Силовий електромеханічний привід
Формула / Реферат
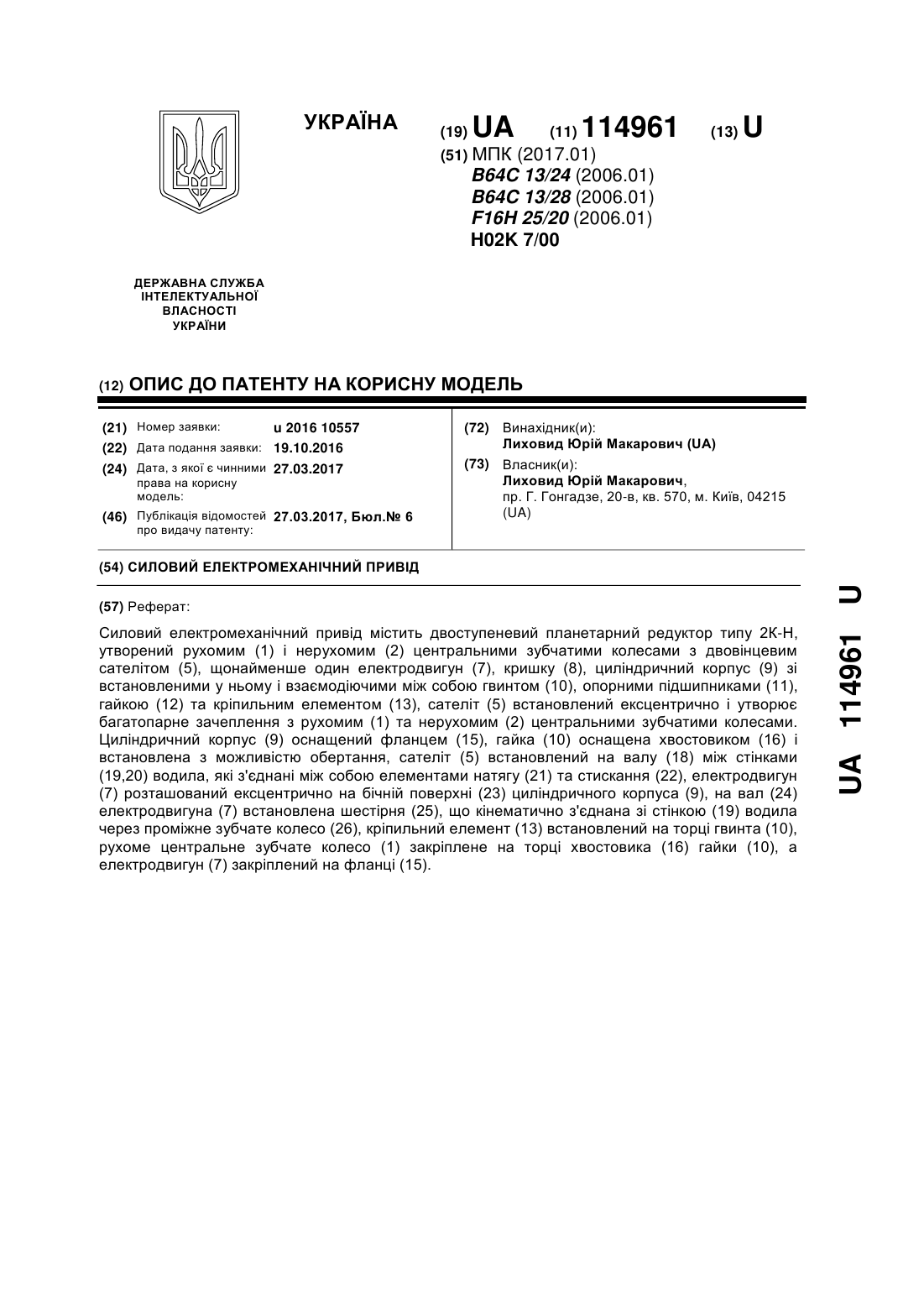
1. Силовий електромеханічний привід, що містить двоступеневий планетарний редуктор типу 2К-Н, утворений рухомим (1) і нерухомим (2) центральними зубчатими колесами з двовінцевим сателітом (5), щонайменше один електродвигун (7), кришку (8), циліндричний корпус (9) зі встановленими у ньому і взаємодіючими між собою гвинтом (10), опорними підшипниками (11), гайкою (12) та кріпильним елементом (13), сателіт (5) встановлений ексцентрично і утворює багатопарне зачеплення з рухомим (1) та нерухомим (2) центральними зубчатими колесами, який відрізняється тим, що циліндричний корпус (9) оснащений фланцем (15), гайка (10) оснащена хвостовиком (16) і встановлена з можливістю обертання, сателіт (5) встановлений на валу (18) між стінками (19,20) водила, які з'єднані між собою елементами натягу (21) та стискання (22), електродвигун (7) розташований ексцентрично на бічній поверхні (23) циліндричного корпуса (9), на вал (24) електродвигуна (7) встановлена шестірня (25), що кінематично з'єднана зі стінкою (19) водила через проміжне зубчате колесо (26), кріпильний елемент (13) встановлений на торці гвинта (10), рухоме центральне зубчате колесо (1) закріплене на торці хвостовика (16) гайки (10), а електродвигун (7) закріплений на фланці (15).
2. Силовий електромеханічний привід за п. 1, який відрізняється тим, що між гайкою (12) та гвинтом (10) розташовані тіла кочення (28), наприклад у формі сталевих кульок, а хвостовик (16) виконано порожнистим.
