Спосіб визначення координат літаючого об’єкта на основі використання радіосигналів базових станцій мереж стільникового зв’язку
Номер патенту: 117633
Опубліковано: 26.06.2017
Автори: Бурдейний Микита Віталійович, Шабатура Юрій Васильович



Формула / Реферат
Спосіб визначення координат літаючого об'єкта на основі використання радіосигналів базових станцій мереж стільникового зв'язку, що включає літаючий об'єкт, на який встановлюють бортовий комплекс, що приймає радіосигнали щонайменше від трьох базових станцій мереж стільникового зв'язку, за даними радіосигналами бортовий комплекс визначає номер базової станції та номер пелюстка спрямованості базової станції, який відрізняється тим, що в пам'ять бортового комплексу попередньо заносять інформацію про точні координати розташування базових станцій мереж стільникового зв'язку за їх номерами, а до складу бортового комплексу додатково включають електронний годинник, який попередньо синхронізують з електронними годинниками базових станцій мереж стільникового зв'язку, причому бортовий комплекс за прийнятими радіосигналами базових станцій мереж стільникового зв'язку визначають моменти часу їх випромінювання даними станціями і здійснюють визначення дальності до кожної базової станції мереж стільникового зв'язку на підставі визначення часу затримки радіосигналів до моменту їх прийому з наступним помноженням даного часу затримки на швидкість розповсюдження радіосигналів, причому визначення координат літаючого об'єкта виконують за наступними формулами:
![]() ;
;
![]() ;
;
![]() ;
;
де: ![]() ,
, ![]() ,
, ![]() - координати літаючого об'єкта;
- координати літаючого об'єкта;
![]() ,
, ![]() ,
, ![]() - відомі координати розташування першої з трьох базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс;
- відомі координати розташування першої з трьох базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() - коефіцієнти, які розраховують за наступними співвідношеннями:
- коефіцієнти, які розраховують за наступними співвідношеннями:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
де: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() - відомі координати розташування двох інших базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс відповідно;
- відомі координати розташування двох інших базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс відповідно;
![]() - модуль вектора спрямованого від першої до другої базової станції, який розраховують за формулою:
- модуль вектора спрямованого від першої до другої базової станції, який розраховують за формулою:
![]() ;
;
![]() - модуль векторного добутку векторів спрямованих від першої до другої і від першої до третьої базових станцій відповідно, який розраховують за формулою:
- модуль векторного добутку векторів спрямованих від першої до другої і від першої до третьої базових станцій відповідно, який розраховують за формулою:
 ;
;
![]() ,
, ![]() ,
, ![]() - координати літаючого об'єкта в спеціальній системі координат, які розраховуються за формулами:
- координати літаючого об'єкта в спеціальній системі координат, які розраховуються за формулами:
![]() ;
;
![]() ;
;
![]() ;
;
де: ![]() ,
, ![]() ,
, ![]() - дальності від літаючого об'єкта до відповідної базової станції мереж стільникового зв'язку;
- дальності від літаючого об'єкта до відповідної базової станції мереж стільникового зв'язку;
![]() ,
, ![]() ,
, ![]() - координати відповідних базових станцій мереж стільникового зв'язку в спеціальній системі координат, які розраховуються за формулами:
- координати відповідних базових станцій мереж стільникового зв'язку в спеціальній системі координат, які розраховуються за формулами:
![]() ;
;
![]() ;
;
![]()
де: ![]() - півпериметр уявного трикутника зі сторонами
- півпериметр уявного трикутника зі сторонами ![]() ,
, ![]() ,
, ![]() , що створюють базові станції мереж стільникового зв'язку, який розраховується за формулою:
, що створюють базові станції мереж стільникового зв'язку, який розраховується за формулою:
![]() ;
;
сторони трикутника ![]() ,
, ![]() ,
, ![]() визначаються за співвідношеннями:
визначаються за співвідношеннями:
![]() ;
;
![]() ;
;
![]() .
.
