Спосіб визначення координат точок на земній поверхні
Номер патенту: 81303
Опубліковано: 25.12.2007
Автори: Третяк Корнилій Романович, Глотов Володимир Миколайович, Шевченко Тарас Георгійович
Формула / Реферат
Спосіб визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції (систему живлення, приймач і антену), орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, який відрізняється тим, що, за наявності перешкоди, антену GPS-приймача встановлюють з можливістю переміщення наперед відомою заданою траєкторією і визначають положення центра антени відносно заданої траєкторії руху антени, а похибку за положенням її центра вводять як поправку у результати вимірювань.
Текст
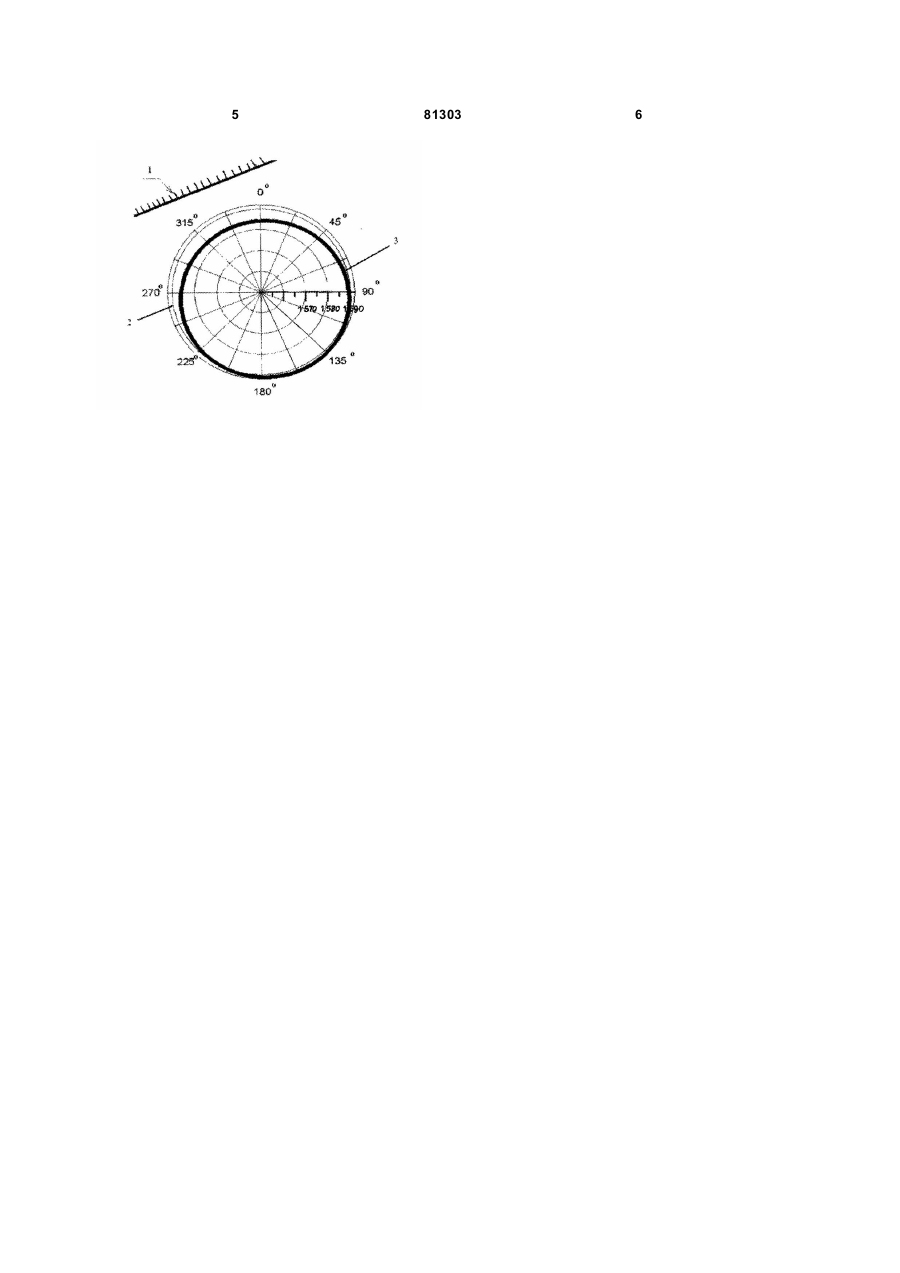
Спосіб визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції (систему живлення, приймач і антену), орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, який відрізняється тим, що, за наявності перешкоди, антену GPS-приймача встановлюють з можливістю переміщення наперед відомою заданою траєкторією і визначають положення центра антени відносно заданої траєкторії руху антени, а похибку за положенням її центра вводять як поправку у результати вимірювань. (19) (21) a200509756 (22) 17.10.2005 (24) 25.12.2007 (72) ГЛОТОВ ВОЛОДИМИР МИКОЛАЙОВИЧ, UA, ТРЕТЯК КОРНИЛІЙ РОМАНОВИЧ, UA, ШЕВЧЕНКО ТАРАС ГЕОРГІЙОВИЧ, UA (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ "ЛЬВІВСЬКА ПОЛІТЕХНІКА", UA (56) Генике А.А., Побединский Г.Г. Глобальная спутниковая система определения местоположения GPS и ее применение в геодезии. - М.: Картгеоцентр - Геодезиздат, 1999. С. 185-186. RU, патент №2116656, G01S7/36, H01Q3/02, публ. 27.07.1998. 3 безпосередній вплив перешкоди лісу на результати вимірювань. В основу винаходу поставлене завдання вдосконалити спосіб визначення координат точок на земній поверхні, у якому визначення положення центра антени за прийнятим сигналом відносно заданої їй траєкторії руху, та введення похибки за положення п центра як поправки в результати вимірювань дали би можливість визначити похибку яка викликана наявністю конкретної перешкоди за рахунок відбитою перешкодою сигналу, й підвищити точність вимірювань. В основу винаходу поставлене завдання вдосконалити спосіб визначення координат точок на земній поверхні, в якому антену GPS-приймача, встановлену поблизу перешкоди, переміщують наперед відомою заданою траєкторією, визначають положення центру антени відносно заданої траєкторії руху антени, що дало б можливість визначити похибку, яка викликана наявністю перешкоди за рахунок відбитого перешкодою сигналу. Та підвищити точність вимірювань. Поставлене завдання вирішують тим, що у способі визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції, а саме: систему живлення, приймач і антену, орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, згідно з винаходом, за наявності перешкоди антену GPS-приймача встановлюють з можливістю переміщення наперед відомою заданою траєкторією і визначають положення центру антени відносно заданої траєкторії руху антени, а похибку за положення її центра вводять як поправку у результати вимірювань. Визначення відхилень положення центру розміщеної поблизу перешкоди рухомої антени відносно наперед відомої заданої траєкторії руху її дозволяє визначити похибку у виміряних координатах точок внаслідок дії сигналу, відбитого перешкодою, що дає можливість підвищити точність вимірювань, зокрема виконувати прецизійні вимірювання. Спосіб визначення координат