Спосіб компенсації температурної погрішності масштабного коефіцієнта вібраційного гіроскопа
Номер патенту: 111408
Опубліковано: 25.04.2016
Автори: Чіковані Валерій Валеріанович, Цирук Віктор Григорович, Маляров Сергій Прокопович, Петренко Олексій Володимирович
Формула / Реферат
1. Спосіб компенсації температурної погрішності масштабного коефіцієнта вібраційного гіроскопа, який полягає в тому, що вимірюють вихідний сигнал гіроскопа, що відповідає звісній постійній кутовій швидкості і температурі гіроскопа у не менше, ніж двох фіксованих значеннях температури, обчисленні калібрувальних значень коефіцієнтів температурної моделі і компенсації температурної погрішності з використанням обчислених коефіцієнтів, який відрізняється тим, що додатково вимірюють сигнали частоти вібрації, амплітуди збудження і амплітуди квадратури при безперервній зміні температури в робочому діапазоні температур, обчислюють додаткові калібрувальні значення коефіцієнтів моделі, які відповідають додатковим вимірюваним сигналам і доповнюють компенсацію температурної погрішності масштабного коефіцієнта.
2. Спосіб за п. 1, який відрізняється тим, що використовується поліноміальна модель температурної залежності масштабного коефіцієнта від сигналів, що додатково вимірюються.
3. Спосіб за п. 2, який відрізняється тим, що калібрувальні коефіцієнти моделі обчислюються методом множинної регресії.
Текст
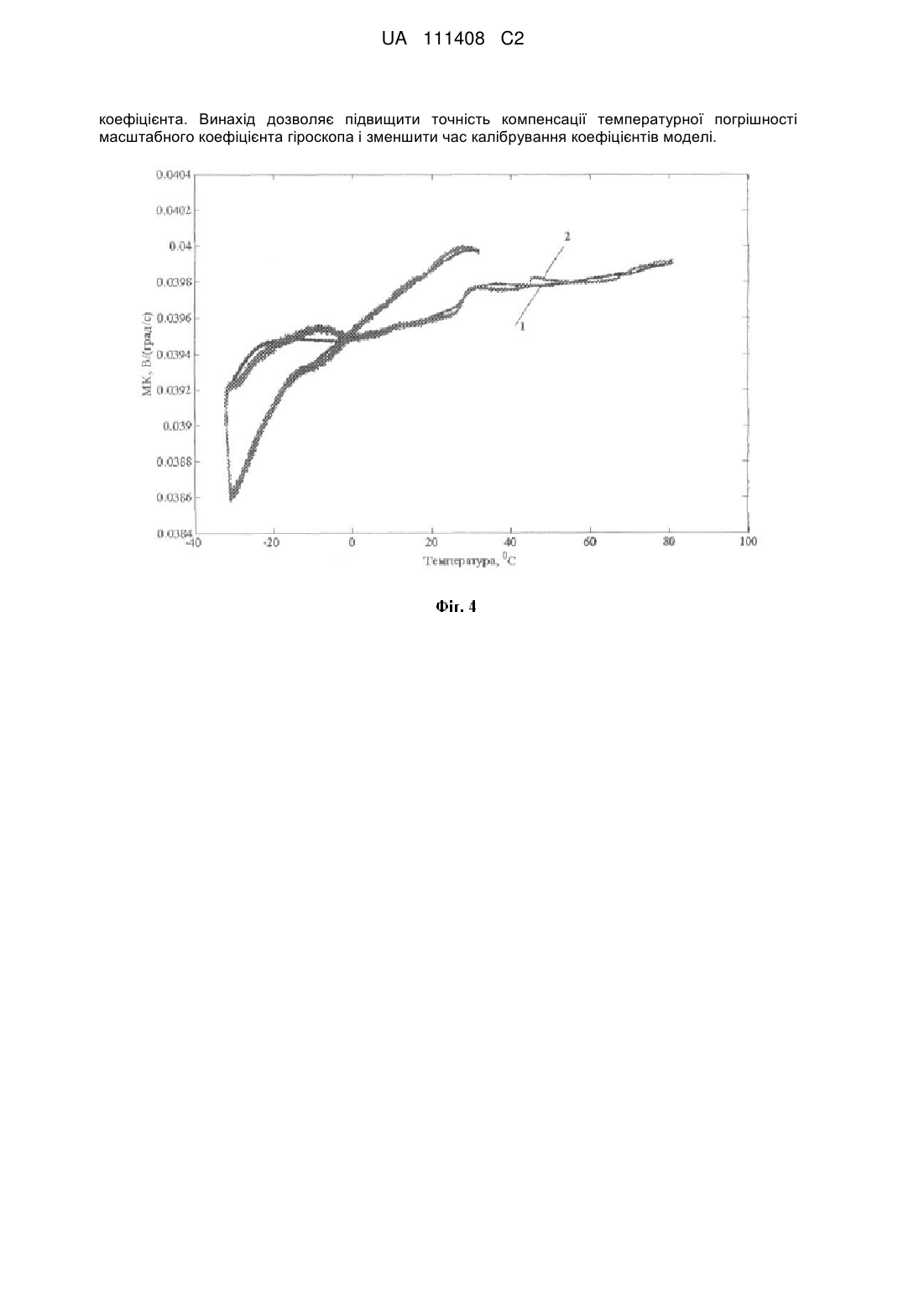
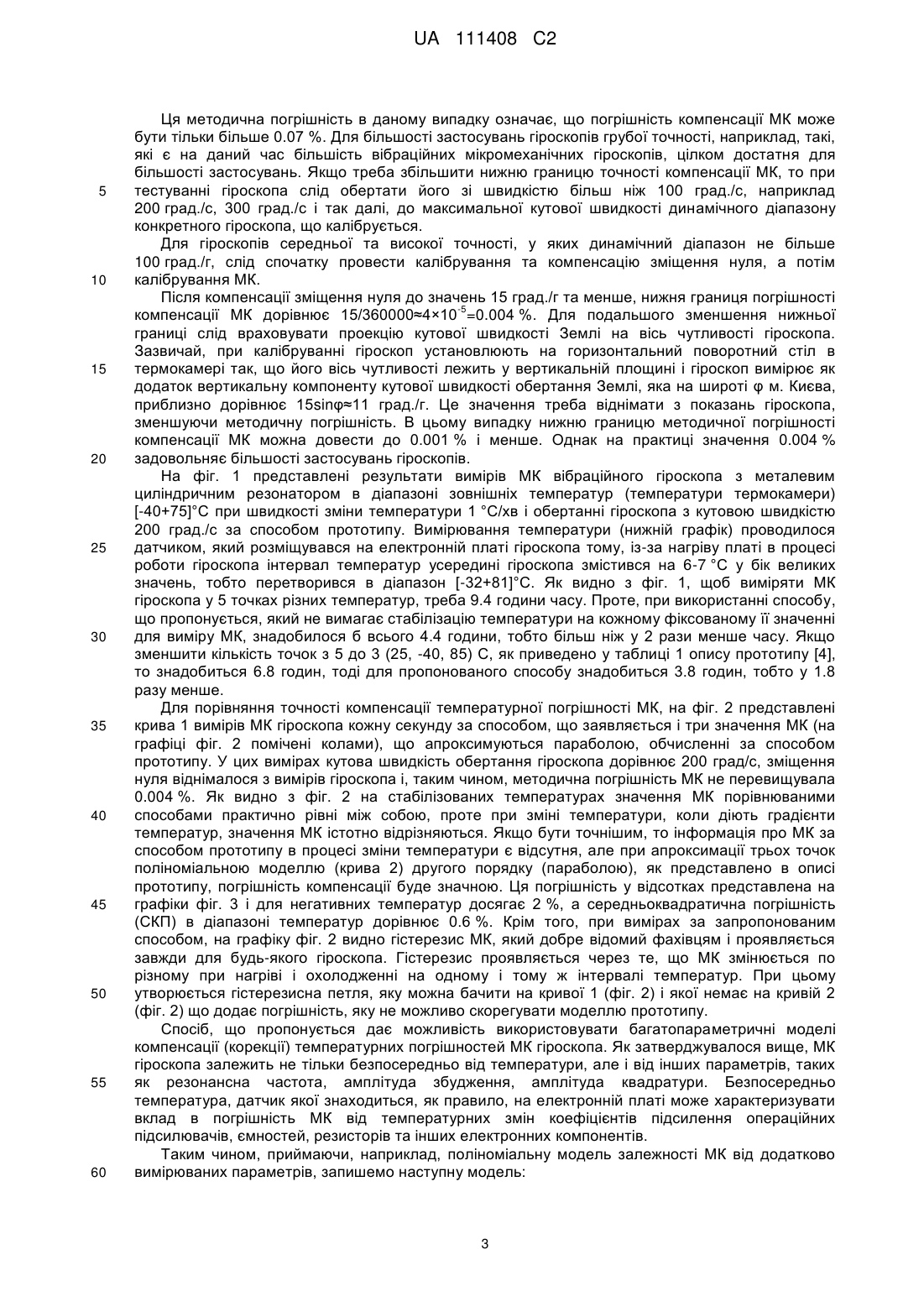
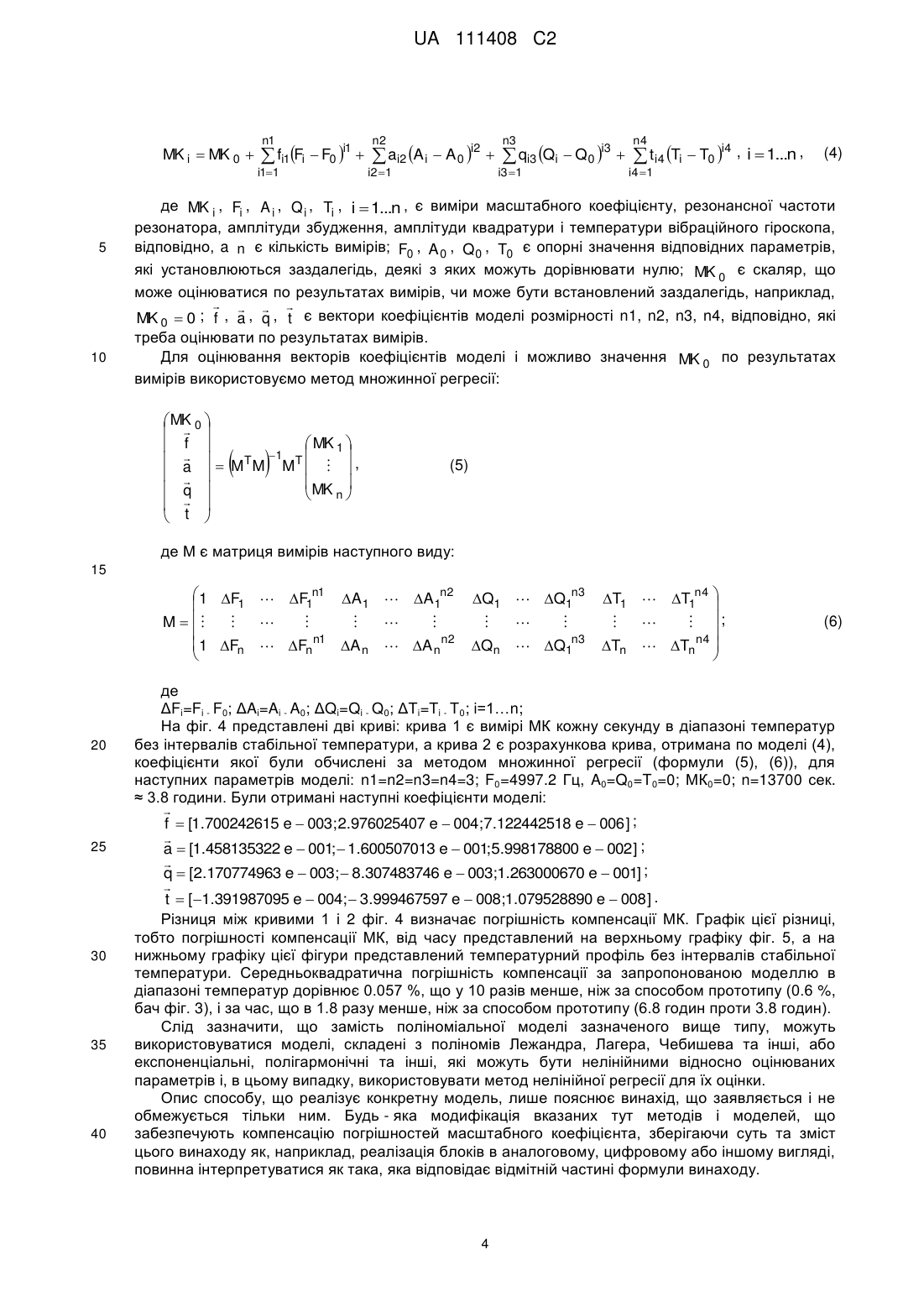
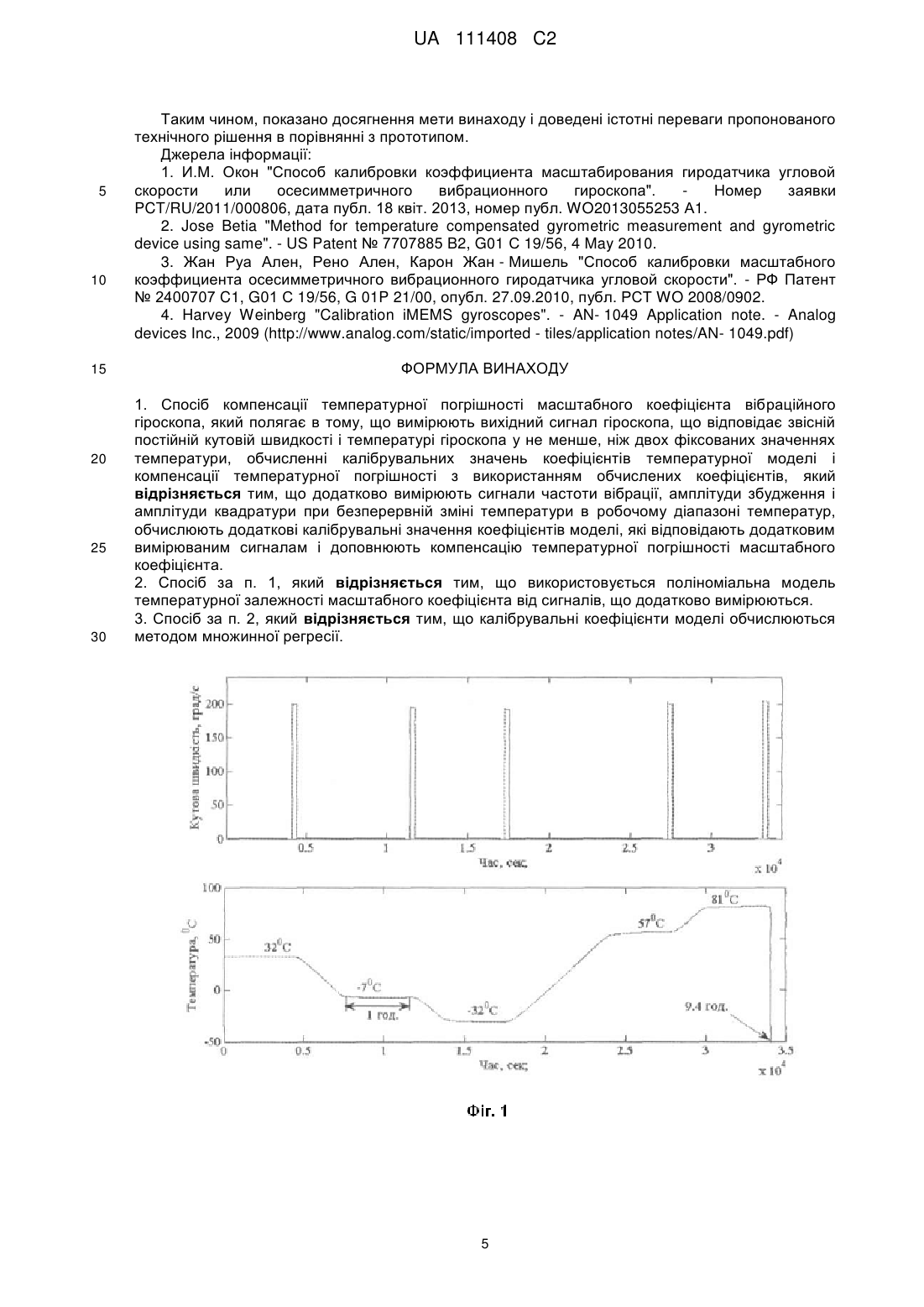
Реферат: Винахід належить до гіроскопів. Спосіб компенсації температурної погрішності масштабного коефіцієнта вібраційного гіроскопа полягає в тому, що вимірюють вихідний сигнал гіроскопа, що відповідає звісній постійній кутовій швидкості і температурі гіроскопа у не менше, ніж двох фіксованих значеннях температури, обчисленні калібрувальних значень коефіцієнтів температурної моделі і компенсації температурної погрішності з використанням обчислених коефіцієнтів. Додатково вимірюються сигнали частоти вібрації, амплітуди збудження і амплітуди квадратури при безперервній зміні температури в робочому діапазоні температур, обчислюють додаткові калібрувальні значення коефіцієнтів моделі, які відповідають додатковим вимірюваним сигналам і доповнюють компенсацію температурної погрішності масштабного UA 111408 C2 (12) UA 111408 C2 коефіцієнта. Винахід дозволяє підвищити точність компенсації температурної погрішності масштабного коефіцієнта гіроскопа і зменшити час калібрування коефіцієнтів моделі. UA 111408 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до гіроскопів, зокрема до способу компенсації температурної погрішності масштабного коефіцієнта вібраційного гіроскопа в робочому діапазоні температур шляхом визначення калібрувальних коефіцієнтів за результатами випробувань переважно на заводі виробнику. Відомі способі калібрування масштабного коефіцієнта вібраційного гіроскопа [1, 2, 3], в яких спочатку визначають залежність коефіцієнта підсилення каналу збудження від масштабного коефіцієнта гіроскопа можливо у заводських умовах як пропонується у [3], а потім по вимірах коефіцієнта підсилення в умовах експлуатації обчислюють масштабний коефіцієнт гіроскопа, використовуючи пропорцію. Головний недолік