Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта
Номер патенту: 32140
Опубліковано: 12.05.2008
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
Формула / Реферат
Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об'єкта, що містить блок опромінення поверхні об'єкта і блок реєстрації зображення опроміненої поверхні, який відрізняється тим, що блок опромінення поверхні об'єкта виконаний з можливістю опромінення поверхні об'єкта системою паралельних ліній, розташованих у світловій чи несвітловій області електромагнітного спектра випромінювань, блок реєстрації зображення опроміненої поверхні у застосованій блоком опромінення поверхні об'єкта області електромагнітного спектра розташований зі зміщенням відносно блока опромінення поверхні об'єкта в напрямку, перпендикулярному до проектованих ліній, і виконаний з можливістю передачі даних про отримане зображення до блока ЕОМ для обробки цієї інформації і розрахунку координат точок поверхні за відомими геометричними характеристиками пристрою.
Текст
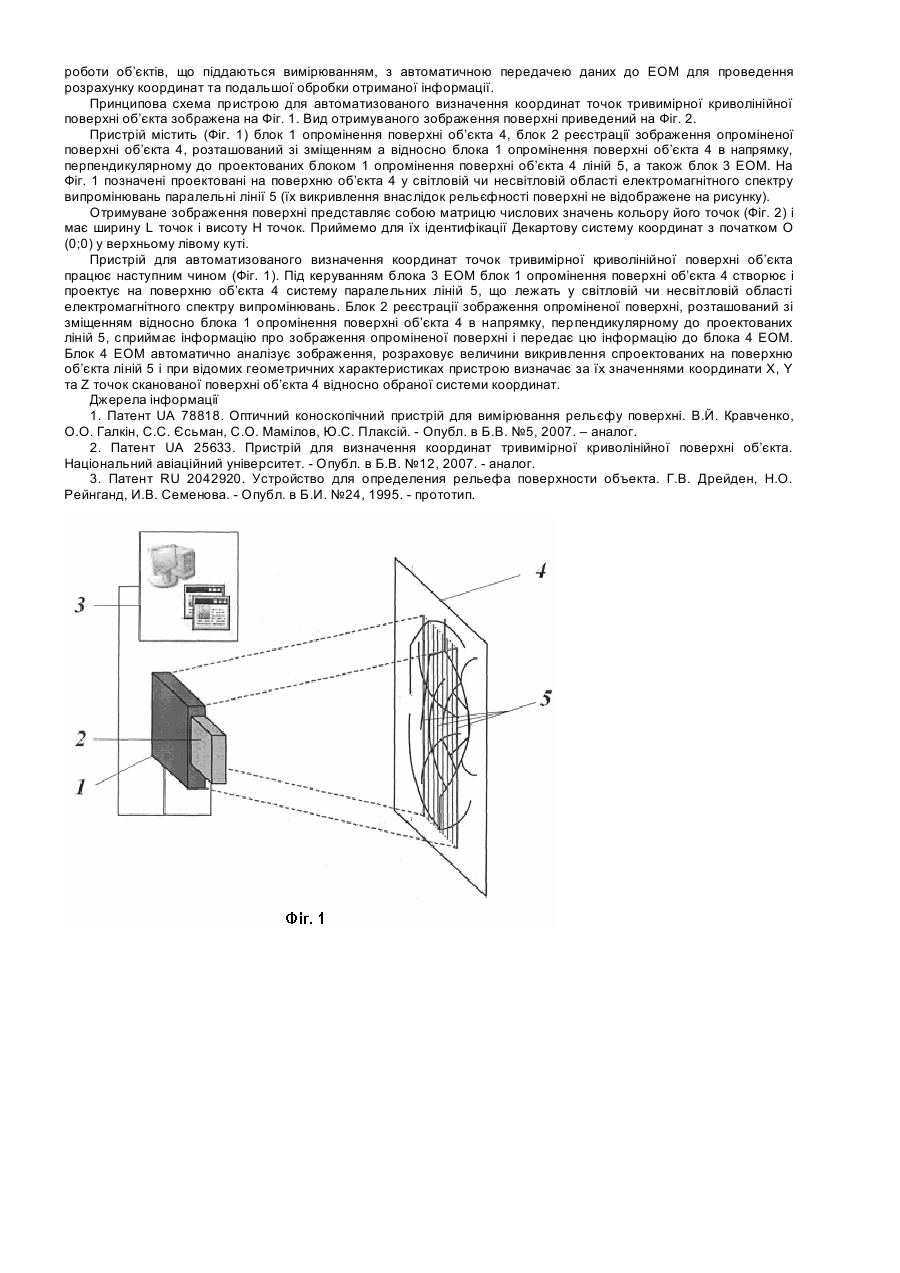
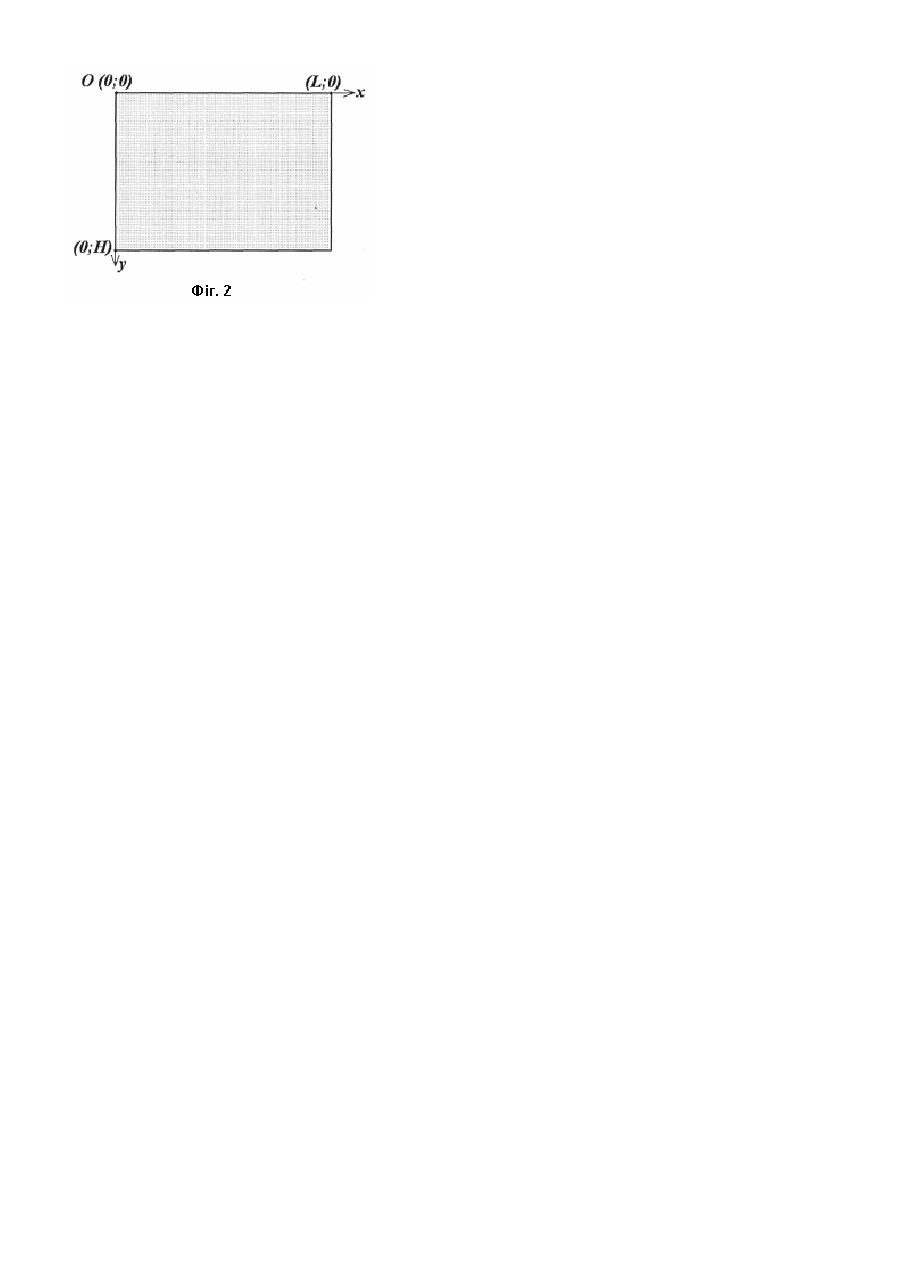
Корисна модель належить до галузі вимірювальної техніки і може застосовуватись для діагностування деформаційних пошкоджень поверхонь об’єктів, наприклад, транспортних засобів, таких як літаки, автомобілі, катера та яхти, або їх конструктивних елементів, таких як тягнучі чи штовхаючі гвинти, лопатки турбін чи компресорів, рульових чи кермових поверхонь, поверхонь підводних крил, обтічників, блістерів тощо в реальних експлуатаційних умовах, а також для визначення геометричних параметрів деформованих і недеформованих криволінійних поверхонь в лабораторних умовах для проведення досліджень деформаційного впливу на об’єкти чи матеріали. Відомі пристрої для визначення двовимірних криволінійних профілів та тривимірних криволінійних поверхонь. Прикладом такого пристрою є пристрій для вимірювання координат точок поверхні виробів, що містить освітлювач з монохроматичним джерелом випромінювання, двозаломний кристал, розміщений між двома круговими поляризаторами, фотоприймач типу ПЗЗ камери і процесор. До таких пристроїв також належить пристрій, що містить вимірювальний накінечник для здійснення контакту зі сканованою поверхнею, циліндричний напрямний стрижень з рухомим відносно нього повзуном, жорстко з’єднаним з вимірювальним накінечником, розташовані безпосередньо на повзуні датчики обертального і прямолінійного переміщення повзуна відносно циліндричної поверхні напрямного стрижня, вузол кріплення пристрою на сканованій поверхні. Недоліком цих пристроїв є те, що всі вони розраховані на процес контактного або безконтактного сканування поверхні, що має певну протяжність в часі, яка зумовлюється необхідністю послідовного дослідження різних її точок шляхом зміни розташування сканую чого елементу або ж самої поверхні. При