3. Силовий електромеханічний привід за п. 1, який відрізняється тим, що стінки (19, 20) водила виконані асиметричними і разом з елементами стискання (21) та натягу (22) виконують функції балансира.
4. Силовий електромеханічний привід за п. 1, який відрізняється тим, що гвинт (10) розташований по обидва боки корпуса (9) та за межами кришки (8).
5. Силовий електромеханічний привід за п. 1, який відрізняється тим, що довжина гвинта (10) перевищує розміри гайки (12) на порядок і більше.
6. Силовий електромеханічний привід за п. 1, який відрізняється тим, що на бічній поверхні (29) циліндричного корпуса (9) встановлено закріплений на фланці (15) додатковий електродвигун (30), який кінематично взаємодіє з проміжним зубчатим колесом (26) через окрему шестірню (31).
7. Силовий електромеханічний привід за п. 1, який відрізняється тим, що проміжне зубчате колесо (26) виконано як одне ціле зі стінкою (19) водила.
8. Силовий електромеханічний привід за п. 1, який відрізняється тим, що між стінками (19, 20) водила розташований щонайменше один додатковий сателіт (32), що виконує функції балансира і утворює багатопарне зачеплення з рухомим (1) та нерухомим (2) центральними зубчатими колесами.
9. Силовий електромеханічний привід за п. 1, який відрізняється тим, що сателіт (5, 32) виконано одновінцевим.
Текст
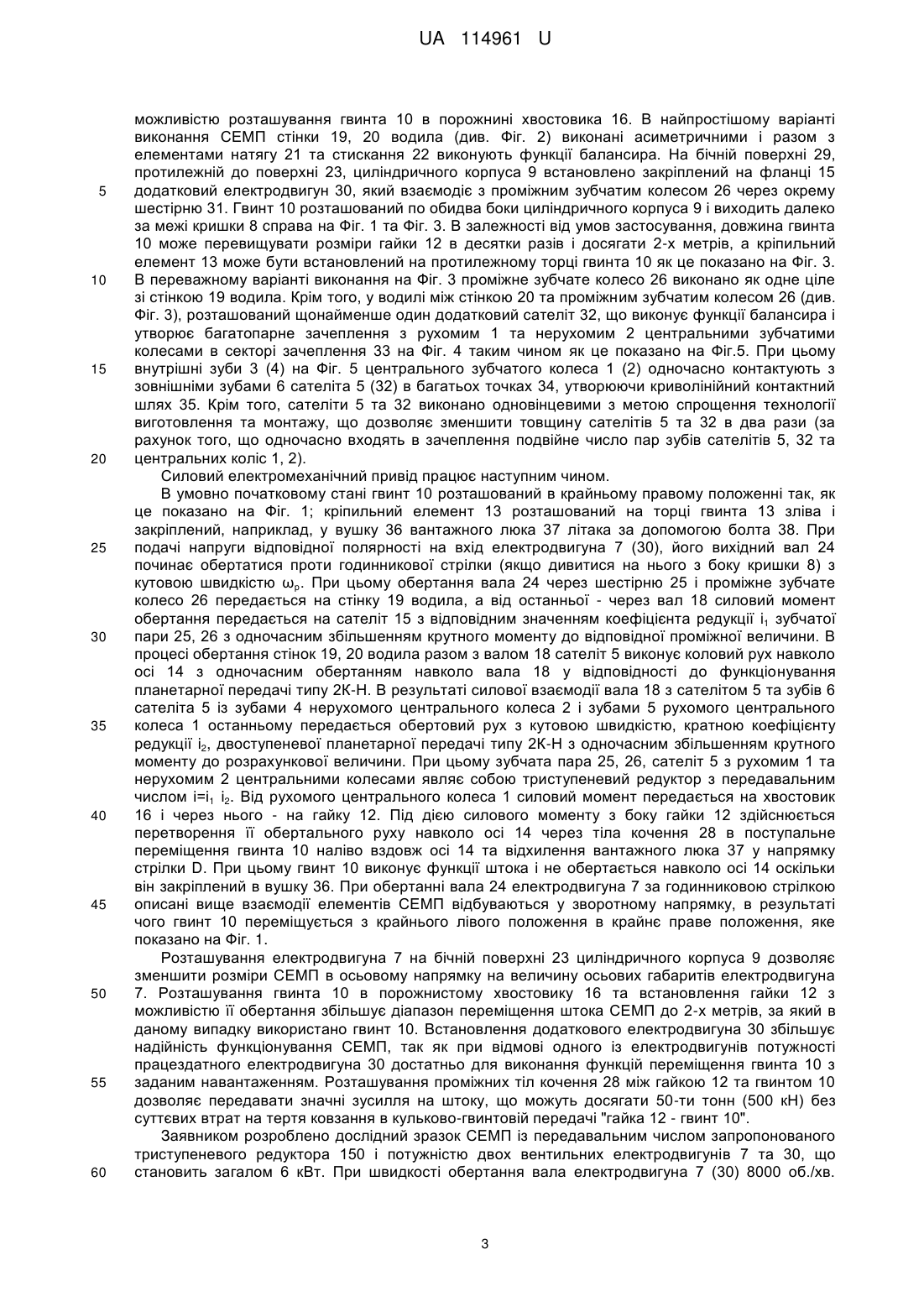
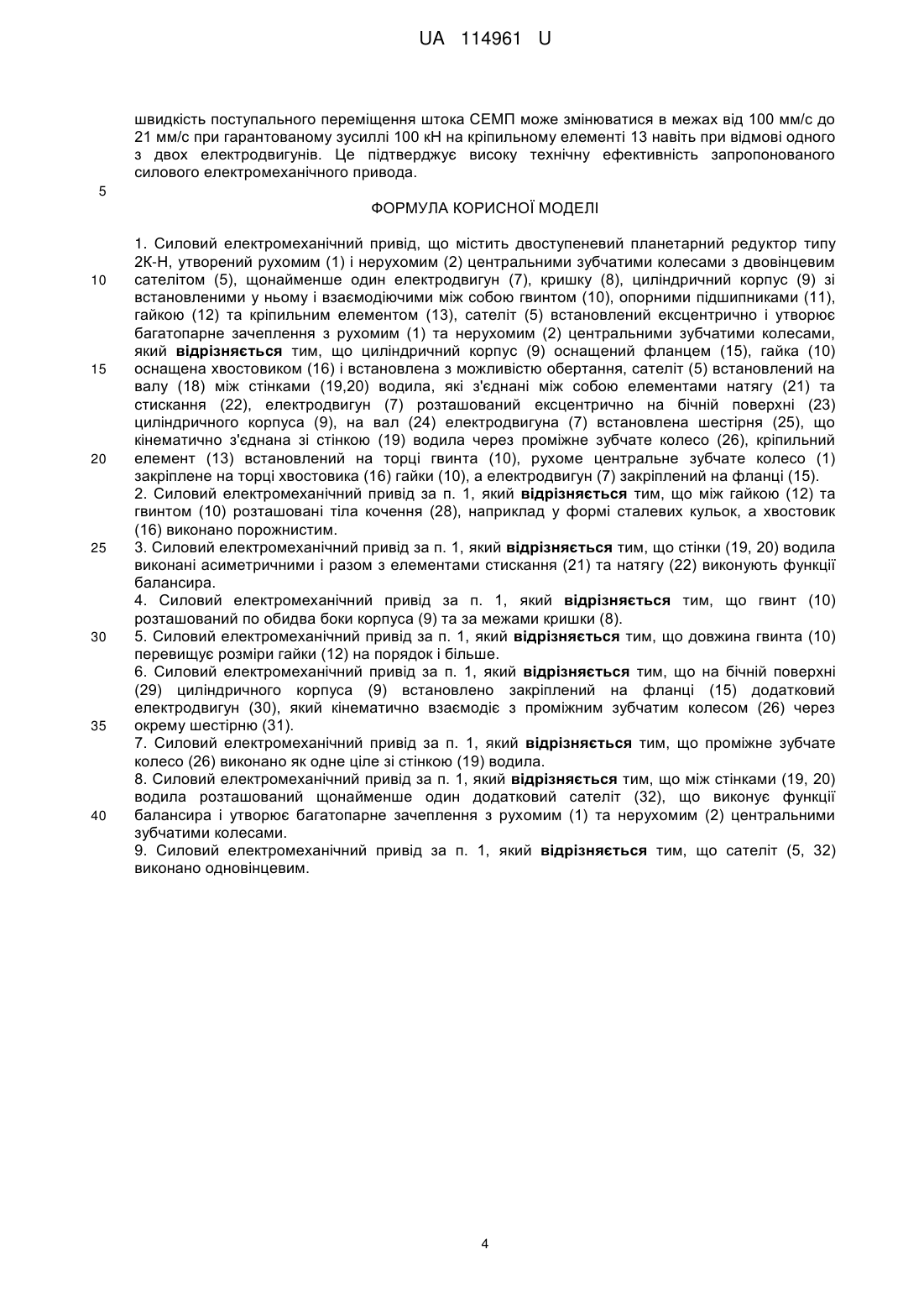
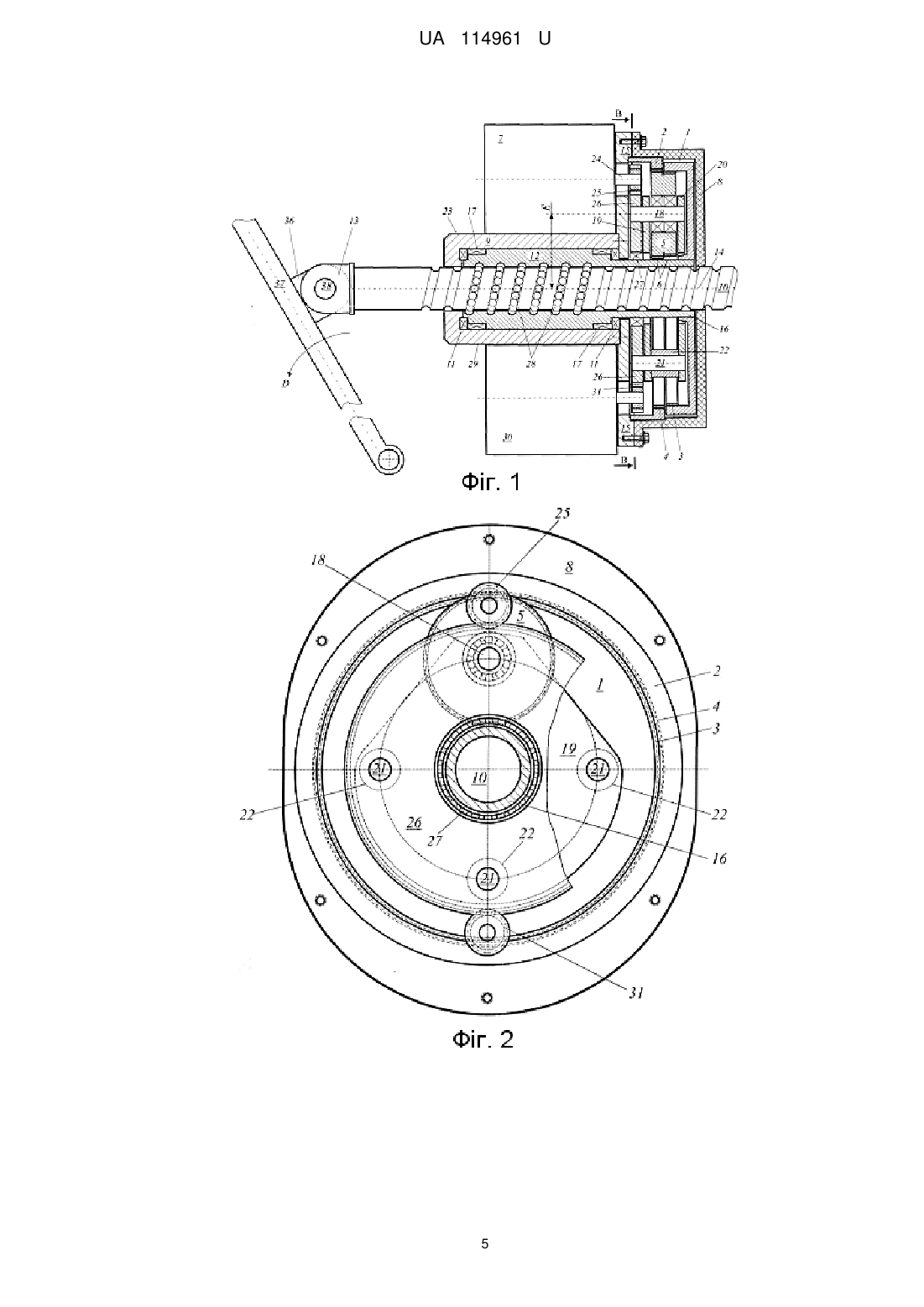
Реферат: Силовий електромеханічний привід містить двоступеневий планетарний редуктор типу 2К-Н, утворений рухомим (1) і нерухомим (2) центральними зубчатими колесами з двовінцевим сателітом (5), щонайменше один електродвигун (7), кришку (8), циліндричний корпус (9) зі встановленими у ньому і взаємодіючими між собою гвинтом (10), опорними підшипниками (11), гайкою (12) та кріпильним елементом (13), сателіт (5) встановлений ексцентрично і утворює багатопарне зачеплення з рухомим (1) та нерухомим (2) центральними зубчатими колесами. Циліндричний корпус (9) оснащений фланцем (15), гайка (10) оснащена хвостовиком (16) і встановлена з можливістю обертання, сателіт (5) встановлений на валу (18) між стінками (19,20) водила, які з'єднані між собою елементами натягу (21) та стискання (22), електродвигун (7) розташований ексцентрично на бічній поверхні (23) циліндричного корпуса (9), на вал (24) електродвигуна (7) встановлена шестірня (25), що кінематично з'єднана зі стінкою (19) водила через проміжне зубчате колесо (26), кріпильний елемент (13) встановлений на торці гвинта (10), рухоме центральне зубчате колесо (1) закріплене на торці хвостовика (16) гайки (10), а електродвигун (7) закріплений на фланці (15). UA 114961 U (54) СИЛОВИЙ ЕЛЕКТРОМЕХАНІЧНИЙ ПРИВІД UA 114961 U UA 114961 U 5 10 15 20 25 30 35 40 45 50 55 60 Технічне рішення належить до області машинобудування і призначене для переміщення або регулювання положення вузлів і механізмів в системах управління, наприклад літаків (привід випуску шасі, привід вантажних люків тощо), у силових приводах рухомих частин робототехнічних комплексів, роботизованих навантажувачів та підйомників як альтернатива потужним гідравлічним циліндрам. Відомі технічні рішення, що належать до систем управління літаків (патенти US № 6828322 від 07.04.2003, US № 7007897 від 23.06.2004, ЕР № 1964771 від 27.02.2008). Система управління кожним аеродинамічним елементом включає гідравлічний або пневматичний та електромеханічний привід. Недолік такої системи управління - використання на літаку для управління аеродинамічною поверхнею як мінімум двох систем