Спосіб вимірювання відстані до об’єкта (варіанти) та автомобільний пасивний оптичний пристрій для його реалізації
Формула / Реферат
1. Спосіб вимірювання відстані до об'єкта для використання в автомобільному пасивному оптичному пристрої, який включає:
(а) створення в обчислювальному пристрої бази даних множини n об'єктів, які часто зустрічаються в полі зору спостерігача або об'єктива камери, при русі автомобіля з номерами і від 1 до n, та множини m характерних деталей цих об'єктів з номерами j від 1 до m, які мають відомі розміри по ширині хij або по висоті уij;
(б) вимірювання реальної ширини а, реальної висоти b і відстані s від детектора зображень, розташованого в салоні автомобіля, до щонайменше одного контрольного об'єкта, розташованого на кузові автомобіля або який є частиною кузова автомобіля, і занесення цих даних в базу даних обчислювального пристрою;
(в) фіксацію зображення об'єкта, відстань Si до якого вимірюють разом із зображенням щонайменше одного контрольного об'єкта шириною а, висотою b, і відстань s до якого від детектора зображень відома, і занесення в базу даних обчислювального пристрою;
(г) порівняння зображення об'єкта із зображеннями об'єктів з бази даних обчислювального пристрою і виділення на об'єкті щонайменше однієї характерної деталі, розмір по ширині хij або по висоті уij якої є в базі даних;
(д) вимірювання на зображенні ширини x0 або висоти у0 щонайменше однієї характерної деталі об'єкта з бази даних, яка має відомі розміри по довжині хij або по висоті уij і ширину а0 або висоту b0 контрольного об'єкта;
(e) обчислення відстані Si до об'єкта за формулою:
Si = s▪(a0/x0)-( хij/a)
або
Si = s▪(b0/y0)-(yij/b).
2. Спосіб вимірювання відстані до об'єкта, який включає:
(а) на рівній прямолінійній ділянці дороги вимірювання і занесення до бази даних обчислювального пристрою відстані R від детектора зображень, розташованого в салоні автомобіля, до полотна дороги по прямій лінії, що з'єднує центр об'єктива детектора, верхню точку контрольного об'єкта на капоті автомобіля і полотно дороги;
(б) фіксування зображення ділянки полотна дороги разом з характерними елементами полотна і/або з нанесеними на полотно дороги елементами дорожньої розмітки, розміри яких і/або відстані між якими по горизонталі залишаються незмінними на значних по довжині ділянках дороги, разом із зображенням щонайменше одного контрольного об'єкта ширина а, і відстань s до якого від детектора зображень відома і занесена в базу даних обчислювального пристрою;
(в) вимірювання на зафіксованому зображенні ширини L0 характерного елемента полотна дорожнього покриття і/або ширини L0 елемента дорожньої розмітки та/або відстані L0 між елементами дорожньої розмітки по умовній горизонтальній лінії, що проходить по верхньому краю зображення контрольного об'єкта, і ширини а0 контрольного об'єкта;
(г) при появі в полі зору детектора зображень об'єкта, відстань S до якого вимірюється, фіксування його зображення, разом із зображенням характерних елементів полотна дороги і/або нанесених на полотно дороги елементів дорожньої розмітки;
(д) вимірювання на зафіксованому зображенні об'єкта, відстань до якого вимірюється, ширини L1 характерного елемента полотна дорожнього покриття і/або ширини L1 елемента дорожньої розмітки, і/або відстані U по горизонталі між елементами дорожньої розмітки по умовній горизонтальній лінії, що проходить по нижньому краю об'єкта;
(e) обчислювання відстані S до об'єкта за формулою:
S = R(L0/L1).
3. Автомобільний пасивний оптичний пристрій для вимірювання відстані до об'єкта для здійснення способу за одним із пунктів 1, 2 який містить:
(а) обчислювальний пристрій з базою даних множини n об'єктів, які часто зустрічаються в полі зору спостерігача або об'єктива камери, при русі автомобіля з номерами і від 1 до n, та множини m характерних деталей цих об'єктів з номерами j від 1 до m, які мають відомі розміри по довжині хij або по висоті уij;
(б) щонайменше один детектор зображень, розташований переважно у верхній передній частині салону за переднім склом автомобіля;
(в) щонайменше один контрольний об'єкт, який або є елементом кузова автомобіля, або розташований на кузові автомобіля довжиною а, висотою b і відстань s до якого від детектора зображень відомі.
Текст
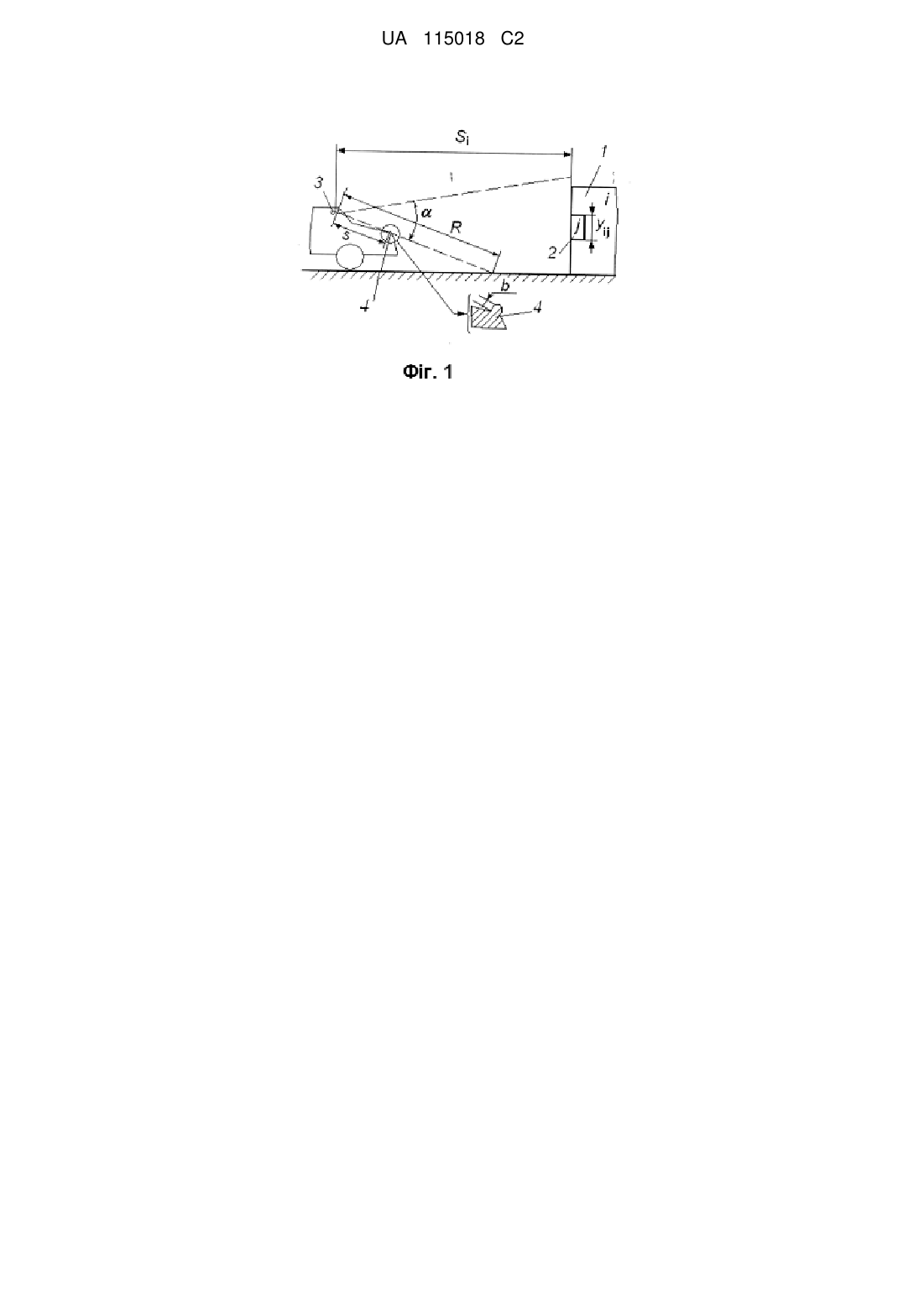
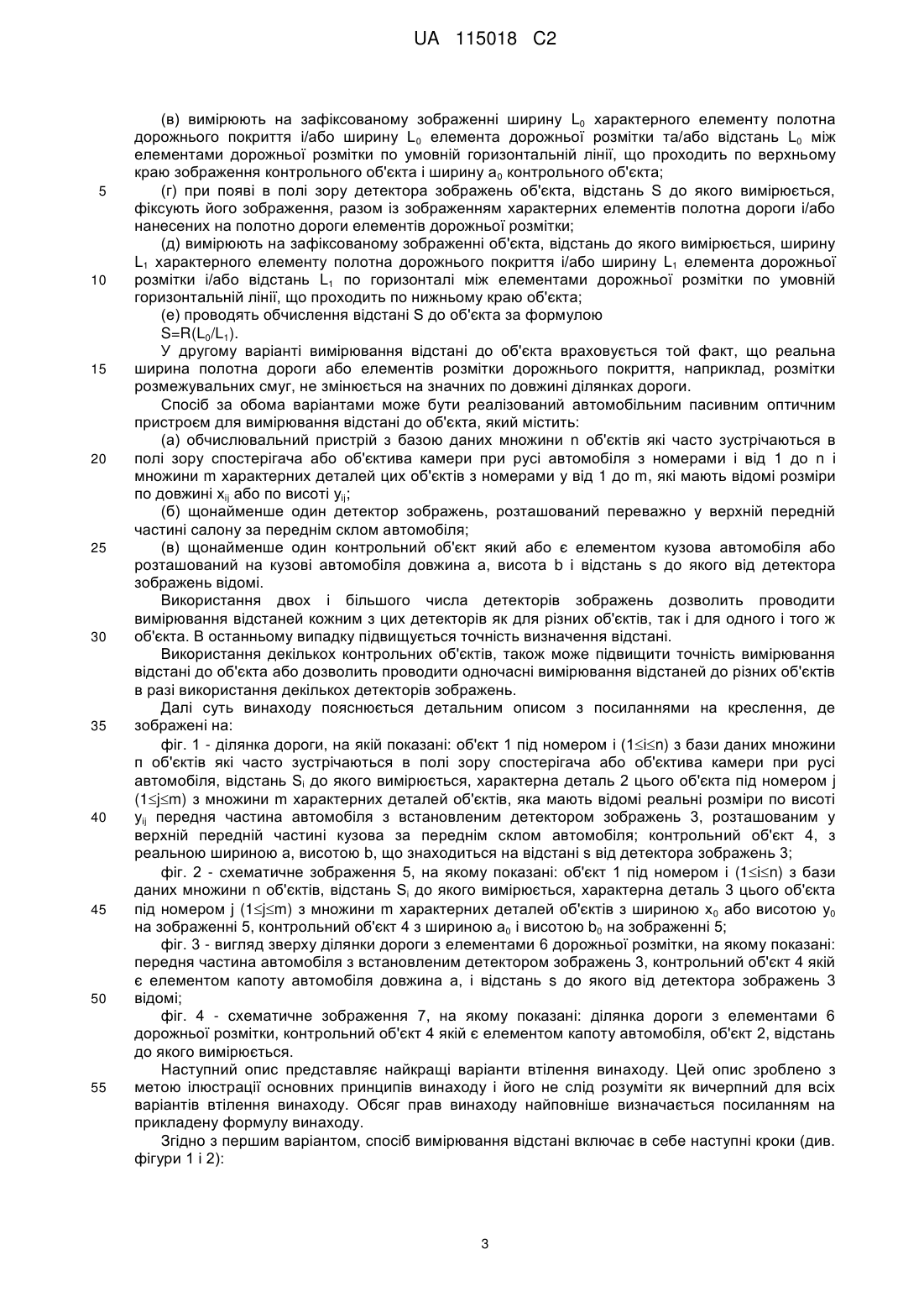
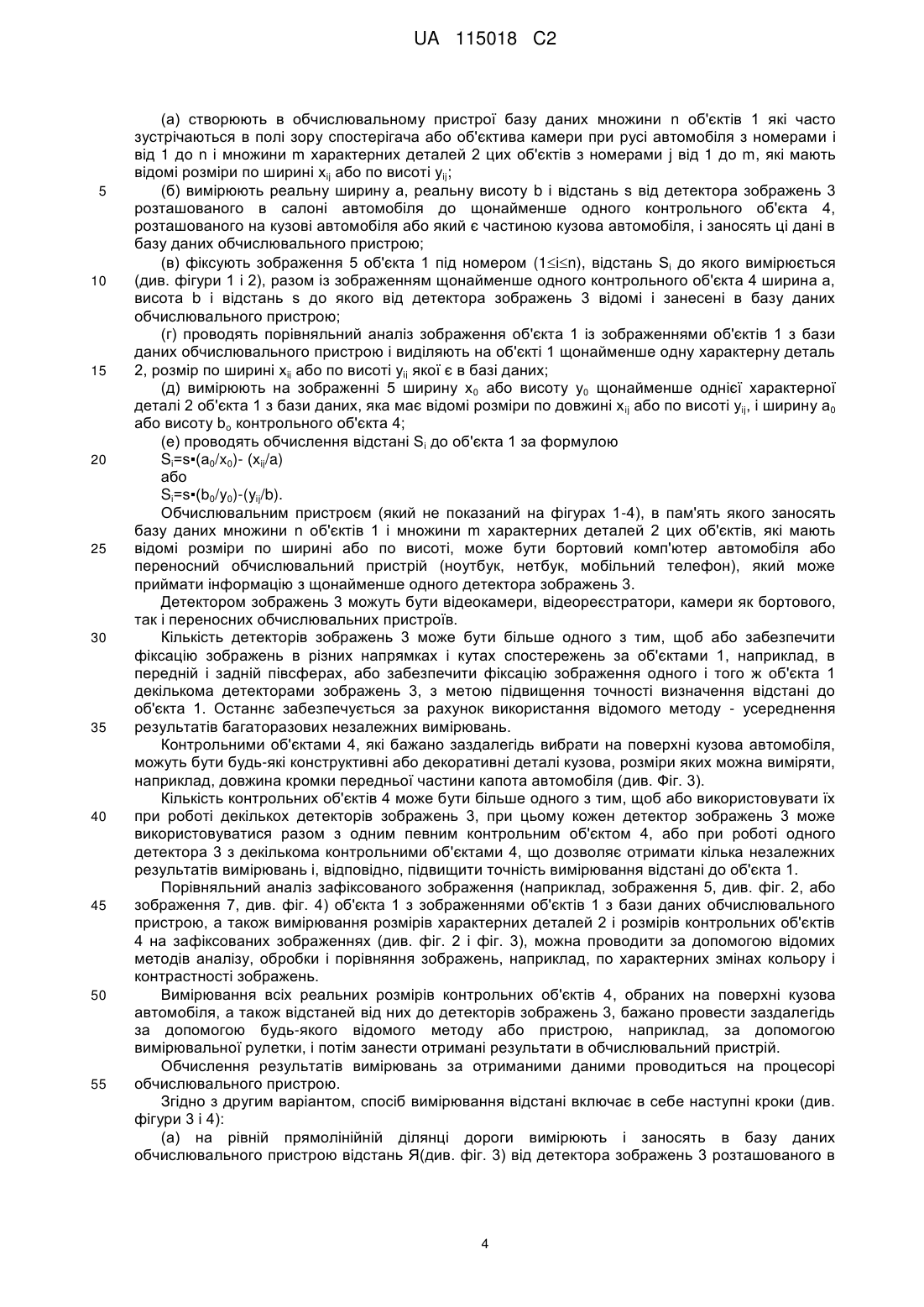
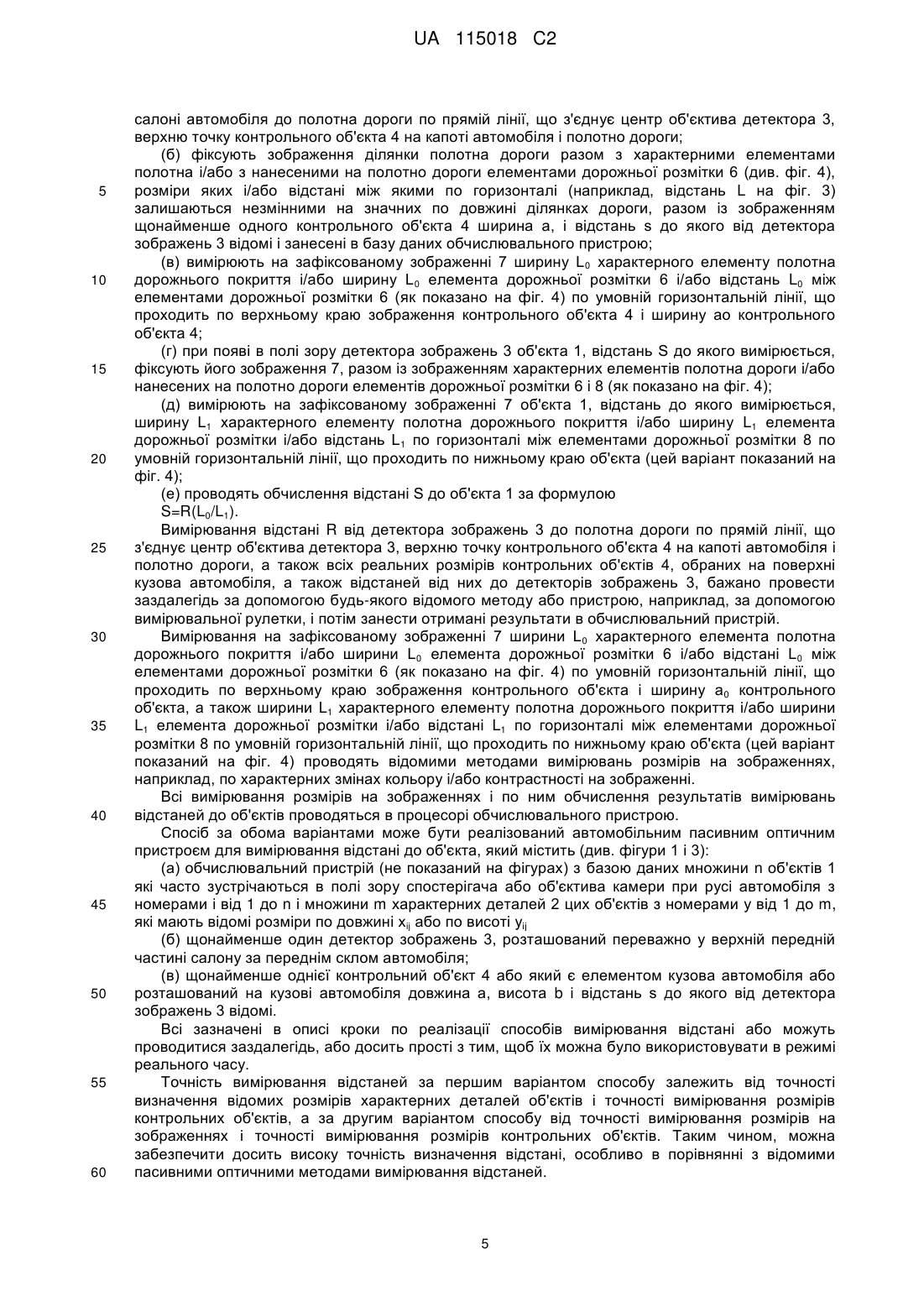
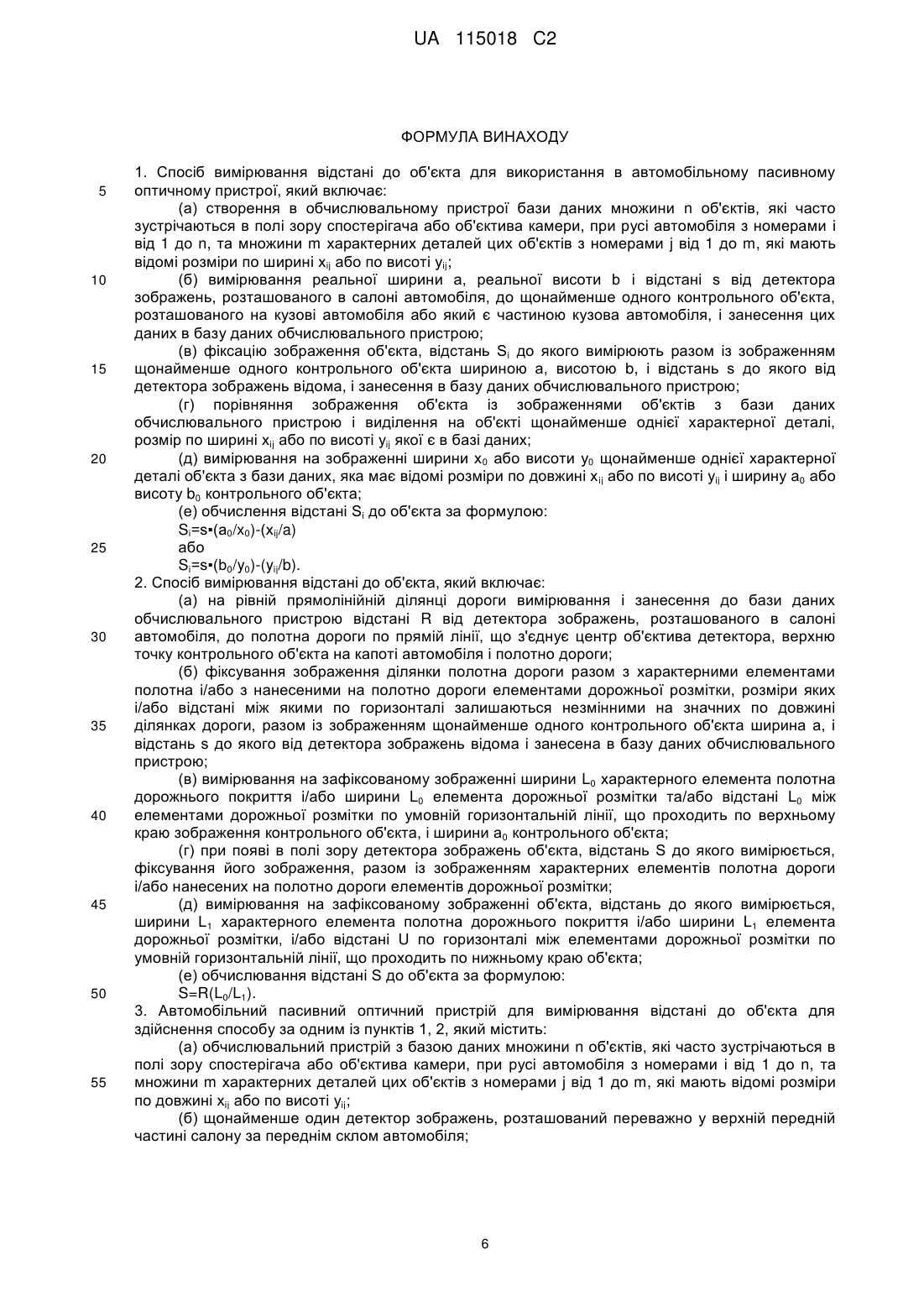
