Приводна система коксової машини

Формула / Реферат
(57) 1. Приводная система коксовой машины, содержащая механизм передвижения с электромеханическими приводами ходовых колес, дополнительные короткоходовые приводы точной установки и устройство управления приводами, взаимодействующее с устройством определения положения машины относительно обслуживаемого объекта, отличающаяся тем, что каждый дополнительный короткоходовый привод точной установки выполнен в виде силового гидроцилиндра со штоком, снабженного рельсовым захватом, при этом рельсовый захват шарнирно соединен со штоком гидроцилиндра.
2. Приводная система коксовой машины по п. 1, отличающаяся тем, что рельсовый захват выполнен с самозатягивающимися эксцентриками двухстороннего действия.
3. Приводная система коксовой машины по пп. 1 и 2, отличающаяся тем, что рабочий профиль эксцентриков выполнен по логарифмической спирали, а рельсовый захват снабжен отдельным корпусом, опирающимся на рельс двумя ходовыми роликами.
Текст
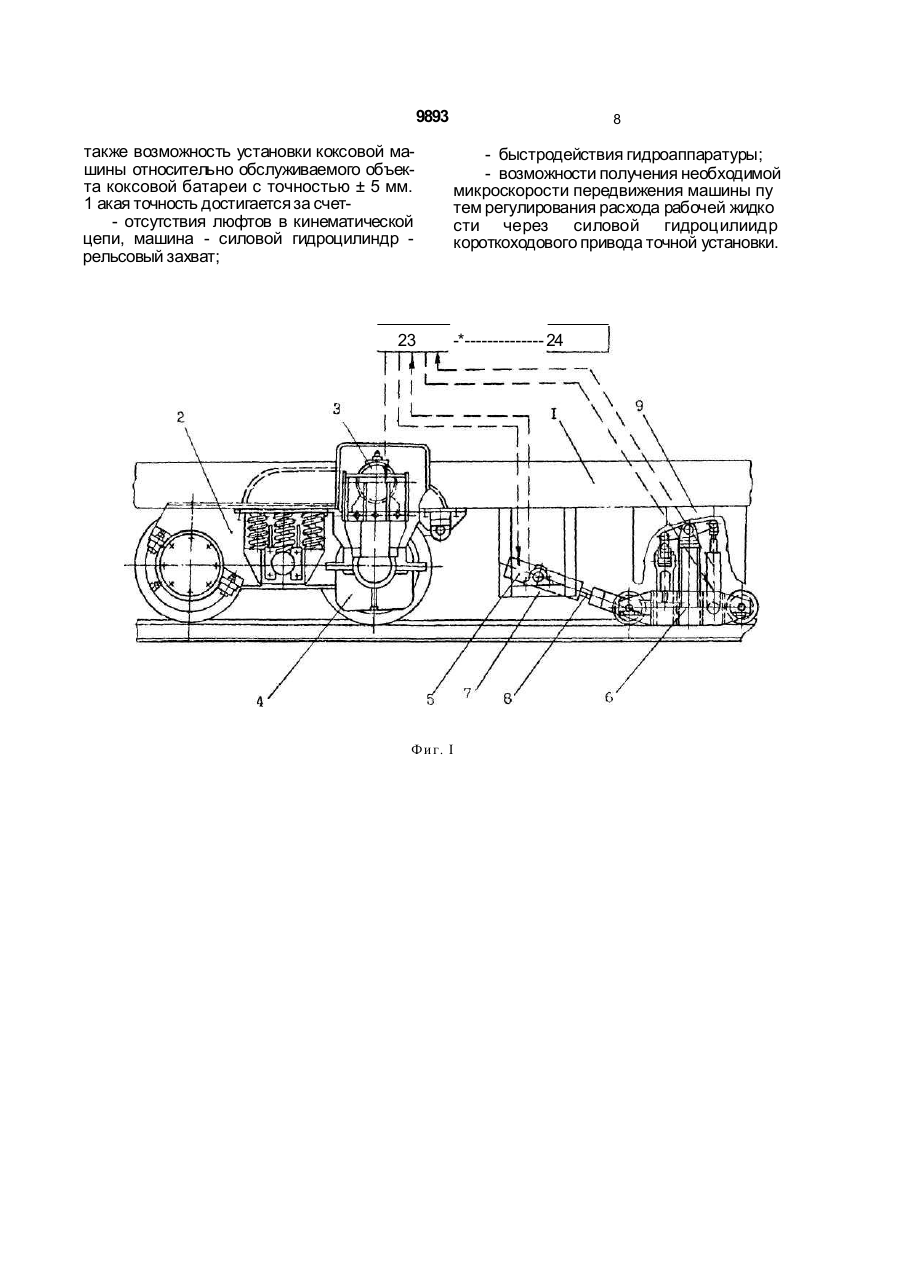
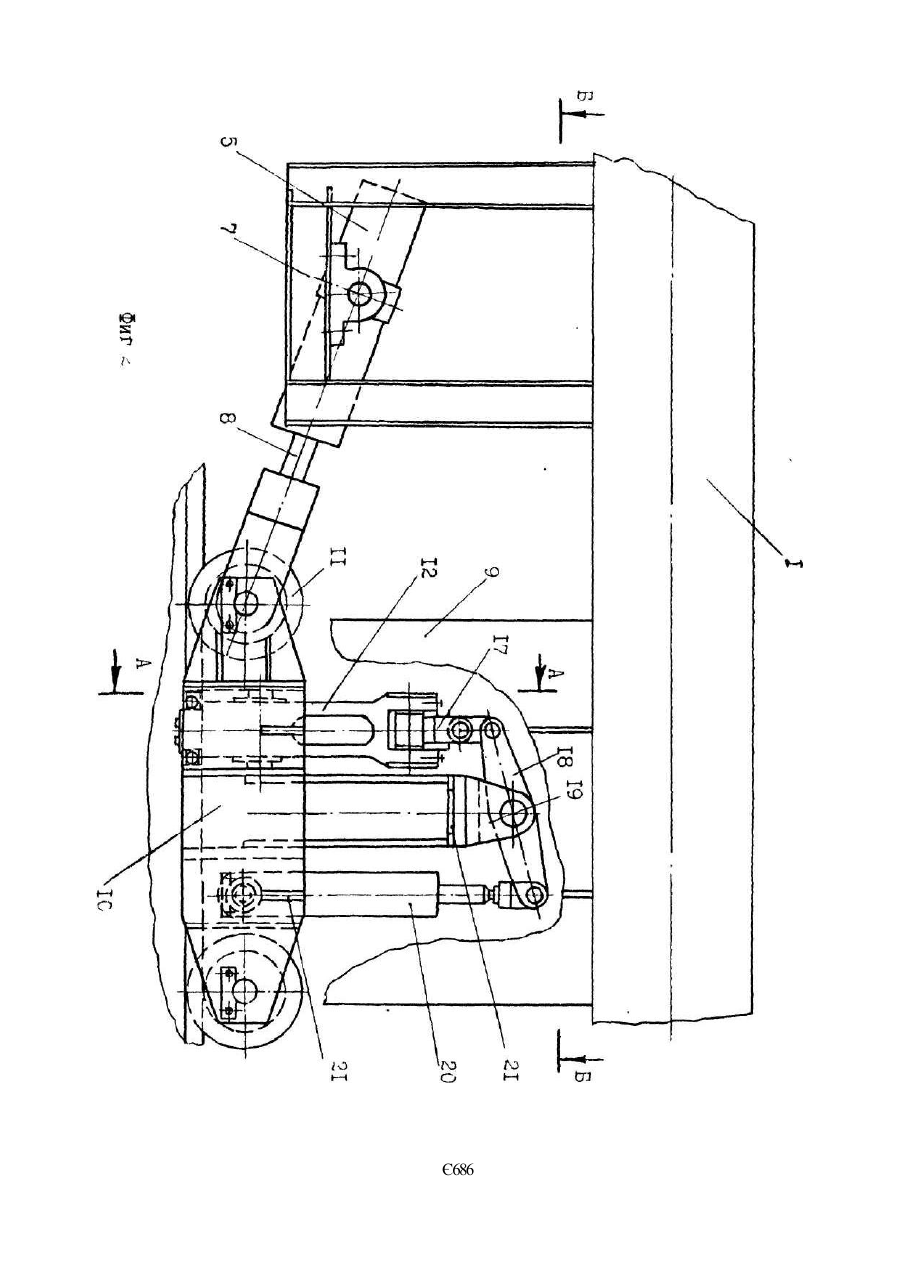
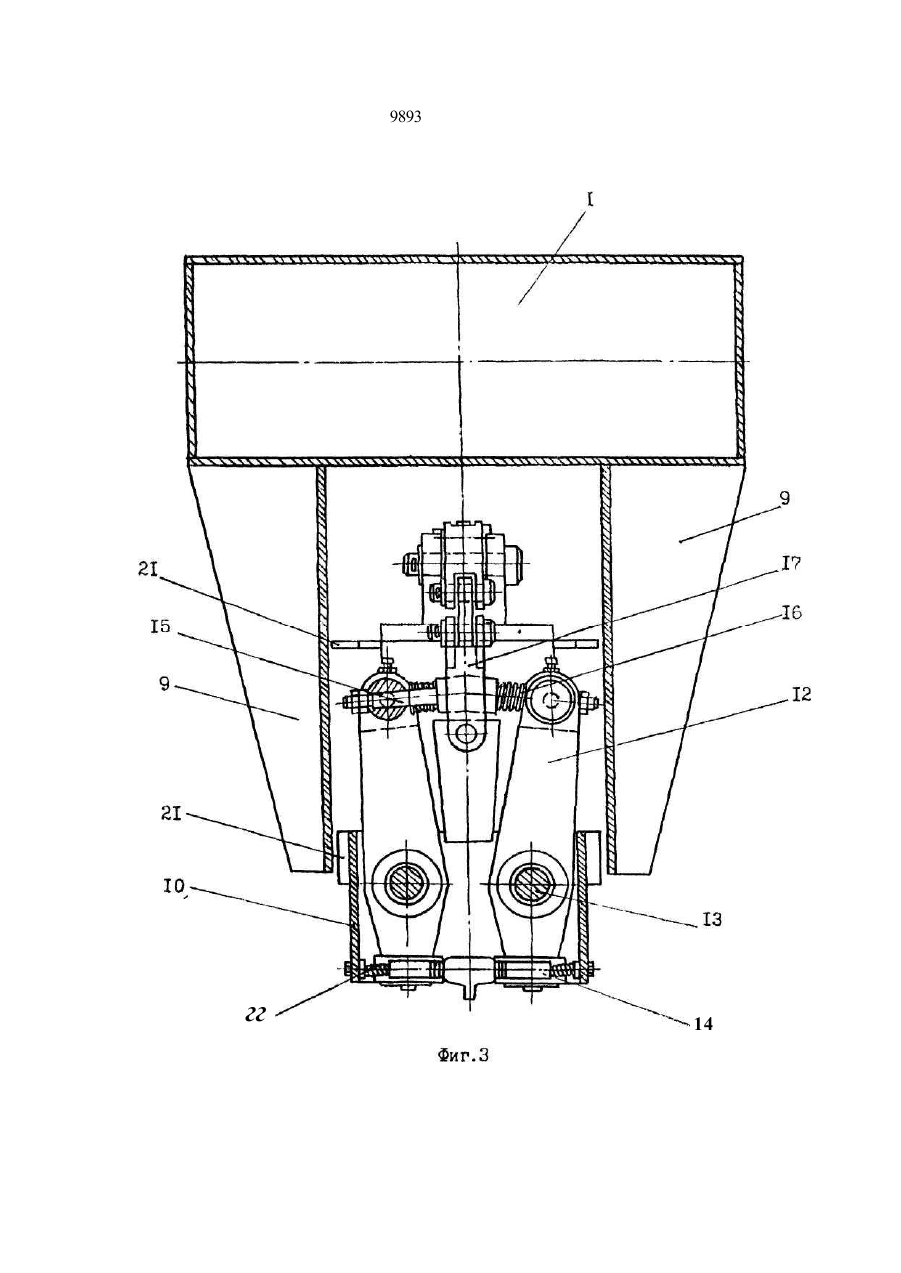
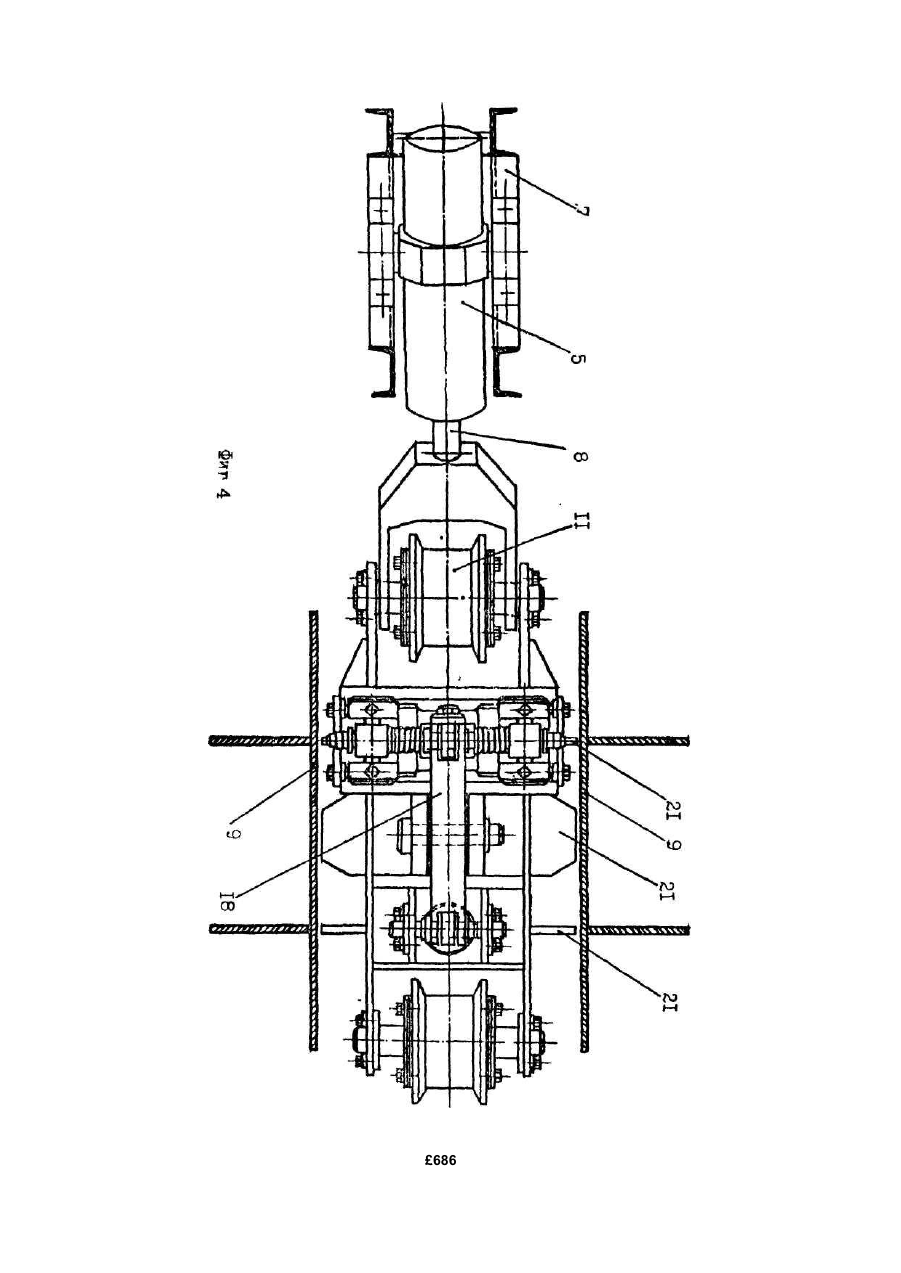
1 Приводная система коксовой машины, содержащая механизм передвижения с электромеханическими приводами ходовых колес, дополнительные короткоходовые приводы точной установки и устройство уп равления приводами, взаимодействующее с устройством определения положения маши Изобретение относится к конструктивным элементам коксовых машин, а именно к приводным системам, и может быть использовано в различных отраслях промышленности в качестве приводных систем рельсовых транспортных средств, к которым предъявляются повышенные требования к точности установки относительно обслуживаемых объектов Известна приводная система (1), обеспечивающая передвижение, например, углеэагрузочной машины по рельсовому пути, состоящая из четырех механизмов передвижения, каждый из которых включает подпружиненную балансирную тележку, в которой ны относительно обслуживаемого объекта, о т л и ч а ю щ а я с я тем, что каждый дополнительный короткоходовый привод точной установки выполнен в виде силового гидроцилиндра со штоком, снабженного рельсовым захватом, при этом рельсовый захват шарнирно соединен со штоком гидроцилиндра. 