збільшенні тривалості процесу сканування зростає вірогідність появи додаткових похибок визначення координат із-за вібрацій, знижується зручність роботи з пристроєм, оперативність проведення вимірювань. Наявність в пристроях кінематичних з’єднань сприяє появі похибок вимірювань внаслідок зношування деталей, початкових люфтів [1, 2]. Також відомий вибраний за прототип пристрій для визначення рельєфу поверхні об’єкта, що містить блок освітлення поверхні об’єкта, який має можливість формувати лінійку рівновіддалено розташованих світлових п’ятен, і рухомий блок реєстрації зображення освітленої поверхні з світлочутливим елементом, вузол обертання об’єкта. В якості блока освітлення поверхні може використовуватись серія світлодіодів, або послідовно встановлені лазер, інтерферометр і щільова діафрагма, або послідовно встановлені лазер і дифракційна решітка. В якості світлочутливого елементу блока реєстрації зображення освітленої поверхні може використовуватись світлочутлива плівка або ПЗС-матриця. Визначення координат точок поверхні здійснюється після розрахунку зареєстрованого блоком реєстрації зображення освітленої поверхні зміщення положень світлових п’ятен внаслідок рельєфності поверхні. При цьому фактично вимірюваною величиною є не абсолютний, а відносний рельєф, тобто виміряний відносно певної опорної точки з початково відомою висотою рельєфа. Недоліком пристрою є наявність рухомих елементів, протяжний у часі процес сканування, необхідність спеціально окремо не за допомогою пристрою визначати висоту рельєфу опорної точки, неможливість визначати рельєф великих стаціонарних об’єктів, таким чином, використовувати прилад в реальних експлуатаційних умовах аеродромів, станцій технічного обслуговування, місць розслідування дорожньо-транспортних пригод, у випадках проведення оціночних експрес-вимірів на місцях роботи об’єктів, що піддаються вимірюванням [3]. В основу корисної моделі поставлено задачу скорочення часу проведення вимірювань, підвищення їх точності, а також розширення функціональних можливостей пристрою для визначення рельєфу поверхні об’єкта, шляхом застосування принципу визначення координат точок поверхні об’єкта по викривленню одноразово спроектованої на поверхню об’єкта системи паралельних ліній, забезпечити автономність пристрою, тобто можливість визначення координат поверхонь виключно засобами самого пристрою без проведення додаткових вимірювань положення опорної точки чи опорних точок, нечутливість конструкції до коливань температури, звукових коливань, вітру, вібрації в умовах проведення вимірювань, можливості роботи з пристроєм, закріпленим у нахиленому чи перевернутому положенні. Покладена задача вирішується тим, що пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта, що містить блок опромінення поверхні об’єкта і блок реєстрації зображення опроміненої поверхні, згідно