Реферат: Спосіб вимірювання відстані до об'єкта для використання в автомобільному пасивному оптичному пристрою. Спосіб полягає в створенні бази даних об'єктів, які часто зустрічаються в полі зору спостерігача або об'єктива камери, при русі автомобіля і характерних деталей цих об'єктів, які мають відомі розміри по ширині або по висоті; вимірюванні розмірів контрольного об'єкта і відстані від нього до детектора зображень; фіксуванні зображення об'єкта разом із зображенням контрольного об'єкта; порівнянні зображення об'єкта з зображеннями з бази даних; вимірюванні на зображенні розмірів характерної деталі об'єкта і розмірів контрольного об'єкта; обчисленні відстані до об'єкта. Наведений другий варіант способу, який полягає в вимірюванні відстані від детектора зображень до полотна дороги; фіксуванні зображення ділянки полотна дороги з її характерними елементами разом із зображенням контрольного об'єкта; вимірюванні на зображенні розмірів характерних елементів полотна дорожнього покриття; фіксування зображення об'єкта разом із зображенням характерних елементів полотна дороги, вимірюванні на зображенні розмірів елементів полотна по умовній горизонтальній лінії, що проходить по нижньому краю об'єкта; обчислення відстані до об'єкта. За допомогою пасивного оптичного пристрою, який використовує зазначені вище способи, забезпечується висока точність визначення відстані до об’єкта. UA 115018 C2 (12) UA 115018 C2 UA 115018 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до пасивних оптичних способів і засобів вимірювання відстані до віддалених об'єктів і призначений для підвищення точності визначення відстаней переважно під час руху автомобіля. Відомі різні оптичні системи, способи, засоби і пристрої для вимірювання відстаней до об'єктів, які можна розділити на системи активного і пасивного типу. Активні оптичні способи і пристрої [описані, наприклад, в патенті Японії JP2013124968, дата публікації 24.06.2013, в патентах Російської федерації RU2605628, дата публікації 27.12.2016 і RU2577079, дата публікації 10.03.2016, в заявці на винахід США 20160377719, дата публікації 29.12.2016] використовують явище відбиття світла і вимір часу проходження відбитого сигналу від об'єктів. Недоліком даних рішень є необхідність використовувати додаткове обладнання, що робить дорожчим конструкцію, і не завжди можливо в умовах вже змонтованих систем відеоспостереження. У пасивних оптичних системах відомі кілька методів отримання інформації про відстань до об'єкту. Найбільш поширеними є способи і пристрої, які використовують метод тріангуляції або стереозору, коли проводиться суміщення зображення об'єкта щонайменше з двох точок спостереження (див., наприклад, книгу "Multiple View Geometry in Computer Vision" by Richard Hartley and Andrew Zisserman, Cambridge University Press, March 2004, або опис далекоміра з Європейського патенту ЕР102300054, дата публікації 28.12.2011). У цьому випадку необхідно використовувати або реального спостерігача, який міг би поєднувати зображення, або використовувати систему щонайменше з двох еталонних проекційних камер і спеціальні обчислення. Недоліком таких систем є обмеження в діапазонах вибору відстаней і необхідність великого обсягу обчислень, що ускладнює їх використання в режимі реального часу. Відомі пасивні оптичні системи для вимірювання відстані до об'єкта по розмиттю зображення при заданому русі відеодетектора або при регулюванні фокусу відеодетектора [див., наприклад, статтю: Loktev AA, Loktev DA, "Method of Determining the Distance to the Object by Analyzing its Image Blur", Proceedings of Moscow State University of Civil Engineering, 2015-ro, No. 6, pp. 140-151 (inRussian)], а також при використанні мультіфокусних камер [див., наприклад, опис патенту Японії JP2013205516, дата публікації 07.10.2013]. Недоліками відомих систем є обмеження в діапазонах вибору відстаней, необхідність у великому обсязі обчислень, і недостатня точність вимірювання відстаней. Відомий пасивний спосіб для визначення відстаней між об'єктами, описаний в заявці на винахід Кореї WO/2015/122658, дата публікації 20.08.2015, згідно з яким, відстань між початковою і кінцевою точками обчислюється за допомогою порівняння відеозображень, отриманих від відеокамери, і відеозображень з заздалегідь створеної бази даних. Проводиться вилучення та аналіз характеристик відеозображень об'єктів, переданих користувачеві, порівняння характеристик об'єктів з базою даних, і вибір найбільш схожих образів в базі даних. Недоліком такого технічного рішення є жорстка прив'язка до району, в якому така база даних відеозображень була створена. Відомі пасивні оптичні способи визначення відстаней за допомогою фіксації об'єкта, до якого вимірюється відстань, на відеокадр одночасно із зображенням деталі на об'єкті або виділеного об'єкта, розміри яких заздалегідь відомі. Наприклад, згідно з патентом Російської Федерації RU2470376, дата