Поляриметричний вимірювач рівності та ухилів поверхні аеродромного покриття
Номер патенту: 109251
Опубліковано: 25.08.2016
Автори: Тронько Володимир Дмитрович, Клочан Арсен Євгенійович, Романенко Віктор Григорович, Скрипець Андрій Васильович


Формула / Реферат
Поляриметричний вимірювач оцінки рівності та ухилів поверхні аеродромного покриття, що складається з рухомої платформи, блока управління, приймального пристрою випромінення лазерної указки, джерела світла, напівпрозорого дзеркала, поляризатора повздовжнього каналу, дзеркала, поляризатора поперечного каналу, приймача супутникової навігаційної системи, радіопередавального пристрою, вимірювального колеса, інкрементного датчика, розсіювальної лінзи, звукового генератора, комірки Фарадея, аналізатора поперечного каналу, діелектричної пластини, аналізатора повздовжнього каналу, фотоприймача, підсилювача, синхронного детектора, радіоприймача, мікроконтролера, рідиннокристалічного дисплея кристалічного дисплея, блока пам'яті, лазерного дальноміра, комп'ютера, нерухомої платформи, лазерної указки, який відрізняється тим, що кути нівелювання, за допомогою яких описують мікрорельєф штучного покриття, визначаються за допомогою кутів, що відповідають азимуту площини поляризації поляризованого світла.
Текст
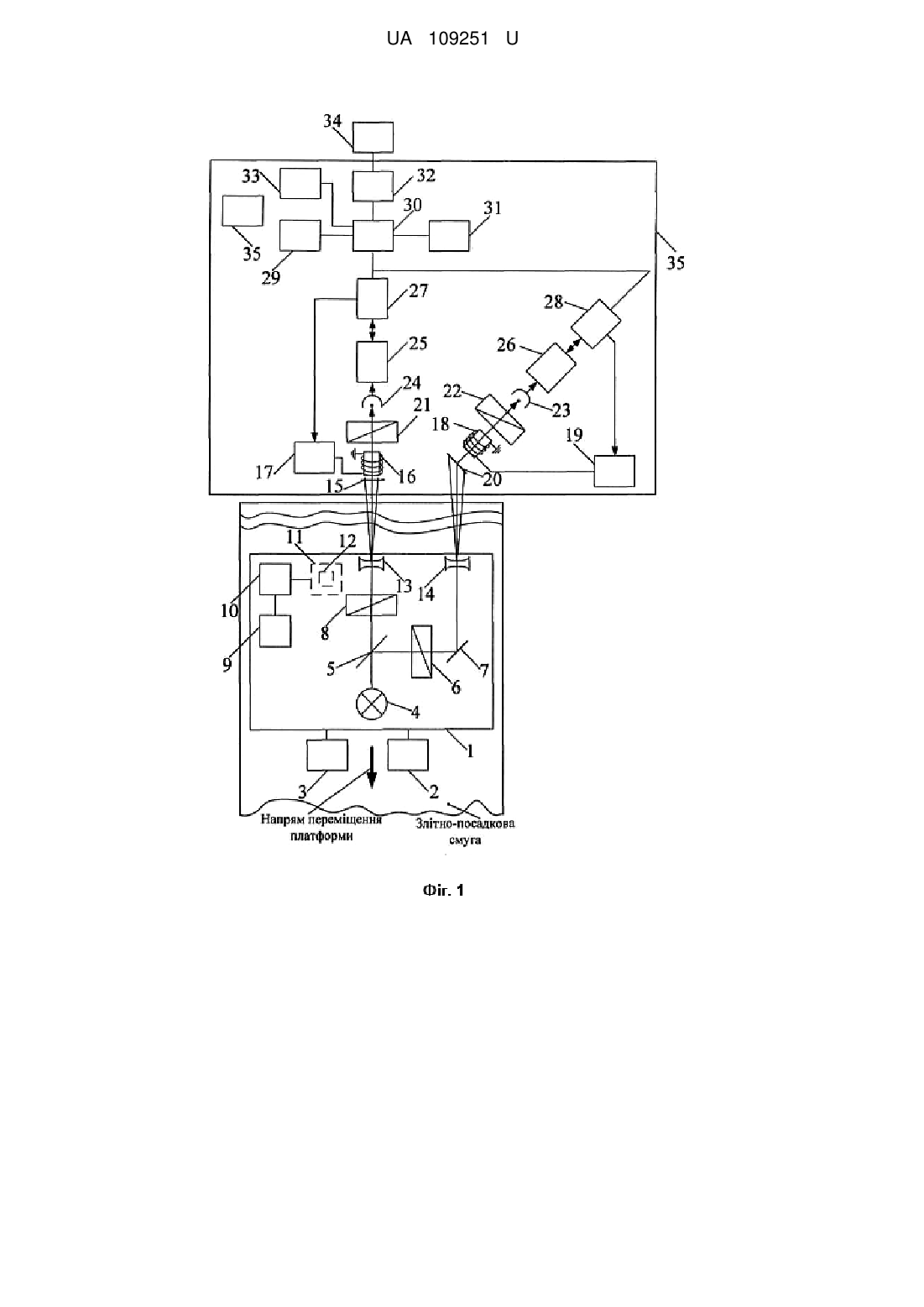
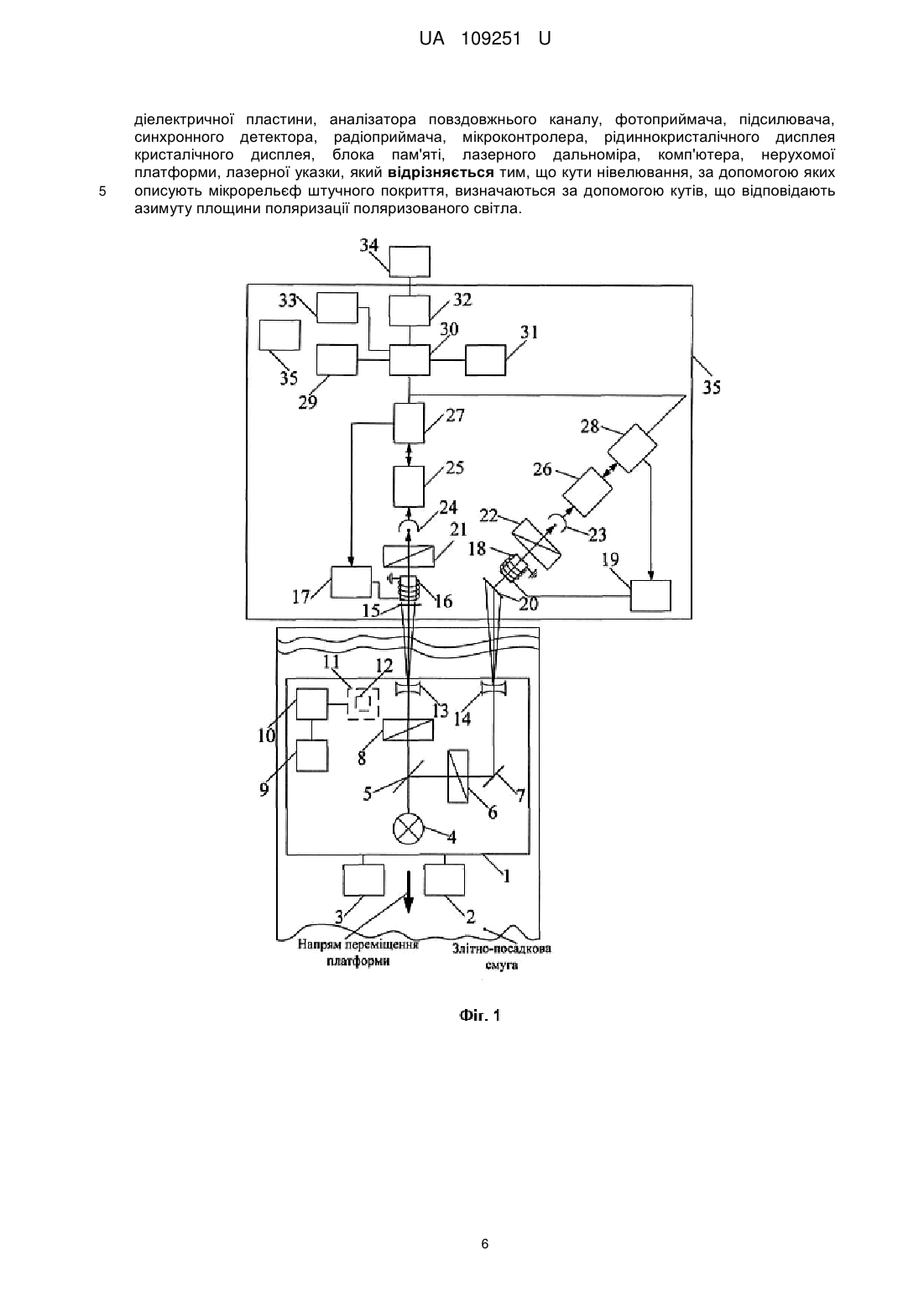
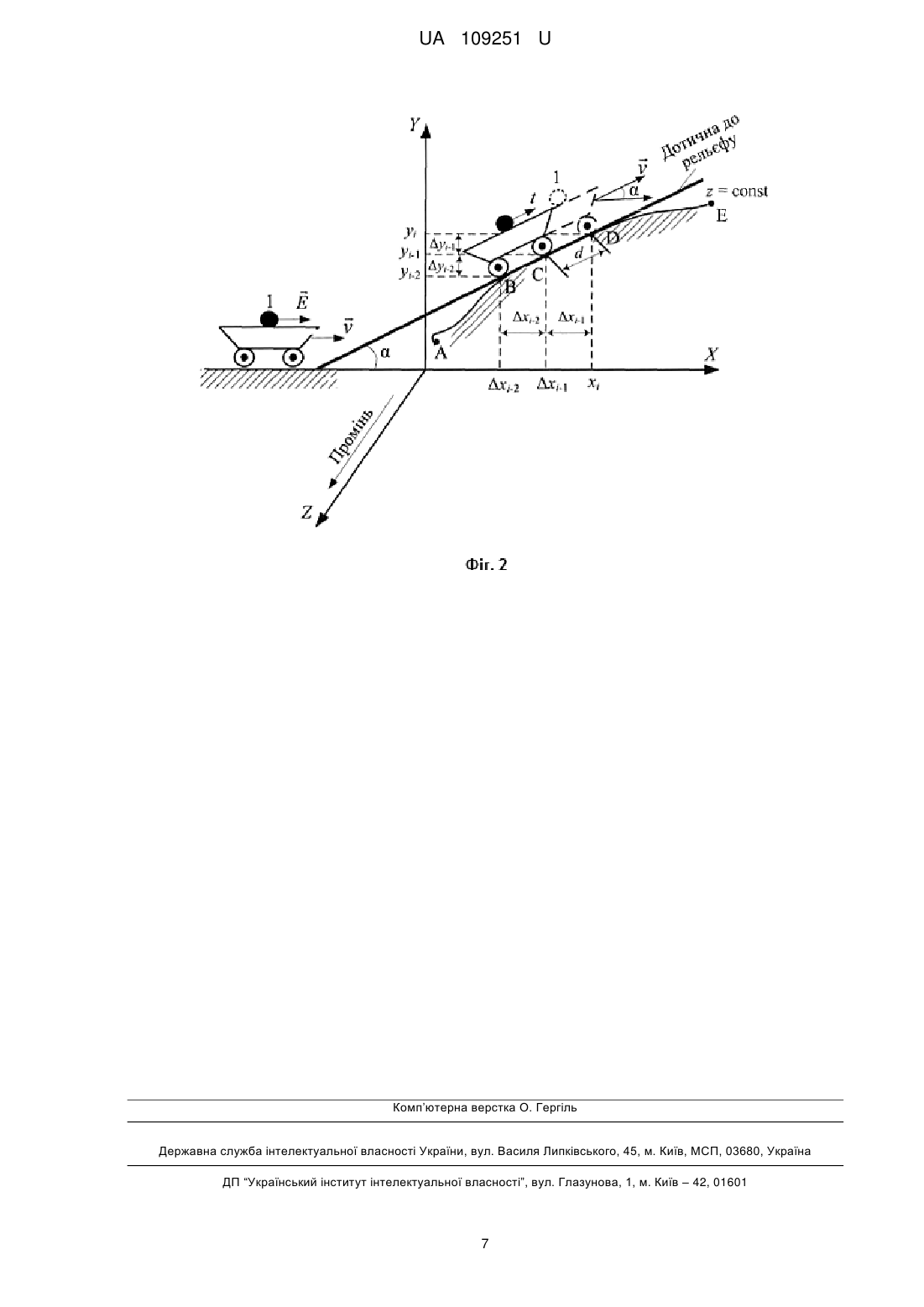
Реферат: Поляриметричний вимірювач оцінки рівності та ухилів поверхні аеродромного покриття складається з рухомої платформи, блока управління, приймального пристрою випромінення лазерної указки, джерела світла, напівпрозорого дзеркала, поляризатора повздовжнього каналу, дзеркала, поляризатора поперечного каналу, приймача супутникової навігаційної системи, радіопередавального пристрою, вимірювального колеса, інкрементного датчика, розсіювальної лінзи, звукового генератора, комірки Фарадея, аналізатора поперечного каналу, діелектричної пластини, аналізатора повздовжнього каналу, фотоприймача, підсилювача, синхронного детектора, радіоприймача, мікроконтролера, рідиннокристалічного дисплея кристалічного дисплея, блока пам'яті, лазерного дальноміра, комп'ютера, нерухомої платформи, лазерної указки. Кути нівелювання, за допомогою яких описують мікрорельєф штучного покриття, визначаються за допомогою кутів, що відповідають азимуту площини поляризації поляризованого світла. UA 109251 U (12) UA 109251 U UA 109251 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований поляриметричний вимірювач належить до області геодезичного приладобудування і призначений для проведення мікронівелювання і оцінки рівності штучного покриття на аеродромах і автомобільних дорогах, вимірювальних робіт на залізничних шляхах, та при вирішенні інших задач не тільки як вимірювач, але і як індикаторний пристрій. При оцінці рівності та ухилів поверхні аеродромного покриття використовують ті ж самі геодезичні прилади, що і для визначення рельєфу місцевості, а саме: теодоліти, нівеліри, світлодальноміри, тахеометри та інші. Характерною ознакою для більшості із них являється висока точність, але разом з тим швидкість забезпечуваного ними вимірювального процесу мала. Значними також є і трудовитрати при виконанні вимірювальних робіт, незважаючи на автоматизацію їх операцій. Невисока швидкість вимірювального процесу наземних геодезичних приладів обумовлена особливостями їх методик вимірювання. Зокрема, потрібен час для того, щоб виставити їх у відповідності до горизонтальної і вертикальної площин; в ході вимірювальних робіт при визначенні координат довільної геометричної точки рельєфу спочатку необхідно сфокусувати її зображення, а потім проводити вимірювання щодо еталонних напрямків за допомогою рівнів або гіроскопів чи акселерометрів. А для цього потрібен певний час. Головними технологічними складовими при проведенні геодезичних вимірювальних робіт являються операції по визначенню кута, що утворює відрізок з певними фіксованими точками відносно горизонту та визначення відстаней. Тому при геодезичних вимірюваннях використовуються не тільки вище вказані прилади, але і інші, зокрема ті, що фіксують кути ухилів та рівності поверхонь. Відомий пристрій для контролю ухилів автомобільних доріг (свідоцтво РФ на корисну модель № 12607, МКИ G01C 9/06, 20.01.2000), що містить плоску вимірювальну поверхню, на якій розташований чутливий елемент у вигляді датчика лінійних прискорень, електронна схема для обробки сигналів