Пристрій визначення інтегральної нелінійності характеристики перетворення аналого-цифрових перетворювачів
Номер патенту: 97465
Опубліковано: 27.02.2012
Автори: Кочан Роман Володимирович, Кочан Орест Володимирович
Формула / Реферат
Пристрій визначення інтегральної нелінійності характеристики перетворення аналого-цифрових перетворювачів, який включає джерело взірцевої напруги, однакові резистори і комутатор, входи якого підключені до виводів резисторів, а вихід - до входу аналого-цифрового перетворювача, який відрізняється тим, що в схему додатково введено чотири перемикачі, входи керування яких з'єднані між собою, вихід першого перемикача з'єднано з першим виводом першого резистора, другий вивід якого з'єднано з першим виводом другого резистора, вихід другого перемикача з'єднано з другим виводом другого резистора, вихід третього перемикача з'єднано з першим виводом третього резистора, другий вивід якого з'єднано з першим виводом четвертого резистора, вихід четвертого перемикача з'єднано з другим виводом четвертого резистора, причому перший вхід першого перемикача і другий вхід другого перемикача з'єднані з першим виходом джерела взірцевої напруги, перший вхід четвертого перемикача і другий вхід третього перемикача з'єднані з другим виходом джерела взірцевої напруги, крім того, між собою з'єднані перші входи другого і третього перемикачів, а також другі входи першого і четвертого перемикачів.
Текст
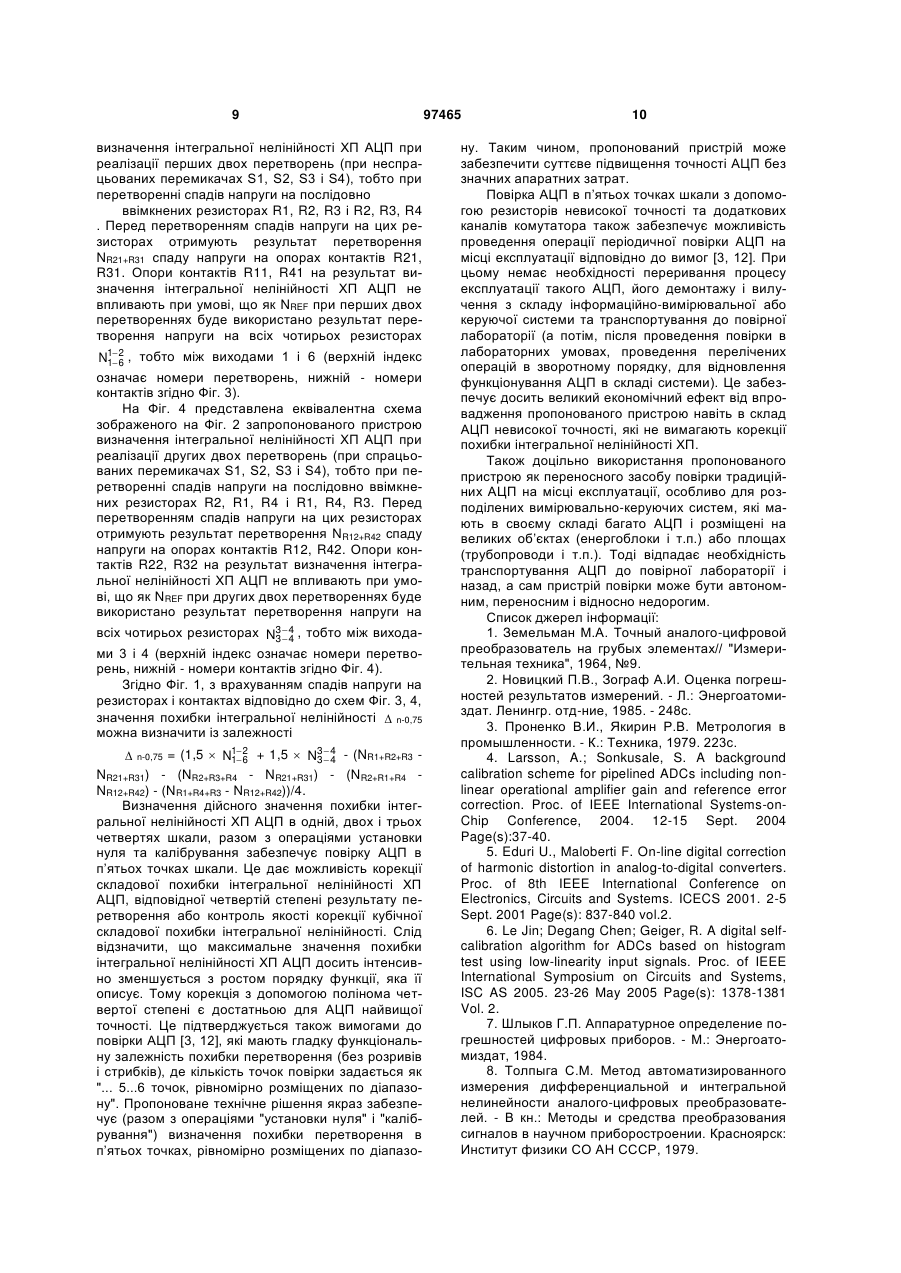
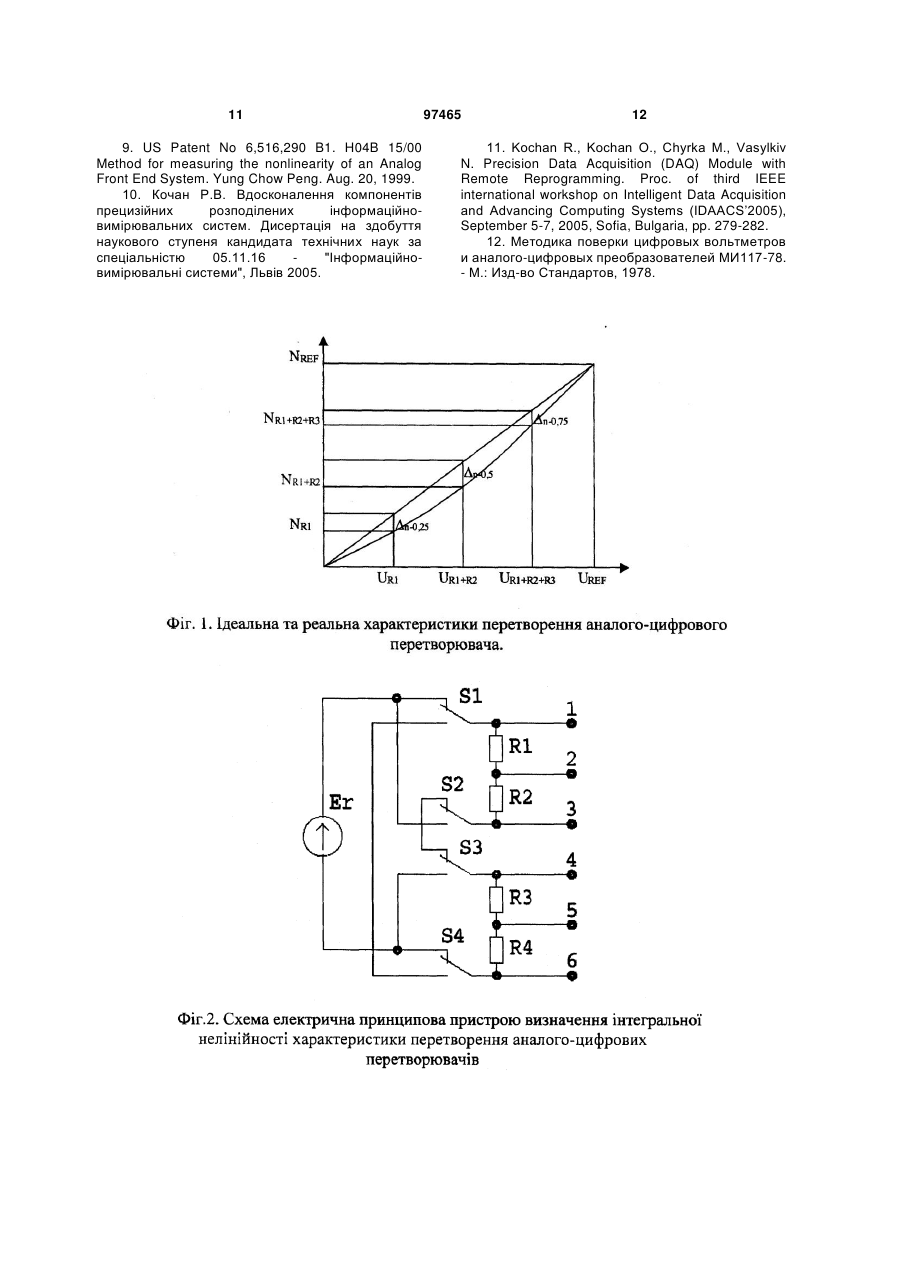
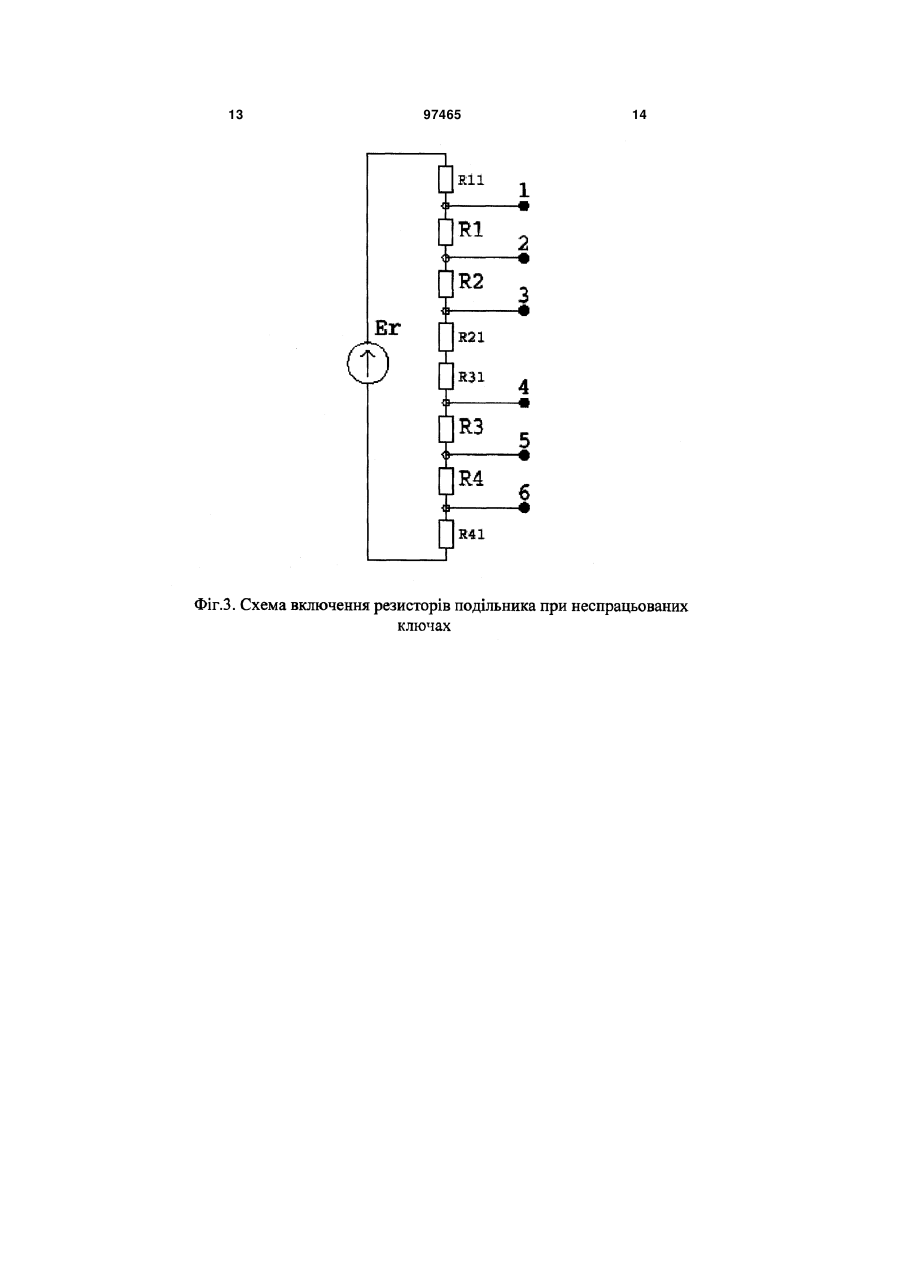
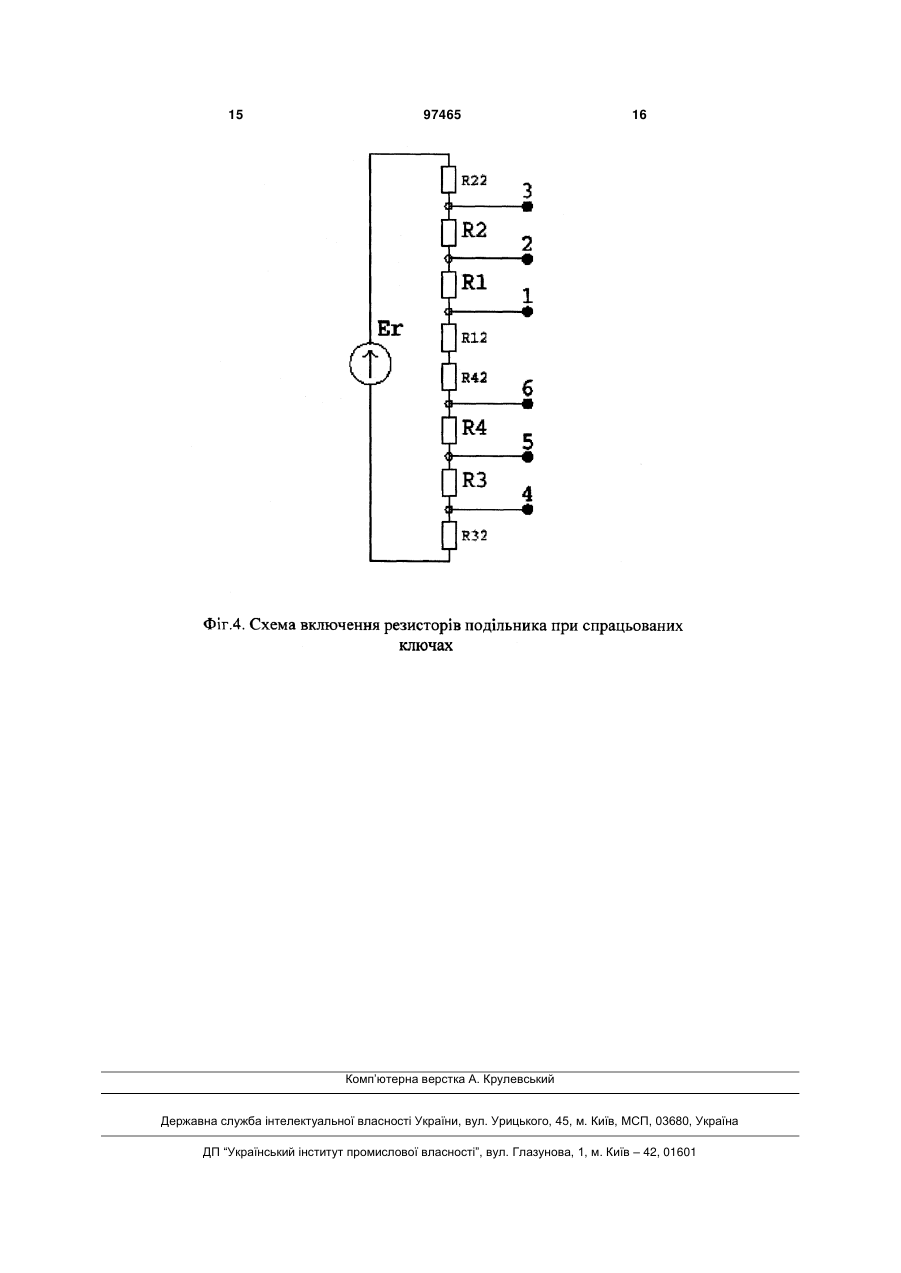
Пристрій визначення інтегральної нелінійності C2 2 (19) 1 3 де: N - поточний результат перетворення АЦП, тобто його реальний вихідний код; х - абсолютна похибка перетворення. Виходячи з (1) можна проводити корекцію похибки АЦП, якщо відома похибка х k i N = N - хN (2) k де N - скореговане значення результату перетворення. Скореговане значення результату перетвоk рення N наближається до вихідного коду ідеальi ного АЦП N , однак не дорівнює йому через те, що точне значення похибки перетворення х, повністю адекватне результату перетворення N, нам не відоме. Похибка ХП АЦП х включає адитивну а, мультиплікативну m та нелінійну n складові (3) х = а+ m+ n Відомий спосіб усунення адитивної складової похибки АЦП (так звана операція "установки нуля") [1, 2], який полягає у подачі на вхід АЦП нульової вхідної аналогової величини (закорочення входу) та отримання результату перетворення N0, який відповідає адитивній похибці АЦП a. Тоді, згідно (2), скореговане значення результату перетворення визначається як k N = N - a = N - N0 (4) Відомий спосіб усунення мультиплікативної складової похибки АЦП (так звана операція "калібрування") [1, 2], який полягає у подачі на вхід АЦП взірцевої вхідної аналогової величини (зокрема, напруги UREF) та отримання результату перетворення NREF, за допомогою якого можна визначити мультиплікативну похибку АЦП m. Скореговане значення результату перетворення, де враховані як адитивна а так і мультиплікативна m складові похибки ХП АЦП, визначається як N N0 k N = UREF (5) NREF N0 Після корекції адитивної та мультиплікативної складових похибок АЦП домінуючою стає похибка, зумовлена нелінійністю його ХП - n. Значення нелінійної складової похибки АЦП (як і всіх інших складових) можна визначити під час його повірки [3]. Але така повірка для переважної більшості АЦП виконується один раз на рік, тому отримане значення нелінійності може бути використане для корекції похибки лінійності в дуже обмеженому числі випадків - тільки при умові високої стабільності ХП АЦП. Тому для корекції похибки нелінійності