2. Приводная система коксовой машины по п. 1,о т л и ч а ю щ а я с я тем, что рельсовый захват выполнен с самозатягива ющимися эксцентриками двухстороннего действия. 3. Приводная система коксовой машины и 2, о т л и ч а ю щ а я с я тем, что рабочий профиль эксцентриков выполнен по логарифмической спирали, а рельсовый захват снабжен отдельным корпусом, опи рающимся на рельс двумя ходовыми ролика ми. ПОПП . 1 одно или оба колеса снабжены приводами, содержащими электродвигатель, редуктор, колодочный тормоз и соединительные муфты. Приводная система оборудована тиристорной установкой, обеспечивающей управление электродвигателями переменного тока, переход на "ползучую" скорость, равную 1/20 номинальной (в последних разработках достигнуто регулирование скорости 1 /35), и остановку машины у обслуживаемого объекта. Контроль точности установки машины выполняют бесконтактные сигнальные устройства АБСУ-ЗМ с ферромагнитными шунтами или датчик БСУ-3, ос со со О 9893 Ёшванные на принципе считывания магнитных меток с рельсов. Недостаток известной приводной системы заключается в недостаточной точности установки машины относительно обслужи- 5 ваемого объекта. Реально достигнутая точность установки коксовых машин составляет ±25 мм, в то время как для углезагрузочной машины требуется точность установки относительно загружаемой печи ± 5 мм. Основ- 10 ной причиной недостаточной точности установки машин относительно обслуживаемых объектов является отсутствие достаточно простых и надежных устройств для глубокого регулирования частоты вращения 15 приводных электродвигателей и наличие люфтов в кинематической цепи: вал электродвигателя - цепная муфта - редуктор - зубчатая муфта - вал ходового колеса. 