і засоби індикації на рідкому кристалі. Недоліками вказаного пристрою є невисока надійність та оперативність вимірювання, так як оператор повинен спочатку визначити напрям нахилу поверхні, а потім провести вимірювання. Також відомий цифровий вимірювач ухилів (патент РФ № 21663732, МКИ G01C 9/00, 21.03.2000), який має перетворювач лінійних прискорень в електричний сигнал та електронну схему перетворення сигналу, рідкокристалічний засіб індикації. Недоліками вказаного вимірювача є невисока оперативність та складність вимірювань у зв'язку з неможливістю одночасного вимірювання ухилів за двома осями. Для цього оператору необхідно змінювати положення перемикача координат, задаючи напрям вимірювань - повздовжній чи поперечний. Найбільш близьким аналогом до вимірювача, що заявляється, вибраного як прототип, є пристрій для оцінки рівності поверхні аеродромного покриття (патент РФ № 2373323, МКИ Е01С 23/07, 20.11.2009), що містить динамічний перетворювач профілю і програмно-обчислювальний комплекс. Динамічний перетворювач профілю представляє собою візок зі спеціальним зчіпним пристроєм, який буксирується за допомогою автомобіля. На візку розміщено: датчик кута нахилу - прецезійний маятниковий електролітичний інклінометр, вимірювальне колесо, мікроконтролер, приймач супутникової навігаційної системи, інкрементний датчик, пульт управління, датчик вібрації, датчик шуму, блок пам'яті, рідкокристалічний дисплей. Програмно-обчислювальний комплекс представляє собою комп'ютер з програмним забезпеченням для обробки інформації та базу даних оцінки рівності аеродромного покриття і принтер. Принцип дії прототипу наступний. При руху динамічного перетворювача профілю первинна інформація про кути нівелювання надходить з датчика кута нахилу, яким є прецезійний маятниковий електролітичний інклінометр. Значення про кут нахилу поверхні покриття відносно горизонту отримують після завершення кожного кроку мікронівелювання. Воно надходить спочатку у мікроконтролер, а потім у блок пам'яті. Для визначення кожного кроку мікронівелювання застосовують переднє вимірювальне колесо візка з вмонтованим в нього інкрементним датчиком. Інкрементний датчик формує імпульси, які відповідають куту обертання вимірювального колеса. В блок пам'яті з кожним кроком мікронівелювання надходить також інформація про місце положення динамічного перетворювача профілю на злітно-посадковій смузі у вигляді географічних координат - широти і довготи, яку отримують за допомогою приймача супутникової навігаційної системи та інформація, що надходить з датчиків вібрації і шуму, яка необхідна для орієнтовної оцінки шорсткості поверхні. За допомогою комп'ютера проводиться обробка накопиченої блоком пам'яті інформації та порівняльний аналіз стану рівності поверхні штучного аеродромного покриття, спираючись на попередньо сформовану базу даних. 1 UA 109251 U 5 10 15 20 25 30 35 40 45 50 Відмінність заявленого вимірювального пристрою від прототипу полягає у методі визначення кутів нівелювання, а саме у заявленого вимірювального пристрою - оптичний (поляриметричний), в прототипі - маятниковий електролітичний. Недоліками пристрою-прототипу є недостатня точність визначення кутів нахилу в динамічному режимі вимірювань в зв'язку з застосуванням маятникового електролітичного інклінометру та відсутність одночасного вимірювання ухилів за двома осями. В основу запропонованої розробки була поставлена задача підвищення точності геодезичних вимірювань при оцінці рівності та ухилів поверхні аеродромного покриття, що проводяться в динамічному режимі та одночасного визначення ухилів за двома осями з метою отримання алгебраїчної функції, графік якої описуватиме мікрорельєф в тривимірному просторі. Поставлена задача по забезпеченню точності вимірювань вирішується завдяки застосуванню поляриметра, та обробки результатів вимірювань, отриманих в динамічному режимі за допомогою фільтра Калмана. Забезпечення визначення ухилів за двома осями досягається завдяки наявності повздовжнього та поперечного каналів вимірювання у пристрої, що заявляється. Запропонована конструкція вимірювача забезпечує значне зменшення витрат часу на проведення вимірювальних робіт завдяки його мобільності, автономності та автоматизації процесу вимірювання. За допомогою вимірювача можна проводити експрес-моніторинг злітнопосадкової смуги на аеродромі, рельєф якої завдяки впливу експлуатаційних факторів постійно змінюється, та виконувати інші операції