використовують способи повірки на місці експлуатації. В загальному всі способи повірки зводяться до двох загальних варіантів [3]: порівняння результатів перетворення АЦП з результатами перетворення взірцевого засобу вимірювання (приблизно відома вхідна величина одночасно або за малий проміжок часу подається на взірцевий засіб вимірювання і на АЦП, який повіряють). Звичайно це зводиться до періодичного вимірювання вхідного сигналу з допомогою АЦП за відомо вищої точності, ніж той, який повіряють; використання взірцевого сигналу (точно відома взірцева фізична величина подається на АЦП, який повіряють) і порівняння результатів перетво 97465 4 рення АЦП із відомим значенням вхідної величини. Звичайно це зводиться до використання цифро-аналогового перетворювача (ЦАП), завідомо вищої точності, ніж АЦП, який повіряють. Всі модифікації цих способів щодо повірки на місці експлуатації пов’язані з можливістю їх адаптації до умов експлуатації та економічною доцільністю. Відомий спосіб визначення похибки від інтегральної нелінійності ХП АЦП n , який базується на включенні паралельно до тестованого взірцевого АЦП [4]. При цьому взірцевий АЦП може мати суттєво нижчу швидкодію, бо він служить тільки для корекції основного похибки АЦП. Недоліком способу є необхідність використання дорогих прецизійних АЦП і доцільність використання тільки в лабораторних умовах під час періодичної повірки в зв’язку з необхідністю створення для такого АЦП відповідних умов експлуатації. Крім того, такий шлях просто непридатний для прецизійних систем, для яких відповідно точніші АЦП не існують. Різновидом цього способу є використання двох паралельно ввімкнених АЦП (один з них через керований подільник напруги), де для корекції нелінійності перетворення одного АЦП використовують інший, строго аналогічний (виконаний в одному з першим технологічному циклі) АЦП [5]. При цьому корекція відбувається за рахунок роботи АЦП на різних ділянках діапазону перетворення (під впливом керованого подільника напруги), де нелінійність обох АЦП має протилежний характер. Однак можливості цього способу обмежені неідентичністю двох АЦП, яку важко оцінити і гарантувати. Тому для прецизійних систем такий спосіб мало придатний. Відомий спосіб визначення похибки від інтегральної нелінійності ХП АЦП n, який базується на подачі на його вхід тестових сигналів, отриманих з допомогою взірцевого ЦАП [6]. Для зниження вимог до ЦАП пропонується побудова гістограми, за якою визначають диференційну ("місцеву") нелінійність АЦП, а потім, на її базі, переходять до визначення інтегральної нелінійності. Але цей шлях придатний тільки для АЦП невисокої точності та чутливості, в зв’язку з тим, що на результат визначення диференційної нелінійності великий вплив мають шуми АЦП і залишкові похибки від дії завад (викликані обмеженим коефіцієнтом подавлення завад). А при обчисленні інтегральної нелінійності похибки визначення диференціальної нелінійності сумуються. Тому отримані значення похибки інтегральної нелінійності мають велику залишкову похибку і годяться скоріше для нормування похибки АЦП (визначення основної метрологічної характеристики АЦП - межі основної допустимої похибки після установки нуля та калібрування), а не для корекції залишкової похибки нелінійності. Аналогічне рішення було запропоноване в [7], де диференційна нелінійність визначається як спотворення окремих квантів АЦП. На базі вивчення цього спотворення в різних точках діапазону перетворення судять про інтегральну нелінійність АЦП. Однак при цьому також визначається (оцінюється) максимальне значення похибки нелі 5 нійності - робиться висновок, що інтегральна