публікації 20.12.2012, на шляху руху транспортного засобу (ТЗ) розміщують відеокамеру, при появі ТЗ в зоні контролю фіксують відеокадр із зображенням пластини з державним реєстраційним знаком (ГРЗ) на ТЗ. Проводять розпізнавання символів ГРЗ, за якими визначають тип пластини ГРЗ. Вимірюють координати точок (вершин) кутів зображення пластини ГРЗ в системі координат відеокадру, визначають геометричні розміри зображення пластини ГРЗ на відеокадрі в пікселях. У заявленій групі винаходів вимірюється відстань до певної точки ТС, а саме до центру пластини ГРЗ, незалежно від висоти установки відеокамери над автодорогою. Застосування групи винаходів дозволяє підвищити ймовірність ідентифікації ТЗ при виявленні порушення швидкісного режиму. Недоліком такого способу є необхідність точної прив'язки камери до її розташування, необхідність попереднього вимірювання параметрів взаємного розташування відеокамери і об'єкта в площині дороги, що обмежує застосування відомого технічного рішення тільки обраною ділянкою дороги. Найбільш близьким за технічною суттю до заявленої системі є спосіб визначення відстані за допомогою камери описаний в патенті Російської Федерації RU2602729, дата публікації 20.11.2016. Згідно з першим варіантом відомого способу, визначення відстані за допомогою камери включає наступні кроки: отримують принаймні один відеокадр і калібрувальні характеристики камери, далі виділяють і вводять розміри принаймні одного об'єкта, відстань до якого необхідно виміряти, потім визначають відстань до принаймні одного виділеного об'єкту на 1 UA 115018 C2 5 10 15 20 25 30 35 40 45 50 55 підставі калібрувальних характеристик камери. Недоліком такого способу є необхідність обов'язкового калібрування камери по виділеному об'єкту, що або звужує можливості вимірювань тільки зоною вибраного виділеного об'єкта, або призводить до необхідності постійно вибирати нові виділені об'єкти для калібрування камери і вимірювати відстань до них, що ускладнює використання методу в режимі реального часу. В основу винаходу поставлено задачу шляхом зміни складу і послідовності дій, а також зміною складу і взаємного розташування частин створити спосіб вимірювання відстані до об'єкта (варіанти) та автомобільний пасивний оптичний пристрій для його реалізації, які дають можливість вимірювати відстань в режимі реального часу без прив'язки до певної місцевості з підвищеною точністю вимірювання. Ця задача вирішена тим, що згідно з першим варіантом здійснення винаходу, спосіб вимірювання відстані включає в себе наступні кроки: (а) створюють в обчислювальному пристрої базу даних множини n об'єктів які часто зустрічаються в полі зору спостерігача або об'єктива камери при русі автомобіля з номерами i від 1 до n і множини m характерних деталей цих об'єктів з номерами j від 1 до m, які мають відомі розміри по ширині хij або по висоті уij; (б) вимірюють реальну ширину а, реальну висоту b і відстань s від детектора зображень розташованого в салоні автомобіля до щонайменше одного контрольного об'єкта, розташованого на кузові автомобіля або який є частиною кузова автомобіля, і заносять ці дані в базу даних обчислювального пристрою; (в) фіксують зображення об'єкта, відстань Si до якого вимірюється, разом із зображенням щонайменше одного контрольного об'єкта ширина а, висота b і відстань s до якого від детектора зображень відомі і занесені в базу даних обчислювального пристрою; (г) проводять порівняльний аналіз зображення об'єкта із зображеннями об'єктів з бази даних обчислювального пристрою і виділяють на об'єкті щонайменше одну характерну деталь, розмір по ширині хij або по висоті уij якої є в базі даних; (д) вимірюють на зображенні ширину x0 або висоту у0 щонайменше однієї характерної деталі об'єкта з бази даних, яка має відомі розміри по довжині х ij або по висоті уij, і ширину а0 або висоту b0 контрольного об'єкта; (e) проводять обчислення відстані Si до об'єкта за формулою Si=s▪(a0/x0)- (хij/a) або Si=s▪(b0/y0)-(yij/b). Об'єктами для бази даних, які часто зустрічаються в полі зору спостерігача або об'єктива камери при русі автомобіля, можуть бути автотранспортні засоби, дорожні знаки, елементи розмітки на дорогах, технічні будівлі, житлові будинки, люди, тварини та інші об'єкти: Такі об'єкти повинні мати характерні деталі, розміри яких змінюються несуттєво від об'єкта до об'єкта. Наприклад, такими деталями можуть бути габарити вантажних контейнерів контейнеровозів або фур для вантажних перевезень, розміри пластин з державними реєстраційними знаками, розміри дорожніх знаків, висота вікон багатоповерхових будинків, ріст дорослих людей, діаметри і висоти стовпів для дорожнього освітлення і т.