в будь який час доби і в незалежності від погодних умов, за виключенням зимового періоду, коли наявність снігу та льоду можуть негативно вплинути на якість проведених робіт в зв'язку з зміною рельєфу ЗПС. Поляриметричний вимірювач рівності та ухилів поверхні аеродромного покриття (Фіг. 1) складається з рухомої платформи 1, блока управління 2, приймального пристрою випромінювання лазерної указки 3, джерела світла 4, напівпрозорого дзеркала 5, поляризатора повздовжнього каналу 6, дзеркала 7, поляризатора поперечного каналу 8, приймача супутникової навігаційної системи 9, радіопередавального пристрою 10, вимірювального колеса 11, інкрементного датчика 12, розсіювальної лінзи 13, 14, звукового генератора 17, 19, комірки Фарадея 16, 18, діелектричної пластини 15, 20, аналізатора поперечного каналу 21, аналізатора повздовжнього каналу 22, фотоприймача 23, 24 підсилювача 25, 26 синхронного детектора 27, 28, радіоприймача 29, мікроконтролера 30, рідкокристалічного дисплея 31, блока пам'яті 32, лазерного дальноміра 33, комп'ютера 34, нерухомої платформи 35, лазерної указки 36. Вимірювач складається з рухомої та нерухомої частини. При переміщенні рухомої частини отримують первинну інформацію про кути ухилу та рівність поверхні аеродромного покриття за допомогою поляризованого світла, та пройдену відстань рухомою платформою 1, що визначається вимірювальним колесом 11 та лазерним дальноміром 32. Переміщення рухомої платформи 1 забезпечує автомобіль за допомогою спеціального причіпного пристрою. Він виключає вплив вібрації від автомобіля. Нерухома частина вимірювача розміщена на нерухомій платформі 34 і призначена для прийому, обробки та аналізу первинної інформації, що надходить з поперечного та повздовжнього вимірювальних каналів. Рухома частина представляє собою візок, що має платформу на якій розміщено обладнання, і троє коліс - переднє вимірювальне 11 та два задніх без датчиків. Відстань між осями коліс дорівнює величині 2L . Довжина кола, що окреслює контур кожного із коліс, як і в прототипі складає L 0,5 м. Крок мікронівелювання складає величину 0,1 . Для того, щоб L задати крок мікронівелювання використовується імпульсний (покроковий) інкрементний датчик 12, що розміщується безпосередньо на вимірювальному колесі 11. Диск інкрементного датчика 12 має спеціальні позиційні відмітки. Кількість відміток визначає кількість імпульсів за один оберт колеса. За допомогою радіопередавального пристрою 10 та радіоприймача 28 інформація щодо кількості імпульсів передається на мікроконтролер 29. В ньому виконується перерахунок імпульсів з урахуванням довжини кола, що окреслює контур вимірювального колеса 11. Результати вимірювання записуються в блок пам'яті 31 у відповідності до кожного з кроків мікронівелювання. Кількість імпульсів п, необхідних для формування імпульсу для запису інформації в блоці пам'яті 31 обчислюються згідно з формулою: 0,1LN , C де 0,1 - заданий крок мікронівелювання поверхні, м; L N - кількість імпульсів за один оберт інкрементного датчика 12; n 55 C - довжина колеса по колу, м. Чутливим елементом при мікронівелюванні злітно-посадкової смуги служить поляризатор поперечного 8 та повздовжнього 6 каналів. Так як вони жорстко прикріплені до поверхні рухомої 2 UA 109251 U 5 10 15 20 25 платформи 1, то при руху вимірювача в будь-який момент часу приймають таке ж саме положення відносно горизонту як і платформа 1. Разом зі зміною положення поляризатора 6, 8 змінюється і азимутальний кут положення площини поляризації світлової хвилі в поперечному та повздовжньому каналах. Випромінювання джерела світла 4 розподіляється по каналам за допомогою напівпрозорого дзеркала 5. З метою підвищення експлуатаційної технологічності вимірювальної установки в кожному із каналів розміщено розсіювальну лінзу 13, 14. Поляризований промінь з досить малим кутом розходження утворює світловий потік у вигляді конуса, площа основи якого істотно перевищує площу поперечного перерізу діелектричних пластин 15, 20. Для забезпечення прямолінійності переміщення рухомої платформи 1 та для підтримки постійного покриття світловим променем, який розходиться, світлосприймаючих пристроїв (15, 20), що розміщені на нерухомій платформі 35, застосовують лазерну указку 36 та приймальний пристрій для фіксації її випромінювання 3. За допомогою лазерної указки 36 задають напрям слідування рухомої платформи 1. Точність дотримування заданого напрямку платформою 1 відслідковують за