з винаходом здійснює опромінення поверхні об’єкта системою паралельних ліній, розташованих у світловій чи несвітловій області електромагнітного спектру випромінювань, а блок реєстрації зображення опроміненої поверхні у застосованій блоком опромінення поверхні об’єкта області електромагнітного спектру розташований зі зміщенням відносно блока опромінення поверхні об’єкта в напрямку, перпендикулярному до проектованих ліній, і виконаний з можливістю передачі даних про отримане зображення через стандартний дротовий роз’єм або бездротовим зв’язком до блока ЕОМ для обробки цієї інформації і розрахунку координат точок поверхні за відомими геометричними характеристиками пристрою. При цьому вказана одноразово спроектована система паралельних ліній охоплює всю досліджувану поверхню і відпадає необхідність повторного її опромінення. Час проведення вимірів визначається лише часом, необхідним для одноразової реєстрації зображення опроміненої поверхні. Подальша передача даних про отримане зображення до блока ЕОМ та обробка нею цієї інформації і розрахунок координат точок поверхні можуть проводитися згодом, відокремлено від процесу проведення вимірів. В якості блока опромінення поверхні може використовуватись система, що включає послідовно встановлені лазер і дифракційну решітку. В якості світлочутливого елементу блока реєстрації зображення опроміненої поверхні може використовуватись чутлива до електромагнітного випромінювання застосовуваної довжини хвилі електронна матриця. Точність визначення координат поверхні зростає при зменшенні відстаней між паралельними лініями, проектованими на поверхню, та їх товщини, підвищенні роздільної здатності та якості сприйняття зображення блоком реєстрації зображення опроміненої поверхні, зменшенні відстані від пристрою до сканованого об’єкту і відповідному зменшенні сканованої області. Така конструкція дозволяє отримати універсальний легкий і швидкий у застосуванні пристрій для оперативного визначення координат тривимірних криволінійних поверхонь конструкцій, виготовлених з різних матеріалів, в реальних експлуатаційних умовах аеродромів, станцій технічного обслуговування, місць розслідування дорожньо-транспортних пригод, у випадках проведення оціночних експрес-вимірів на місцях роботи об’єктів, що піддаються вимірюванням, з автоматичною передачею даних до ЕОМ для проведення розрахунку координат та подальшої обробки отриманої інформації. Принципова схема пристрою для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта зображена на Фіг. 1. Вид отримуваного зображення поверхні приведений на Фіг. 2. Пристрій містить (Фіг. 1) блок 1 опромінення поверхні об’єкта 4, блок 2 реєстрації зображення опроміненої поверхні об’єкта 4, розташований зі зміщенням а відносно блока 1 опромінення поверхні об’єкта 4 в напрямку, перпендикулярному до проектованих блоком 1 опромінення