цих технічних рішень-аналогів є те, що при зміни температури виникає градієнти температур, при яких не виконуються пропорційні залежності, а виникають нелінійності, що призводять до зростання погрішності калібрування і, відповідно, погрішності компенсації МК. Найбільш близьким по технічній суті до способу, що заявляється, є спосіб калібрування масштабного коефіцієнта, описаний у джерелі [4] (додається до матеріалів заявки), який полягає в тому, що вимірюються вихідний сигнал гіроскопа, що відповідає звісній постійній кутовій швидкості, і температурі гіроскопа у не менше, ніж двох фіксованих значеннях температури, обчисленні калібрувальних значень коефіцієнтів температурної моделі і компенсації температурної погрішності з використанням обчислених коефіцієнтів. Недоліки прототипу такі, що виміри здійснюються на фіксованих температурах чутливого елемента. Тобто треба щоб зовнішня температура була встановлена на першому значенні, наприклад, -40 °C, почекати встановлення цієї температури усередині гіроскопа і його чутливого елемента, який знаходиться, як правило, у вакуумі, і здійснити виміри. Час встановлення температури усередині чутливого елемента, як правило, не менше 1 години. В плині цього часу виміри не здійснюються, оскільки вимірювані сигнали змінюються і їх виміри приводять до погрішностей обчислювання коефіцієнтів моделі. Такий час чекання встановлення температури треба втрачати на кожній фіксованій температурі. Якщо прийняти лінійну модель залежності масштабного коефіцієнта від температури, то необхідно визначити два коефіцієнти моделі, до чого потрібні виміри на двох фіксованих температурах (Т 0 і Т1). При цьому втрачається дві години на встановлення температури. Для поліноміальній моделі другого порядку (парабола) знадобиться три фіксовані температури (Т 0, Т1 і Т2, див. формул (10, 11) опису прототипу [4], що додається), і відповідно, втрачається 3 години і так далі. Крім того, спосіб, описаний в прототипі не враховує зміни масштабного коефіцієнта під час зміни температурі, коли діють температурні градієнти. Це також призводить до зростання погрішностей компенсації, бо в практичних умовах експлуатації, якщо спеціально не стабілізувати температуру, діятимуть температурні градієнти. Також слід зазначити, що масштабний коефіцієнт залежить не тільки від температури, але і від резонансної частоти вібрації та інших сигналів, наприклад сигналів управління вібраційною хвилею. Крім того, датчик температури, який, як правило, установлюють на електронній платі, показує температуру плати в точці його установки, а резонансна частота є функція просторового розподілу температури за об'ємом резонатора, як частини чутливого елемента гіроскопа і значно точніше описує зміну масштабного коефіцієнта. Теж саме можна сказати про таки важливі сигнали управляння вібраційною хвилею як амплітуда збудження і амплітуда квадратури, які особливо істотно впливають на зміну масштабного коефіцієнта при зміні температурі, коли виникають градієнти температур. Останнє є наслідок порушення ортогональності фаз вказаних сигналів і сигналу кутової швидкості. В основу винаходу поставлена задача підвищення точності компенсації температурної погрішності масштабного коефіцієнта гіроскопа і зменшення часу калібрування коефіцієнтів моделі за рахунок