Пристрій для отримання тривимірних координат точок у просторі
Номер патенту: 103055
Опубліковано: 25.11.2015
Автори: Демешкін Олег Анатолійович, Демешкін Олександр Олегович
Формула / Реферат
1. Пристрій для отримання тривимірних координат, що містить штатний далекомір, який відрізняється тим, що містить станину, у якій закріплені взаємно перпендикулярні осі обертання, а саме горизонтальну та вертикальну осі, при цьому штатний далекомір прикріплений до однієї із них, при цьому до горизонтальних та вертикальних осей підключені відповідно горизонтальний та вертикальний датчики кутів, додатково містить закріплений над штатним далекоміром інструментальний дисплей, користувацький блок управління на ручці керування та націлювання, пристрій містить блок управління компонентами пристрою та відеокамеру, яка націлена на інструментальний дисплей та дисплей штатного далекоміра.
2. Пристрій за п. 1, який відрізняється тим, що станина складається із скріплених між собою опори та бічних стійок.
3. Пристрій за пп. 1-2, який відрізняється тим, що до станини прикріплені обойми із підшипниками,
4. Пристрій за пп. 1-3, який відрізняється тим, що до станини додатково прикріплені дві фіксуючі скоби горизонтального та вертикального датчиків кутів.
5. Пристрій за п. 1, який відрізняється тим, що до горизонтальної осі прикріплена фіксуюча опора.
6. Пристрій за п. 1, який відрізняється тим, що ручка керування та націлювання прикріплена до вертикальної осі.
7. Пристрій за п. 1, який відрізняється тим, що до вертикальної осі додатково прикріплена рама.
8. Пристрій за п. 1, п. 7, який відрізняється тим, що до рами прикріплені контейнер для штатного далекоміра та скоба для закріплення на ній інструментального дисплея, підсвітки та елементів кріплення відеокамери.
9. Пристрій за п. 1, який відрізняється тим, що як відеокамеру використовують веб-камеру або камеру смартфона.
10. Пристрій за п. 1, який відрізняється тим, що користувацький блок управління включає клавіатуру та дисплей для відображення етапів роботи.
Текст
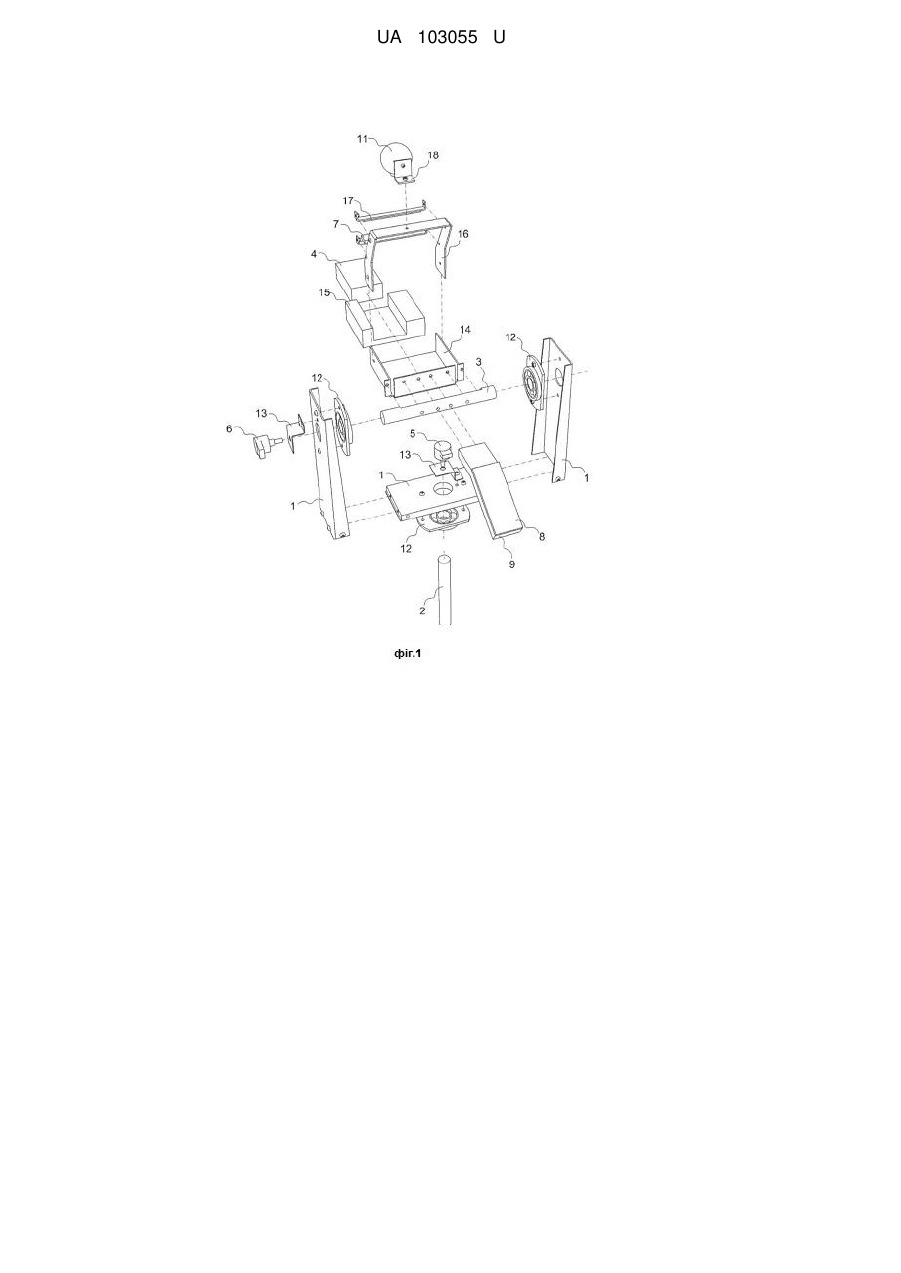
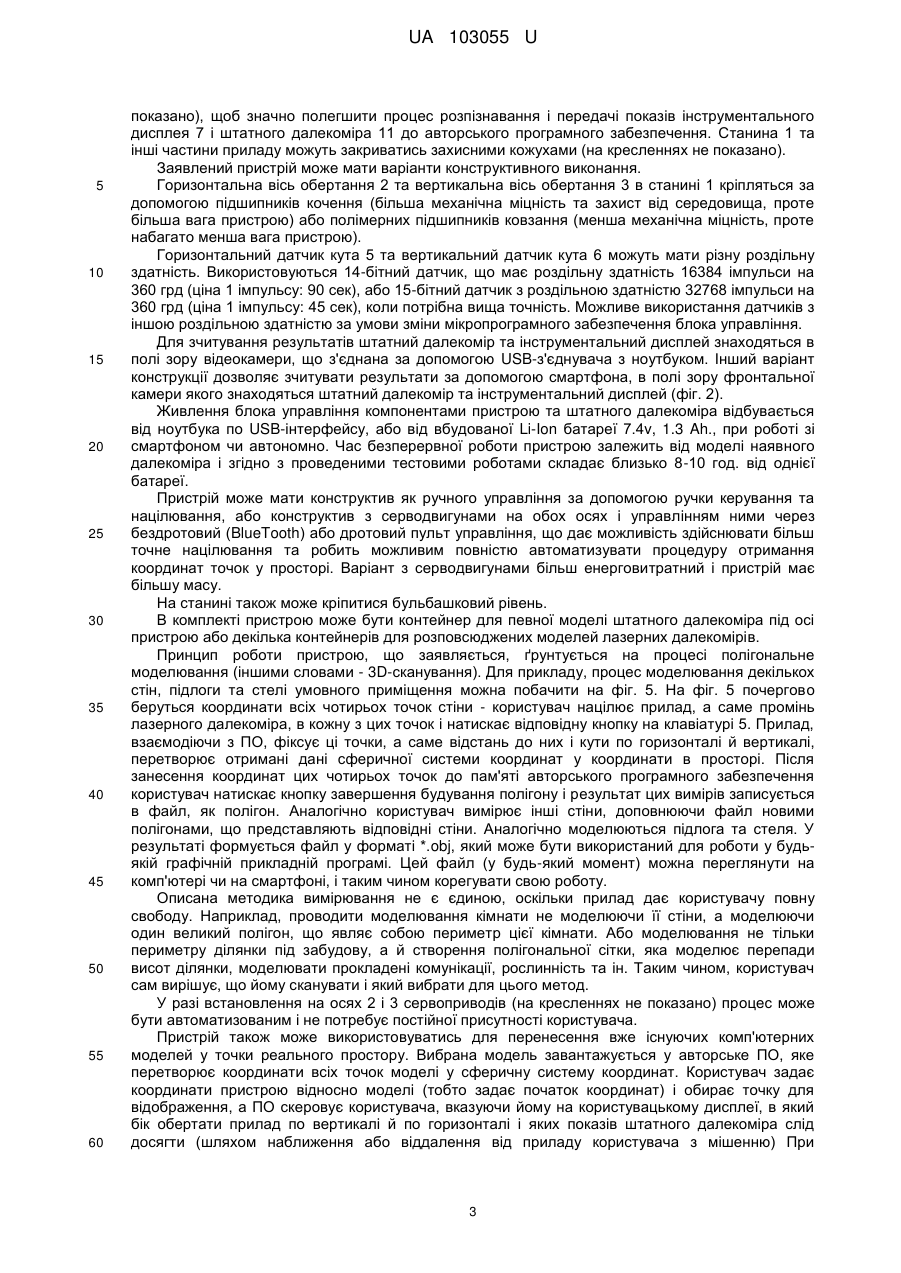
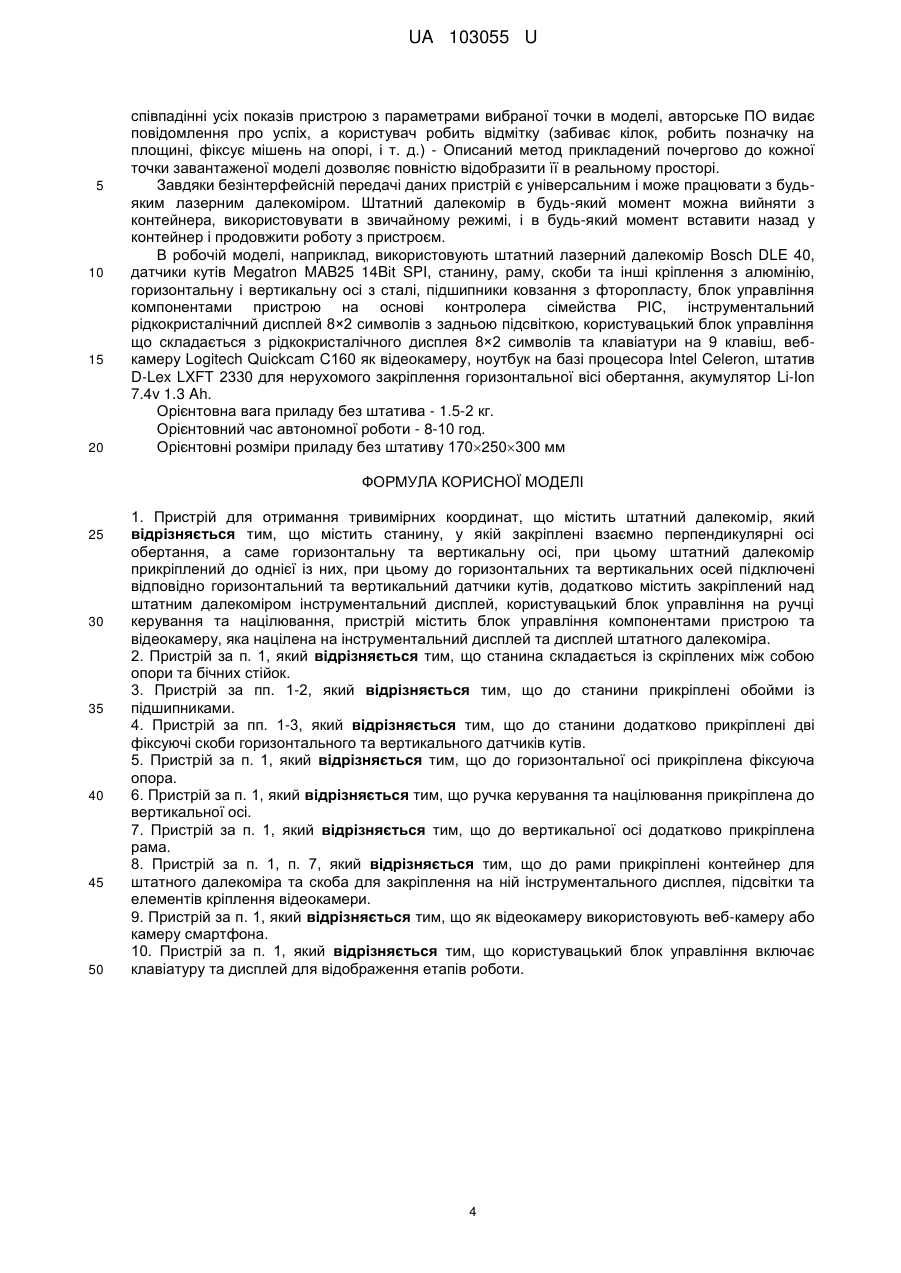
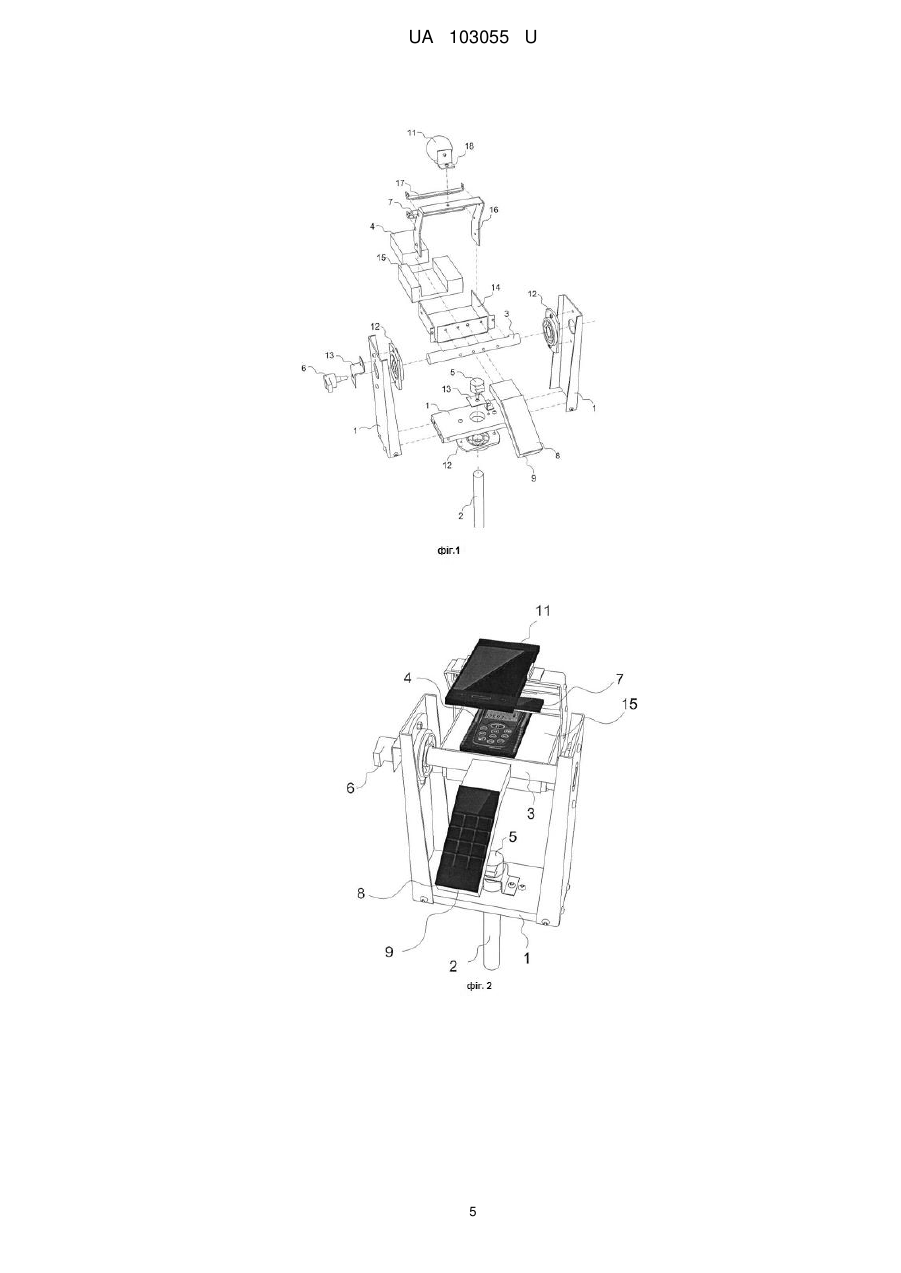
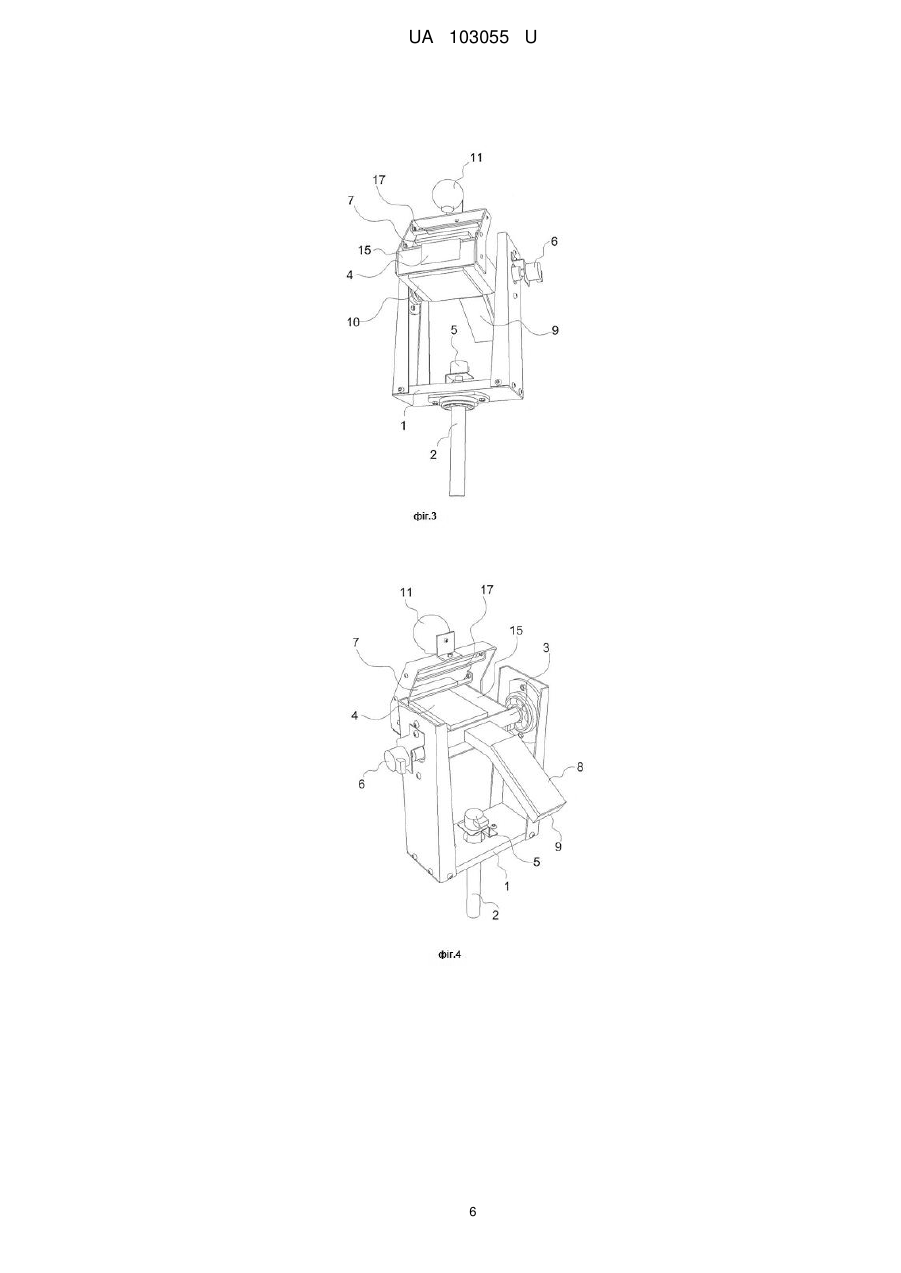
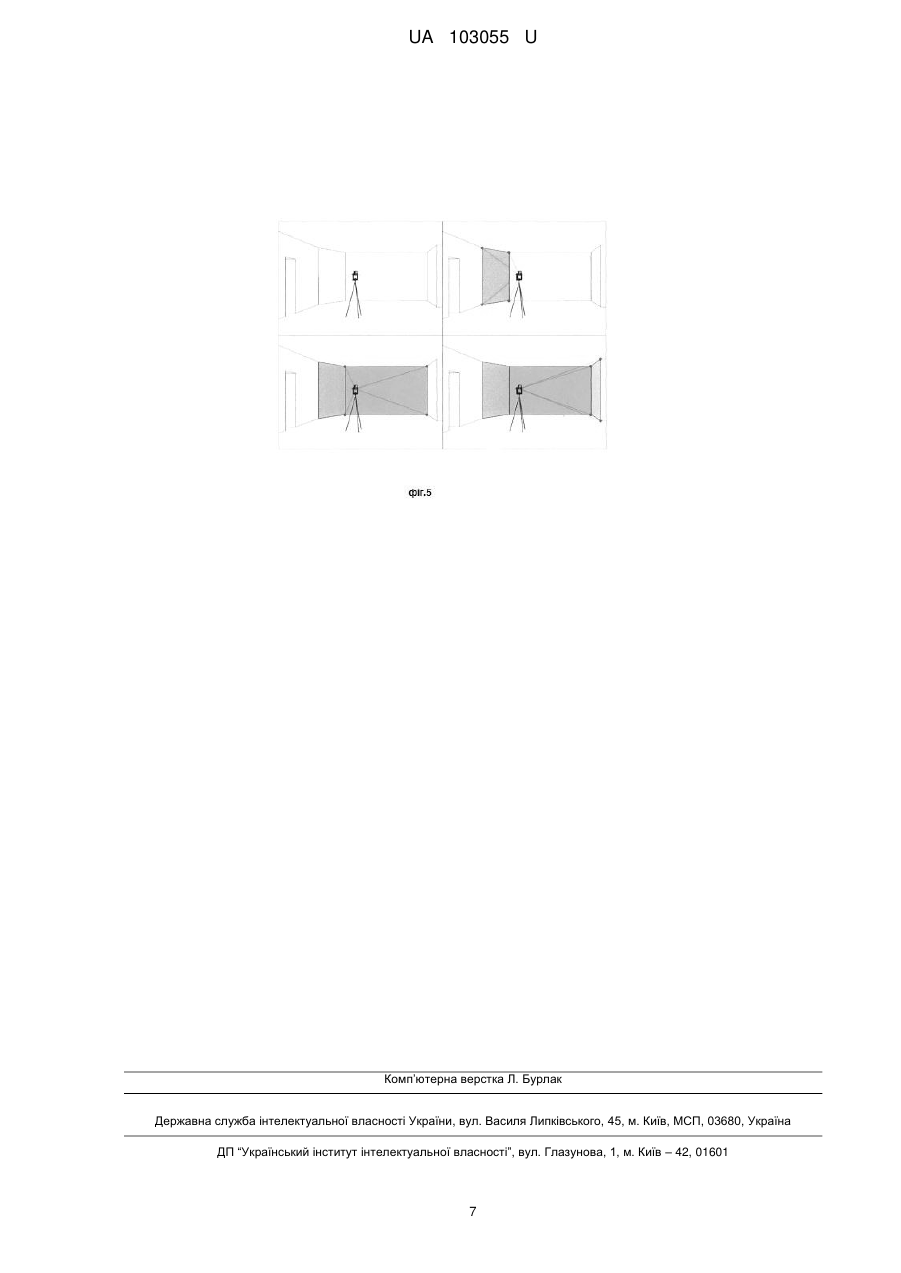
Реферат: Пристрій для отримання тривимірних координат містить штатний далекомір, станину, у якій закріплені взаємно перпендикулярні осі обертання, а саме горизонтальну та вертикальну осі. Штатний далекомір прикріплений до однієї із них, при цьому до горизонтальних та вертикальних осей підключені відповідно горизонтальний та вертикальний датчики кутів. Додатково містить закріплений над штатним далекоміром інструментальний дисплей, користувацький блок управління на ручці керування та націлювання, пристрій містить блок управління компонентами пристрою та відеокамеру, яка націлена на інструментальний дисплей та дисплей штатного далекоміра. UA 103055 U (12) UA 103055 U UA 103055 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до сфери будівельного та геодезичного приладобудування та може бути використана для вимірювань в будівництві, 3D проектуванні та дизайні. Відомі пристрої, що базуються на технологіях оптичного та/або лазерного сканування. Наприклад лазерний сканер Topcon GLS-1500 (http://www.qsi.ru/cataloa/laser scanner/to peon qls 1500). Leica TDRA (http://promqeo.com/products/tdra6000). Trimble TX, Creaform-VIUscan (http://www.jetcom.ru/production/3d-canners/laser/creaform/viuscan.html) та інші. Згадані пристрої складаються із апаратної частини та програмного забезпечення та використовуються у архітектурі та геодезії, для маркшейдерских робіт, при