Вимірювач рівності та ухилів поверхонь конструкцій аеродрому
Номер патенту: 103211
Опубліковано: 10.12.2015
Автори: Скрипець Андрій Васильович, Смолич Денис Вікторович, Краснов Володимир Миколайович, Сагідаєв Юрій Магомедович, Кіреєв Максим Еріданович

Формула / Реферат
Вимірювач рівності та ухилів поверхонь конструкцій аеродрому, який містить колісну базу, встановлений на ній поворотний кронштейн, в якому закріплений корпус з розміщеними в ньому двоосьовим акселерометром, двоосьовим датчиком кутових швидкостей, мікроконтролером та рідкокристалічним дисплеєм, який відрізняється тим, що інформація про кути ухилів надходить від двох типів датчиків - акселерометра та датчика кутових швидкостей, а рідкокристалічний дисплей має можливість одночасної індикації значень та знаків кутів в обох напрямах - поздовжньому та поперечному, при цьому датчики та дисплей розміщені в поворотному кронштейні, який закріплений на рухомій колісній базі, що має можливість переміщення в процесі вимірювання.
Текст
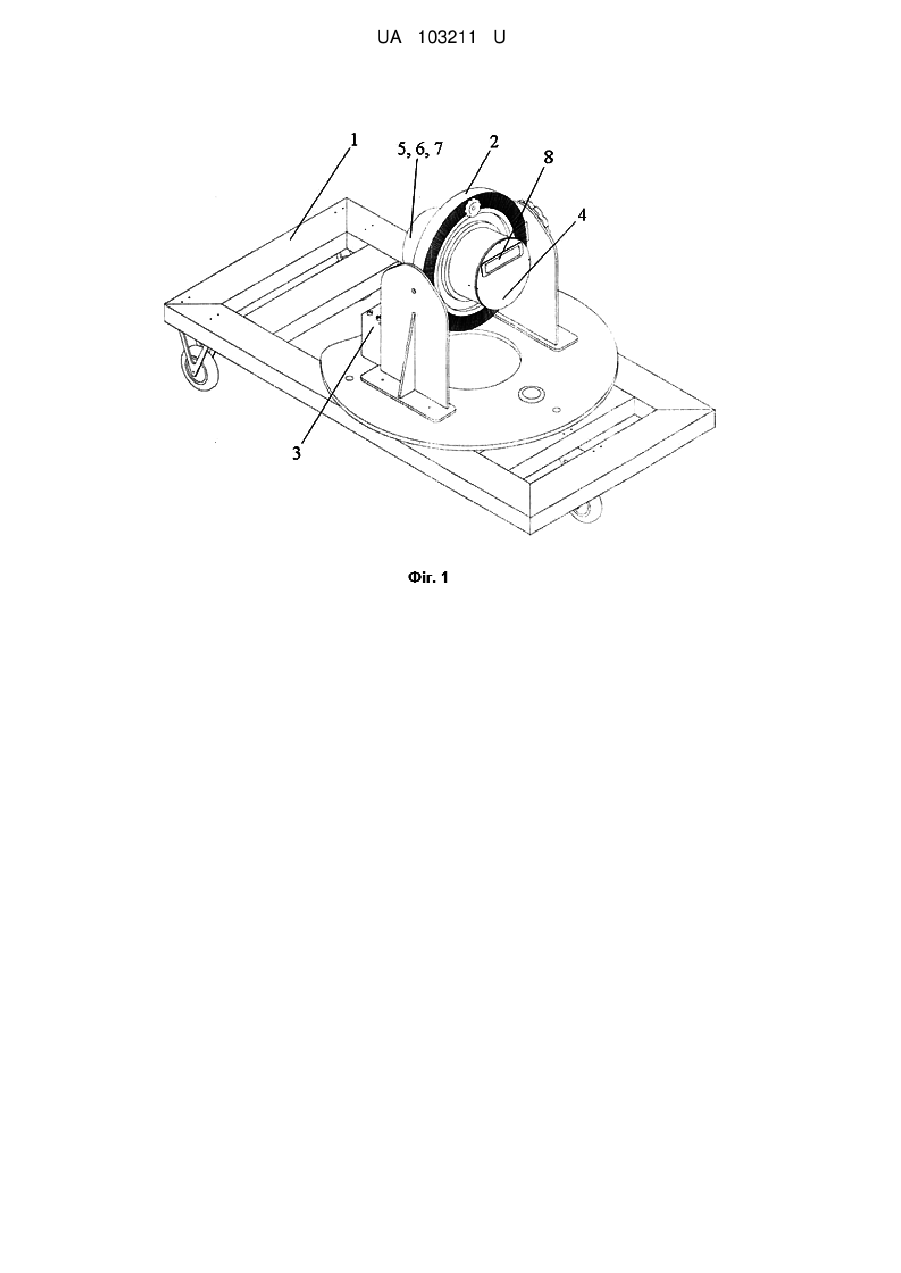
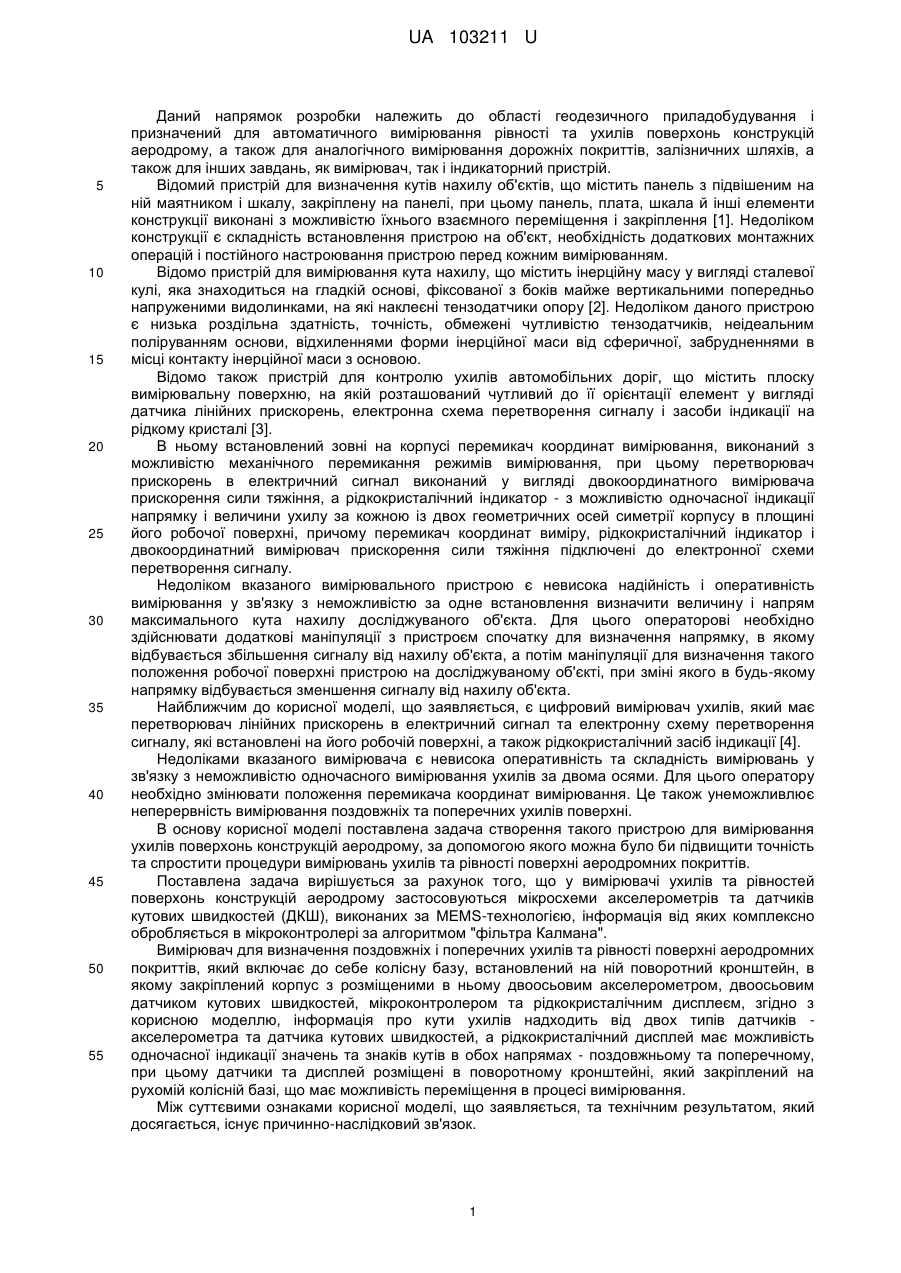
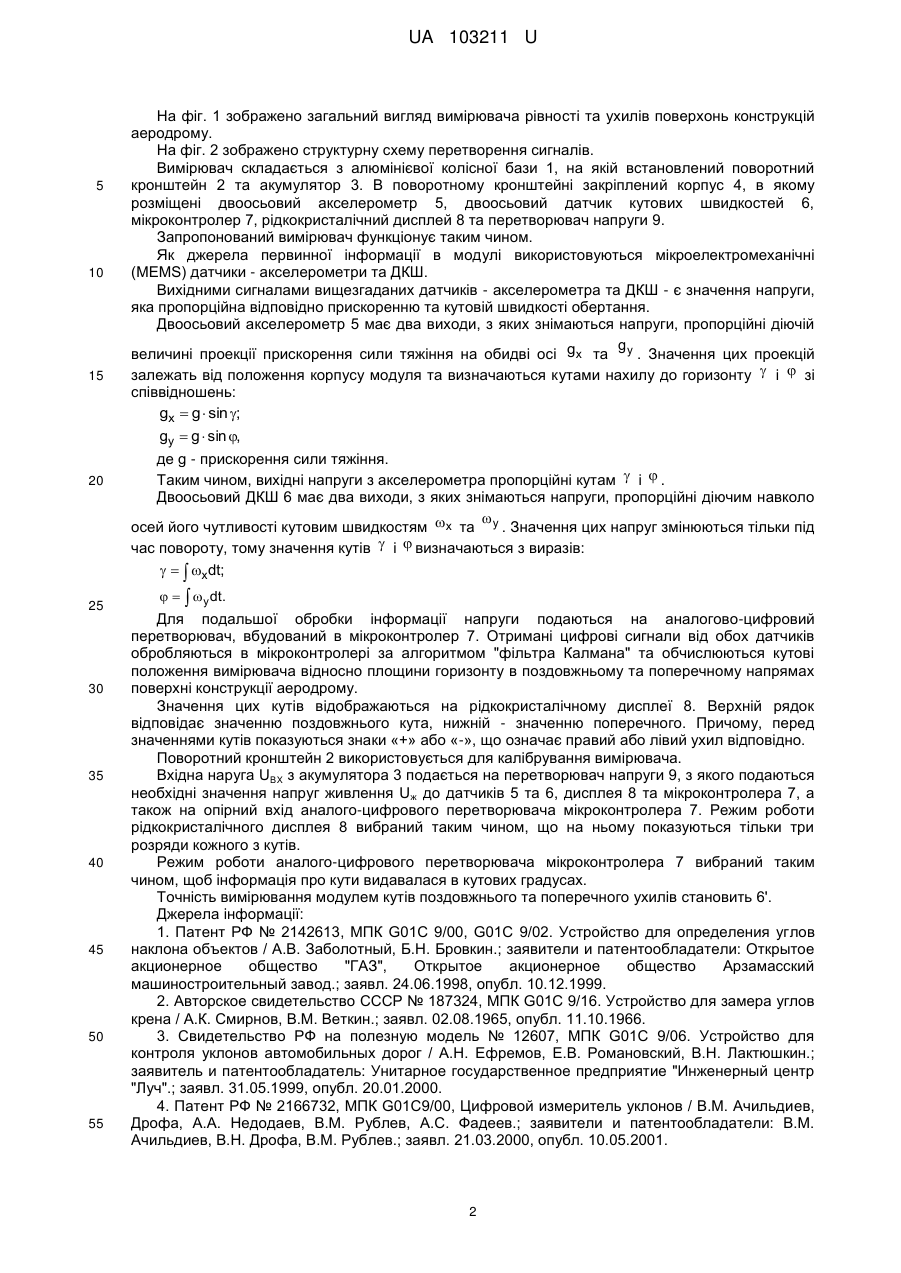
Реферат: Вимірювач для визначення поздовжніх і поперечних ухилів та рівності поверхні аеродромних покриттів включає до себе колісну базу, встановлений на ній поворотний кронштейн, в якому закріплений корпус з розміщеними в ньому двоосьовим акселерометром, двоосьовим датчиком кутових швидкостей, мікроконтролером та рідкокристалічним дисплеєм. Інформація про кути ухилів надходить від двох типів датчиків - акселерометра та датчика кутових швидкостей, а рідкокристалічний дисплей має можливість одночасної індикації значень та знаків кутів в обох напрямах - поздовжньому та поперечному, при цьому датчики та дисплей розміщені в поворотному кронштейні, який закріплений на рухомій колісній базі, що має можливість переміщення в процесі вимірювання. UA 103211 U (54) ВИМІРЮВАЧ РІВНОСТІ ТА УХИЛІВ ПОВЕРХОНЬ КОНСТРУКЦІЙ АЕРОДРОМУ UA 103211 U UA 103211 U 5 10 15 20 25 30 35 40 45 50 55 Даний напрямок розробки належить до області геодезичного приладобудування і призначений для автоматичного вимірювання рівності та ухилів поверхонь конструкцій аеродрому, а також