того, що додатково вимірюються сигнали частоти вібрації, амплітуди збудження і амплітуди квадратури при безперервній зміні температури в робочому діапазоні температур, обчислення додаткових калібрувальних значень коефіцієнтів моделі, які відповідають додатковим вимірюваним сигналам і доповнюють компенсацію температурної погрішності масштабного коефіцієнта. Крім того, використовується поліноміальна модель температурної залежності масштабного коефіцієнта від сигналів, що додатково вимірюються, а калібрувальні коефіцієнті моделі обчислюються методом множинної регресії. В способі, що пропонується зменшення часу калібрування коефіцієнтів моделі забезпечується тим, що не треба чекати стабілізації фіксованої температури. В процесі безперервної зміні температури реєстрація сигналів температури і додаткових сигналів частоти вібрації, амплітуди збудження і амплітуди квадратури забезпечується за достатньо короткий час, наприклад, 1 сек., за який зміна температури не значна і масштабний коефіцієнт гіроскопа є 1 UA 111408 C2 5 10 15 20 25 30 35 40 постійним. Дійсно, нехай швидкість зміни температури дорівнює 3 °C/мін (це тепловий удар), тоді зміна температури за час 1 сек. дорівнюватиме 3/60=0.05 °C. При такій малій зміні температури масштабний коефіцієнт гіроскопа залишиться практично незмінним. При необхідності можна зменшити час реєстрації сигналів до 0.1 с, проте у більшості застосувань 1 с є достатньою. Підвищення точності температурної компенсації масштабного коефіцієнта гіроскопа забезпечується за рахунок додаткових вимірювань сигналів частоти вібрації, амплітуди збудження і амплітуди квадратури, які забезпечують повніший і точніший опис змін масштабного коефіцієнта вібраційного гіроскопа особливо при зміні температури, враховуючи погрішності, які виникають при розузгодженні фаз сигналів управління, а також змін коефіцієнтів підсилення електродів збудження вібрації та знімання інформації про вібрацію. Додаткові сигнали вводяться в модель масштабного коефіцієнта у вигляді полінома, а для визначення коефіцієнтів полінома використовується метод множинної регресії, який дозволяє отримувати стійкі оцінки коефіцієнтів за наявності шуму у вимірюваних сигналах. Способи компенсації температурної погрішності масштабного коефіцієнта (МК) вібраційного гіроскопа, що заявляються у відомих джерелах інформації не виявлені, що дозволяє вважати їх новими. Відміни ознаки в своїй сукупності є необхідними і достатніми для досягнення поставленої задачі, в інших відомих технічних рішеннях по компенсації погрішності МК не виявлені, що забезпечує їм відповідність критерію "винахідницький рівень". Введення у відомий спосіб додаткових сигналів, що вимірюються при безперервної зміні температури, у вигляді поліноміальної моделі, коефіцієнти якої обчислюються методом множинної регресії, дозволяє реалізувати запропонований спосіб компенсації температурної погрішності МК вібраційного гіроскопа, підвищити його точність та зменшити час калібрування коефіцієнтів моделі. На фіг. 1 зображені графіки вимірів МК вібраційного гіроскопа (верхній графік) на стабільних температурах за способом прототипу і профіль температур (нижній графік), включаючи зміни температури зі швидкістю 1 °C/хв. На фіг. 2 представлені крива 1 вимірів МК гіроскопа кожну секунду за