1 Наиболее близкой к объекту изобрете- 20 ния является приводная система для механизмов, обслуживающих коксовых печи. Указанная приводная система содержит механизмы передвижения с электромеханическими приводами ходовых колес, допол- 25 нительные приводы точной установки и устройство управления приводами, взаимодействующее с устройством определения положения машины относительно обслуживаемого объекта, причем каждый привод со- 30 держит неуправляемую и управляемую муфты и редуктор. Основной привод предназначен для быстрого передвижения (со скоростью до 2 м) коксовой машины по рельсовому луш и грубой (предварительной) ус- 35 тановки ее относительно обслуживаемого объекта. Дополнительный привод служит для медленного передвижения (со скоростью до 0,01 м/с) коксовой машины в процессе ее установки относительно 40 обслуживаемого объекта с заданной точностью ( ±5 мм). Недостатки этой приводной системы определяются прежде всего недостатками уп- 45 равляемой муфты, такими, как сложность конструкции и недостаточная надежность в эксплуатации, особенно при большой частоте включений и выключений. К числу ее недостатков следует отнести и наличие люфтов 50 в кинематической цепи: вал двигателя - муфта редуктор-муфта -приводной вал ходового колеса. Зазо ры ме жд у зубьям и зубчатых колес редуктора и полумуфт дают возможность ходовому колесу повернуться 55 на некоторый угол даже при заторможенном вале двигателя, что приводит к смещению машины из зоны точной установки под воз действием, например, ветровой нагрузки или уклона пути. В основу изобретения поставлена задача с помощью простых средств обеспечить с заданной точностью надежную установку коксовых машин относительно обслуживаемого объекта. Поставленная задача решается тем, что в приводной системе коксовой машины, содержащей механизмы передвижения с электромеханическими приводами ходовых колес, дополнительные короткоходовые приводы точной установки и устройство управления приводами, взаимодействующее с устройством определения положения коксовой машины, согласно изобретению, каждый