точок на земній поверхні здійснюють таким чином. Поблизу перешкоди, наприклад, стіни встановлюють пристрій для закріплення антени GPS-приймача. Такий пристрій, наприклад, рухомий важіль із місцем для закріплення антени, який, рухаючись, може переміщувати антену заданою коловою траєкторією із центром на прямовисній лінії, що проходить через точку, координати якої визначають. Антену на важелі центрують примусово, а відхилення центра антени від заданої, наприклад, колової траєкторії не повинно перебільшувати 03мм. Орієнтують антену, встановивши її так, щоб на північ була спрямована мітка на боці антени. Здійснюють ініціалізацію, тобто фіксацію наявного сузір'я супутників і кількості їх, захоплених приймачем. Про 81303 4 закінчення ініціалізації інформують покази дисплея. Виконують вимірювання згідно інструкцій і рекомендацій із визначення центра положення антени. Як показано на фіг., антені була задана траєкторія руху радіусом 1588мм ,один оберт за 4сек/часу. На фіг. показано тільки радіуси від 1570мм до 1590мм. На фіг. позначено: 1відбиваюча поверхня; 2-колова траєкторія руху центра антени; З - траєкторія руху центра антени за прийнятим сигналом, визначена за результатами вимірювань відносно заданої траєкторії руху. Градусні позначки відповідають положенням радіус - вектора руху центра антени. Найменша віддаль між центром антени і відбиваючою поверхнею становила 2,0м. Ініціалізація виконувалась у статичному положенні протягом 10хв часу. Частота фіксації епох - 1сек часу. Тривалість вимірювань становила 30хв часу. У результаті вимірювань було визначено 2000 положень центра антени рівномірно рознесених відносно заданої траєкторії. Визначали положення центра антени за прийнятим сигналом відносно заданої траєкторії руху, для чого впорядкували за азимутом довжини визначених радіус-векторів руху центра антени. Для визначення траєкторії руху центра антени за результатами вимірювань довжини радіус-векторів R у залежності від їх азимутів, було апроксимоване рядом Фур'є, обмежившись першими гармоніками R=Rx,+a*cos(a) = b*sai(a) (1) де R0 - середній радіус - вектор центра антени GPS-приймача; а,b - коефіцієнти гармоніки; αазимут радіус-вектора. У результаті апроксимації за способом найменших квадратів залежність (1) набула вигляду R = 1 5876 - 0,0036 cos(a) + 0,00184 sin( a), (2) , Мінімум функції (2) відповідає азимуту 332°, що збігається з нормаллю до відбиваючої поверхні. Дійсна траєкторія руху центра антени, визначена за результатами вимірювань, як показано на фіг., зазнає максимального спотворення відносно заданої ш траєкторії руху під час наближення антени до відбиваючої поверхні. Ця траєкторія практично збігається з наперед відомою лляною коловою траєкторією в найбільш віддаленому азимутальному секторі 90210°. Максимальне зменшення радіус-вектора положення центра антени GPS-приймача, визначене за результатами вимірювань, складає 6 мм. Похибку за положення її центра вводять як поправку в результати вимірювань. Вплив додатково відбитих сигналів на точність визначення координат точок на земній поверхні має систематичний характер. Введення поправок підвищує точність вимірювань. 5 81303 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the coordinates of an object on the earth surface
Автори англійськоюHlotov Volodymyr Mykolaiovych, Tretiak Kornyliy Romanovych, Shevchenko Taras Heorhiiovych
Назва патенту російськоюСпособ определения координат объекта на земной поверхности