похибка нелінійності не перевищує деякого значення, а такий результат не придатний для корекції цієї похибки (для корекції необхідно знати конкретне значення похибки інтегральної нелінійності). Модифікаціями способу, що використовує ЦАП, є теж використання різних непрямих методів оцінки нелінійності. В [8] запропоновано для оцінки диференційної нелінійності використати густину імовірності випадкового значення цієї похибки для множини всіх точок діапазону перетворення. При цьому вхідна величина АЦП теж визначається як випадкова величина з своїм законом розподілу. Запропонований математичний апарат дозволяє оцінити в цьому випадку характеристики похибки, викликані інтегральною нелінійністю, однак не дозволяє провести корекцію похибки. Для такої ж оцінки служить спосіб [9], де характеристики похибки інтегральної нелінійності визначаються шляхом оцінки нелінійних спотворень, які виникають при перетворенні в код нелінійним АЦП взірцевого синусоїдального сигналу. Тоді для оцінки похибки можна використати відомий математичний апарат перетворення Фур’є. Таке технічне рішення, незважаючи на дуже велику обчислювальну складність, є перспективним для оцінки похибок високочастотних АЦП відносно малої розрядності (8...10 розрядів). Однак для прецизійних АЦП (16...24 розряди) воно вимагає використання ЦАП відповідної якості для формування взірцевого синусоїдального сигналу, тому є неприйнятним. Крім того, воно не придатне для корекції похибки інтегральної нелінійності. Спрощеним варіантом способу, який використовує ЦАП [3], може бути створення тестових сигналів з допомогою резисторного подільника напруги, під’єднаного до джерела взірцевої напруги UREF. Таке рішення значно дешевше, однак похибка визначення інтегральної нелінійності ХП АЦП n буде визначатися похибками резисторів подільника. Прототипом пропонованого пристрою є пристрій [10, 11], який базується на взаємному протиставленні резисторів подільника напруги, під’єднаного до джерела взірцевої напруги UREF. Це забезпечує визначення інтегральної нелінійності ХП АЦП з похибкою, значно меншою від похибки самих резисторів. Наприклад, для подільника з двох однакових резисторів R1 і R2, під’єднаних до джерела взірцевої напруги UREF, завжди (згідно другого закону Кірхгофа) справджується рівність UREF = UR1 + UR2. Згідно закону Ома, з врахуванням відносних відхилень 1 і 2 дійсного опору резисторів R1 і R2 від середнього значення R можна записати UREF = I R (1 + 1 ) + I R (1 + 2 ) = I R (2 + 1 + 2 ). (6) Середнє значення R опору резисторів R1 і R2 можна представити як R = (R1 + R2)/2 = (R(1 + 1 ) + R(1 + 2 ))/2. (7) Розкривши дужки і звівши подібні, отримаємо 1 = 2 . (8) Підставивши (8) в (6) можна побачити, що се 97465 6 реднє значення спаду напруги на резисторах R1 і R2 відповідає половині напруги взірцевого джерела UREF не зважаючи на наявність відхилень 1 і 2 .Таким чином, з допомогою двох резисторів однакового номіналу, можна з високою точністю визначити похибку інтегральної нелінійності n-0,5 в середині шкали (попередньо провівши корекцію адитивної а та мультиплікативної m похибок. Значення похибки інтегральної нелінійності n-0,5 можна визначити, виходячи з Фіг. 1, де представлені ідеальна (лінійна) ХП АЦП і реальна ХП, яка має нелінійність квадратичного характеру. В зв’язку з тим, що реальнаХП АЦП представлена після корекції адитивної а та мультиплікативної m похибок, вона проходить через початок координат і через точку калібрування UREF. Таким чином, згідно Фіг. 1, з врахуванням (1), можна записати NR1 + n-0,5-1 + NR2 + n-0,5-2 = NREF. (9) де n-0,5-1, n-0,5-2 - значення інтегральної нелінійності, відповідні до спадів