допомогою приймального пристрою випромінювання лазерної указки 3, який розміщено на автомобілі. У повздовжньому вимірювальному каналі для визначення азимута площини поляризації застосовують діелектричну пластину 20. Це обумовлено наявністю дзеркала 7, що відбиває світловий потік на кут 90°. Разом з ним на такий же самий кут повертається і площина поляризації відбитого дзеркалом світла. Дзеркало 7, як і поляризатор 6, жорстко прикріплено до основи рухомої платформи 1, змінює кут нахилу при її переміщенні. Завдяки цьому поляризоване світло, відбите дзеркалом 7, падатиме на діелектричну пластину 20 під кутами, значення яких залежатиме від кутів, що визначатимуть просторове положення платформи 1 при її переміщенні. У поперечному вимірювальному каналі для визначення азимута площини поляризації застосовують діелектричну пластину 15. Поляризоване світло безпосередньо падає на діелектричну пластину 15. Поляризоване світло, яке пройшло через діелектричні пластини 15, 20, також буде поляризованим, але з іншим кутом площини поляризації. Нове просторове положення площини поляризації за діелектричними пластинами 15, 20 будуть визначати величини p та s компонентів вектора напруженості 30 35 40 45 50 55 електричного поля E світлової хвилі. Величини цих компонент, а отже і положення вектора E , залежить від кута падіння світлового потоку на діелектричні пластини 15, 20. Комірки Фарадея 16, 18 забезпечують модуляцію поляризованого світла в змінному магнітному полі. Формування управляючих сигналів, що подаються на комірки Фарадея 16, 18, здійснюється звуковими генераторами 17, 19. За допомогою аналізаторів 21, 22 визначають азимут площини поляризації світла. Він являється головною інформативною величиною при мікронівелюванні поверхні аеродромного покриття. Перетворення світла в електричний сигнал проводиться за допомогою фотоприймачів 23, 24. Після цього електричний сигнал підсилюється вузькосмуговими підсилювачами 25, 26 та подається на синхронні детектори 27, 28 для підвищення чутливості, а потім через аналогово-цифровий перетворювач на мікроконтролер 30. За допомогою мікроконтролера 30 проводиться за алгоритмом фільтра Калмана первинна обробка результатів вимірювань, отриманих в динамічному режимі в поперечному та повздовжньому каналах. Після обробки сигналів мікроконтролером 30 інформація надходить на дисплей 31 та блок пам'яті 32. Накопичена інформація блоком пам'яті 32 обробляється за допомогою комп'ютера 34. Принцип дії поляриметричного вимірювача рівності та ухилів поверхні аеродромного покриття полягає в наступному (Фіг. 2). Джерело поляризованого світла 2, яке служить як датчик визначення кутів нахилу поверхні покриття, знаходиться на рухомій основі 1. На стартовому майданчику перед початком руху основи 1 відслідковують, щоб площина коливань світлового вектора E поляризованого світла по відношенню до напряму світлового променя знаходилась під кутом 90° (тобто, щоб промінь поляризованого світла був строго перпендикулярний до напрямку переміщення платформи (див. Фіг. 2)). Рухома основа 1, переміщуючись по поверхні рельєфу, приймає положення, яке відповідає куту відносно горизонту в певній фіксованій точці маршруту. Завдяки тому, що джерело поляризованого світла 2 жорстко кріпиться до основи 1, площина коливань світлового вектора E поляризованого світла буде також приймати такий же самий кут, як і рухома основа. Азимут відхилення цієї площини вимірюється аналізатором поляризатора з високою точністю (від 0,0005°), яка нас задовольняє. В результаті обробки інформації щодо виміряного кута отримують значення tg . Воно дорівнює кутовому коефіцієнту k дотичної прямої та похідній функції в певній фіксованій точці кривої рельєфу, наприклад, в точці з координатами xi, yi . За результатами інтегрування tg для множини фіксованих точок, описують шлях, пройдений вимірювальним пристроєм. Крива лінія цього шляху і буде визначати рельєф. 