способом, що заявляється і три значення МК (помічені колами), що апроксимуються параболою, обчисленні за способом прототипу. Фіг. 3 показує погрішність компенсації МК у відсотках за способом прототипу в процесі зміни температури. На фіг. 4 представлені крива 1 вимірів МК кожну секунду без інтервалів стабільної температури і крива 2, що є розрахункова крива, отримана по моделі, запропонованій в заявлюваному способі. На фіг. 5 представлені погрішність компенсації МК (верхній графік) за запропонованим способом і профіль температур без інтервалів стабільної температури (нижній графік). Суть способу полягає в наступному. Вихідний сигнал гіроскопа Vвих. записується наступним виразом: Vвих.=MK×Ω+V0, 45 де МК є масштабний коефіцієнт, Ω є фіксована кутова швидкість, що вимірюється, V0 є зміщення нуля гіроскопа. Звідси витікає, що MK 50 (1) Vв их V0 , (2) якщо не враховувати другий доданок у правій частині рівняння (2), тобто зміщення нуля, то виникає методична погрішність. Для гіроскопів грубої точності зміщення нуля, виражена в розмірності кутової швидкості, може досягати 250 град./г, тоді відносна методична погрішність визначення МК при обертанні з кутової швидкістю 100 град./с=360000 град./г дорівнює MK 250 7 10 4 0.07 % . MK 360000 (3) 2 UA 111408 C2 5 10 15 20 25 30 35 40 45 50 55 60 Ця методична погрішність в даному випадку означає, що погрішність компенсації МК може бути тільки більше 0.07 %. Для більшості застосувань гіроскопів грубої точності, наприклад, такі, які є на даний час більшість вібраційних мікромеханічних гіроскопів, цілком достатня для більшості застосувань. Якщо треба збільшити нижню границю точності компенсації МК, то при тестуванні гіроскопа слід обертати його зі швидкістю більш ніж 100 град./с, наприклад 200 град./с, 300 град./с і так далі, до максимальної кутової швидкості динамічного діапазону конкретного гіроскопа, що калібрується. Для гіроскопів середньої та високої точності, у яких динамічний діапазон не більше 100 град./г, слід спочатку провести калібрування та компенсацію зміщення нуля, а потім калібрування МК. Після компенсації зміщення нуля до значень 15 град./г та менше, нижня границя погрішності -5 компенсації МК дорівнює 15/360000≈4×10 =0.004 %. Для подальшого зменшення нижньої границі слід враховувати проекцію кутової швидкості Землі на вісь чутливості гіроскопа. Зазвичай, при калібруванні гіроскоп установлюють на горизонтальний поворотний стіл в термокамері так, що його вісь чутливості лежить у вертикальній площині і гіроскоп вимірює як додаток вертикальну компоненту кутової швидкості обертання Землі, яка на широті φ м. Києва, приблизно дорівнює 15sinφ≈11 град./г. Це значення треба віднімати з показань гіроскопа, зменшуючи методичну погрішність. В цьому випадку нижню границю методичної погрішності компенсації МК можна довести до 0.001 % і менше. Однак на практиці значення 0.004 % задовольняє більшості застосувань гіроскопів. На фіг. 1 представлені результати вимірів МК вібраційного гіроскопа з металевим циліндричним резонатором в діапазоні зовнішніх температур (температури термокамери) [-40+75]°С при швидкості зміни температури 1 °C/хв і обертанні гіроскопа з кутовою швидкістю 200 град./с за способом прототипу. Вимірювання температури (нижній графік) проводилося датчиком, який розміщувався на