п. Контрольним об'єктом з відомими розмірами і відстанню від нього до детектора зображень, може бути будьякий конструктивний або декоративний елемент, наприклад, капота автомобіля, розміри якого можна виміряти. Такий контрольний об'єкт повинен постійно перебувати в полі зору детектора зображень і з'являтися на кадрі при фіксації зображень об'єктів, відстань до яких вимірюється. Виділення характерних деталей на об'єкті, відстань до якого вимірюється, вимір розмірів цих деталей і розмірів контрольного об'єкта на зображенні, і, за цими даними, обчислення відстані до об'єкта може проводитися обчислювальним пристроєм в режимі реального часу. Згідно з другим варіантом, спосіб вимірювання відстані включає в себе наступні кроки: (а) на рівній прямолінійній ділянці дороги вимірюють і заносять в базу даних обчислювального пристрою відстань R від детектора зображень розташованого в салоні автомобіля до полотна дороги по прямій лінії, що з'єднує центр об'єктива детектора, верхню точку контрольного об'єкта на капоті автомобіля і полотно дороги; (б) фіксують зображення ділянки полотна дороги разом з характерними елементами полотна і/або з нанесеними на полотно дороги елементами дорожньої розмітки, розміри яких і/або відстані між якими по горизонталі залишаються незмінними на значних по довжині ділянках дороги, разом із зображенням щонайменше одного контрольного об'єкта ширина а, і відстань s до якого від детектора зображень відомі і занесені в базу даних обчислювального пристрою; 2 UA 115018 C2 5 10 15 20 25 30 35 40 45 50 55 (в) вимірюють на зафіксованому зображенні ширину L0 характерного елементу полотна дорожнього покриття і/або ширину L0 елемента дорожньої розмітки та/або відстань L0 між елементами дорожньої розмітки по умовній горизонтальній лінії, що проходить по верхньому краю зображення контрольного об'єкта і ширину а0 контрольного об'єкта; (г) при появі в полі зору детектора зображень об'єкта, відстань S до якого вимірюється, фіксують його зображення, разом із зображенням характерних елементів полотна дороги і/або нанесених на полотно дороги елементів дорожньої розмітки; (д) вимірюють на зафіксованому зображенні об'єкта, відстань до якого вимірюється, ширину L1 характерного елементу полотна дорожнього покриття і/або ширину L1 елемента дорожньої розмітки і/або відстань L1 по горизонталі між елементами дорожньої розмітки по умовній горизонтальній лінії, що проходить по нижньому краю об'єкта; (e) проводять обчислення відстані S до об'єкта за формулою S=R(L0/L1). У другому варіанті вимірювання відстані до об'єкта враховується той факт, що реальна ширина полотна дороги або елементів розмітки дорожнього покриття, наприклад, розмітки розмежувальних смуг, не змінюється на значних по довжині ділянках дороги. Спосіб за обома варіантами може бути реалізований автомобільним пасивним оптичним пристроєм для вимірювання відстані до об'єкта, який містить: (а) обчислювальний пристрій з базою даних множини n об'єктів які часто зустрічаються в полі зору спостерігача або об'єктива камери при русі автомобіля з номерами i від 1 до n і множини m характерних деталей цих об'єктів з номерами у від 1 до m, які мають відомі розміри по довжині хij або по висоті уij; (б) щонайменше один детектор зображень, розташований переважно у верхній передній частині салону за переднім склом автомобіля; (в) щонайменше один контрольний об'єкт який або є елементом кузова автомобіля або розташований на кузові автомобіля довжина а, висота b і відстань s до якого від детектора зображень відомі. Використання двох і більшого числа детекторів зображень дозволить проводити вимірювання відстаней кожним з цих детекторів як для різних об'єктів, так і для одного і того ж об'єкта. В останньому випадку підвищується точність визначення відстані. Використання декількох контрольних об'єктів, також може підвищити точність вимірювання відстані до об'єкта або дозволить проводити одночасні вимірювання відстаней до різних об'єктів в разі використання декількох детекторів зображень. Далі суть винаходу пояснюється детальним описом з посиланнями на креслення, де зображені на: фіг. 1 - ділянка дороги, на якій показані: об'єкт 1 під номером і (1іn) з бази даних множини п об'єктів які часто зустрічаються в полі зору спостерігача або об'єктива камери при русі автомобіля, відстань Si до якого вимірюється, характерна деталь 2 цього об'єкта під номером j (1jm) з множини m характерних деталей об'єктів, яка мають відомі реальні розміри по висоті уij передня частина автомобіля з встановленим детектором зображень 3, розташованим у верхній передній частині кузова за переднім склом автомобіля; контрольний об'єкт 4, з реальною шириною а, висотою b, що знаходиться на відстані s від детектора