для аналогічного вимірювання дорожніх покриттів, залізничних шляхів, а також для інших завдань, як вимірювач, так і індикаторний пристрій. Відомий пристрій для визначення кутів нахилу об'єктів, що містить панель з підвішеним на ній маятником і шкалу, закріплену на панелі, при цьому панель, плата, шкала й інші елементи конструкції виконані з можливістю їхнього взаємного переміщення і закріплення [1]. Недоліком конструкції є складність встановлення пристрою на об'єкт, необхідність додаткових монтажних операцій і постійного настроювання пристрою перед кожним вимірюванням. Відомо пристрій для вимірювання кута нахилу, що містить інерційну масу у вигляді сталевої кулі, яка знаходиться на гладкій основі, фіксованої з боків майже вертикальними попередньо напруженими видолинками, на які наклеєні тензодатчики опору [2]. Недоліком даного пристрою є низька роздільна здатність, точність, обмежені чутливістю тензодатчиків, неідеальним поліруванням основи, відхиленнями форми інерційної маси від сферичної, забрудненнями в місці контакту інерційної маси з основою. Відомо також пристрій для контролю ухилів автомобільних доріг, що містить плоску вимірювальну поверхню, на якій розташований чутливий до її орієнтації елемент у вигляді датчика лінійних прискорень, електронна схема перетворення сигналу і засоби індикації на рідкому кристалі [3]. В ньому встановлений зовні на корпусі перемикач координат вимірювання, виконаний з можливістю механічного перемикання режимів вимірювання, при цьому перетворювач прискорень в електричний сигнал виконаний у вигляді двокоординатного вимірювача прискорення сили тяжіння, а рідкокристалічний індикатор - з можливістю одночасної індикації напрямку і величини ухилу за кожною із двох геометричних осей симетрії корпусу в площині його робочої поверхні, причому перемикач координат виміру, рідкокристалічний індикатор і двокоординатний вимірювач прискорення сили тяжіння підключені до електронної схеми перетворення сигналу. Недоліком вказаного вимірювального пристрою є невисока надійність і оперативність вимірювання у зв'язку з неможливістю за одне встановлення визначити величину і напрям максимального кута нахилу досліджуваного об'єкта. Для