дополнительный короткоходовый привод точной установки выполнен в виде силового гидроцилиндра со штоком, снабженного рельсовым захватом, причем рельсовый захват шарнирно соединен со штоком гидроцилиндра. При этом рельсовый захват может быть выполнен с самозатягивающимися эксцентриками двухстороннего действия. Кроме того, рабочий профиль эксцентриков может быть выполнен по логарифмической спирали, а рельсовый захпат может быть снабжен отдельным корпусом, опирающимся на рельс двумя ходовыми роликами. Рельсовые захваты обычно используют для предотвращения самопроизвольного движения транспортных средств при ветровой нагрузке, т.е. для обеспечения их неподвижности. В объекте же изобретения рельсовый захват выполняет функции опорного устройства, относительно которого перемещается машина. Рельсовый захват с силовым гидроцилиндром позволяет обеспечить передвижение машины на сколь угодно малой скорости и точную установку относительно обслуживаемого объекта. Таким образом, передвижение машины на малой скорости и ее точная установка по оси обслуживаемого объекта в заявляемой приводной системе осуществляется с помощью более простых средств, чем в прототипе. Кроме того, отсутствие люфтов г> дополнительном приводе исключает возможность смещения машины из зоны точной установки (под воздействием ветровой нагрузки, уклона и т.п.); т.е. повышает надежность работы приводной системы. Сущность изобретения поясняется на примере выполнения приводной системы для углезагрузочной машины и чертежами, на которых изображены: на фиг. 1 - вид на приводную систему машину в направлении, перпендикулярном 9893 рельсовому пути (второй механизм передвиустройств, например, по авторскому свидежения условно не показан); тельству СССР № 368637, 299858. на фиг 2 - вид на дополнительный коПриводная система работает следуюроткоходовой гидромеханический привод щим образом. точной установки в направлении, перпенди- 5 Углезагрузочную машину с помощью оскулярной рельсовому пути; новного привода передвигают по