зображень 3; фіг. 2 - схематичне зображення 5, на якому показані: об'єкт 1 під номером i (1іn) з бази даних множини n об'єктів, відстань Si до якого вимірюється, характерна деталь 3 цього об'єкта під номером j (1jm) з множини m характерних деталей об'єктів з шириною x 0 або висотою у0 на зображенні 5, контрольний об'єкт 4 з шириною а0 і висотою b0 на зображенні 5; фіг. 3 - вигляд зверху ділянки дороги з елементами 6 дорожньої розмітки, на якому показані: передня частина автомобіля з встановленим детектором зображень 3, контрольний об'єкт 4 якій є елементом капоту автомобіля довжина а, і відстань s до якого від детектора зображень 3 відомі; фіг. 4 - схематичне зображення 7, на якому показані: ділянка дороги з елементами 6 дорожньої розмітки, контрольний об'єкт 4 якій є елементом капоту автомобіля, об'єкт 2, відстань до якого вимірюється. Наступний опис представляє найкращі варіанти втілення винаходу. Цей опис зроблено з метою ілюстрації основних принципів винаходу і його не слід розуміти як вичерпний для всіх варіантів втілення винаходу. Обсяг прав винаходу найповніше визначається посиланням на прикладену формулу винаходу. Згідно з першим варіантом, спосіб вимірювання відстані включає в себе наступні кроки (див. фігури 1 і 2): 3 UA 115018 C2 5 10 15 20 25 30 35 40 45 50 55 (а) створюють в обчислювальному пристрої базу даних множини n об'єктів 1 які часто зустрічаються в полі зору спостерігача або об'єктива камери при русі автомобіля з номерами i від 1 до n і множини m характерних деталей 2 цих об'єктів з номерами j від 1 до m, які мають відомі розміри по ширині хij або по висоті уij; (б) вимірюють реальну ширину а, реальну висоту b і відстань s від детектора зображень 3 розташованого в салоні автомобіля до щонайменше одного контрольного об'єкта 4, розташованого на кузові автомобіля або який є частиною кузова автомобіля, і заносять ці дані в базу даних обчислювального пристрою; (в) фіксують зображення 5 об'єкта 1 під номером (1іn), відстань Si до якого вимірюється (див. фігури 1 і 2), разом із зображенням щонайменше одного контрольного об'єкта 4 ширина а, висота b і відстань s до якого від детектора зображень 3 відомі і занесені в базу даних обчислювального пристрою; (г) проводять порівняльний аналіз зображення об'єкта 1 із зображеннями об'єктів 1 з бази даних обчислювального пристрою і виділяють на об'єкті 1 щонайменше одну характерну деталь 2, розмір по ширині хij або по висоті уij якої є в базі даних; (д) вимірюють на зображенні 5 ширину х 0 або висоту у0 щонайменше однієї характерної деталі 2 об'єкта 1 з бази даних, яка має відомі розміри по довжині х ij або по висоті уij, і ширину а0 або висоту bо контрольного об'єкта 4; (e) проводять обчислення відстані Si до об'єкта 1 за формулою Si=s▪(a0/x0)- (хij/a) або Si=s▪(b0/y0)-(yij/b). Обчислювальним пристроєм (який не показаний на фігурах 1-4), в пам'ять якого заносять базу даних множини n об'єктів 1 і множини m характерних деталей 2 цих об'єктів, які мають відомі розміри по ширині або по висоті, може бути бортовий комп'ютер автомобіля або переносний обчислювальний пристрій (ноутбук, нетбук, мобільний телефон), який може приймати інформацію з щонайменше одного детектора зображень 3. Детектором зображень 3 можуть бути відеокамери, відеореєстратори, камери як бортового, так і переносних обчислювальних пристроїв. Кількість детекторів зображень 3 може бути більше одного з тим, щоб або забезпечити фіксацію зображень в різних напрямках і кутах спостережень за об'єктами 1, наприклад, в передній і задній півсферах, або забезпечити фіксацію зображення одного і того ж об'єкта 1 декількома детекторами зображень 3, з метою підвищення точності визначення відстані до об'єкта 1. Останнє забезпечується за рахунок використання відомого методу - усереднення результатів багаторазових незалежних вимірювань. Контрольними об'єктами 4, які бажано заздалегідь вибрати на поверхні кузова автомобіля, можуть бути будь-які конструктивні або декоративні деталі кузова, розміри яких можна виміряти, наприклад, довжина кромки передньої частини капота автомобіля (див. Фіг. 3). Кількість контрольних об'єктів 4 може бути більше одного з тим, щоб або використовувати їх при роботі декількох детекторів зображень 3, при цьому кожен детектор зображень 3 може використовуватися разом з одним певним контрольним об'єктом 4, або при роботі одного детектора 3 з декількома контрольними об'єктами 4, що дозволяє отримати кілька незалежних результатів вимірювань і, відповідно, підвищити точність вимірювання відстані до об'єкта 1. Порівняльний аналіз зафіксованого зображення (наприклад, зображення 5, див. фіг. 2, або зображення 7, див. фіг. 4) об'єкта 1 з зображеннями об'єктів 