скануванні відносно дрібних моделей (меблі, скульптури і т. д.). Наведені пристрої мають високу ціну, складні в експлуатації, характеризуються порівняно великими габаритами та вагою. Відомі вимірювальні пристрої - лазерні далекоміри (пристрій для вимірювання відстаней із використанням лазерного променю (https://ru.wikipedia.orq/wik/лазерный дальномер)). Портативні лазерні далекоміри широко використовуються в будівництві. Вони мають високу точність, невеликі масогабаритні параметри, ергономічні і використовуються в основному для виміру в ручному режимі лінійних параметрів і внутрішніх обчислень цих параметрів до величин площі та об'єму. Максимальна вимірювана відстань (15-250 м) і точність залежить від моделі далекоміра. Цифровий інтерфейс для виводу даних у далекоміра відсутній, його покази можна записати на папері або запам'ятати. Відомі фазові лазерні далекоміри, що містять приймально-передавальну систему, вимірювальний і опорний канали, фазовимірювальний пристрій, відліковий пристрій і блок управління і обробки отриманих даних. Недоліками таких рішень є їх обмежена функціональність, оскільки такі пристрої передбачають лише вимірювання відстані до об'єкта, можливість визначення площі приміщень, їх об'єму, висоти стін. При цьому такі обрахунки проводяться вручну після отримання результатів вимірювання лазерним далекоміром. Найближчим аналогом взято фазовий далекомір (Патент РФ № 2139498), який містить корпус, встановлені в ньому приймальну і передавальну оптичні системи, джерело випромінювання, фотоприймаючий пристрій у вигляді лавинного фотодіода і фазометр, містить автоматичний регулятор рівня сигналу, виконаний у вигляді послідовно з'єднаних підсилювача, амплітудного детектора і керованого високовольтного джерела, з'єднаного з катодом лавинного фотодіода, другий вхід катоду з'єднаний з виходом гетеродинного генератора, об'єктив приймальні оптичної системи, виконаний з центральним отвором, в якому через світлоізолятор встановлена поворотна відбивна призма передавальної оптичної системи, при цьому відбивна грань призми розташована під кутом 45 градусів до оптичної осі об'єктива. Недоліком найближчого аналога є його обмежена функціональність, оскільки такі пристрої передбачають лише вимірювання відстані до об'єкта, можливість визначення площі приміщень, їх об'єму, висоти стін. При цьому такі обрахунки проводяться вручну після отримання результатів вимірювання лазерним далекоміром. В основу корисної моделі поставлено задачу створити пристрій для отримання трьохвимірних координат, що шляхом внесення додаткових елементів конструкції дозволяє розширити функціональність відомого лазерного далекоміра для отримання тривимірних координат точок у просторі. Поставлена задача вирішується шляхом створення пристрою для отримання трьохвимірних координат, що містить штатний далекомір, який згідно з корисною моделлю, містить станину, в якій закріплені взаємно перпендикулярні осі обертання, а саме горизонтальну та вертикальну осі, при цьому штатний далекомір прикріплений до однієї із них, при цьому до горизонтальних та вертикальних осей підключені горизонтальний та вертикальний датчик кутів відповідно, додатково містить закріплений над штатним далекоміром інструментальний дисплей, користувацький блок управління на ручці керування та націлювання, блок управління компонентами пристрою, відеокамеру, яка націлена на інструментальний дисплей та дисплей штатного далекоміра. Водночас, станина складається із скріплених між собою опори та бічних стійок, до неї прикріплені обойми із підшипниками, також до станини додатково прикріплені дві фіксуючі скоби горизонтального та вертикального датчиків кутів. Фіксуюча