батарее и на фиг. 3 - сечение А-А фиг. 2; устанавливают на коксовой печи, подлежащей загрузке. Выбор номера обслуживаена фиг. 4 - сечение Б-Б фиг. 2. Углезагрузочная машина опорными балмой печи и предварительную установку ками 1 опирается на механизм передвиже- 10 машины осуществляют устройством управния в виде четырех балансирных тележек 2 (по ления 23 электромеханическими приводами, взаимодействующим с бесконтактным две тележки с каждой стороны (фиг. 1). На устройством определения положения углераме каждой балансирной тележки 2 усзагрузочной машины 24. тановлены два привода: основной и дополПосле остановки машины выдвигают нительный. Основной привод предназначен 15 шток 8 силового гидроцилиндра 5 короткодля быстрого передвижения коксовой машины и ходового привода точной установки в промегрубой (предварительной) установки ее жуточное положение, соответствующее относительно обслуживаемого объекта и сопримерно 1/2 полного хода. держит электродвигатель 3 и редуктор 4. ДоПосле срабатывания гидроцилиндра 20 полнительный короткоходовой привод 20 предназначен для точной установки коксовой рычаги 12 поворачиваются на осях 13 и эксцентрики 14 входят в контакт с боковыми машины относительно обслуживаемого поверхностями головки рельса. Первонаобьекта и состоит из гидроцилиндра 5 и рельсового захвата 6. Корпус гидроцилиндра 5 чальное прижатие рабочих поверхностей эксцентриков 14 к головке рельса происхошарнирно установлен, например, на 25 дит под действием пружин 16. Положение кронштейне 7 опорной балки 1, а шток 8 звеньев рельсового захвата 6, готового к рагидроцилиндра соединен с рельсовым заботе, показано на фиг. 2-4. В зависимости хватом 6, установленным свободно (без жеот направления, в котором необходимо песткой связи) между направляющими стенками кронштейнов 9 опорной балки 1. 