1 з бази даних обчислювального пристрою, а також вимірювання розмірів характерних деталей 2 і розмірів контрольних об'єктів 4 на зафіксованих зображеннях (див. фіг. 2 і фіг. 3), можна проводити за допомогою відомих методів аналізу, обробки і порівняння зображень, наприклад, по характерних змінах кольору і контрастності зображень. Вимірювання всіх реальних розмірів контрольних об'єктів 4, обраних на поверхні кузова автомобіля, а також відстаней від них до детекторів зображень 3, бажано провести заздалегідь за допомогою будь-якого відомого методу або пристрою, наприклад, за допомогою вимірювальної рулетки, і потім занести отримані результати в обчислювальний пристрій. Обчислення результатів вимірювань за отриманими даними проводиться на процесорі обчислювального пристрою. Згідно з другим варіантом, спосіб вимірювання відстані включає в себе наступні кроки (див. фігури 3 і 4): (а) на рівній прямолінійній ділянці дороги вимірюють і заносять в базу даних обчислювального пристрою відстань Я(див. фіг. 3) від детектора зображень 3 розташованого в 4 UA 115018 C2 5 10 15 20 25 30 35 40 45 50 55 60 салоні автомобіля до полотна дороги по прямій лінії, що з'єднує центр об'єктива детектора 3, верхню точку контрольного об'єкта 4 на капоті автомобіля і полотно дороги; (б) фіксують зображення ділянки полотна дороги разом з характерними елементами полотна і/або з нанесеними на полотно дороги елементами дорожньої розмітки 6 (див. фіг. 4), розміри яких і/або відстані між якими по горизонталі (наприклад, відстань L на фіг. 3) залишаються незмінними на значних по довжині ділянках дороги, разом із зображенням щонайменше одного контрольного об'єкта 4 ширина а, і відстань s до якого від детектора зображень 3 відомі і занесені в базу даних обчислювального пристрою; (в) вимірюють на зафіксованому зображенні 7 ширину L0 характерного елементу полотна дорожнього покриття і/або ширину L0 елемента дорожньої розмітки 6 і/або відстань L0 між елементами дорожньої розмітки 6 (як показано на фіг. 4) по умовній горизонтальній лінії, що проходить по верхньому краю зображення контрольного об'єкта 4 і ширину ао контрольного об'єкта 4; (г) при появі в полі зору детектора зображень 3 об'єкта 1, відстань S до якого вимірюється, фіксують його зображення 7, разом із зображенням характерних елементів полотна дороги і/або нанесених на полотно дороги елементів дорожньої розмітки 6 і 8 (як показано на фіг. 4); (д) вимірюють на зафіксованому зображенні 7 об'єкта 1, відстань до якого вимірюється, ширину L1 характерного елементу полотна дорожнього покриття і/або ширину L1 елемента дорожньої розмітки і/або відстань L1 по горизонталі між елементами дорожньої розмітки 8 по умовній горизонтальній лінії, що проходить по нижньому краю об'єкта (цей варіант показаний на фіг. 4); (e) проводять обчислення відстані S до об'єкта 1 за формулою S=R(L0/L1). Вимірювання відстані R від детектора зображень 3 до полотна дороги по прямій лінії, що з'єднує центр об'єктива детектора 3, верхню точку контрольного об'єкта 4 на капоті автомобіля і полотно дороги, а також всіх реальних розмірів контрольних об'єктів 4, обраних на поверхні кузова автомобіля, а також відстаней від них до детекторів зображень 3, бажано провести заздалегідь за допомогою будь-якого відомого методу або пристрою, наприклад, за допомогою вимірювальної рулетки, і потім занести отримані результати в обчислювальний пристрій. Вимірювання на зафіксованому зображенні 7 ширини L0 характерного елемента полотна дорожнього покриття і/або ширини L0 елемента дорожньої розмітки 6 і/або відстані L0 між елементами дорожньої розмітки 6 (як показано на фіг. 4) по умовній горизонтальній лінії, що проходить по верхньому краю зображення контрольного об'єкта і ширину а 0 контрольного об'єкта, а також ширини L1 характерного елементу полотна дорожнього покриття і/або ширини L1 елемента дорожньої розмітки і/або відстані L1 по горизонталі між елементами дорожньої розмітки 8 по умовній горизонтальній лінії, що проходить по нижньому краю об'єкта (цей варіант показаний на фіг. 4) проводять відомими методами вимірювань розмірів на зображеннях, наприклад, по характерних змінах кольору і/або контрастності на зображенні. Всі вимірювання розмірів на зображеннях і по ним обчислення результатів вимірювань відстаней до об'єктів проводяться в процесорі обчислювального пристрою. Спосіб за обома варіантами може бути реалізований автомобільним пасивним оптичним пристроєм для вимірювання відстані до об'єкта, який містить (див. фігури 1 і 3): (а) обчислювальний пристрій (не показаний на фігурах) з базою даних множини n об'єктів 1 які часто зустрічаються в полі зору спостерігача або об'єктива камери при русі автомобіля