електронній платі гіроскопа тому, із-за нагріву платі в процесі роботи гіроскопа інтервал температур усередині гіроскопа змістився на 6-7 °C у бік великих значень, тобто перетворився в діапазон [-32+81]°С. Як видно з фіг. 1, щоб виміряти МК гіроскопа у 5 точках різних температур, треба 9.4 години часу. Проте, при використанні способу, що пропонується, який не вимагає стабілізацію температури на кожному фіксованому її значенні для виміру МК, знадобилося б всього 4.4 години, тобто більш ніж у 2 рази менше часу. Якщо зменшити кількість точок з 5 до 3 (25, -40, 85) С, як приведено у таблиці 1 опису прототипу [4], то знадобиться 6.8 годин, тоді для пропонованого способу знадобиться 3.8 годин, тобто у 1.8 разу менше. Для порівняння точності компенсації температурної погрішності МК, на фіг. 2 представлені крива 1 вимірів МК гіроскопа кожну секунду за способом, що заявляється і три значення МК (на графіці фіг. 2 помічені колами), що апроксимуються параболою, обчисленні за способом прототипу. У цих вимірах кутова швидкість обертання гіроскопа дорівнює 200 град/с, зміщення нуля віднімалося з вимірів гіроскопа і, таким чином, методична погрішність МК не перевищувала 0.004 %. Як видно з фіг. 2 на стабілізованих температурах значення МК порівнюваними способами практично рівні між собою, проте при зміні температури, коли діють градієнти температур, значення МК істотно відрізняються. Якщо бути точнішим, то інформація про МК за способом прототипу в процесі зміни температури є відсутня, але при апроксимації трьох точок поліноміальною моделлю (крива 2) другого порядку (параболою), як представлено в описі прототипу, погрішність компенсації буде значною. Ця погрішність у відсотках представлена на графіки фіг. 3 і для негативних температур досягає 2 %, а середньоквадратична погрішність (СКП) в діапазоні температур дорівнює 0.6 %. Крім того, при вимірах за запропонованим способом, награфіку фіг. 2 видно гістерезис МК, який добре відомий фахівцям і проявляється завжди для будь-якого гіроскопа. Гістерезис проявляється через те, що МК змінюється по різному при нагріві і охолодженні на одному і тому ж інтервалі температур. При цьому утворюється гістерезисна петля, яку можна бачити на кривої 1 (фіг. 2) і якої немає на кривій 2 (фіг. 2) що додає погрішність, яку не можливо скорегувати моделлю прототипу. Спосіб, що пропонується дає можливість використовувати багатопараметричні моделі компенсації (корекції) температурних погрішностей МК гіроскопа. Як затверджувалося вище, МК гіроскопа залежить не тільки безпосередньо від температури, але і від інших параметрів, таких як резонансна частота, амплітуда збудження, амплітуда квадратури. Безпосередньо температура, датчик якої знаходиться, як правило, на електронній платі може характеризувати вклад в погрішність МК від температурних змін коефіцієнтів підсилення операційних підсилювачів, ємностей, резисторів та інших електронних компонентів. Таким чином, приймаючи, наприклад, поліноміальну модель залежності МК від додатково вимірюваних параметрів, запишемо наступну модель: 3 UA 111408 C2 MK i MK 0 5 10 n1 n2 n3 n4 i11 i2 1 i3 1 i4 1 fi1Fi F0 i1 ai2 A i A 0 i2 qi3 Qi Q0 i3 t i4 Ti T0 i4 , i 1...n , (4) де MK i , Fi , A i , Q i , Ti , i 1...n , є виміри масштабного коефіцієнту, резонансної частоти