генерування і розподілу енергії електричної та гідравлічної (пневматичної) систем, оснащених аналогічними за функціональним призначенням пристроями. Для заміщення пневматичних систем в літаках застосовують відомий силовий міні-привід (патент RU № 2532238 від 10.01.2007; заявка WO № 2108/085082 А1 від 12.07.2007), що складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною та торцевими частинами, двоступеневої хвильової передачі зі вхідним валом, з'єднаним з ротором електродвигуна; сепаратора першого ступеня хвильової передачі з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними відносно хвилеутворювача у жорсткому колесі, другий сепаратор з розміщеними в ньому в кілька рядів тілами кочення, переміщуваними кільцями, надітими на ексцентрично розташовані на жорсткому колесі поверхні; вихідного вала, що спирається на тіла кочення і підшипники кочення; стопорного пристрою, статор якого з двома парами постійних магнітів і обмоток жорстко з'єднаний з корпусом. Недолік відомого силового міні-приводу у великій інерційності порожнистого ротора великого діаметра, всередині якого розміщений ексцентриковий вузол, сепаратор і частина жорсткого колеса першого ступеня хвильового редуктора. Порожнистий ротор хвильової передачі постійно деформується в процесі його роботи. Цей фактор обмежує величину прискорення ротора і не дозволяє забезпечити підвищену керованість об'єктів, що приводяться таким електромеханічним приводом. Крім того, силовий міні-привід має надзвичайно складну конструкцію, що суттєво знижує надійність та довговічність його функціонування і призводить до необхідності застосування аварійного роз'єднувача вихідного вала й об'єкта, що ним приводиться в рух. Найбільш близьким до запропонованого технічного рішення є електромеханічний осьовий привід варіатора, що містить двоступеневий планетарний редуктор типу 2К-Н, утворений рухомим і взаємодіючими із ним через сателіт нерухомим центральними зубчатими колесами, циліндричний корпус якого з'єднаний по торцях з електродвигуном, встановленими в корпусі і взаємодіючими між собою гвинтом, двома опорними підшипниками і гайкою, що виконана як одне ціле з порожнистим штоком із кріпильним елементом на торці, і поздовжнім пазом на зовнішній поверхні, що входить у зачеплення з закріпленою на корпусі приводу шпонкою, рухоме центральне зубчате колесо редуктора закріплене на торці гвинта, взаємодіючого з нерухомим зубчатим колесом через двовінцевий сателіт, що утворює з центральними колесами багатопарне зачеплення, і встановлений через підшипник та ексцентрикову втулку з внутрішнім шпонковим пазом на швидкохідний вал; опорні підшипники гвинта встановлені в корпусі редуктора і стягнуті в осьовому напрямку кільцевим виступом корпуса приводу з розміщеним у ньому кільцевим ущільненням, гайка має по всій своїй довжині зовнішній кільцевий виступ із поздовжнім пазом, а в корпусі привода на довжині твірної його внутрішньої поверхні виконано поздовжній паз із встановленою в ньому шпонкою, яка взаємодіє з кільцевим виступом гайки, при цьому швидкохідний вал встановлено консольно у виконану на торці гвинта циліндричну порожнину на двох спарених підшипниках, між якими та ексцентриковою втулкою розміщений балансир, вал електродвигуна встановлений у ексцентрикову втулку і з'єднаний з нею і зі швидкохідним валом спільною шпонкою, на торці корпуса приводу встановлена кришка з сальниковим ущільненням, що взаємодіє з зовнішньою циліндричною поверхнею штока, а в кріпильному елементі штока встановлено сферичний підшипник, сполучений віссю з нарізною вилкою (патент України № 52774 від 15.01.2003, Бюл № 1, 2003 p.). Відома конструкція забезпечує переміщення штока у обмеженому діапазоні - не більше 100 мм, - та відзначається значними габаритами у напрямку осі штока, складністю двоступеневого редуктора, наявністю великої кількості додаткових елементів та технологічних етапів обробки, що ускладнюють монтаж та виготовлення (балансир, ексцентрикова втулка, двовінцеві сателіти, кільцевий виступ гайки із поздовжнім пазом, шпилька, швидкохідний вал, встановлений консольно у виконану на торці гвинта циліндричну порожнину на двох спарених підшипниках). Крім того, наявність одного електродвигуна суттєво зменшує надійність функціонування такого 1 UA 114961 U 5 10 15 20 25 30 35 40 45 50 55 60 електромеханічного приводу. Все це разом з великою вагою обмежує застосування відомого електромеханічного приводу в авіаційній техніці та в силових робототехнічних системах. В основу корисної моделі поставлено задачу зменшити розміри пристрою в напрямку осі штока, збільшити діапазон переміщення штока, підвищити коефіцієнт корисної дії та надійність функціонування, зокрема за рахунок можливості "гарячого" резервування роботи пристрою декількома електродвигунами. Поставлена задача вирішується в силовому електромеханічному приводі, що містить двоступеневий планетарний редуктор типу 2К-Н, утворений рухомим і нерухомим центральними зубчатими колесами з двовінцевим сателітом, щонайменше один електродвигун, кришку, циліндричний корпус зі встановленими у ньому і взаємодіючими між собою гвинтом, опорними підшипниками, гайкою та кріпильним елементом, сателіт встановлений ексцентрично і утворює багатопарне зачеплення з рухомим та нерухомим центральними зубчатими колесами, згідно з пропозицією, циліндричний корпус оснащений фланцем, гайка оснащена хвостовиком і встановлена з можливістю обертання, сателіт встановлений на валу між стінками водила, які з'єднані між собою елементами натягу та стискання, електродвигун розташований ексцентрично на бічній поверхні циліндричного корпуса, на вал електродвигуна встановлена шестірня, що кінематично з'єднана зі стінкою водила через проміжне зубчате колесо, кріпильний елемент встановлений на торці гвинта, рухоме центральне зубчате колесо закріплене на торці хвостовика гайки, а електродвигун закріплений на фланці. Крім того, згідно з пропозицією, між гайкою та гвинтом розташовані тіла кочення, наприклад у формі сталевих кульок, а хвостовик гайки виконано порожнистим. Крім того, згідно з пропозицією, стінки водила виконані асиметричними і разом з елементами стискання та натягу виконують функції балансира. Крім того, згідно з пропозицією, гвинт розташований по обидва боки корпуса та за межами кришки. Крім того, згідно з пропозицією, довжина гвинта перевищує розміри гайки на порядок і більше. Крім того, згідно з пропозицією, на бічній поверхні циліндричного корпуса встановлено закріплений на фланці додатковий електродвигун, який кінематично взаємодіє з проміжним зубчатим колесом через окрему шестірню. Крім того, згідно з пропозицією, проміжне зубчате колесо виконано як одне ціле зі стінкою водила. Крім того, згідно з пропозицією, між стінками водила розташований щонайменше один додатковий сателіт, що виконує функції балансира і утворює багатопарне зачеплення з рухомим та нерухомим центральними зубчатими колесами. Крім того, згідно з пропозицією, сателіт виконано одновінцевим. Технічне рішення пояснюється Фіг. 1, 2, 3, 4, 5 де на Фіг. 1 подано розріз загального вигляду силового електромеханічного приводу; на Фіг. 2 вигляд А-А Фіг. 