом датчика струму ротора, перший вихід блока оцінки електрорушійної сили з'єднаний з першим входом блока розрахунку внутрішнього кута та його похідних, другий вихід блока оцінки електрорушійної сили з'єднано з другим входом блока розрахунку внутрішнього кута та його похідних, перший вихід якого з'єднано з першим входом блока формування напруги регулятора збудження, другий вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з другим входом блока формування напруги регулятора збудження, третій вихід блока розрахунку внутрішнього кута та його похідних з'єднаний з третім входом блока формування напруги регулятора збудження, шостий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока визначення реактивної потужності, сьомий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібної постійної часу затухання коливань ротора, восьмий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання сумарної постійної часу ротора і виконуючого механізму, дев'ятий вхід блока формування напруги регулятора збудження з'єднаний з виходом блока завдання потрібного значення реактивної потужності, який відрізняється тим, що паралельно обмотці збудження через датчик струму ротора та буферний дросель, підключений транзисторний перетворювач, до виходу якого приєднано накопичувальний конденсатор, вихід блока формування напруги регулятора збудження з'єднано з другим входом блока керування транзисторним і тиристорним перетворювачем, перший вхід якого з'єднаний з виходом датчика струму ротора, перший вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом транзисторного перетворювача, другий вихід блока керування транзисторним і тиристорним перетворювачем з'єднаний з керуючим входом тиристорного перетворювача, який через понижуючий трансформатор з'єднаний з мережею. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюBialobrezhskyi Oleksii Volodymyrovych
Автори російськоюБялобржеский Алексей Владимирович
МПК / Мітки
МПК: H02P 21/00
Мітки: пристрій, збудження, регулювання, умовах, двигуна, різкозмінного, навантаження, синхронного
Код посилання
<a href="https://ua.patents.su/8-93704-pristrijj-regulyuvannya-zbudzhennya-sinkhronnogo-dviguna-v-umovakh-rizkozminnogo-navantazhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій регулювання збудження синхронного двигуна в умовах різкозмінного навантаження</a>
Спосіб регулювання збудження синхронного двигуна в умовах різкозмінного навантаження
Номер патенту: 86310
Опубліковано: 25.12.2013
Автори: Слободенюк Дмитро Володимирович, Бялобржеський Олексій Володимирович, Синяговський Дмитро Валерійович, Качалка Вадим Юрійович
МПК: H02P 21/00
Мітки: синхронного, навантаження, регулювання, різкозмінного, збудження, спосіб, умовах, двигуна
Формула / Реферат:
Спосіб регулювання збудження синхронного двигуна в умовах різкозмінного навантаження, при якому вимірюють діюче значення напруги статора, діюче значення струму статора синхронного двигуна, діюче значення струму в обмотці збудження, вимірюють кутову швидкість обертання ротора, розраховують кут фазового зсуву між напругою і струмом, розраховують активну і реактивну складові струму статора, розраховують зображення струмів в системі координат...
Пристрій автоматичного регулювання збудження синхронного двигуна
Номер патенту: 74428
Опубліковано: 25.10.2012
Автори: Жбанов Євгеній Леонідович, Бялобржеський Олексій Володимирович, Давидов Олександр Юрійович, Карлик Євгеній Павлович
МПК: H02P 23/02, H02P 9/10
Мітки: пристрій, регулювання, двигуна, збудження, автоматичного, синхронного
Формула / Реферат:
Пристрій автоматичного регулювання збудження синхронного двигуна, який включає синхронний двигун, обмотку збудження, три датчика Холла напруги і три датчика Холла струму, аналого-цифровий перетворювач, блок уставки напруги, блок обчислення зображуваного вектора напруги, блок обчислення зображуваного вектора струму, блок пам'яті, блок виявлення відхилення напруги, блок виявлення зміни коефіцієнта потужності, блок виявлення зміни струму...
Пристрій регулювання збудження синхронного двигуна в динамічних режимах
Номер патенту: 92934
Опубліковано: 10.09.2014
Автори: Слободенюк Дмитро Володимирович, Качалка Вадим Юрійович, Бялобржеський Олексій Володимирович
МПК: H02P 21/00
Мітки: динамічних, режимах, синхронного, двигуна, збудження, пристрій, регулювання
Формула / Реферат:
Пристрій регулювання збудження синхронного двигуна в динамічних режимах, що містить синхронний двигун з обмоткою збудження, з'єднаною через датчик струму з мостовим однофазним транзисторним перетворювачем, вихід якого з'єднаний з накопичувальним конденсатором, який відрізняється тим, що введено буферний дросель, тиристорний перетворювач, вихід якого з'єднаний паралельно з обмоткою збудження, вхід з'єднано з вторинною обмоткою трансформатора,...
Пристрій регулювання активної і реактивної потужностей синхронного електродвигуна пресового дефібрера
Номер патенту: 30073
Опубліковано: 11.02.2008
Автори: Пакіж Степан Петрович, Чупило Ігор Володимирович, Корнієвич Георгій Семенович, Лонкевич Євген Сергійович, Винницький Володимир Миколайович, Телєтков Олександр Васильович
Мітки: пресового, дефібрера, активної, пристрій, регулювання, синхронного, електродвигуна, потужностей, реактивної
Формула / Реферат:
Пристрій регулювання активної і реактивної потужностей синхронного електродвигуна пресового дефібрера, який складається з механічно з’єднаних електродвигуна насоса і насоса, який гідравлічно з’єднаний з гідроциліндрами, які механічно з’єднані з пресовими камерами, розташованими над дефібрерним каменем, який механічно з’єднаний з синхронним електродвигуном дефібрера, до електричного входу якого під’єднаний давач активної потужності, та...
Спосіб форсування струму збудження синхронного двигуна та пристрій для його реалізації
Номер патенту: 60652
Опубліковано: 15.10.2003
Автори: Нізімов Родіон Вікторович, Сторожко Вадим Станіславович, Нізімов Віктор Борисович
Мітки: струму, синхронного, реалізації, збудження, спосіб, пристрій, двигуна, форсування
Формула / Реферат:
1. Спосіб форсування струму збудження синхронного двигуна, при якому регулюють струм обмотки збудження пропорційно обмірюваної електромагнітної потужності двигуна, контролюють струм і напругу статора і при перевищенні струмом наперед заданого значення або при короткочасному глибокому зниженні напруги в електромережі нижче допустимого рівня, знімають керуючі імпульси з мостового випрямляча, включають попередньо заряджений від незалежного...
Попередній патент: Спосіб діагностики герпесвірусних пошкоджень слизової оболонки травного тракту
Наступний патент: Спосіб витягування циліндричних деталей в профільованій матриці
Випадковий патент: Спосіб виготовлення профільованих і плоских покрівельних листів