опора кріпиться до горизонтальної осі. Ручка керування та націлювання прикріплена до вертикальної осі. До вертикальної осі додатково прикріплена рама для закріплення в ній контейнера для далекоміра, скоби для закріплення на ній інструментального дисплея, підсвітки та елементи кріплення відеокамери. Як відеокамеру використовують веб-камеру або камеру смартфона. Користувацький блок управління включає клавіатуру та дисплей для відображення етапів роботи. Суть корисної моделі пояснюється кресленням, де схематично зображені елементи пристрою фіг. 1: 1 UA 103055 U 5 10 15 20 25 30 35 40 45 50 55 60 1. Станина (опора і бічні стійки) 2. Горизонтальна вісь обертання 3. Вертикальна вісь обертання 4. Штатний далекомір 5. Горизонтальний датчик кута 6. Вертикальний датчик кута 7. Інструментальний дисплей 8. Користувацький блок управління 9. Ручка керування та націлювання 10. Блок управління компонентами пристрою 11. Відеокамера 12. Обойми із підшипниками 13. Фіксуючі скоби горизонтального та вертикального датчиків кутів 14. Рама 15. Контейнер 16. Скоба 17. Підсвітка 18. Елементи кріплення відеокамери На фіг. 2 наведено приклад зовнішнього вигляду пристрою із користувацьким блоком управління, інструментальним дисплеєм, штатним далекоміром та смартфоном. На фіг. 3 наведений вигляд пристрою спереду, на фіг. 4 - вигляд пристрою ззаду. Використання горизонтального та вертикального датчиків кутів у складі пристрою дозволяє отримувати значення відповідних кутів сферичної системи координат, які в комбінації із показами штатного далекоміра дозволяють через запропоновану систему взаємопов'язаних елементів (блок керування компонентами пристрою, інструментального дисплея та відеокамери) та шляхом перетворення сферичної системи координат у декартову отримати не лише відстань до точки, а й її тривимірні координати у просторі, що фактично є досягненням поставленого технічного результату. Станина 1 (складається з опори і бічних стінок) вільно обертається навколо нерухомо закріпленої горизонтальної осі обертання 2. В станині 1 також встановлена вертикальна вісь обертання 3, до якої прикріплений штатний далекомір 4. Горизонтальний датчик кута 5 і вертикальний датчик кута б з'єднуються своїми валами з горизонтальною 2 і вертикальною 3 віссю обертання відповідно і дають змогу визначати кут обертання кожної з цих осей окремо. Над штатним далекоміром 4 знаходиться інструментальний дисплей 7, що слугує для виводу кутів обертання осей, а також коду етапу роботи пристрою. Обробку показів обох датчиків кутів, а також обробку команд, введених з закріпленого на ручці керування та націлювання 9 користувацького блока управління 8, здійснює блок управління компонентами пристрою 10. Цей блок також забезпечує живлення всіх електрокомпонентів приладу, в тому числі і штатного далекоміра 4. Відеокамера 11, закріплена над штатним далекоміром 4 і дисплеєм користувацького блока управління 8, забезпечує безінтерфейсну передачу показів цих приладів до комп'ютерного програмного забезпечення, яке в свою чергу шляхом розпізнавання образів перетворює їх покази з графічного у цифровий вигляд. Обойми з підшипниками 12 слугують для вільного обертання станини 1 навколо горизонтальної осі обертання 2 і для обертання вертикальної осі обертання 3 навколо станини 1. Фіксуючі скоби 13 слугують для закріплення на станині 1 вертикального датчика кута 6 і горизонтального датчика кута 5 та перешкоджають обертанню їх корпусу разом з осями, з якими вони з'єднані своїми валами. Рама 14, що нерухомо закріплена на вертикальній осі обертання 3, слугує для кріплення контейнера 15 і скоби 16. У контейнері виконане спеціальне гніздо по формі штатного далекоміра 