цього операторові необхідно здійснювати додаткові маніпуляції з пристроєм спочатку для визначення напрямку, в якому відбувається збільшення сигналу від нахилу об'єкта, а потім маніпуляції для визначення такого положення робочої поверхні пристрою на досліджуваному об'єкті, при зміні якого в будь-якому напрямку відбувається зменшення сигналу від нахилу об'єкта. Найближчим до корисної моделі, що заявляється, є цифровий вимірювач ухилів, який має перетворювач лінійних прискорень в електричний сигнал та електронну схему перетворення сигналу, які встановлені на його робочій поверхні, а також рідкокристалічний засіб індикації [4]. Недоліками вказаного вимірювача є невисока оперативність та складність вимірювань у зв'язку з неможливістю одночасного вимірювання ухилів за двома осями. Для цього оператору необхідно змінювати положення перемикача координат вимірювання. Це також унеможливлює неперервність вимірювання поздовжніх та поперечних ухилів поверхні. В основу корисної моделі поставлена задача створення такого пристрою для вимірювання ухилів поверхонь конструкцій аеродрому, за допомогою якого можна було би підвищити точність та спростити процедури вимірювань ухилів та рівності поверхні аеродромних покриттів. Поставлена задача вирішується за рахунок того, що у вимірювачі ухилів та рівностей поверхонь конструкцій аеродрому застосовуються мікросхеми акселерометрів та датчиків кутових швидкостей (ДКШ), виконаних за MEMS-технологією, інформація від яких комплексно обробляється в мікроконтролері за алгоритмом "фільтра Калмана". Вимірювач для визначення поздовжніх і поперечних ухилів та рівності поверхні аеродромних покриттів, який включає до себе колісну базу, встановлений на ній поворотний кронштейн, в якому закріплений корпус з розміщеними в ньому двоосьовим акселерометром, двоосьовим датчиком кутових швидкостей, мікроконтролером та рідкокристалічним дисплеєм, згідно з корисною моделлю, інформація про кути ухилів надходить від двох типів датчиків акселерометра та датчика кутових швидкостей, а рідкокристалічний дисплей має можливість одночасної індикації значень та знаків кутів в обох напрямах - поздовжньому та поперечному, при цьому датчики та дисплей