1; на Фіг. 3 показано варіант конструкції з додатковим сателітом; на Фіг. 4 показано вигляд В-В Фіг. 3; на Фіг. 5 - профіль зубів при багатопарному зачепленні сателіта з центральним колесом. На Фіг. 1 та 2 силовий електромеханічний привід (СЕМП) містить двоступеневий планетарний редуктор типу 2К-Н, утворений рухомим 1 і нерухомим 2 центральними зубчатими колесами, що мають внутрішні зуби відповідно 3 та 4; двовінцевим сателітом 5 з зовнішніми зубами 6, щонайменше один електродвигун 7, кришку 8, циліндричний корпус 9 зі встановленими у ньому і взаємодіючими між собою гвинтом 10, опорними підшипниками 11, гайкою 12 та кріпильним елементом 13, сателіт 5 встановлений ексцентрично на відстані Е від осі 14 симетрії гвинта 10 і утворює багатопарне зачеплення (див. фіг. 5) з рухомим 1 та нерухомим 2 центральними зубчатими колесами; циліндричний корпус 9 оснащений фланцем 15, гайка 12 оснащена хвостовиком 16 і встановлена з можливістю обертання в голчастих підшипниках 17, сателіт 5 встановлений на валу 18 між стінками 19 та 20 водила, які з'єднані між собою елементами натягу 21 (наприклад, шпилькою) та стискання 22 у формі дистанційної втулки, електродвигун 7 розташований ексцентрично на бічній поверхні 23 циліндричного корпуса 9, на вал 24 електродвигуна 7 встановлена шестірня 25, кінематично з'єднана зі стінкою 19 водила через проміжне зубчате колесо 26, що обертається в підшипнику 27, кріпильний елемент 13 встановлений на торці гвинта 10, рухоме центральне зубчате колесо 1 закріплене на торці хвостовика 16, а електродвигун 7 закріплений на фланці 15. Крім того, між гайкою 12 та гвинтом 10 розташовані тіла кочення 28, наприклад сталеві загартовані кульки для зменшення тертя в процесі обертання гайки 12 навколо гвинта 10, а хвостовик 16 виконано порожнистим з 2 UA 114961 U 5 10 15 20 25 30 35 40 45 50 55 60 можливістю розташування гвинта 10 в порожнині хвостовика 16. В найпростішому варіанті виконання СЕМП стінки 19, 20 водила (див. Фіг. 2) виконані асиметричними і разом з елементами натягу 21 та стискання 22 виконують функції балансира. На бічній поверхні 29, протилежній до поверхні 23, циліндричного корпуса 9 встановлено закріплений на фланці 15 додатковий електродвигун 30, який взаємодіє з проміжним зубчатим колесом 26 через окрему шестірню 31. Гвинт 10 розташований по обидва боки циліндричного корпуса 9 і виходить далеко за межі кришки 8 справа на Фіг. 1 та Фіг. 3. В залежності від умов застосування, довжина гвинта 10 може перевищувати розміри гайки 12 в десятки разів і досягати 2-х метрів, а кріпильний елемент 13 може бути встановлений на протилежному торці гвинта 10 як це показано на Фіг. 3. В переважному варіанті виконання на Фіг. 3 проміжне зубчате колесо 26 виконано як одне ціле зі стінкою 19 водила. Крім того, у водилі між стінкою 20 та проміжним зубчатим колесом 26 (див. Фіг. 3), розташований щонайменше один додатковий сателіт 32, що виконує функції балансира і утворює багатопарне зачеплення з рухомим 1 та нерухомим 2 центральними зубчатими колесами в секторі зачеплення 33 на Фіг. 4 таким чином як це показано на Фіг.5. При цьому внутрішні зуби 3 (4) на Фіг. 5 центрального зубчатого колеса 1 (2) одночасно контактують з зовнішніми зубами 6 сателіта 5 (32) в багатьох точках 34, утворюючи криволінійний контактний шлях 35. Крім того, сателіти 5 та 32 виконано одновінцевими з метою спрощення технології виготовлення та монтажу, що дозволяє зменшити товщину сателітів 5 та 32 в два рази (за рахунок того, що одночасно входять в зачеплення подвійне число пар зубів сателітів 5, 32 та