напруги на R1 і R2. Оскільки R1 і R2 однакового номіналу, то можна припустити, що UR1 UR2 NR1 NR2 n-0,5-1 n-0,5-2 n-0,5. Підставивши останню приблизну рівність в (9), отримаємо значення похибки інтегральної нелінійності n-0,5 = (NREF - NR1 - NR2)/2, яке можна використати для корекції квадратичної похибки ХП АЦП. В [10] показано, що для поточного значення довільного результату перетворення N значення похибки інтегральної нелінійності n(N) буде становити N (N NREF ) . n(N) n-0,5 2 4 NREF Це значення може бути використане для корекції похибки інтегральної нелінійності ХП АЦП. Приблизний характер рівності n-0,5-1 n-0,5 n-0,5 викликаний не відхиленнями дійсних 2 значень резисторів R1 і R2 , а невідповідністю отриманого значення похибки n-0,5 дійсній середині шкали, тобто методичною похибкою. В [10] показано, що ця методична похибка не перевищує N2 R1 2 n0,5 R , 2 NR1 тобто є пропорційною квадрату похибки резисторів R1 і R2. Наприклад, при нелінійності ХП АЦП 0,1% і використанні резисторів R1 і R2 з допустимим відхиленням 1% (тобто R = 0,01), отримаємо MET n0,5 МЕТ 0,00001%, чим можна нехтувати. Фактично похибка корекції інтегральної нелінійності ХП АЦП в цьому випадку буде визначатися нелінійністю вищого порядку (тобто, відповідною до третьої та вищих степенів результату перетворення N), а також похибками від квантування і впливу шумів АЦП. Аналогічним чином, під’єднавши до джерела взірцевої напруги UREF не два, а чотири резистори (R1, R2, R3 і R4), і усереднюючи результати перетворення спадів напруги на них, можна отримати 7 значення похибки інтегральної нелінійності в одній четвертій частині діапазону перетворення n-0,25. Згідно Фіг. 1 значення похибки інтегральної не лінійності n-0,25 можна визначити із залежності n-0,25 = (NREF - NR1 - NR2 - NR3 - NR4)/4. Тоді стає можливою корекція кубічної складової похибки інтегральної нелінійності ХП АЦП. Але для визначення похибки інтегральної нелінійності в трьох четвертих діапазону перетворення n-0,75 (див. Фіг. 1) така схема не придатна. Це пов’язано з тим, що для отримання результату перетворення, який відповідає трьом четвертим діапазону, необхідно подати на вхід АЦП спад напруги на трьох резисторах. Однак тоді не вдається записати рівняння, аналогічні (6)...(8). Метою винаходу є підвищення точності корекції похибки АЦП за рахунок підвищення точності визначення похибки інтегральної нелінійності в трьох четвертих діапазону перетворення. Поставлена мета досягається тим, що в схему пристрою визначення інтегральної нелінійності ХП АЦП, який включає джерело взірцевої напруги, чотири однакові резистори і комутатор, входи якого підключені до виводів резисторів, а вихід - до входу АЦП, введено чотири перемикачі, входи керування яких з’єднані між собою. Вихід першого перемикача з’єднано з першим виводом першого резистора, другий вивід якого з’єднано з першим виводом другого резистора. Вихід другого перемикача з’єднано з другим виводом другого резистора. Вихід третього перемикача з’єднано з першим виводом третього резистора, другий вивід якого з’єднано з першим виводом четвертого резистора. Вихід четвертого перемикача з’єднано з другим виводом четвертого резистора. При цьому перший вхід першого перемикача і другий вхід другого перемикача з’єднані з першим виходом джерела взірцевої напруги, а перший вхід четвертого перемикача і другий вхід третього перемикача з’єднані з другим виходом джерела взірцевої напруги. Крім того, між собою з’єднані перші входи другого і третього перемикачів, а також другі входи першого і четвертого перемикачів. Під час визначення похибки інтегральної нелінійності в трьох четвертих діапазону n-0,75 