розміщені в поворотному кронштейні, який закріплений на рухомій колісній базі, що має можливість переміщення в процесі вимірювання. Між суттєвими ознаками корисної моделі, що заявляється, та технічним результатом, який досягається, існує причинно-наслідковий зв'язок. 1 UA 103211 U 5 10 15 20 25 30 35 40 45 50 55 На фіг. 1 зображено загальний вигляд вимірювача рівності та ухилів поверхонь конструкцій аеродрому. На фіг. 2 зображено структурну схему перетворення сигналів. Вимірювач складається з алюмінієвої колісної бази 1, на якій встановлений поворотний кронштейн 2 та акумулятор 3. В поворотному кронштейні закріплений корпус 4, в якому розміщені двоосьовий акселерометр 5, двоосьовий датчик кутових швидкостей 6, мікроконтролер 7, рідкокристалічний дисплей 8 та перетворювач напруги 9. Запропонований вимірювач функціонує таким чином. Як джерела первинної інформації в модулі використовуються мікроелектромеханічні (MEMS) датчики - акселерометри та ДКШ. Вихідними сигналами вищезгаданих датчиків - акселерометра та ДКШ - є значення напруги, яка пропорційна відповідно прискоренню та кутовій швидкості обертання. Двоосьовий акселерометр 5 має два виходи, з яких знімаються напруги, пропорційні діючій g величині проекції прискорення сили тяжіння на обидві осі gx та y . Значення цих проекцій залежать від положення корпусу модуля та визначаються кутами нахилу до горизонту і зі співвідношень: gx g sin ; gy g sin , де g - прискорення сили тяжіння. Таким чином, вихідні напруги з акселерометра пропорційні кутам і . Двоосьовий ДКШ 6 має два виходи, з яких знімаються напруги, пропорційні діючим навколо осей його чутливості кутовим швидкостям x та y . Значення цих напруг змінюються тільки під час повороту, тому значення кутів і визначаються з виразів: x dt; y dt. Для подальшої обробки інформації напруги подаються на аналогово-цифровий перетворювач, вбудований в мікроконтролер 7. Отримані цифрові сигнали від обох датчиків обробляються в мікроконтролері за алгоритмом "фільтра Калмана" та обчислюються кутові положення вимірювача відносно площини горизонту в поздовжньому та поперечному напрямах поверхні конструкції аеродрому. Значення цих кутів відображаються на рідкокристалічному