30 редвинуть машину (определяется устройством определения положения), шток 8 Рельсовый захват (см. фиг. 2-7) эксцентрисилового гидроцилиндра 5 либо продолжает кового типа смонтирован в корпусе 10, опивыдвигаться, либо начинает втягиваться. Пераю щемся на р ельс двумя опор ными ремещение связанного с ним рельсового зароликами 11. Двухплечие рычаги 12 установ6 вызывает заклинивание лены на осях 13. На нижних концах рычагов 35 хвата эксцентриков 14 и последующее передвиже12 смонтированы эксцентрики 14, которые ние всей машины относительно неподвижмогут поворачиваться вокруг вертикальных ного захвата 6. После выполнения осей. Верхние концы рычагов 12 тягами 15 с углезагрузочной машиной всех операций по пружинами 16 соединены с траверсой 17, которая, в свою очередь, соединена с двух- 40 обслуживанию коксовой печи (загрузка шихты, открывание-закрывание загрузочных плечим приводным рычагом 18. Приводной люков, крышек и клапанов стояков, кранов рычаг 18 шарнирно установлен на кронштейне 19 и соединен вторым концом со штоком инжекции, чистка привалочных поверхностей крышек стояков, чистка копен и колодгидроцилиндра 20. Перекос рельсового захвата 6 относи- 45 цев стояков, заливка крышек загрузочных люков уплотняющим раствором, уборка потельно направляющих стенок кронштейнов 9 верхности коксовой батареи от просылей ограничен упорами 21. Для.возврата эксугольной шихты и др.) с помощью гидроцицентриков 14 в исходное положение служат линдра 20 рычаги 12 устанавливают в транспружины 22. портное положение, при этом эксцентрики Управление основным и дополнитель- 50 14 отходят от головки рельса и пружинами ным приводами осуществляет устройство 22 устанавливаются в нейтральное положеуправления 23, взаимодействующее с устние, а шток 8 гидроцилиндра 5 полностью ройством 24 точной установки коксовой мавтягивается. Устройство готово к следующешины. му циклу работы. 55 Приводная система за счет исключения В качестве устройства управления приуправляемой соединительной муфты имеет водами может быть использовано, наприболее простую конструкцию, что повышает мер, устройство по авторскому надежность ее работы. Преимуществом свидетельству СССР № 361190, а для контпредлагаемой приводной системы