резонатора, амплітуди збудження, амплітуди квадратури і температури вібраційного гіроскопа, відповідно, a n є кількість вимірів; F0 , A 0 , Q0 , T0 є опорні значення відповідних параметрів, які установлюються заздалегідь, деякі з яких можуть дорівнювати нулю; MK 0 є скаляр, що може оцінюватися по результатах вимірів, чи може бути встановлений заздалегідь, наприклад, MK 0 0 ; f , a , q , t є вектори коефіцієнтів моделі розмірності n1, n2, n3, n4, відповідно, які треба оцінювати по результатах вимірів. Для оцінювання векторів коефіцієнтів моделі і можливо значення MK 0 по результатах вимірів використовуємо метод множинної регресії: MK 0 MK 1 f a MTM 1MT , MK q n t (5) де М є матриця вимірів наступного виду: 15 1 F F n1 A A n2 1 1 1 1 M 1 Fn Fnn1 A n A nn2 20 25 30 35 40 Q1 Q1n3 Qn Q1n3 T1 T1n4 ; Tn Tnn4 (6) де ΔFi=Fi - F0; ΔAi=Ai - A0; ΔQi=Qi - Q0; ΔTi=Ti - T0; i=1…n; На фіг. 4 представлені дві криві: крива 1 є вимірі МК кожну секунду в діапазоні температур без інтервалів стабільної температури, а крива 2 є розрахункова крива, отримана по моделі (4), коефіцієнти якої були обчислені за методом множинної регресії (формули (5), (6)), для наступних параметрів моделі: n1=n2=n3=n4=3; F0=4997.2 Гц, A0=Q0=T0=0; МК0=0; n=13700 сек. ≈ 3.8 години. Були отримані наступні коефіцієнти моделі: f [1.700242615 e 003; 2.976025407 e 004; 7.122442518 e 006 ] ; a [1.458135322 e 001; 1.600507013 e 001;5.998178800 e 002] ; q [2.170774963 e 003; 8.307483746 e 003;1.263000670 e 001] ; t [1.391987095 e 004; 3.999467597 e 008;1.079528890 e 008 ] . Різниця між кривими 1 і 2 фіг. 4 визначає погрішність компенсації МК. Графік цієї різниці, тобто погрішності компенсації МК, від часу представлений на верхньому графіку фіг. 5, а на нижньому графіку цієї фігури представлений температурний профіль без інтервалів стабільної температури. Середньоквадратична погрішність компенсації за запропонованою моделлю в діапазоні температур дорівнює 0.057 %, що у 10 разів менше, ніж за способом прототипу (0.6 %, бач фіг. 3), і за час, що в 1.8 разу менше, ніж за способом прототипу (6.8 годин проти 3.8 годин). Слід зазначити, що замість поліноміальної моделі зазначеного вище типу, можуть використовуватися моделі, складені з поліномів Лежандра, Лагера, Чебишева та інші, або експоненціальні, полігармонічні та інші, які можуть бути нелінійними відносно оцінюваних параметрів і, в цьому випадку, використовувати метод нелінійної регресії для їх оцінки. Опис способу, що реалізує конкретну модель, лише пояснює винахід, що заявляється і не обмежується тільки ним. Будь - яка модифікація вказаних тут методів і моделей, що забезпечують компенсацію погрішностей масштабного коефіцієнта, зберігаючи суть та зміст цього винаходу як, наприклад, реалізація блоків в аналоговому, цифровому або іншому вигляді, повинна інтерпретуватися як така, яка відповідає відмітній частині формули винаходу. 4 UA 111408 C2 5 10 15 20 25 30 Таким чином, показано досягнення мети винаходу і доведені істотні переваги пропонованого технічного рішення в порівнянні з прототипом. Джерела інформації: 1. И.М. Окон "Способ калибровки коэффициента масштабирования гиродатчика угловой скорости или осесимметричного вибрационного гироскопа". Номер заявки PCT/RU/2011/000806, дата публ. 18 квіт. 2013, номер публ. WO2013055253 А1. 