поверхні об’єкта 4 ліній 5, а також блок 3 ЕОМ. На Фіг. 1 позначені проектовані на поверхню об’єкта 4 у світловій чи несвітловій області електромагнітного спектру випромінювань паралельні лінії 5 (їх викривлення внаслідок рельєфності поверхні не відображене на рисунку). Отримуване зображення поверхні представляє собою матрицю числових значень кольору його точок (Фіг. 2) і має ширину L точок і висоту Н точок. Приймемо для їх ідентифікації Декартову систему координат з початком О (0;0) у верхньому лівому куті. Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта працює наступним чином (Фіг. 1). Під керуванням блока 3 ЕОМ блок 1 опромінення поверхні об’єкта 4 створює і проектує на поверхню об’єкта 4 систему паралельних ліній 5, що лежать у світловій чи несвітловій області електромагнітного спектру випромінювань. Блок 2 реєстрації зображення опроміненої поверхні, розташований зі зміщенням відносно блока 1 опромінення поверхні об’єкта 4 в напрямку, перпендикулярному до проектованих ліній 5, сприймає інформацію про зображення опроміненої поверхні і передає цю інформацію до блока 4 ЕОМ. Блок 4 ЕОМ автоматично аналізує зображення, розраховує величини викривлення спроектованих на поверхню об’єкта ліній 5 і при відомих геометричних характеристиках пристрою визначає за їх значеннями координати X, Y та Z точок сканованої поверхні об’єкта 4 відносно обраної системи координат. Джерела інформації 1. Патент UA 78818. Оптичний коноскопічний пристрій для вимірювання рельєфу поверхні. В.Й. Кравченко, О.О. Галкін, С.С. Єсьман, С.О. Мамілов, Ю.С. Плаксій. - Опубл. в Б.В. №5, 2007. – аналог. 2. Патент UA 25633. Пристрій для визначення координат тривимірної криволінійної поверхні об’єкта. Національний авіаційний університет. - Опубл. в Б.В. №12, 2007. - аналог. 3. Патент RU 2042920. Устройство для определения рельефа поверхности объекта. Г.В. Дрейден, Н.О. Рейнганд, И.В. Семенова. - Опубл. в Б.И. №24, 1995. - прототип.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated determination of coordinates of points of three-dimensional curvilinear surface of object
Автори англійськоюAstanin Viacheslav Valentynovych, Olefir Hanna Oleksiivna
Назва патенту російськоюУстройство для автоматизированного определения координат точек трехмерной криволинейной поверхности объекта
Автори російськоюАстанин Вячеслав Валентинович, Олефир Анна Алексеевна
МПК / Мітки
МПК: G01B 15/02
Мітки: автоматизованого, координат, криволінійної, об'єкта, точок, пристрій, визначення, поверхні, тривимірної
Код посилання
<a href="https://ua.patents.su/3-32140-pristrijj-dlya-avtomatizovanogo-viznachennya-koordinat-tochok-trivimirno-krivolinijjno-poverkhni-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматизованого визначення координат точок тривимірної криволінійної поверхні об’єкта</a>
Пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об’єкта