является роля точности установки одно из известных 9893 также возможность установки коксовой машины относительно обслуживаемого объекта коксовой батареи с точностью ± 5 мм. 1 акая точность достигается за счет- отсутствия люфтов в кинематической цепи, машина - силовой гидроцилиндр рельсовый захват; 23 8 - быстродействия гидроаппаратуры; - возможности получения необходимой микроскорости передвижения машины пу тем регулирования расхода рабочей жидко сти через силовой гидроцилиидр короткоходового привода точной установки. -*-------------- 24 Фиг. I Є686 9893 гг 14 £686 9893 Упоря дник В.Жуков Замовлення 4557 Техред М.Моргентал Коректор О.Обручар Тираж Підписне Державне патентне ві домство Украї ни, 254655, ГСП, Киї в-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.ГагарІна. 101
ДивитисяДодаткова інформація
Назва патенту англійськоюThe homing system of coke machine
Автори англійськоюZhukov Volodymyr Ivanovych
Назва патенту російськоюПриводная система коксовой машины
Автори російськоюЖуков Владимир Иванович
МПК / Мітки
МПК: C10B 31/00
Мітки: приводна, машини, коксової, система
Код посилання
<a href="https://ua.patents.su/8-9893-privodna-sistema-koksovo-mashini.html" target="_blank" rel="follow" title="База патентів України">Приводна система коксової машини</a>
Гідравлічна система сільськогосподарської машини
Номер патенту: 6835
Опубліковано: 31.03.1995
Автори: Остапенко Олександр Андрійович, Лупенко Анатолій Олександрович
МПК: A01B 63/10, A01D 69/00
Мітки: гідравлічна, машини, сільськогосподарсько, система
Формула / Реферат:
(57) 1. Гидравлическая система сельскохозяйственной машины, преимущественно кормоуборочного комбайна, агрегатированного с трактором, включающая секционный гидрораспределитель, гидравлически связанный с гидроцилиндрами перемещения рабочих органов, гидронасосом и гидроемкостью, отличающаяся тем, что она снабжена трехпозиционным гидрораспределителем, две торцевые полости управления которого гидравлически сообщены соответственно с переключающими...