проводять чотири перетворення: 1. Всі перемикачі в початковому положенні, на вхід АЦП поступає сумарний спад напруги на резисторах R1, R2, R3; 2. Всі перемикачі в початковому положенні, на вхід АЦП поступає сумарний спад напруги на резисторах R2, R3, R4; 3. Всі перемикачі в перемкнутому положенні, на вхід АЦП поступає сумарний спад напруги на резисторах R2, R1, R4; 4. Всі перемикачі в перемкнутому положенні, на вхід АЦП поступає сумарний спад напруги на резисторах R1, R4, R3. Таким чином, АЦП перетворює в код всі комбінації спадів напруги на трьох з чотирьох резисторів, що дає змогу записати рівняння, аналогічні (6)...(8) і визначити похибку інтегральної нелінійності в трьох четвертих діапазону n-0,75 з точністю, значно вищою від точності використаних резисторів R1, R2, R3, R4. 97465 8 Схема електрична принципова запропонованого пристрою представлена на Фіг. 2. Вона включає джерело взірцевої напруги UREF, чотири резистори R1, R2, R3 і R4 з однаковим номінальним опором і чотири перемикачі S1, S2, S3 і S4. Керуючі входи всіх перемикачів (на Фіг. 2 не показані) з’єднані між собою, тому всі перемикачі змінюють положення одночасно. Спад напруги на R1, R2, R3 і R4 можна, аналогічно до (6), записати як UREF =UR1 + UR2 + UR3 + UR4 = I R (4 + 1 + 2 + 3 + 4 ), (10) де 1 , 2 , 3 , 4 - відповідні відхилення опору резисторів R1, R2, R3 і R4 від середнього значення R. Аналогічно до (7) і (8) можна показати, що 1 + 2 + 3 + 4 = 0 (11) Середнє значення всіх чотирьох результатів перетворення буде становити (UR1 + UR2 + UR3 + UR2 + UR3 + UR4 + UR2 + UR1 + UR4 + UR1 + UR4 + UR3)/4 = (I R (12 + 3 1 + 3 2 + 3 3 + 3 4 ))/4 = (I R 3 (4 + 1 + 2 + 3 + 4 ),)/4. (12) Підставивши (10) в (12), отримаємо (3 UREF)/4 = (I R 3 (4 + 1 + 2 + 3 + 4 ))/4, (13) а підставивши (11) в (13) і скоротивши, отримаємо UREF = I R 4, що підтверджує незалежність середнього значення результатів чотирьох перетворень від похибок резисторів R1, R2, R3 і R4. Виходячи з Фіг. 1, значення похибки інтегральної нелінійності можна визначити як n-0,75 = (3 NREF - NR1+R2+R3 - NR2+R3+R4 NR2+R1+R4 - NR1+R4+R3)/4. (14) Де NR1+R2+R3, NR2+R3+R4, NR2+R1+R4, NR1+R4+R3 - результати перетворення спаду напруги на вказаних як індекси резисторах. Слід відзначити, що рівності (10)...(14) записані для умов, коли опором контактів перемикачів S1, S2, S3 і S4 можна знехтувати (він дуже малий порівняно з опором резисторів R1, R2, R3 і R4. Однак, для прецизійних АЦП, наприклад, 24-х розрядних, навіть при номінальному опорі резисторів 100 кОм, опір контактів перемикачів S1, S2, S3 і S4 0,1 Ома (типове значення контактного опору електромагнітних реле) викликає похибку на рівні 20-го розряду. Збільшення ж номінального опору резисторів R1, R2, R3 і R4 не завжди допустиме через конечне значення вхідного опору АЦП, який шунтує (зменшує) опір того резистора, на якому в даний момент вимірюється напруга. Тому, для прецизійних АЦП, необхідна корекція похибки, викликана впливом опору контактів перемикачів S1, S2, S3 і S4. Таку корекцію можна реалізувати шляхом вимірювання спадів напруги на контактах тих перемикачів, опір яких виявився ввімкненим в коло відповідного резистора. На Фіг. 3 представлена еквівалентна схема зображеного на Фіг. 2 запропонованого пристрою 9 визначення інтегральної нелінійності ХП АЦП при реалізації перших двох перетворень (при неспрацьованих перемикачах S1, S2, S3 і S4), тобто при перетворенні спадів напруги на послідовно ввімкнених резисторах R1, R2, R3 і R2, R3, R4 . Перед перетворенням спадів напруги на цих резисторах отримують результат перетворення NR21+R31 спаду напруги на опорах контактів R21, R31. Опори контактів