4 - це забезпечує точне центрування осі вимірювання штатного далекоміра 4 і осі вимірювання пристрою (це уявна вісь, що є перпендикуляром до вертикальної і горизонтальної осей обертання, проведена з уявної точки їх перетину), а також швидкий монтаж та демонтаж штатного далекоміра 4. За допомогою спеціальних кріплень контейнер можна швидко вийняти та вставити назад у раму 14. На скобі 16, що кріпиться на рамі, закріплена підсвітка 17, інструментальний дисплей 7 та відеокамера 11. Підсвітка 17 забезпечує видимість показів штатного далекоміра 4 і інструментального дисплея 7 для відеокамери 11, таким чином дає змогу розпізнати їх і перетворити у числовий формат за допомогою авторського програмного забезпечення. Елементи кріплення відеокамери 11 розташовані зверху скоби 16 і забезпечують нерухоме положення відеокамери 11 відносно штатного далекоміра 4, інструментального дисплея 7 і підсвітки 17. Відеокамера 11, під світка 17, інструментальний дисплей 7 і дисплей штатного далекоміра 4 можуть закриватись світлонепроникним ковпаком (на малюнках не 2 UA 103055 U 5 10 15 20 25 30 35 40 45 50 55 60 показано), щоб значно полегшити процес розпізнавання і передачі показів інструментального дисплея 7 і штатного далекоміра 11 до авторського програмного забезпечення. Станина 1 та інші частини приладу можуть закриватись захисними кожухами (на кресленнях не показано). Заявлений пристрій може мати варіанти конструктивного виконання. Горизонтальна вісь обертання 2 та вертикальна вісь обертання 3 в станині 1 кріпляться за допомогою підшипників кочення (більша механічна міцність та захист від середовища, проте більша вага пристрою) або полімерних підшипників ковзання (менша механічна міцність, проте набагато менша вага пристрою). Горизонтальний датчик кута 5 та вертикальний датчик кута 6 можуть мати різну роздільну здатність. Використовуються 14-бітний датчик, що має роздільну здатність 16384 імпульси на 360 грд (ціна 1 імпульсу: 90 сек), або 15-бітний датчик з роздільною здатністю 32768 імпульси на 360 грд (ціна 1 імпульсу: 45 сек), коли потрібна вища точність. Можливе використання датчиків з іншою роздільною здатністю за умови зміни мікропрограмного забезпечення блока управління. Для зчитування результатів штатний далекомір та інструментальний дисплей знаходяться в полі зору відеокамери, що з'єднана за допомогою USB-з'єднувача з ноутбуком. Інший варіант конструкції дозволяє зчитувати результати за допомогою смартфона, в полі зору фронтальної камери якого знаходяться штатний далекомір та інструментальний дисплей (фіг. 2). Живлення блока управління компонентами пристрою та штатного далекоміра відбувається від ноутбука по USB-інтерфейсу, або від вбудованої Li-Ion батареї 7.4v, 1.3 Ah., при роботі зі смартфоном чи автономно. Час безперервної роботи пристрою залежить від моделі наявного далекоміра і згідно з проведеними тестовими роботами складає близько 8-10 год. від однієї батареї. Пристрій може мати конструктив як ручного управління за допомогою ручки керування та націлювання, або конструктив з серводвигунами на обох осях і управлінням ними через бездротовий (BlueTooth) або дротовий пульт управління, що дає можливість здійснювати більш точне націлювання та робить можливим повністю автоматизувати процедуру отримання координат точок у просторі. Варіант з серводвигунами більш енерговитратний і пристрій має більшу масу. На станині також може кріпитися бульбашковий рівень. В комплекті пристрою може бути контейнер для певної моделі штатного далекоміра під осі пристрою або декілька контейнерів для розповсюджених моделей лазерних далекомірів. Принцип роботи пристрою, що заявляється, ґрунтується на процесі полігональне