Притискний пристрій бази добувної машини

Номер патенту: 9828
Опубліковано: 30.09.1996
Автори: Бєлєнєцкий Едуард Аркадьович, Аніпрєєв Микола Сергійович, Іванов Генадій Федорович, Діденко Ігорь Євгенович
МПК: E21D 23/20
Мітки: базі, притискний, машини, пристрій, добувної
Формула / Реферат:
(57) Прижимное устройство базы добычной машины, включающее секцию базовой балки, соединенную со связанным с секцией крепи гидроцилиндром перемещения с помощью ползуна, корпус которого выполнен с продольным пазом для направляющей базовой балки, с другой стороны которой расположены направляющие для исполнительного органа, отличающее-с я тем, что корпус ползуна выполнен с верхним консольно расположенным со стороны гидроцилиндра перемещения...
Пристрій для ущільнення кришок завантажувальних люків коксової печі
Номер патенту: 6122
Опубліковано: 29.12.1994
Автори: Сєнічкін Анатолій Федорович, Каліберда Микола Стефанович, Поролов Володимир Васильович
МПК: C10B 25/00
Мітки: коксової, печі, завантажувальних, кришок, пристрій, ущільнення, люків
Формула / Реферат:
1. Устройство для уплотнения крышек загрузочных люков коксовой печи, включающее распределительное кольцо, установленное на люкосьеме, резервуар с мешалкой для раствора, установленный на портале углезагрузочной машины, и дозатор для выдачи определенного объема раствора из резервуара в распредилительное кольцо, отличающееся тем, что, с целью повышения эксплуатационной надежности устройства, дозатор выполнен в виде соединенной с нижней...
Гідравлічна система самохідної сільськогосподарської машини
Номер патенту: 9161
Опубліковано: 30.09.1996
Автори: Кузьмінов Вадим Георгійович, Вчорашній Іван Григорович, Збарський Борис Абрамович, Умеренко Аркадій Аркадійович
МПК: A01B 63/10, F15B 15/26
Мітки: самохідної, сільськогосподарсько, система, гідравлічна, машини
Формула / Реферат:
Гидравлическая система самоходной сельскохозяйственной машины, содержащая насос, соединенный через распределитель с гидроцилиндрами подъема рабочих органов и копирующих щупов автомата вождения, отличающаяся тем, что, с целью предотвращения поломок рабочих органов и щупов при движении машины задним ходом путем исключения ошибочных действий оператора, система снабжена блокировочным сервоцилиндром, штоковая полость которого подключена к...
Пристрій для знімання та установлення двері коксової печі
Номер патенту: 6119
Опубліковано: 29.12.1994
Автори: Гетьман Володимир Миколайович, Макаренко Віктор Данилович
МПК: C10B 25/00
Мітки: установлення, коксової, знімання, печі, двері, пристрій
Формула / Реферат:
1. Устройство для улавливания выбросов пыли при выдаче кокса, включающее кожух конического сечения с диффузором в верхней части, пылеуловитель, форсунки, установленные над пылеуловителем, средства для подачи воды в форсунки и средства для сбора и отвода шламовых вод, отличающееся тем, что, с целью повышения эффективности работы, пылеуловитель установлен в диффузоре и выполнен в виде зонта жалюзийного типа, угол наклона лопастей которого...
Попередній патент: Спосіб виготовлення електролюмінесцентних матричних екранів
Наступний патент: Пристрій для видачі коксу з печей коксової батареї
Випадковий патент: Спосіб культивування калусної тканини фатсії японської (fatsia japonica)