R11, R41 на результат визначення інтегральної нелінійності ХП АЦП не впливають при умові, що як NREF при перших двох перетвореннях буде використано результат перетворення напруги на всіх чотирьох резисторах N1 2 , тобто між виходами 1 і 6 (верхній індекс 1 6 означає номери перетворень, нижній - номери контактів згідно Фіг. 3). На Фіг. 4 представлена еквівалентна схема зображеного на Фіг. 2 запропонованого пристрою визначення інтегральної нелінійності ХП АЦП при реалізації других двох перетворень (при спрацьованих перемикачах S1, S2, S3 і S4), тобто при перетворенні спадів напруги на послідовно ввімкнених резисторах R2, R1, R4 і R1, R4, R3. Перед перетворенням спадів напруги на цих резисторах отримують результат перетворення NR12+R42 спаду напруги на опорах контактів R12, R42. Опори контактів R22, R32 на результат визначення інтегральної нелінійності ХП АЦП не впливають при умові, що як NREF при других двох перетвореннях буде використано результат перетворення напруги на всіх чотирьох резисторах N3 4 , тобто між вихода34 ми 3 і 4 (верхній індекс означає номери перетворень, нижній - номери контактів згідно Фіг. 4). Згідно Фіг. 1, з врахуванням спадів напруги на резисторах і контактах відповідно до схем Фіг. 3, 4, значення похибки інтегральної нелінійності n-0,75 можна визначити із залежності = (1,5 N1 2 + 1,5 N3 4 - (NR1+R2+R3 1 6 34 NR21+R31) - (NR2+R3+R4 - NR21+R31) - (NR2+R1+R4 NR12+R42) - (NR1+R4+R3 - NR12+R42))/4. Визначення дійсного значення похибки інтегральної нелінійності ХП АЦП в одній, двох і трьох четвертях шкали, разом з операціями установки нуля та калібрування забезпечує повірку АЦП в п’ятьох точках шкали. Це дає можливість корекції складової похибки інтегральної нелінійності ХП АЦП, відповідної четвертій степені результату перетворення або контроль якості корекції кубічної складової похибки інтегральної нелінійності. Слід відзначити, що максимальне значення похибки інтегральної нелінійності ХП АЦП досить інтенсивно зменшується з ростом порядку функції, яка її описує. Тому корекція з допомогою полінома четвертої степені є достатньою для АЦП найвищої точності. Це підтверджується також вимогами до повірки АЦП [3, 12], які мають гладку функціональну залежність похибки перетворення (без розривів і стрибків), де кількість точок повірки задається як "... 5...6 точок, рівномірно розміщених по діапазону". Пропоноване технічне рішення якраз забезпечує (разом з операціями "установки нуля" і "калібрування") визначення похибки перетворення в п’ятьох точках, рівномірно розміщених по діапазо n-0,75 97465 10 ну. Таким чином, пропонований пристрій може забезпечити суттєве підвищення точності АЦП без значних апаратних затрат. Повірка АЦП в п’ятьох точках шкали з допомогою резисторів невисокої точності та додаткових каналів комутатора також забезпечує можливість проведення операції періодичної повірки АЦП на місці експлуатації відповідно до вимог [3, 12]. При цьому немає необхідності переривання процесу експлуатації такого АЦП, його демонтажу і вилучення з складу інформаційно-вимірювальної або керуючої системи та транспортування до повірної лабораторії (а потім, після проведення повірки в лабораторних умовах, проведення перелічених операцій в зворотному порядку, для відновлення функціонування АЦП в складі системи). Це забезпечує досить великий економічний ефект від впровадження пропонованого пристрою навіть в склад АЦП невисокої точності, які не вимагають корекції похибки інтегральної нелінійності ХП. Також доцільно використання пропонованого пристрою як переносного засобу повірки традиційних АЦП на місці експлуатації, особливо для розподілених вимірювально-керуючих систем, які мають в своєму складі багато АЦП і розміщені на великих об’єктах (енергоблоки і т.