моделювання (іншими словами - 3D-сканування). Для прикладу, процес моделювання декількох стін, підлоги та стелі умовного приміщення можна побачити на фіг. 5. На фіг. 5 почергово беруться координати всіх чотирьох точок стіни - користувач націлює прилад, а саме промінь лазерного далекоміра, в кожну з цих точок і натискає відповідну кнопку на клавіатурі 5. Прилад, взаємодіючи з ПО, фіксує ці точки, а саме відстань до них і кути по горизонталі й вертикалі, перетворює отримані дані сферичної системи координат у координати в просторі. Після занесення координат цих чотирьох точок до пам'яті авторського програмного забезпечення користувач натискає кнопку завершення будування полігону і результат цих вимірів записується в файл, як полігон. Аналогічно користувач вимірює інші стіни, доповнюючи файл новими полігонами, що представляють відповідні стіни. Аналогічно моделюються підлога та стеля. У результаті формується файл у форматі *.obj, який може бути використаний для роботи у будьякій графічній прикладній програмі. Цей файл (у будь-який момент) можна переглянути на комп'ютері чи на смартфоні, і таким чином корегувати свою роботу. Описана методика вимірювання не є єдиною, оскільки прилад дає користувачу повну свободу. Наприклад, проводити моделювання кімнати не моделюючи її стіни, а моделюючи один великий полігон, що являє собою периметр цієї кімнати. Або моделювання не тільки периметру ділянки під забудову, а й створення полігональної сітки, яка моделює перепади висот ділянки, моделювати прокладені комунікації, рослинність та ін. Таким чином, користувач сам вирішує, що йому сканувати і який вибрати для цього метод. У разі встановлення на осях 2 і 3 сервоприводів (на кресленнях не показано) процес може бути автоматизованим і не потребує постійної присутності користувача. Пристрій також може використовуватись для перенесення вже існуючих комп'ютерних моделей у точки реального простору. Вибрана модель завантажується у авторське ПО, яке перетворює координати всіх точок моделі у сферичну систему координат. Користувач задає координати пристрою відносно моделі (тобто задає початок координат) і обирає точку для відображення, а ПО скеровує користувача, вказуючи йому на користувацькому дисплеї, в який бік обертати прилад по вертикалі й по горизонталі і яких показів штатного далекоміра слід досягти (шляхом наближення або віддалення від приладу користувача з мішенню) При 3 UA 103055 U 5 10 15 20 співпадінні усіх показів пристрою з параметрами вибраної точки в моделі, авторське ПО видає повідомлення про успіх, а користувач робить відмітку (забиває кілок, робить позначку на площині, фіксує мішень на опорі, і т. д.) - Описаний метод прикладений почергово до кожної точки завантаженої моделі дозволяє повністю відобразити її в реальному просторі. Завдяки безінтерфейсній передачі даних пристрій є універсальним і може працювати з будьяким лазерним далекоміром. Штатний далекомір в будь-який момент можна вийняти з контейнера, використовувати в звичайному режимі, і в будь-який момент вставити назад у контейнер і продовжити роботу з пристроєм. В робочій моделі, наприклад, використовують штатний лазерний далекомір Bosch DLE 40, датчики кутів Megatron MAB25 14Bit SPI, станину, раму, скоби та інші кріплення з алюмінію, горизонтальну і вертикальну осі з сталі, підшипники ковзання з фторопласту, блок управління компонентами пристрою на основі контролера сімейства РІС, інструментальний рідкокристалічний дисплей 8×2 символів з задньою підсвіткою, користувацький блок управління що складається з рідкокристалічного дисплея 8×2 символів та клавіатури на 9 клавіш, вебкамеру Logitech Quickcam C160 як відеокамеру, ноутбук