дисплеї 8. Верхній рядок відповідає значенню поздовжнього кута, нижній - значенню поперечного. Причому, перед значеннями кутів показуються знаки «+» або «-», що означає правий або лівий ухил відповідно. Поворотний кронштейн 2 використовується для калібрування вимірювача. Вхідна наруга UBX з акумулятора 3 подається на перетворювач напруги 9, з якого подаються необхідні значення напруг живлення Uж до датчиків 5 та 6, дисплея 8 та мікроконтролера 7, а також на опірний вхід аналого-цифрового перетворювача мікроконтролера 7. Режим роботи рідкокристалічного дисплея 8 вибраний таким чином, що на ньому показуються тільки три розряди кожного з кутів. Режим роботи аналого-цифрового перетворювача мікроконтролера 7 вибраний таким чином, щоб інформація про кути видавалася в кутових градусах. Точність вимірювання модулем кутів поздовжнього та поперечного ухилів становить 6'. Джерела інформації: 1. Патент РФ № 2142613, МПК G01C 9/00, G01C 9/02. Устройство для определения углов наклона объектов / А.В. Заболотный, Б.Н. Бровкин.; заявители и патентообладатели: Открытое акционерное общество "ГАЗ", Открытое акционерное общество Арзамасский машиностроительный завод.; заявл. 24.06.1998, опубл. 10.12.1999. 2. Авторское свидетельство СССР № 187324, МПК G01C 9/16. Устройство для замера углов крена / А.К. Смирнов, В.М. Веткин.; заявл. 02.08.1965, опубл. 11.10.1966. 3. Свидетельство РФ на полезную модель № 12607, МПК G01C 9/06. Устройство для контроля уклонов автомобильных дорог / А.Н. Ефремов, Е.В. Романовский, В.Н. Лактюшкин.; заявитель и патентообладатель: Унитарное государственное предприятие "Инженерный центр "Луч".; заявл. 31.05.1999, опубл. 20.01.2000. 4. Патент РФ № 2166732, МПК G01C9/00, Цифровой измеритель уклонов / В.М. Ачильдиев, Дрофа, А.А. Недодаев, В.М. Рублев, А.С. Фадеев.; заявители и патентообладатели: В.М. Ачильдиев, В.Н. Дрофа, В.М. Рублев.; заявл. 21.03.2000, опубл. 10.05.2001. 