2. Jose Betia "Method for temperature compensated gyrometric measurement and gyrometric device using same". - US Patent № 7707885 B2, G01 С 19/56, 4 May 2010. 3. Жан Руа Ален, Рено Ален, Карон Жан - Мишель "Способ калибровки масштабного коэффициента осесимметричного вибрационного гиродатчика угловой скорости". - РФ Патент № 2400707 C1, G01 С 19/56, G 01P 21/00, опубл. 27.09.2010, публ. РСТ WO 2008/0902. 4. Harvey Weinberg "Calibration iMEMS gyroscopes". - AN- 1049 Application note. - Analog devices Inc., 2009 (http://www.analog.com/static/imported - tiles/application notes/AN- 1049.pdf) ФОРМУЛА ВИНАХОДУ 1. Спосіб компенсації температурної погрішності масштабного коефіцієнта вібраційного гіроскопа, який полягає в тому, що вимірюють вихідний сигнал гіроскопа, що відповідає звісній постійній кутовій швидкості і температурі гіроскопа у не менше, ніж двох фіксованих значеннях температури, обчисленні калібрувальних значень коефіцієнтів температурної моделі і компенсації температурної погрішності з використанням обчислених коефіцієнтів, який відрізняється тим, що додатково вимірюють сигнали частоти вібрації, амплітуди збудження і амплітуди квадратури при безперервній зміні температури в робочому діапазоні температур, обчислюють додаткові калібрувальні значення коефіцієнтів моделі, які відповідають додатковим вимірюваним сигналам і доповнюють компенсацію температурної погрішності масштабного коефіцієнта. 2. Спосіб за п. 1, який відрізняється тим, що використовується поліноміальна модель температурної залежності масштабного коефіцієнта від сигналів, що додатково вимірюються. 3. Спосіб за п. 2, який відрізняється тим, що калібрувальні коефіцієнти моделі обчислюються методом множинної регресії. 5 UA 111408 C2 6 UA 111408 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of compensation of temperature error of scaling coefficient of vibratory gyroscope
Автори англійськоюMaliarov Serhii Prokopovych, Tsiruk Viktor Hryhorovych, Chikovani Valerii Valerianovych, Petrenko Oleksii Volodymyrovych
Назва патенту російськоюСпособ компенсации температурной погрешности масштабного коэффициента вибрационного гироскопа
Автори російськоюМаляров Сергей Прокофьевич, Цирук Виктор Григорьевич, Чиковани Валерий Валерианович, Петренко Алексей Владимирович
МПК / Мітки
МПК: G01C 19/56
Мітки: коефіцієнта, масштабного, температурної, вібраційного, погрішності, гіроскопа, спосіб, компенсації
Код посилання
<a href="https://ua.patents.su/9-111408-sposib-kompensaci-temperaturno-pogrishnosti-masshtabnogo-koeficiehnta-vibracijjnogo-giroskopa.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації температурної погрішності масштабного коефіцієнта вібраційного гіроскопа</a>
Спосіб компенсації температурної залежності тензочутливості

Номер патенту: 95398
Опубліковано: 25.12.2014
Автори: Лях-Кагуй Наталія Степанівна, Кутраков Олексій Петрович, Дружинін Анатолій Олександрович
МПК: G01K 7/22
Мітки: тензочутливості, залежності, спосіб, температурної, компенсації
Формула / Реферат:
Спосіб компенсації температурної залежності тензочутливості шляхом використання тензорезисторів і компенсатора у вимірювальній схемі, який відрізняється тим, що як компенсатор використовують два компенсуючі тензорезистори, які попередньо деформують, вмикають у відокремлене від тензорезисторів вимірювальне коло, з подальшим розділенням вихідних сигналів і нормуванням вихідної величини.