Автори російськоюГлотов Владимир Николаевич, Третьяк Корнилий Романович, Шевченко Тарас Георгиевич
МПК / Мітки
Мітки: поверхні, точок, координат, земній, спосіб, визначення
Код посилання
<a href="https://ua.patents.su/3-81303-sposib-viznachennya-koordinat-tochok-na-zemnijj-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат точок на земній поверхні</a>
Спосіб визначення планових координат точок на земній поверхні
Номер патенту: 64097
Опубліковано: 15.03.2005
Автори: Шевченко Тарас Георгійович, Романишин Ігор Богданович, Голубінка Юрій Ігорович, Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: визначення, планових, координат, точок, спосіб, земній, поверхні
Формула / Реферат:
1. Спосіб обеззаражування овочів, фруктів та ягід в якому, почергово, спочатку ведуть промивання овочів, фруктів та ягід у негативно електроактивованій воді (католіті) з окислювально-відновлювальним потенціалом (-480) мВ, потім ведуть замочування овочів. фруктів та ягід у позитивно електроактивованій воді (аноліті) з окислювально-відновлювальним потенціалом (+1140) мВ, який відрізняється тим, що промивання овочів, фруктів та ягід ведуть у...
Спосіб визначення положення точок на земній поверхні
Номер патенту: 42431
Опубліковано: 15.10.2001
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: спосіб, визначення, земній, положення, поверхні, точок
Формула / Реферат:
Cпociб визначення положення точок на земній поверхні, який заключається у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, обчислюють кількість сесій вимірів, розташовують одночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри i визначають положення точок на земній поверхні, який відрізняється тим, що після позначення на місцевості...
Спосіб визначення положення точок на земній поверхні
Номер патенту: 60573
Опубліковано: 15.10.2003
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: земній, поверхні, положення, точок, спосіб, визначення
Формула / Реферат:
Спосіб визначення положення точок на земній поверхні, який полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, встановлюють у кожній з них одну систему GPS, визначають нею наближені координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності,...
Прилад для визначення координат постановників завад, працюючих на земній поверхні
Номер патенту: 61209
Опубліковано: 17.11.2003
Автори: Куровська Тетяна Юріївна, Зайківський Олександр Болеславович, Шпаківський Юрій Олександрович, Микитюк Олександр Григорович, Слепов Лев Іванович
Мітки: визначення, завад, поверхні, постановників, працюючих, прилад, координат, земній
Формула / Реферат:
Прилад для визначення координат постановників завад, які працюють на земній поверхні, що містить антенну систему, вхідний контур, підсилювач високої частоти, детектор, підсилювач низької частоти і динамік, який відрізняється тим, що він додатково містить канал виміру дальності, який має випрямляч інформаційного сигналу, прилад лінеаризації залежності комутатор чутливості...
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Михайловський Юрій Броніславович, Славінська Алла Людвігівна, Мица Вікторія Василівна
МПК: A41H 1/00
Мітки: визначення, спосіб, координат, манекена, поверхні, точок
Формула / Реферат:
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Попередній патент: Горілка особлива “поліська”
Наступний патент: Композиція кладрибіну (варіанти), спосіб її одержання, кладрибін-циклодекстриновий комплекс та його застосування
Випадковий патент: Спосіб діагностики розвитку остеопорозу