2 UA 103211 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Вимірювач рівності та ухилів поверхонь конструкцій аеродрому, який містить колісну базу, встановлений на ній поворотний кронштейн, в якому закріплений корпус з розміщеними в ньому двоосьовим акселерометром, двоосьовим датчиком кутових швидкостей, мікроконтролером та рідкокристалічним дисплеєм, який відрізняється тим, що інформація про кути ухилів надходить від двох типів датчиків - акселерометра та датчика кутових швидкостей, а рідкокристалічний дисплей має можливість одночасної індикації значень та знаків кутів в обох напрямах поздовжньому та поперечному, при цьому датчики та дисплей розміщені в поворотному кронштейні, який закріплений на рухомій колісній базі, що має можливість переміщення в процесі вимірювання. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of slope and equality of surface of airport paving
Автори англійськоюKireev Maksym Eridanovych, Smolych Denys Viktotovych, Krasnov Volodymyr Mykolayovych, Skrypets Andrii Vasylyovych, Sagidaev Iurii Magomedovych
Назва патенту російськоюИзмеритель равенства и уклонов поверхностей конструкций аэродрома
Автори російськоюКиреев Максим Ериданович, Смолич Денис Викторович, Краснов Владимир Николаевич, Скрипец Андрей Васильевич, Сагидаев Юрий Магомедович
МПК / Мітки
МПК: G01B 7/30
Мітки: конструкцій, ухилів, рівності, поверхонь, вимірювач, аеродрому
Код посилання
<a href="https://ua.patents.su/5-103211-vimiryuvach-rivnosti-ta-ukhiliv-poverkhon-konstrukcijj-aerodromu.html" target="_blank" rel="follow" title="База патентів України">Вимірювач рівності та ухилів поверхонь конструкцій аеродрому</a>
Вимірювач шорсткості поверхонь конструкцій аеродрому
Номер патенту: 98226
Опубліковано: 27.04.2015
Автори: Краснов Володимир Миколайович, Кіреєв Максим Еріданович, Сагідаєв Юрій Магомедович, Смолич Денис Вікторович, Скрипець Андрій Васильович
МПК: G01B 11/30
Мітки: вимірювач, аеродрому, поверхонь, конструкцій, шорсткості
Формула / Реферат:
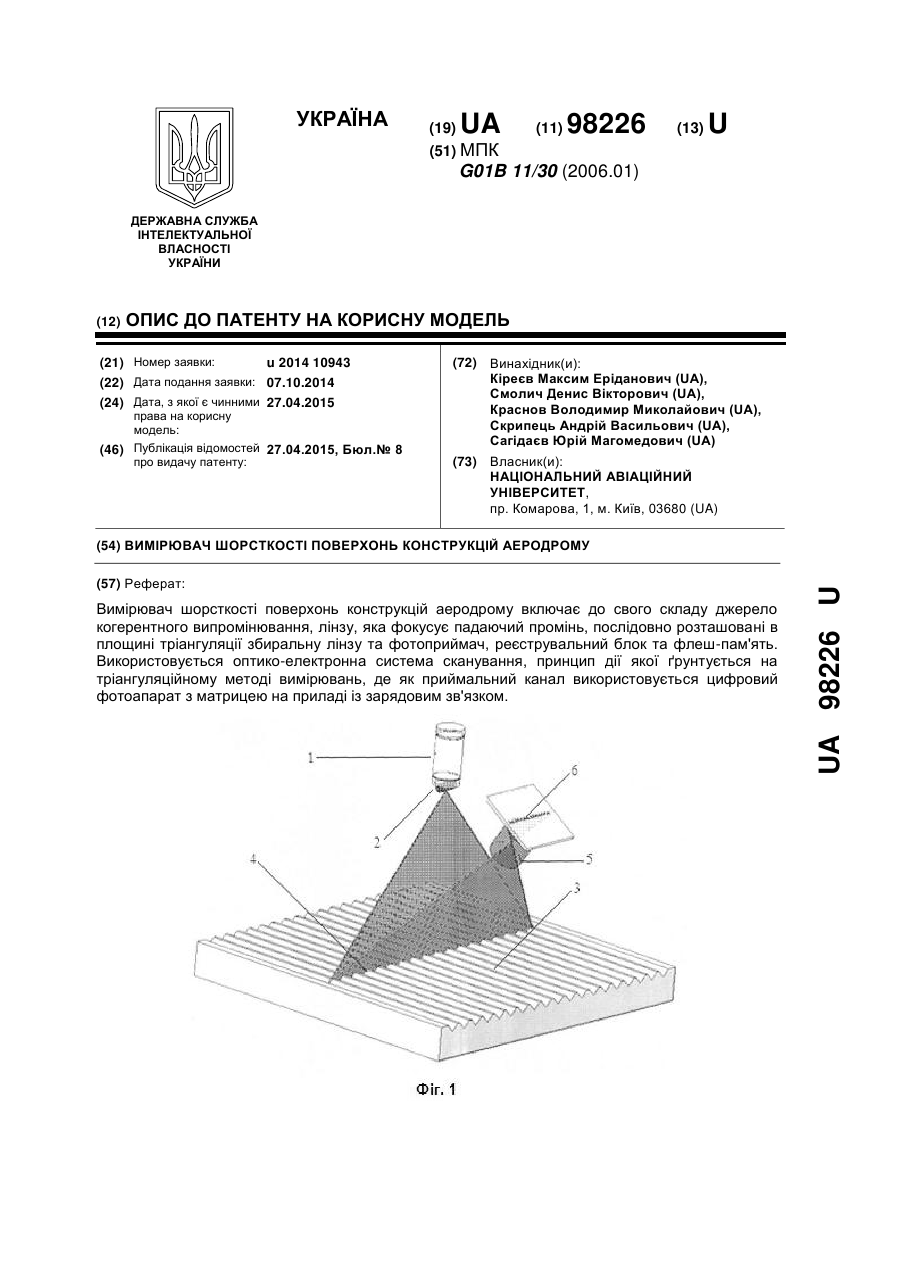
Вимірювач шорсткості поверхонь конструкцій аеродрому, який містить джерело когерентного випромінювання, лінзу, яка фокусує падаючий промінь, послідовно розташовані в площині тріангуляції збиральну лінзу та фотоприймач, реєструвальний блок та флеш-пам'ять, який відрізняється тим, що використовується оптико-електронна система сканування, принцип дії якої ґрунтується на тріангуляційному методі вимірювань, де як приймальний канал...