з номерами i від 1 до n і множини m характерних деталей 2 цих об'єктів з номерами у від 1 до m, які мають відомі розміри по довжині хij або по висоті уij (б) щонайменше один детектор зображень 3, розташований переважно у верхній передній частині салону за переднім склом автомобіля; (в) щонайменше однієї контрольний об'єкт 4 або який є елементом кузова автомобіля або розташований на кузові автомобіля довжина а, висота b і відстань s до якого від детектора зображень 3 відомі. Всі зазначені в описі кроки по реалізації способів вимірювання відстані або можуть проводитися заздалегідь, або досить прості з тим, щоб їх можна було використовувати в режимі реального часу. Точність вимірювання відстаней за першим варіантом способу залежить від точності визначення відомих розмірів характерних деталей об'єктів і точності вимірювання розмірів контрольних об'єктів, а за другим варіантом способу від точності вимірювання розмірів на зображеннях і точності вимірювання розмірів контрольних об'єктів. Таким чином, можна забезпечити досить високу точність визначення відстані, особливо в порівнянні з відомими пасивними оптичними методами вимірювання відстаней. 5 UA 115018 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Спосіб вимірювання відстані до об'єкта для використання в автомобільному пасивному оптичному пристрої, який включає: (а) створення в обчислювальному пристрої бази даних множини n об'єктів, які часто зустрічаються в полі зору спостерігача або об'єктива камери, при русі автомобіля з номерами і від 1 до n, та множини m характерних деталей цих об'єктів з номерами j від 1 до m, які мають відомі розміри по ширині хij або по висоті уij; (б) вимірювання реальної ширини а, реальної висоти b і відстані s від детектора зображень, розташованого в салоні автомобіля, до щонайменше одного контрольного об'єкта, розташованого на кузові автомобіля або який є частиною кузова автомобіля, і занесення цих даних в базу даних обчислювального пристрою; (в) фіксацію зображення об'єкта, відстань Si до якого вимірюють разом із зображенням щонайменше одного контрольного об'єкта шириною а, висотою b, і відстань s до якого від детектора зображень відома, і занесення в базу даних обчислювального пристрою; (г) порівняння зображення об'єкта із зображеннями об'єктів з бази даних обчислювального пристрою і виділення на об'єкті щонайменше однієї характерної деталі, розмір по ширині хij або по висоті уij якої є в базі даних; (д) вимірювання на зображенні ширини x 0 або висоти у0 щонайменше однієї характерної деталі об'єкта з бази даних, яка має відомі розміри по довжині х ij або по висоті уij і ширину а0 або висоту b0 контрольного об'єкта; (e) обчислення відстані Si до об'єкта за формулою: Si=s▪(a0/x0)-(хij/a) або Si=s▪(b0/y0)-(yij/b). 2. Спосіб вимірювання відстані до об'єкта, який включає: (а) на рівній прямолінійній ділянці дороги вимірювання і занесення до бази даних обчислювального пристрою відстані R від детектора зображень, розташованого в салоні автомобіля, до полотна дороги по прямій лінії, що з'єднує центр об'єктива детектора, верхню точку контрольного об'єкта на капоті автомобіля і полотно дороги; (б) фіксування зображення ділянки полотна дороги разом з характерними елементами полотна і/або з нанесеними на полотно дороги елементами дорожньої розмітки, розміри яких і/або відстані між якими по горизонталі залишаються незмінними на значних по довжині ділянках дороги, разом із зображенням щонайменше одного контрольного об'єкта ширина а, і відстань s до якого від детектора зображень відома і занесена в базу даних обчислювального пристрою; (в) вимірювання на зафіксованому зображенні ширини L0 характерного елемента полотна дорожнього покриття і/або ширини L0 елемента дорожньої розмітки та/або відстані L0 між елементами дорожньої розмітки по умовній горизонтальній лінії, що проходить по верхньому краю зображення контрольного об'єкта, і ширини а0 контрольного об'єкта; (г) при появі в полі зору детектора зображень об'єкта, відстань S до якого вимірюється, фіксування його зображення, разом із зображенням характерних елементів полотна дороги і/або нанесених на полотно дороги елементів дорожньої розмітки; (д) вимірювання на зафіксованому зображенні об'єкта, відстань до якого вимірюється, ширини L1 характерного елемента полотна дорожнього покриття і/або ширини L1 елемента дорожньої розмітки, і/або відстані U по горизонталі між елементами дорожньої розмітки по умовній горизонтальній лінії, що проходить по нижньому краю об'єкта; (e) обчислювання відстані S до об'єкта за формулою: S=R(L0/L1). 