Спосіб температурної компенсації тензометричних пристроїв
Номер патенту: 18203
Опубліковано: 15.11.2006
Автори: Черепащук Григорій Олександрович, Потильчак Олексій Петрович
МПК: G01B 13/00, G01L 5/04
Мітки: спосіб, пристроїв, тензометричних, температурної, компенсації
Формула / Реферат:
Спосіб температурної компенсації тензометричних пристроїв, що полягає у внесенні до виміряного значення поправки, яку визначають по відомій залежності температурної похибки від температури тензоперетворювача пристрою, яку вимірюють термоперетворювачем, розміщеним поблизу тензоперетворювача, який відрізняється тим, що для розрахунку поправки використовують усталені значення вимірюваної величини та температури, які розраховують обчислювальним...
Циліндричний чутливий елемент коріолісового вібраційного гіроскопа
Номер патенту: 79166
Опубліковано: 25.05.2007
Автори: Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович, Яценко Юрій Олексійович
МПК: G01C 19/56
Мітки: циліндричний, чутливий, елемент, вібраційного, коріолісового, гіроскопа
Формула / Реферат:
Циліндричний чутливий елемент вібраційного коріолісового гіроскопа, що складається з циліндричного стакана, закріпленого на круглій мембрані, защемленій по її зовнішньому контуру, який відрізняється тим, що нижня частина циліндричного стакана виконана меншої товщини, а на круглій мембрані виконані 8 отворів, які розташовані симетрично по колу через 45 градусів, вузол кріплення виконаний в вигляді циліндричного стакана, вивернутого всередину...
Резонатор коріолісового вібраційного гіроскопа
Номер патенту: 97938
Опубліковано: 26.03.2012
Автори: Возненко Вікторія Віталіївна, Цирук Віктор Григорович, Бондарук Всеволод Арсенійович, Пономаренко Анатолій Іванович, Маляров Сергій Прокопович, Янкелевич Григорій Євсійович
МПК: G01P 9/00, G01C 19/56
Мітки: коріолісового, гіроскопа, вібраційного, резонатор
Формула / Реферат:
Резонатор коріолісового вібраційного гіроскопа, що містить циліндричне кільце та підвіс, а також нижню панель, яка з'єднана з кільцем за допомогою підвісу, який має отвори, що розділені перетинками, на яких розташовані п'єзоелектричні елементи, який відрізняється тим, що отвори виконані подовженими, такими, що проходять крізь підвіс до внутрішнього торця кільця, формуючи перетинки підвісу.
Резонатор коріолісового вібраційного гіроскопа

Номер патенту: 106173
Опубліковано: 25.07.2014
Автори: Янкелевич Григорій Євсійович, Возненко Вікторія Віталіївна, Пономаренко Анатолій Іванович
МПК: G01C 19/56, G01C 19/04
Мітки: вібраційного, гіроскопа, коріолісового, резонатор
Формула / Реферат:
Резонатор коріолісового вібраційного гіроскопа, що містить циліндричне кільце, нижню панель, яка з'єднується з кільцем за допомогою перетинок, на яких розташовані п'єзоелектричні елементи, який відрізняється тим, що площини п'єзоелектричних елементів, якими вони закріплюються на перетинках, паралельні осі симетрії циліндричної поверхні кільця.
Попередній патент: Спосіб одержання інтеркальованого графіту та пристрій для його здійснення
Наступний патент: Спосіб переробки пташиного посліду з отриманням органічного добрива та біогазу та біореактор для його реалізації
Випадковий патент: Похідна ванна