Номер патенту: 31774
Опубліковано: 25.04.2008
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
МПК: G01B 5/30
Мітки: криволінійної, визначення, об'єкта, автоматизованого, координат, тривимірної, поверхні, пристрій
Формула / Реферат:
Пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для контакту зі сканованою поверхнею, циліндричний напрямний стрижень з рухомим відносно нього повзуном, датчик переміщення повзуна відносно поверхні напрямного стрижня, розташований безпосередньо на повзуні, і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що датчик переміщення повзуна...
Пристрій для визначення координат тривимірної криволінійної поверхні об`єкта
Номер патенту: 25633
Опубліковано: 10.08.2007
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
МПК: G01B 5/30
Мітки: криволінійної, поверхні, координат, пристрій, об'єкта, тривимірної, визначення
Формула / Реферат:
Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що напрямний стрижень виконаний циліндричним і забезпечений засобами кріплення безпосередньо на вимірюваній ділянці поверхні, а жорстко з'єднаний з...
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Мица Вікторія Василівна, Михайловський Юрій Броніславович, Славінська Алла Людвігівна
МПК: A41H 1/00
Мітки: спосіб, поверхні, визначення, точок, манекена, координат
Формула / Реферат:
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Спосіб визначення координат точок на земній поверхні
Номер патенту: 81303
Опубліковано: 25.12.2007
Автори: Шевченко Тарас Георгійович, Глотов Володимир Миколайович, Третяк Корнилій Романович
Мітки: координат, визначення, спосіб, точок, земній, поверхні
Формула / Реферат:
Спосіб визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції (систему живлення, приймач і антену), орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, який відрізняється тим, що, за наявності перешкоди, антену...
Спосіб визначення планових координат точок на земній поверхні
Номер патенту: 64097
Опубліковано: 15.03.2005
Автори: Шевченко Тарас Георгійович, Третяк Корнилій Романович, Романишин Ігор Богданович, Голубінка Юрій Ігорович
МПК: G01C 5/00
Мітки: спосіб, поверхні, координат, земній, визначення, планових, точок
Формула / Реферат:
1. Спосіб обеззаражування овочів, фруктів та ягід в якому, почергово, спочатку ведуть промивання овочів, фруктів та ягід у негативно електроактивованій воді (католіті) з окислювально-відновлювальним потенціалом (-480) мВ, потім ведуть замочування овочів. фруктів та ягід у позитивно електроактивованій воді (аноліті) з окислювально-відновлювальним потенціалом (+1140) мВ, який відрізняється тим, що промивання овочів, фруктів та ягід ведуть у...
Попередній патент: Спосіб визначення ступеня ураження приміщень мікроскопічними грибами
Наступний патент: Спосіб виготовлення взуття
Випадковий патент: Спрямований відгалужувач