3 UA 109251 U 5 Позначимо довжину рельєфу від точки А до точки Е через S (див. Фіг. 2), а відстань між точками дотику коліс платформи з поверхнею рельєфу (точки В, С і D) - d , швидкість переміщення платформи - . Приріст функції y по відношенню до приросту аргументу x для кожного кроку вимірювання визначають за формулою: y dy x , dx В вищезазначеній формулі похідну функції визначають через виміряний кут : tg k 10 dy dx . Поточне і-те вимірювання значень x і y при рівномірному русі рухомої основи по поверхні рельєфу дорівнює: n x x n x i ; x i 1 x i x i 1 d cos i ; i 1 n y y n y i ; y i 1 y i y i 1 d sin i . i 1 n n i 1 n i 1 n i 1 i 1 x x n x i cosi n d n d cos i d cos i ; i 1 i 1 n y y n y i d sin i d sin i . i 1 Значення z const. В нашому випадку це відстань між осьовими лініями задніх коліс візка, що становить z 2L 1 м. Залежність між значеннями y та z через поперечний кут рухомої платформи відносно горизонту визначають за допомогою формули: n n n i 1 m i 1 i 1 y y n y i zm sin i zm sin i , 15 z zm z j . j 1 20 25 30 35 40 За отриманими значенням будується залежність yn f xn, zm або y f x, z , яка описує криву поверхні рельєфу. Порядок роботи з поляриметричним вимірювачем рівності та ухилів поверхні аеродромного покриття наступний. Перед проведенням мікронівелювання здійснюються підготовчі роботи. Проводиться розмітка стартових точок на смузі, від яких буде прокладено прямолінійний маршрут для вимірювання. Вони розміщуються на краю стартового майданчика. Розмітку роблять в межах слідів, що залишились від шасі передніх і задніх опор повітряних суден на етапі їх пробігу по злітно-посадковій смузі. Це приблизно відстань 5 м в обидві сторони від осьової лінії смуги. На стартовому майданчику проводять налаштування роботи вимірювача. Перевіряється точність кроку мікронівелювання, покази поляриметричного датчика установлюються в нульове положення відносно горизонту, виставляють вимірювач так, щоб промінь поляризованого світла був строго перпендикулярний до напрямку його траєкторії переміщення. Переднє вимірювальне колесо 11 установлюють на стартову точку. За допомогою пульта управління 2 вимірювач вмикається. Відповідними вимикачами на пульті управління 2 здійснюється вмикання режимів "Запис" та "Індикатор". В режимі "Запис" проводиться накопичення первинної інформації по мікронівелюванню блоком пам'яті 32. Результати вимірювання записуються в блок пам'яті 32 у відповідності до проходження вимірювачем кожного з кроків мікронівелювання. В блок пам'яті 32 з кожним імпульсом подається така інформація: порядковий номер запису; результати повздовжнього мікронівелювання поверхні злітно-посадкової смуги вимірювання в відповідності з інформацією повздовжнього каналу; результати поперечного мікронівелювання поверхні злітно-посадкової смуги в відповідності з інформацією поперечного каналу вимірювання; географічні координати (широта і довгота) місцеположення вимірювача на злітно-посадковій смузі, які визначаються за допомогою приймача супутникової навігаційної системи 9; відстань від стартової точки до вимірювача, яка визначається дальноміром 33; дата і час проведення вимірювання, які зазначаються, згідно з інформацією, що надійшла з приймача супутникової навігаційної системи 4 UA 109251 U 5 10 15 20 9. Значення кутів нівелювання представляються з позначками "+ " та "-", що означає підйом або пониження ухилу відносно горизонту. В режимі "Індикатор" вимірювач служить як індикатор положення поверхні відносно горизонту. В цьому режимі вимірювач працює тільки тоді, коли рухома платформа 1 не переміщується. На рідиннокристалічному дисплеї 31 відображається інформація про положення вимірювача в нерухомому стані на вимірювальній поверхні: кут тангажу у відповідності з інформацією поперечного каналу вимірювання; кут крену у відповідності з інформацією повздовжнього каналу; географічні координати (широта і довгота) місцеположення вимірювача, які визначаються за допомогою приймача супутникової навігаційної системи 9; відстань від стартової точки до вимірювача, яка визначається дальноміром 33; дата і час проведення вимірювання, які зазначаються згідно інформації, що надійшла з приймача супутникової навігаційної системи 9. Значення кутів тангажу та крену представляються з позначками "+ " та "", що означає підйом або зниження ухилу відносно горизонту. Мікронівелювання здійснюється вимірювачем при його переміщенні по поверхні штучного покриття в межах, які визначаються наявністю слідів від шасі літаків на смузі. Це приблизно представляє собою відстань 5 м по обидві сторони від осьової лінії злітно-посадкової смуги. При завершенні робіт по мікронівелюванню поверхні злітно-посадкової суги блок пам'яті 32 відключають від мікроконтролера 30 і під'єднують до комп'ютера 34. В комп'ютері 34 кути нівелювання перераховуються у функцію yn f xn, zm або y f x, z , яка описує тривимірну криву поверхні рельєфу. У відповідності з "Методикою оцінки рівності штучних покриттів геодезичним методом" по спеціально