Спосіб визначення ухилів, кривизни, нерівностей дорожнього покриття
Номер патенту: 102994
Опубліковано: 25.11.2015
Автор: Каленик Костянтин Леонідович
МПК: E01C 23/07, G01C 7/04
Мітки: кривизни, спосіб, ухилів, визначення, нерівностей, покриття, дорожнього
Формула / Реферат:
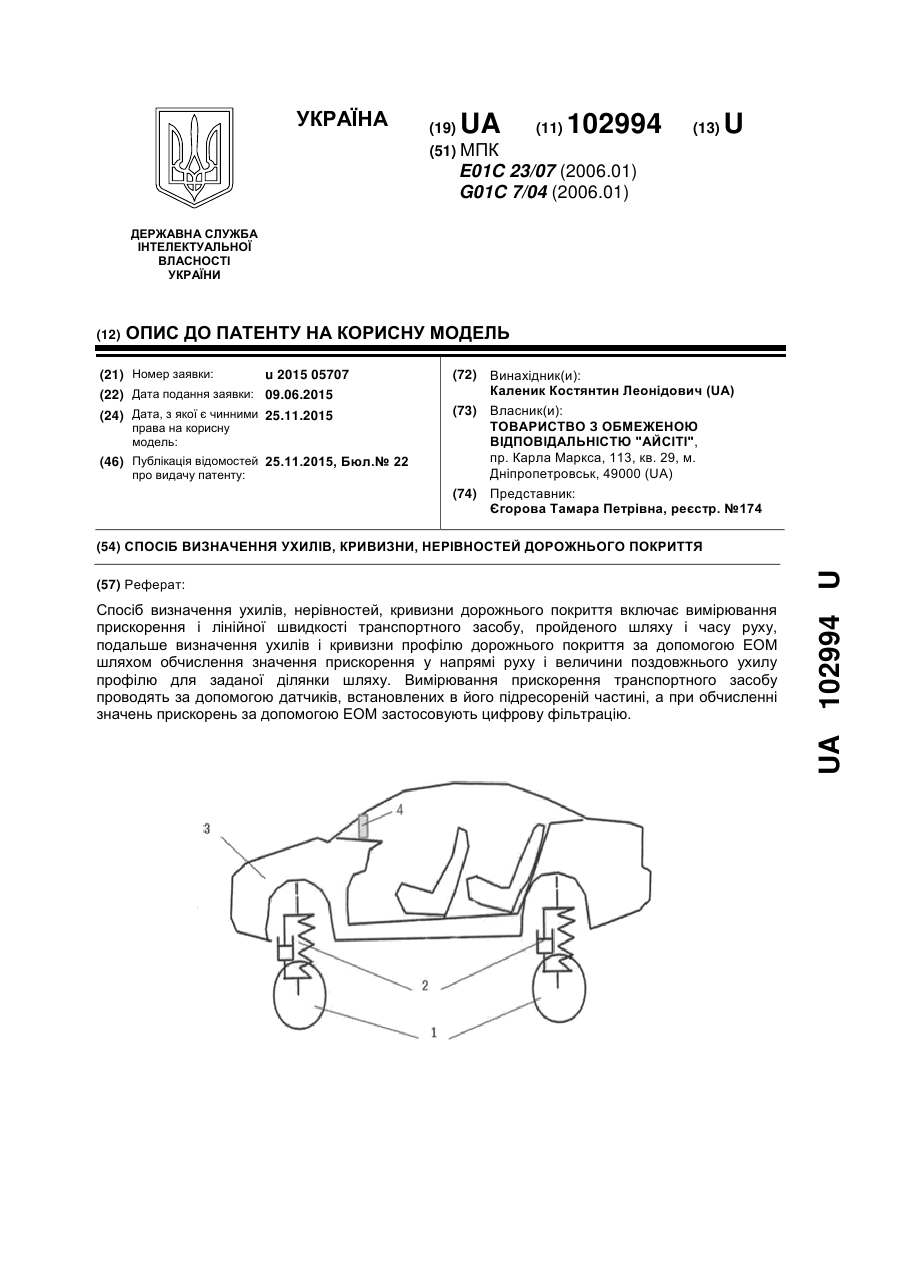
Спосіб визначення ухилів, нерівностей, кривизни дорожнього покриття, що включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ шляхом обчислення значення прискорення у напрямі руху і величини поздовжнього ухилу профілю для заданої ділянки шляху, який відрізняється тим, що вимірювання прискорення транспортного...