центральних коліс 1, 2). Силовий електромеханічний привід працює наступним чином. В умовно початковому стані гвинт 10 розташований в крайньому правому положенні так, як це показано на Фіг. 1; кріпильний елемент 13 розташований на торці гвинта 13 зліва і закріплений, наприклад, у вушку 36 вантажного люка 37 літака за допомогою болта 38. При подачі напруги відповідної полярності на вхід електродвигуна 7 (30), його вихідний вал 24 починає обертатися проти годинникової стрілки (якщо дивитися на нього з боку кришки 8) з кутовою швидкістю ωр. При цьому обертання вала 24 через шестірню 25 і проміжне зубчате колесо 26 передається на стінку 19 водила, а від останньої - через вал 18 силовий момент обертання передається на сателіт 15 з відповідним значенням коефіцієнта редукції i1 зубчатої пари 25, 26 з одночасним збільшенням крутного моменту до відповідної проміжної величини. В процесі обертання стінок 19, 20 водила разом з валом 18 сателіт 5 виконує коловий рух навколо осі 14 з одночасним обертанням навколо вала 18 у відповідності до функціонування планетарної передачі типу 2К-Н. В результаті силової взаємодії вала 18 з сателітом 5 та зубів 6 сателіта 5 із зубами 4 нерухомого центрального колеса 2 і зубами 5 рухомого центрального колеса 1 останньому передається обертовий рух з кутовою швидкістю, кратною коефіцієнту редукції і2, двоступеневої планетарної передачі типу 2К-Н з одночасним збільшенням крутного моменту до розрахункової величини. При цьому зубчата пара 25, 26, сателіт 5 з рухомим 1 та нерухомим 2 центральними колесами являє собою триступеневий редуктор з передавальним числом і=і1 і2. Від рухомого центрального колеса 1 силовий момент передається на хвостовик 16 і через нього - на гайку 12. Під дією силового моменту з боку гайки 12 здійснюється перетворення її обертального руху навколо осі 14 через тіла кочення 28 в поступальне переміщення гвинта 10 наліво вздовж осі 14 та відхилення вантажного люка 37 у напрямку стрілки D. При цьому гвинт 10 виконує функції штока і не обертається навколо осі 14 оскільки він закріплений в вушку 36. При обертанні вала 24 електродвигуна 7 за годинниковою стрілкою описані вище взаємодії елементів СЕМП відбуваються у зворотному напрямку, в результаті чого гвинт 10 переміщується з крайнього лівого положення в крайнє праве положення, яке показано на Фіг. 1. Розташування електродвигуна 7 на бічній поверхні 23 циліндричного корпуса 9 дозволяє зменшити розміри СЕМП в осьовому напрямку на величину осьових габаритів електродвигуна 7. Розташування гвинта 10 в порожнистому хвостовику 16 та встановлення гайки 12 з можливістю її обертання збільшує діапазон переміщення штока СЕМП до 2-х метрів, за який в даному випадку використано гвинт 10. Встановлення додаткового електродвигуна 30 збільшує надійність функціонування СЕМП, так як при відмові одного із електродвигунів потужності працездатного електродвигуна 30 достатньо для виконання функцій переміщення гвинта 10 з заданим навантаженням. Розташування проміжних тіл кочення 28 між гайкою 12 та гвинтом 10 дозволяє передавати значні зусилля на штоку, що можуть досягати 50-ти тонн (500 кН) без суттєвих втрат на тертя ковзання в кульково-гвинтовій передачі "гайка 12 - гвинт 10". Заявником розроблено дослідний зразок СЕМП із передавальним числом запропонованого триступеневого редуктора 150 і потужністю двох вентильних електродвигунів 7 та 30, що становить загалом 6 кВт. При швидкості обертання вала електродвигуна 7 (30) 8000 об./хв. 3 UA 114961 U швидкість поступального переміщення штока СЕМП може змінюватися в межах від 100 мм/с до 21 мм/с при гарантованому зусиллі 100 кН на кріпильному елементі 13 навіть при відмові одного з двох електродвигунів. Це підтверджує високу технічну ефективність запропонованого силового електромеханічного привода. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 35 40 1. Силовий електромеханічний привід, що містить двоступеневий планетарний редуктор типу 2К-Н, утворений рухомим (1) і нерухомим (2) центральними зубчатими колесами з двовінцевим сателітом (5), щонайменше один електродвигун (7), кришку (8), циліндричний корпус (9) зі встановленими у ньому і взаємодіючими між собою гвинтом (10), опорними підшипниками (11), гайкою (12) та кріпильним елементом (13), сателіт (5) встановлений ексцентрично і утворює багатопарне зачеплення з рухомим (1) та нерухомим (2) центральними зубчатими колесами, який відрізняється тим, що циліндричний корпус (9) оснащений фланцем (15), гайка (10) оснащена хвостовиком (16) і встановлена з можливістю обертання, сателіт (5) встановлений на валу (18) між стінками (19,20) водила, які з'єднані між собою елементами натягу (21) та стискання (22), електродвигун (7) розташований ексцентрично на бічній поверхні (23) циліндричного корпуса (9), на вал (24) електродвигуна (7) встановлена шестірня (25), що кінематично з'єднана зі стінкою (19) водила через проміжне зубчате колесо (26), кріпильний елемент (13) встановлений на торці гвинта (10), рухоме центральне зубчате колесо (1) закріплене на торці хвостовика (16) гайки (10), а електродвигун (7) закріплений на фланці (15). 2. Силовий електромеханічний привід за п. 1, який відрізняється тим, що між гайкою (12) та гвинтом (10) розташовані тіла кочення (28), наприклад у формі сталевих кульок, а хвостовик (16) виконано порожнистим. 3. Силовий електромеханічний привід за п. 1, який відрізняється тим, що стінки (19, 20) водила виконані асиметричними і разом з елементами стискання (21) та натягу (22) виконують функції балансира. 4. Силовий електромеханічний привід за п. 1, який відрізняється тим, що гвинт (10) розташований по обидва боки корпуса (9) та за межами кришки (8). 5. Силовий електромеханічний привід за п. 1, який відрізняється тим, що довжина гвинта (10) перевищує розміри гайки (12) на порядок і більше. 6. Силовий електромеханічний привід за п. 1, який відрізняється тим, що на бічній поверхні (29) циліндричного корпуса (9) встановлено закріплений на фланці (15) додатковий електродвигун (30), який кінематично взаємодіє з проміжним зубчатим колесом (26) через окрему шестірню (31). 7. Силовий електромеханічний привід за п. 1, який відрізняється тим, що проміжне зубчате колесо (26) виконано як одне ціле зі стінкою (19) водила. 8. Силовий електромеханічний привід за п. 1, який відрізняється тим, що між стінками (19, 20) водила розташований щонайменше один додатковий сателіт (32), що виконує функції балансира і утворює багатопарне зачеплення з рухомим (1) та нерухомим (2) центральними зубчатими колесами. 9. Силовий електромеханічний привід за п. 1, який відрізняється тим, що сателіт (5, 32) виконано одновінцевим. 4 UA 114961 U 5 UA 114961 U 6 UA 114961 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 13/28, B64C 13/24, F16H 25/20, H02K 7/00
Мітки: електромеханічний, привід, силовий
Код посилання
<a href="https://ua.patents.su/9-114961-silovijj-elektromekhanichnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Силовий електромеханічний привід</a>
Електромеханічний осьовий привід варіатора
Номер патенту: 67002
Опубліковано: 17.07.2006
Автори: Власов Іван Петрович, Цепур Леонід Іванович