розробленій програмі розраховують ухили прямих відрізків с з кроком зйомки 5, 10 і 20 м по осі Ох: y n y n 1 , c де y n 1 - відмітка початкової точки профілю поверхні, мм; ic 25 y n - відмітка точки профілю поверхні, яка відстає від початкової на крок зйомки, мм; c - відрізок з зазначеним кроком зйомки, м. Визначається різниця суміжних ухилів прямих відрізків: i5,10,20 in15,10,20 in 5,10,20 , 30 35 40 45 де in15,10,20 та in 5,10,20 - ухили попереднього та наступного відрізків з їх значеннями, мм. На основі виконаних вимірювальних робіт у відповідності до нормативних вимог і "Методики оцінки рівності штучних покриттів геодезичним методом" та спеціально розробленої програми здійснюється оцінка фактичного мікрорельєфу, повздовжніх ухилів кінцевої і середньої ділянок поверхні злітно-посадкової смуги, величини зломів суміжних ділянок поверхні, поперечних та повздовжніх ухилів поверхні. Розраховується загальна характеристика рівності смуги. Складають таблиці алгебраїчних різниць висотних відміток і відсоткового відношення висот нерівностей повздовжнього та поперечного профілю, середніх значень в межах кожних 100 м у відповідності з планом льотного поля. По вище вказаній інформації в комп'ютері 34 формується база даних оцінки рівності поверхні аеродромного покриття, яка зберігається в пам'яті комп'ютері 34 та інших носіях інформації. В комп'ютер 34 вводиться каталог результатів геометричного мікронівелювання поверхні покриття і оцінки його рівності, які були отримані інструментальним шляхом при завершенні будівництва злітно-посадкової смуги. Каталог інструментального мікронівелювання порівнюється з результатами мікронівелювання поверхні, які були отримані з використанням запропонованого пристрою. По результатам порівняння виявляють відхилення в оцінці рівності поверхні та причини їх відхилення. Згідно отриманим даним складають каталог динаміки зміни рівності поверхні злітно-посадкової смуги. Запропонований поляриметричний вимірювач рівності та ухилів поверхні аеродромного покриття може бути конструктивно реалізовано на широко доступній елементній базі. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Поляриметричний вимірювач оцінки рівності та ухилів поверхні аеродромного покриття, що складається з рухомої платформи, блока управління, приймального пристрою випромінення лазерної указки, джерела світла, напівпрозорого дзеркала, поляризатора повздовжнього каналу, дзеркала, поляризатора поперечного каналу, приймача супутникової навігаційної системи, радіопередавального пристрою, вимірювального колеса, інкрементного датчика, розсіювальної лінзи, звукового генератора, комірки Фарадея, аналізатора поперечного каналу, 5 UA 109251 U 5 діелектричної пластини, аналізатора повздовжнього каналу, фотоприймача, підсилювача, синхронного детектора, радіоприймача, мікроконтролера, рідиннокристалічного дисплея кристалічного дисплея, блока пам'яті, лазерного дальноміра, комп'ютера, нерухомої платформи, лазерної указки, який відрізняється тим, що кути нівелювання, за допомогою яких описують мікрорельєф штучного покриття, визначаються за допомогою кутів, що відповідають азимуту площини поляризації поляризованого світла. 6 UA 109251 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E01C 23/07, G01C 1/00, G01C 9/00
Мітки: покриття, ухилів, аеродромного, поляриметричний, поверхні, рівності, вимірювач
Код посилання
<a href="https://ua.patents.su/9-109251-polyarimetrichnijj-vimiryuvach-rivnosti-ta-ukhiliv-poverkhni-aerodromnogo-pokrittya.html" target="_blank" rel="follow" title="База патентів України">Поляриметричний вимірювач рівності та ухилів поверхні аеродромного покриття</a>
Вимірювач рівності та ухилів поверхонь конструкцій аеродрому

Номер патенту: 103211
Опубліковано: 10.12.2015
Автори: Краснов Володимир Миколайович, Сагідаєв Юрій Магомедович, Кіреєв Максим Еріданович, Скрипець Андрій Васильович, Смолич Денис Вікторович
МПК: G01B 7/30
Мітки: конструкцій, поверхонь, ухилів, вимірювач, аеродрому, рівності
Формула / Реферат:
Вимірювач рівності та ухилів поверхонь конструкцій аеродрому, який містить колісну базу, встановлений на ній поворотний кронштейн, в якому закріплений корпус з розміщеними в ньому двоосьовим акселерометром, двоосьовим датчиком кутових швидкостей, мікроконтролером та рідкокристалічним дисплеєм, який відрізняється тим, що інформація про кути ухилів надходить від двох типів датчиків - акселерометра та датчика кутових швидкостей, а...