п.) або площах (трубопроводи і т.п.). Тоді відпадає необхідність транспортування АЦП до повірної лабораторії і назад, а сам пристрій повірки може бути автономним, переносним і відносно недорогим. Список джерел інформації: 1. Земельман М.А. Точный аналого-цифровой преобразователь на грубых элементах// "Измерительная техника", 1964, №9. 2. Новицкий П.В., Зограф А.И. Оценка погрешностей результатов измерений. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1985. - 248с. 3. Проненко В.И., Якирин Р.В. Метрология в промышленности. - К.: Техника, 1979. 223с. 4. Larsson, A.; Sonkusale, S. A background calibration scheme for pipelined ADCs including nonlinear operational amplifier gain and reference error correction. Proc. of IEEE International Systems-onChip Conference, 2004. 12-15 Sept. 2004 Page(s):37-40. 5. Eduri U., Maloberti F. On-line digital correction of harmonic distortion in analog-to-digital converters. Proc. of 8th IEEE International Conference on Electronics, Circuits and Systems. ICECS 2001. 2-5 Sept. 2001 Page(s): 837-840 vol.2. 6. Le Jin; Degang Chen; Geiger, R. A digital selfcalibration algorithm for ADCs based on histogram test using low-linearity input signals. Proc. оf IEEE International Symposium on Circuits and Systems, ISC AS 2005. 23-26 May 2005 Page(s): 1378-1381 Vol. 2. 7. Шлыков Г.П. Аппаратурное определение погрешностей цифровых приборов. - М.: Энергоатомиздат, 1984. 8. Толпыга С.М. Метод автоматизированного измерения дифференциальной и интегральной нелинейности аналого-цифровых преобразователей. - В кн.: Методы и средства преобразования сигналов в научном приборостроении. Красноярск: Институт физики СО АН СССР, 1979. 11 9. US Patent No 6,516,290 B1. H04B 15/00 Method for measuring the nonlinearity of an Analog Front End System. Yung Chow Peng. Aug. 20, 1999. 10. Кочан Р.В. Вдосконалення компонентів прецизійних розподілених інформаційновимірювальних систем. Дисертація на здобуття наукового ступеня кандидата технічних наук за спеціальністю 05.11.16 "Інформаційновимірювальні системи", Львів 2005. 97465 12 11. Kochan R., Kochan О., Chyrka M., Vasylkiv N. Precision Data Acquisition (DAQ) Module with Remote Reprogramming. Proc. of third IEEE international workshop on Intelligent Data Acquisition and Advancing Computing Systems (IDAACS’2005), September 5-7, 2005, Sofia, Bulgaria, pp. 279-282. 12. Методика поверки цифровых вольтметров и аналого-цифровых преобразователей МИ117-78. - М.: Изд-во Стандартов, 1978. 13 97465 14 15 97465 16 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determination of conversion characteristic integral nonlinearity of analog-to-digital converters
Автори англійськоюKochan Roman Volodymyrovych, Kochan Orest Volodymyrovuch
Назва патенту російськоюУстройство определения интегральной нелинейности характеристики преобразования аналого-цифровых преобразователей
Автори російськоюКочан Роман Владимирович, Кочан Орест Владимирович
МПК / Мітки
МПК: H03M 1/10
Мітки: пристрій, інтегральної, нелінійності, перетворення, визначення, характеристики, аналого-цифрових, перетворювачів
Код посилання
<a href="https://ua.patents.su/8-97465-pristrijj-viznachennya-integralno-nelinijjnosti-kharakteristiki-peretvorennya-analogo-cifrovikh-peretvoryuvachiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій визначення інтегральної нелінійності характеристики перетворення аналого-цифрових перетворювачів</a>
Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ
Номер патенту: 79016
Опубліковано: 10.05.2007
Автори: Гордєєв Борис Миколайович, Жуков Юрій Даниїлович