МПК: F16H 25/20, F16H 9/26, A01D 69/00, F16H 25/00
Мітки: варіатора, електромеханічний, привід, осьовий
Формула / Реферат:
Висівний апарат сівалки, що містить прямокутний конусоподібний бункер для насіння з одним отвором на його задній стінці, роторний щітковий механізм усередині бункера й один поворотний висівний диск з отворами різного розміру, що встановлений із зовнішньої сторони на задній стінці бункера, який відрізняється тим, що бункер для насіння має два поворотних висівних диски з отворами різного розміру, що встановлені із зовнішніх боків на задній і...
Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання
Номер патенту: 43505
Опубліковано: 17.12.2001
Автори: Мозолевич Олександр Миколайович, Бєліков Віктор Трифонович, Потапов Олександр Володимирович, Васильєв Валерій Валентинович
МПК: A63B 24/00
Мітки: блок, електромеханічний, тренажерного, терапевтичного, обладнання, програмно-керований, силовий
Формула / Реферат:
1. Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання що містить в собі навантажувальний пристрій, виконаний у вигляді електродвигуна, блок керування навантаженням, датчики зворотного зв'язку і керований перетворювач, котрі підключені до незалежного джерела живлення, який відрізняється тим, що електродвигун, виконаний з розімкненою магнітною системою, має висококоерцитивні постійні магніти, трикутні...
Привід електромеханічний
Номер патенту: 102640
Опубліковано: 10.11.2015
Автори: Чуйко Віктор Андрійович, Романуша Володимир Олександрович
МПК: F16H 61/00
Мітки: привід, електромеханічний
Формула / Реферат:
Привід електромеханічний, що містить редуктор з кількаступеневою зубчатою передачею та електродвигун фланцевого виконання, встановлений на корпусі редуктора, з роторною шестірнею на валу, який відрізняється тим, що статор двигуна з'єднаний з корпусом редуктора муфтою реактивного моменту кручення з пружними елементами передачі його на корпус.
Електромеханічний осьовий привід варіатора
Номер патенту: 63458
Опубліковано: 17.07.2006
Автор: Власов Іван Петрович
МПК: F16H 9/26, F16H 25/00, A01D 69/00, F16H 25/20
Мітки: привід, електромеханічний, осьовий, варіатора
Формула / Реферат:
1. Спосіб екстракційного вилучення мікрокількостей рутенію (III) при сумісній присутності з паладієм (II), родієм (ПІ) та кольоровими металами, який включає утворення комплексних сполук цих металів з органічними реагентами, послідовне вилучення екстрагуванням органічним розчинником спочатку сполук паладію та кольорових металів, а потім сполук рутенію, вимірювання оптичної густини екстрактів, за якими визначають вміст Ru(III), який...
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини
Номер патенту: 49720
Опубліковано: 16.09.2002
Автори: Бєліков Віктор Трифонович, Ярмолюк Вадим Михайлович
МПК: G09B 9/04
Мітки: гусеничної, силовий, блок, багатокоординатного, тренажера, машини, електромеханічний
Формула / Реферат:
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини, що містить основу, на якій встановлений двокоординатний електричний привід горизонтальних переміщень та обертів з опорною платформою трьох розташованих симетрично по колу механізмів вертикального підйому, на кінцевих опорних вузлах яких шарнірно закріплена верхня площадка з кабіною, в якій знаходиться місце оператора, який відрізняється тим, що на шляховій...
Попередній патент: Спосіб діагностики індивідуальної стадії готовності пацієнта до змін окремих складових моделі нездорової поведінки
Наступний патент: Електромеханічний осьовий привід
Випадковий патент: Спосіб прискореної витримки винного дистиляту