Спосіб визначення ухилів, кривизни, нерівностей дорожнього покриття
Номер патенту: 102994
Опубліковано: 25.11.2015
Автор: Каленик Костянтин Леонідович
МПК: G01C 7/04, E01C 23/07
Мітки: покриття, спосіб, визначення, ухилів, нерівностей, кривизни, дорожнього
Формула / Реферат:
Спосіб визначення ухилів, нерівностей, кривизни дорожнього покриття, що включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ шляхом обчислення значення прискорення у напрямі руху і величини поздовжнього ухилу профілю для заданої ділянки шляху, який відрізняється тим, що вимірювання прискорення транспортного...
Двошарова монолітна цементобетонна плита аеродромного покриття, що працює без взаємного ковзання конструктивних шарів
Номер патенту: 103212
Опубліковано: 10.12.2015
Автор: Родченко Олександр Васильович
МПК: E01C 3/00, E01C 11/00, E01C 11/04
Мітки: плита, ковзання, цементобетонна, взаємного, аеродромного, конструктивних, монолітна, працює, двошарова, покриття, шарів
Формула / Реферат:
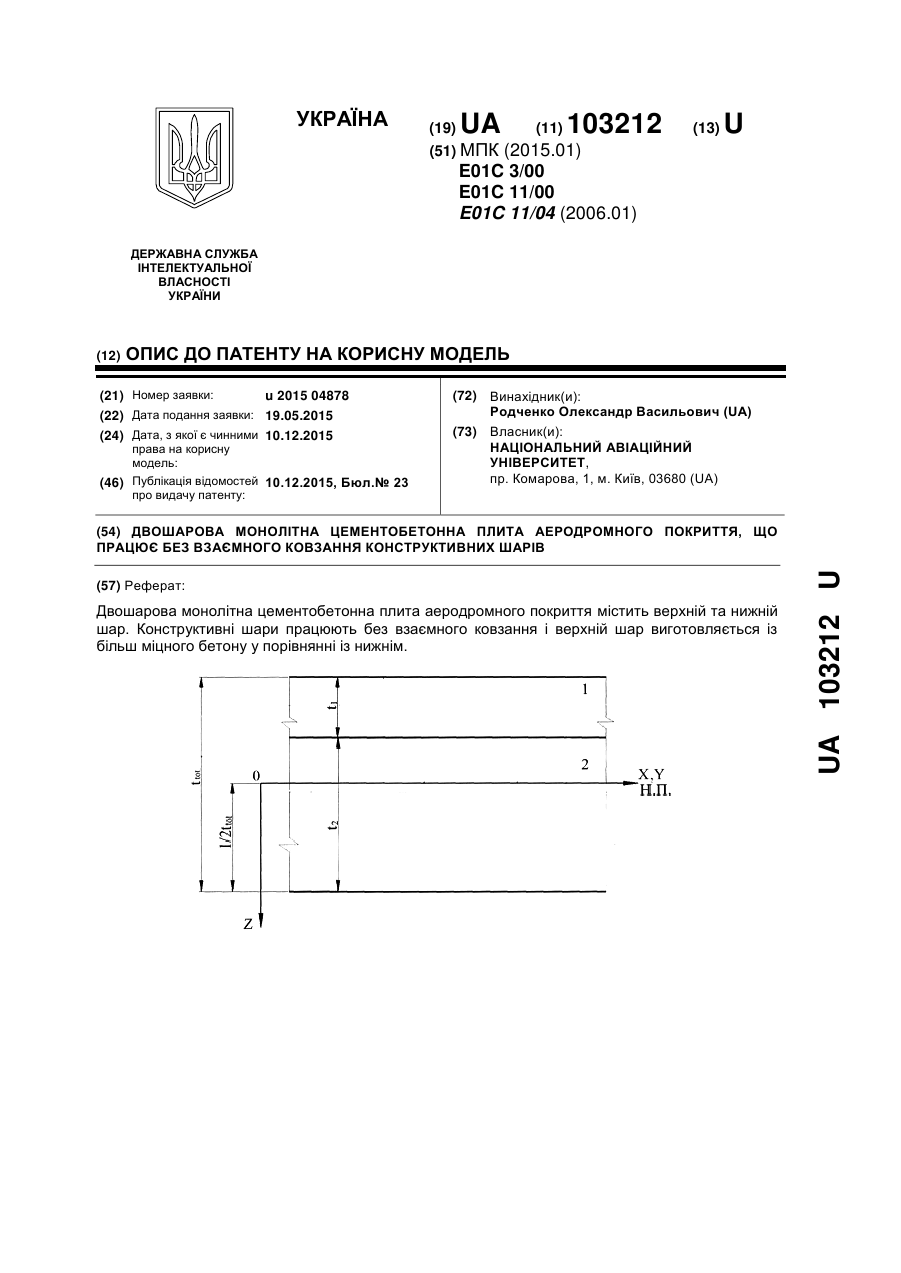
Двошарова монолітна цементобетонна плита аеродромного покриття, яка відрізняється тим, що конструктивні шари працюють без взаємного ковзання і верхній шар виготовлений із більш міцного бетону у порівнянні із нижнім.