на базі процесора Intel Celeron, штатив D-Lex LXFT 2330 для нерухомого закріплення горизонтальної вісі обертання, акумулятор Li-Ion 7.4v 1.3 Ah. Орієнтовна вага приладу без штатива - 1.5-2 кг. Орієнтовний час автономної роботи - 8-10 год. Орієнтовні розміри приладу без штативу 170250300 мм ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 1. Пристрій для отримання тривимірних координат, що містить штатний далекомір, який відрізняється тим, що містить станину, у якій закріплені взаємно перпендикулярні осі обертання, а саме горизонтальну та вертикальну осі, при цьому штатний далекомір прикріплений до однієї із них, при цьому до горизонтальних та вертикальних осей підключені відповідно горизонтальний та вертикальний датчики кутів, додатково містить закріплений над штатним далекоміром інструментальний дисплей, користувацький блок управління на ручці керування та націлювання, пристрій містить блок управління компонентами пристрою та відеокамеру, яка націлена на інструментальний дисплей та дисплей штатного далекоміра. 2. Пристрій за п. 1, який відрізняється тим, що станина складається із скріплених між собою опори та бічних стійок. 3. Пристрій за пп. 1-2, який відрізняється тим, що до станини прикріплені обойми із підшипниками. 4. Пристрій за пп. 1-3, який відрізняється тим, що до станини додатково прикріплені дві фіксуючі скоби горизонтального та вертикального датчиків кутів. 5. Пристрій за п. 1, який відрізняється тим, що до горизонтальної осі прикріплена фіксуюча опора. 6. Пристрій за п. 1, який відрізняється тим, що ручка керування та націлювання прикріплена до вертикальної осі. 7. Пристрій за п. 1, який відрізняється тим, що до вертикальної осі додатково прикріплена рама. 8. Пристрій за п. 1, п. 7, який відрізняється тим, що до рами прикріплені контейнер для штатного далекоміра та скоба для закріплення на ній інструментального дисплея, підсвітки та елементів кріплення відеокамери. 9. Пристрій за п. 1, який відрізняється тим, що як відеокамеру використовують веб-камеру або камеру смартфона. 10. Пристрій за п. 1, який відрізняється тим, що користувацький блок управління включає клавіатуру та дисплей для відображення етапів роботи. 4 UA 103055 U 5 UA 103055 U 6 UA 103055 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for the determination of three-dimensinal coordinates
Автори англійськоюDemeshkin Oleh Anatoliiovych, Demeshkin Oleksandr Olehovych
Назва патенту російськоюУстройство для получения трехмерных координат точек в пространстве
Автори російськоюДемешкин Олег Анатолиевич, Демешкин Александр Олегович
МПК / Мітки
МПК: G01C 3/02
Мітки: отримання, пристрій, просторі, тривимірних, координат, точок
Код посилання
<a href="https://ua.patents.su/9-103055-pristrijj-dlya-otrimannya-trivimirnikh-koordinat-tochok-u-prostori.html" target="_blank" rel="follow" title="База патентів України">Пристрій для отримання тривимірних координат точок у просторі</a>
Пристрій для безконтактного зняття координат точок перерізу об’єкта
Номер патенту: 102409
Опубліковано: 26.10.2015
Автори: Узік Вікторія Василівна, Богушко Олександр Андрійович, Пашкевич Калина Лівіанівна
Мітки: зняття, координат, об'єкта, безконтактного, пристрій, точок, перерізу
Формула / Реферат:
Пристрій для безконтактного зняття координат точок перерізу об'єкта, що містить фронтальну площину, дискову платформу із зафіксованим центром на фронтальній площині, круговий транспортир, розділений на сектори і закріплений на фронтальній площині, та лазерний випромінювач, який відрізняється тим, що додатково оснащений кронштейном, закріпленим на фронтальній площині та магнітом, закріпленим на дисковій платформі, а лазерний випромінювач...
Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта
Номер патенту: 32140
Опубліковано: 12.05.2008
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
МПК: G01B 15/02
Мітки: автоматизованого, поверхні, точок, визначення, криволінійної, координат, об'єкта, пристрій, тривимірної
Формула / Реферат:
Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об'єкта, що містить блок опромінення поверхні об'єкта і блок реєстрації зображення опроміненої поверхні, який відрізняється тим, що блок опромінення поверхні об'єкта виконаний з можливістю опромінення поверхні об'єкта системою паралельних ліній, розташованих у світловій чи несвітловій області електромагнітного спектра випромінювань, блок реєстрації...
Пристрій для реєстрації координат положення голови в просторі
Номер патенту: 19644
Опубліковано: 25.12.1997
Автори: Мартиненко Ігор Генадієвич, Герасименко Юрій Петрович
МПК: A61B 5/103, G01B 5/004
Мітки: пристрій, голови, координат, положення, реєстрації, просторі
Формула / Реферат:
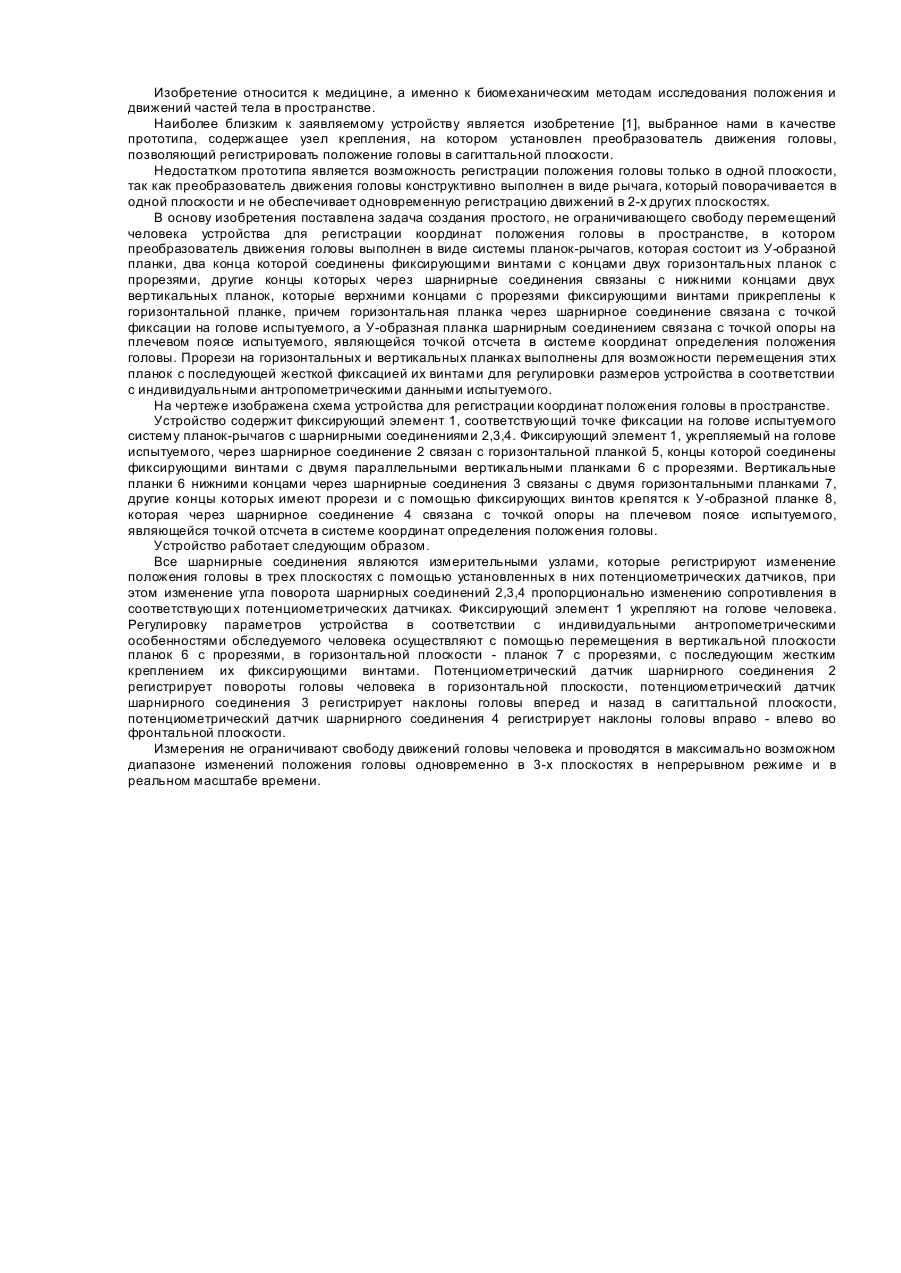
Устройство для регистрации координат положения головы в пространстве, содержащее преобразователь движения головы, отличающееся тем, что преобразователь движения головы выполнен в виде системы планок-рычагов, которая состоит из У-образной планки, два конца которой соединены фиксирующими винтами с концами двух горизонтальных планок с прорезями, другие концы которых через шарнирные соединения связаны с нижними концами двух вертикальных планок,...