3. Автомобільний пасивний оптичний пристрій для вимірювання відстані до об'єкта для здійснення способу за одним із пунктів 1, 2, який містить: (а) обчислювальний пристрій з базою даних множини n об'єктів, які часто зустрічаються в полі зору спостерігача або об'єктива камери, при русі автомобіля з номерами і від 1 до n, та множини m характерних деталей цих об'єктів з номерами j від 1 до m, які мають відомі розміри по довжині хij або по висоті уij; (б) щонайменше один детектор зображень, розташований переважно у верхній передній частині салону за переднім склом автомобіля; 6 UA 115018 C2 (в) щонайменше один контрольний об'єкт, який або є елементом кузова автомобіля, або розташований на кузові автомобіля довжиною а, висотою b і відстань s до якого від детектора зображень відомі. Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 3/08, G06T 7/73, G01C 11/36
Мітки: пасивний, відстані, вимірювання, оптичний, автомобільний, пристрій, спосіб, реалізації, варіанти, об'єкта
Код посилання
<a href="https://ua.patents.su/9-115018-sposib-vimiryuvannya-vidstani-do-obehkta-varianti-ta-avtomobilnijj-pasivnijj-optichnijj-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання відстані до об’єкта (варіанти) та автомобільний пасивний оптичний пристрій для його реалізації</a>
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецький Віталій Анатолійович, Гнітецька Тетяна Віталіївна
МПК: G01F 23/28, G01F 23/296
Мітки: відстані, ультразвукового, реалізації, пристрій, вимірювання, спосіб, локаційного
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Спосіб електронного вимірювання електроенергії і пристрій для його реалізації (варіанти)
Номер патенту: 32555
Опубліковано: 15.02.2001
Автори: Хеммінгер Родні К., Мандей Марк Л.
МПК: G01R 21/133, G01R 13/00, H02J 13/00
Мітки: спосіб, реалізації, варіанти, пристрій, електроенергії, електронного, вимірювання
Текст:
...и тока и для создания информации об электроэнергии. Кроме того, между схемой умножения 82 и накопителем 84 включена схема арифметического вычитания 86. Константы для калибровки каждой фазы и константы для линеаризации определенных потенциалов хранят в памяти 80. Запоминающие устройства 76 и 80 последовательно загружают из ЭСППЗУ 35 микроконтроллером 16 по включению питания измерителя 10. Процессор 14 содержит также кварцевый генератор...
Спосіб вимірювання відстані до об’єкта та оптико-електронний пристрій для його здійснення
Номер патенту: 93120
Опубліковано: 10.01.2011
Автори: Титаренко Іван Титович, Пасько Ігор Матвійович, Гринюк Ігор Євгенович
МПК: G01C 3/00
Мітки: об'єкта, відстані, вимірювання, оптико-електронний, пристрій, спосіб, здійснення
Формула / Реферат:
1. Спосіб вимірювання відстані до об'єкта, в якому формують модульовані з високою частотою основний і гетеродинний сигнали, формують опорний сигнал, спрямовують основний сигнал в світловому вигляді до об'єкта, спрямовують відбитий від об'єкта основний сигнал на фотоприймальний пристрій, змішують гетеродинний сигнал з опорним сигналом і, після відбиття від об'єкта, - з основним сигналом, виділяють з цих сигналів низькочастотні складові...
Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення
Номер патенту: 21472
Опубліковано: 16.12.1997
Автори: Дубровний Віктор Опанасович, Головко Дмитро Богданович, Ментковський Юзеф Леонович, Кондратов Владислав Тимофійович, Скрипник Юрій Олексійович
МПК: G01C 3/08
Мітки: здійснення, відстані, вимірювання, предмета, спосіб, фазовий, пристрій, нерухомого
Формула / Реферат:
1. Фазовий спосіб вимірювання відстані до нерухомого предмета, який полягає у створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні різниці фаз електричних сигналів і визначенні відстані за аналітичним співвідношенням,...
Спосіб вимірювання енергії імпульсів оптичного випромінювання та пристрій для його реалізації
Номер патенту: 99026
Опубліковано: 10.07.2012
Автори: Леваш Леонід Васильович, Лисенко Віталій Степанович, Самойлов Володимир Борисович, Птушинський Юрій Григорович
МПК: G01J 5/10
Мітки: випромінювання, пристрій, вимірювання, оптичного, спосіб, імпульсів, реалізації, енергії
Формула / Реферат:
1. Спосіб вимірювання енергії імпульсу оптичного випромінювання, який полягає в опроміненні імпульсом піроелектричного детектора, фільтрації та підсиленні електричного сигналу, який потім подається на аналого-цифровий перетворювач (АЦП), подальшої передачі цифрового образу сигналу в комп'ютер з послідуючою математичною обробкою, що складається з визначення нульового рівня по частині цифрового образу сигналу, що передує початку імпульсу,...
Попередній патент: Спосіб газифікації твердого палива та газифікатор комбінований твердопаливний для його здійснення
Наступний патент: Стійкий до гербіцидів aнas-мутант рослини brassica
Випадковий патент: Спосіб виробництва йогуртного продукту