Тришарова монолітна цементобетонна плита аеродромного покриття, що працює без взаємного ковзання конструктивних шарів
Номер патенту: 103213
Опубліковано: 10.12.2015
Автор: Родченко Олександр Васильович
МПК: E01C 11/00, E01C 11/04, E01C 3/00
Мітки: аеродромного, взаємного, плита, тришарова, покриття, монолітна, цементобетонна, ковзання, шарів, конструктивних, працює
Формула / Реферат:
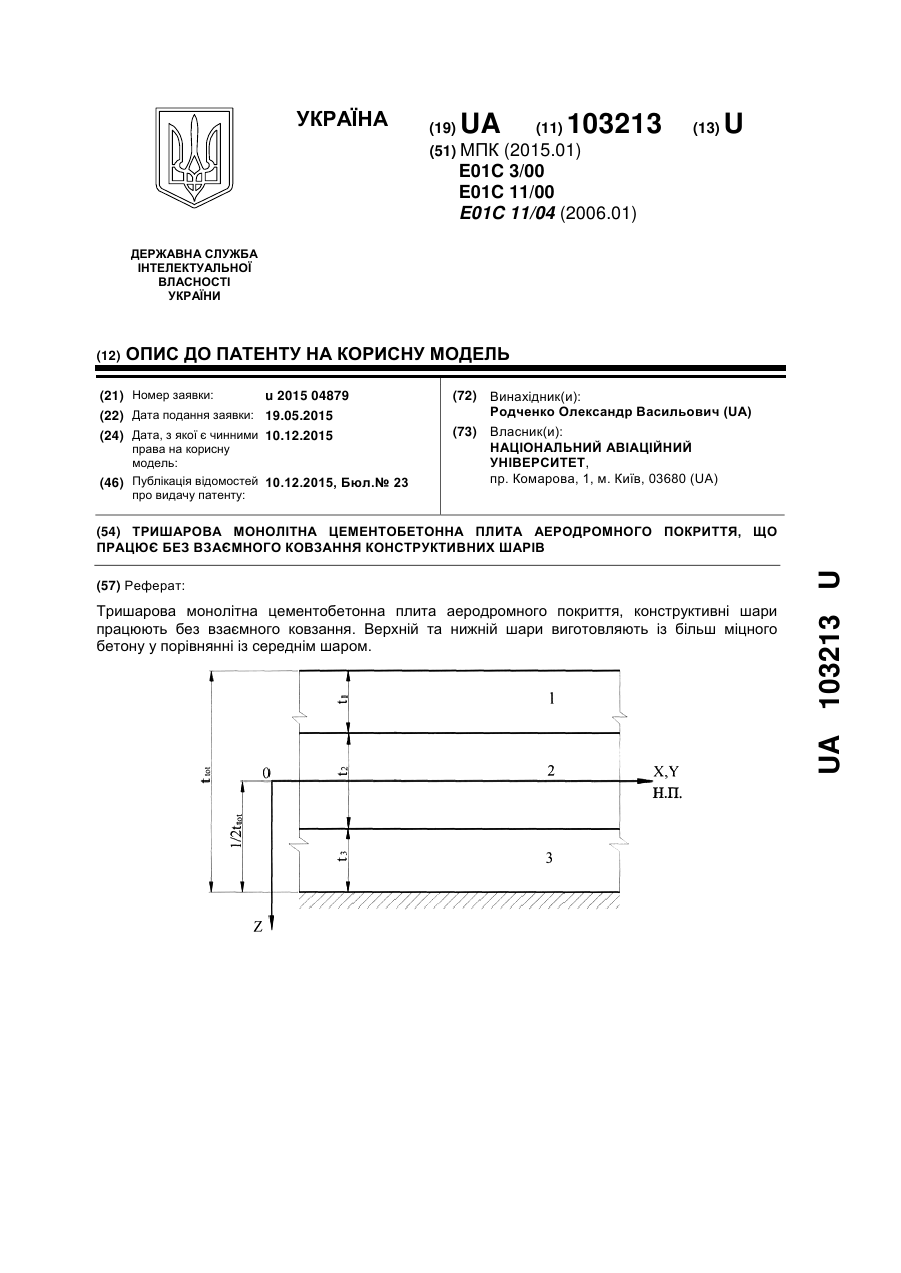
Тришарова монолітна цементобетонна плита аеродромного покриття, яка відрізняється тим, що конструктивні шари працюють без взаємного ковзання і верхній та нижній шари виготовляють із більш міцного бетону у порівнянні із середнім шаром.
В’яжуче для дорожнього і аеродромного покриття

Номер патенту: 4393
Опубліковано: 27.12.1994
Автори: Гелевера Олександр Григорович, Кривенко Павло Васильович, Глуховський Віктор Дмитрович, Ростовська Галина Степанівна
МПК: C04B 7/06, C04B 7/147, C04B 7/14, C04B 14/36, C04B 18/14, C04B 7/17
Мітки: дорожнього, в'яжуче, аеродромного, покриття
Формула / Реферат:
Вяжущее для дорожных и аэродромных покрытий, включающее гранулированный доменный шлак, соединение щелочного металла и добавку, отличающееся тем, что, с целью повышения трещиностойкости и стойкости против истирающих воздействий в условиях попеременного замораживания и оттаивания, оно содержит в качестве добавки портландцементный клинкер с содержанием алюмоферритов кальция в пределах 20-30 % при следующем соотношении компонентов, маc....
Попередній патент: Пристрій для дослідження тертя
Наступний патент: Пристрій для потоншення та збагачення шару трести конопель з хаотичним розташуванням стебел
Випадковий патент: Спосіб оцінки струму й опору шляху витоку у трифазних мережах з ізольованою нейтраллю трансформатора і визначення фази з витоком