Вимірювач кутової швидкості
Номер патенту: 76302
Опубліковано: 25.12.2012
Автори: Воробйов Павло Андрійович, Гордін Олександр Григорович
МПК: G01P 3/00
Мітки: швидкості, кутової, вимірювач
Формула / Реферат:
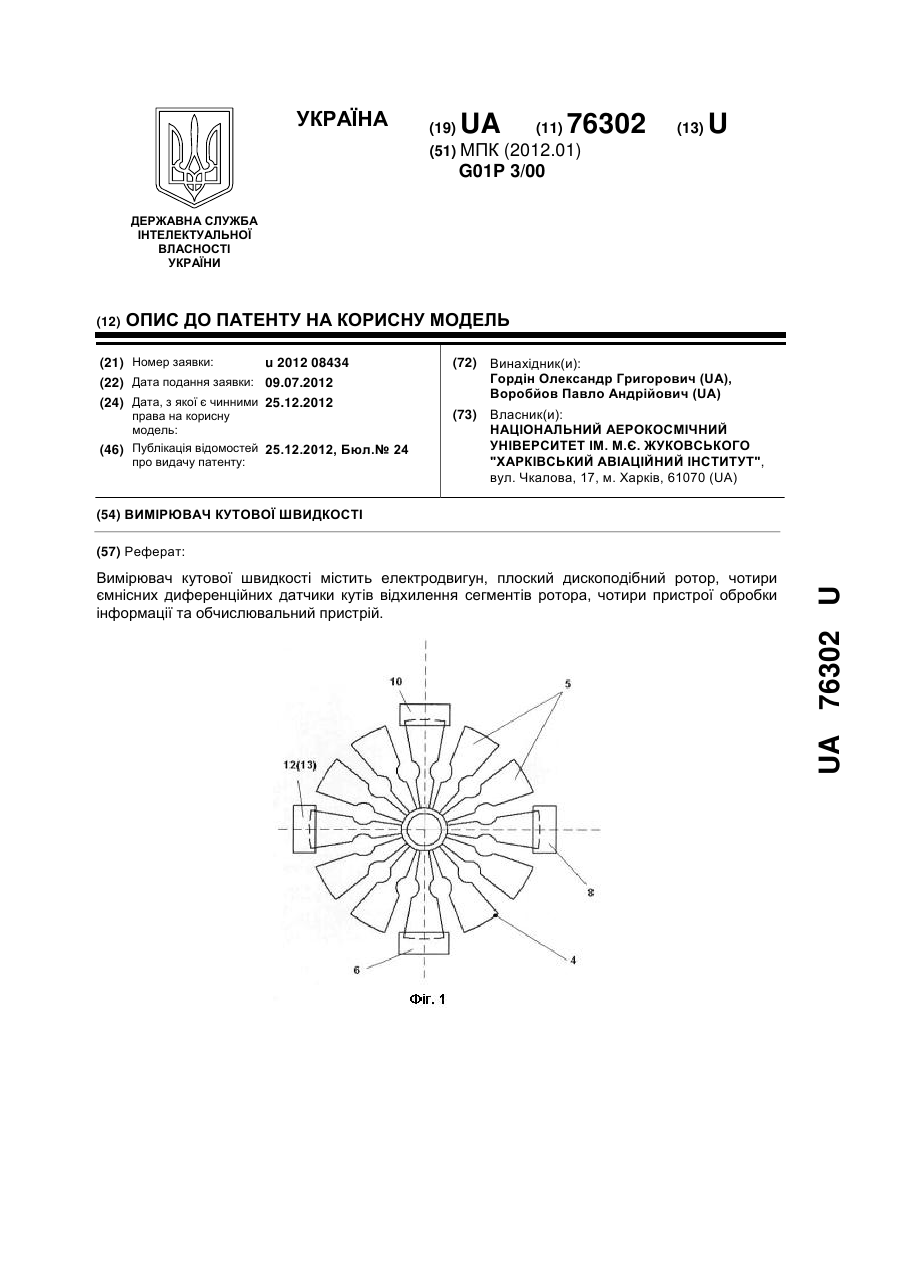
Вимірювач кутової швидкості, що містить електродвигун, на валу якого знаходиться плоский дископодібний ротор, який складається з окремих радіально розташованих сегментів, який відрізняється тим, що в вимірювач кутової швидкості введені чотири ємнісних диференційних датчики кутів відхилення сегментів ротора, чотири пристрої обробки інформації та обчислювальний пристрій, причому виходи кожного з датчиків кутів відхилення сегментів ротора...
Злітно-посадочна смуга аеродрому
Номер патенту: 63356
Опубліковано: 15.01.2004
Автори: Алексєєв Юрій Сергійович, Комаров Володимир Олександрович, Межуєв Микола Миколайович, Однороженко Василь Борисович, Тітова Марина Анатоліївна, Кабардін Микола Костянтинович, Степанян Бениамин Гургенович
МПК: E01C 5/06
Мітки: смуга, злітно-посадочна, аеродрому
Формула / Реферат:
1. Злітно-посадочна смуга аеродрому, що містить залізобетонні плити, розміщені в горизонтальній площині, при цьому плити утримують сталеву арматуру, що залита бетоном, і покладені на подушку, яка виконана з шарів піску та гравію товщиною більше 1 метра, яка відрізняється тим, що арматура розташована усередині об'єму плити так, що утворює антенні грати, при цьому схема розташування арматури в кожній із плит може бути різною для утворення...
Вимірювач кутових величин
Номер патенту: 27077
Опубліковано: 10.10.2007
Автори: П'ясковський Дмитро Володимирович, Піонтківський Петро Миколайович, Водоп'ян Сергій Васильович, Гуменюк Володимир Олександрович, Піскун Олег Миколайович
МПК: G01C 3/00, G01S 17/00
Мітки: кутових, величин, вимірювач
Формула / Реферат:
Вимірювач кутових величин, що містить опорний генератор, фазообертач та перетворювач, при цьому вихід опорного генератора з'єднаний з входом фазообертача а вихід фазообертача з'єднаний з входом перетворювача сигналу, який відрізняється тим що перетворювач містить два аналогово-цифрових перетворювачі та мікроконтролер, при цьому вихід опорного генератора додатково з'єднаний з входом другого аналогово-цифрового перетворювача, вихід фазообертача...