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Мица Вікторія Василівна, Славінська Алла Людвігівна, Михайловський Юрій Броніславович
МПК: A41H 1/00
Мітки: спосіб, координат, манекена, поверхні, точок, визначення
Формула / Реферат:
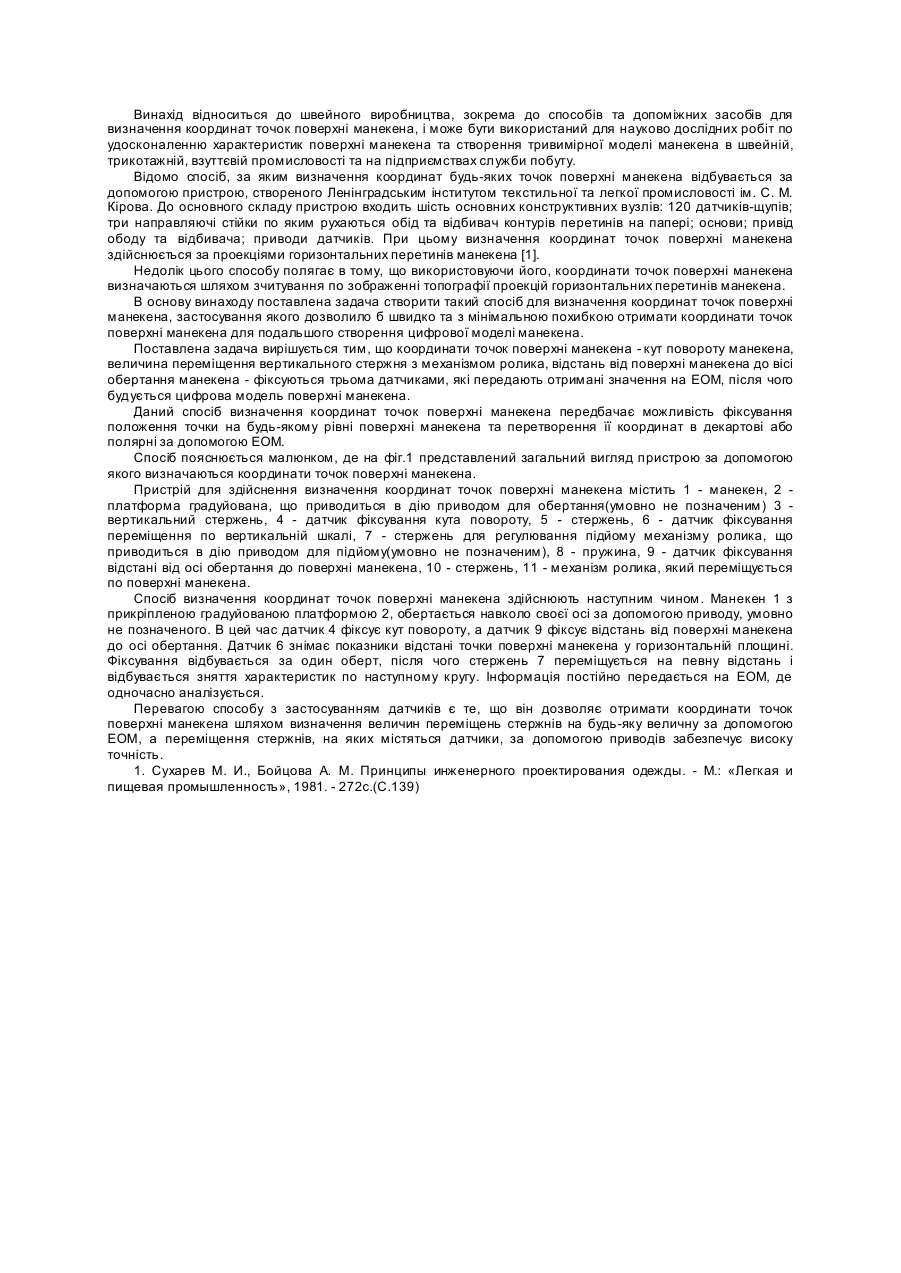
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Спосіб визначення координат точок на земній поверхні
Номер патенту: 81303
Опубліковано: 25.12.2007
Автори: Шевченко Тарас Георгійович, Глотов Володимир Миколайович, Третяк Корнилій Романович
Мітки: спосіб, визначення, земній, поверхні, координат, точок
Формула / Реферат:
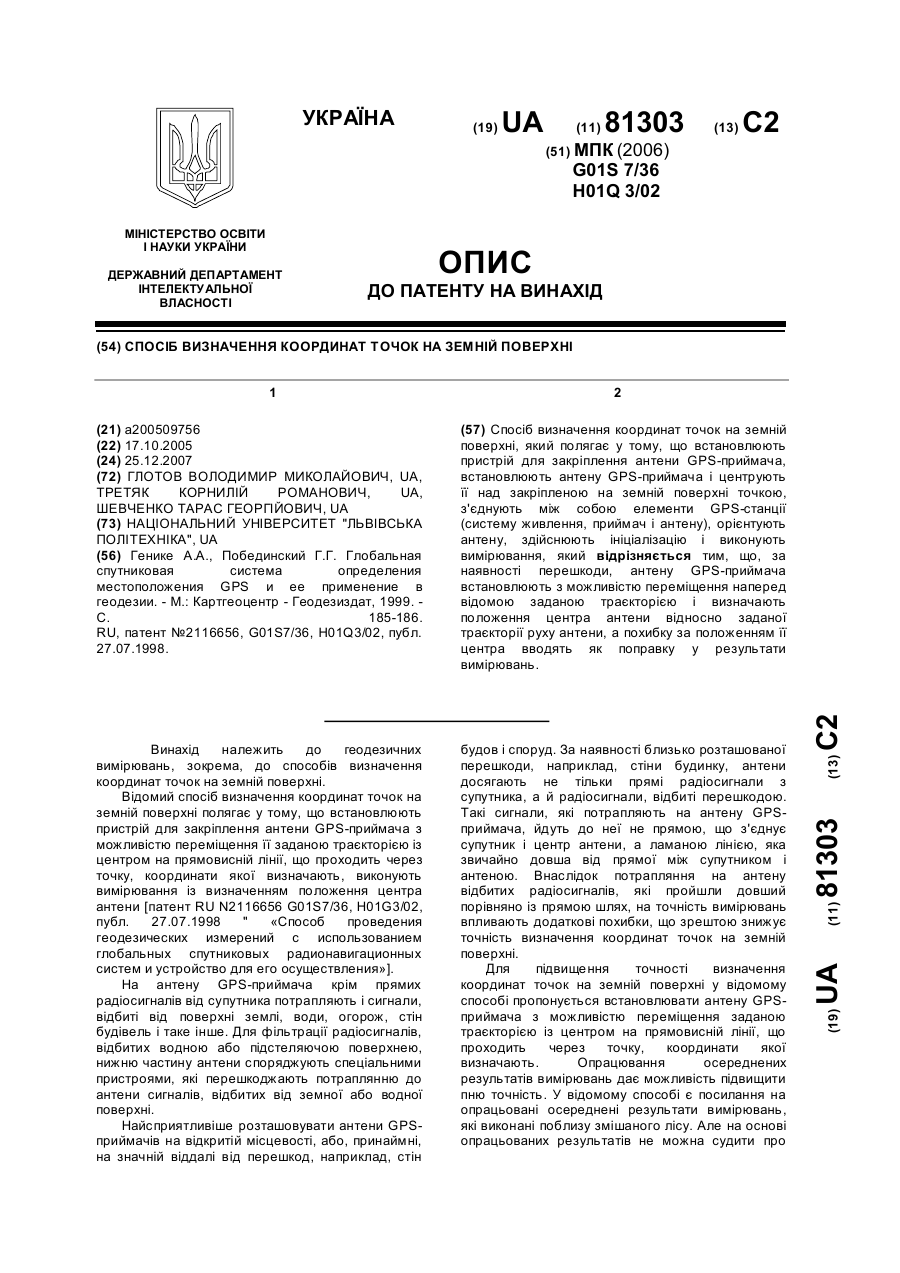
Спосіб визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції (систему живлення, приймач і антену), орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, який відрізняється тим, що, за наявності перешкоди, антену...
Попередній патент: Спосіб виготовлення композиційного матеріалу
Наступний патент: Стельова система з освітленням
Випадковий патент: Спосіб реконструкції пальового фундаменту