МПК: G01F 23/284, G01F 23/28
Мітки: сипких, характеристики, рідких, параметрів, середовищ, спосіб, перетворення, визначення, пристрою
Формула / Реферат:
1. Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ за затримкою відбитого сигналу відносно посланого у контрольоване середовище зондувального імпульсного сигналу, який полягає у тому, що виконують серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання, який відрізняється тим, що серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання виконують...
Пристрій для реєстрації нелінійності фазочастотної характеристики чотириполюсників
Номер патенту: 60080
Опубліковано: 15.09.2003
Автори: Скрипник Юрій Олексійович, Мегедь Сергій Олександрович
МПК: G01R 27/28
Мітки: характеристики, реєстрації, нелінійності, пристрій, фазочастотної, чотириполюсників
Формула / Реферат:
Пристрій для реєстрації нелінійності фазочастотної характеристики чотириполюсників, що містить високочастотний генератор з блоком перестроювання частоти, низькочастотний генератор фіксованої частоти, автоматичний перемикач, виходом підключений до вхідної клеми для підключення чотириполюсника, що досліджується, та до першого входу другого автоматичного перемикача, перший вхід першого автоматичного перемикача з'єднаний з виходом...
Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ
Номер патенту: 11026
Опубліковано: 15.12.2005
Автори: Жуков Юрій Даниїлович, Гордєєв Борис Миколайович
МПК: G01F 23/28, G01F 23/284
Мітки: спосіб, визначення, пристрою, характеристики, параметрів, сипких, рідких, перетворення, середовищ
Формула / Реферат:
1. Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ за затримкою відбитого сигналу відносно посланого у контрольоване середовище зондувального імпульсного сигналу, який полягає у тому, що виконують серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання, який відрізняється тим, що виконують серію зсувів зондувального імпульсного сигналу вздовж діапазону вимірювання...
Пристрій для визначення нелінійності електрофізичних характеристик матеріалів
Номер патенту: 31812
Опубліковано: 25.04.2008
Автори: Скрипник Юрій Олексійович, Ваганов Олексій Анатолійович
МПК: G01N 22/00
Мітки: характеристик, пристрій, визначення, матеріалів, електрофізичних, нелінійності
Формула / Реферат:
1. Пристрій для визначення нелінійності електрофізичних характеристик матеріалів, що містить НВЧ-генератор, НВЧ-гетеродин, передавальну і приймальну антени, послідовно з'єднані НВЧ-підсилювач, балансний змішувач, вхід якого підключений до виходу НВЧ-гетеродина, і підсилювач проміжної частоти, комутаційний генератор, перший фільтр нижніх частот, та послідовно з'єднані синхронний детектор, другий фільтр нижніх частот і вольтметр, який...
Пристрій аналого-цифрового перетворення
Номер патенту: 55701
Опубліковано: 27.12.2010
Автори: Захарченко Сергій Михайлович, Крупельницький Леонід Віталійович, Бойко Олександр Володимирович
МПК: H03G 3/20
Мітки: аналого-цифрового, пристрій, перетворення
Формула / Реферат:
Пристрій аналого-цифрового перетворення, який містить вхідну аналогову шину, шину опорної напруги, аналоговий комутатор, блок вибірки-зберігання, схему множення на основу системи числення, схему порівняння, суматор, схему множення, блок керування, вихідну цифрову шину, шину "Пуск", шину "Кінець перетворення", причому вхідну аналогову шину з'єднано з першим інформаційним входом аналогового комутатора, вихід якого з'єднано...
Попередній патент: Термоелектричний перетворювач
Наступний патент: Транспортувальні сполуки – похідні купредоксину і способи їх застосування
Випадковий патент: Зв'язуючий матеріал "кб-1"