Текст
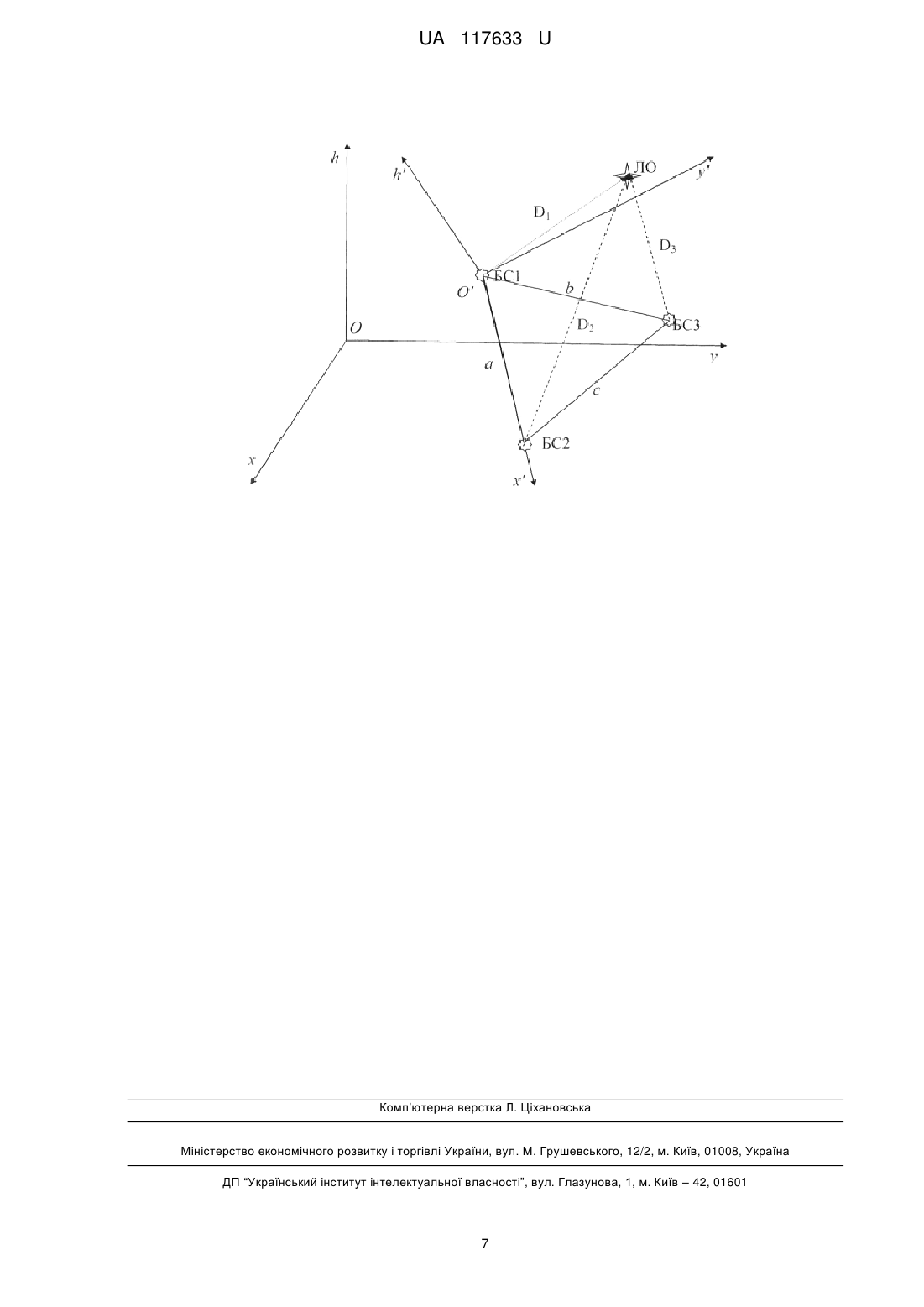
Реферат: Спосіб визначення координат літаючого об'єкта на основі використання радіосигналів базових станцій мереж стільникового зв'язку включає літаючий об'єкт, на який встановлюють бортовий комплекс, що приймає радіосигнали щонайменше від трьох базових станцій мереж стільникового зв'язку, за даними радіосигналами бортовий комплекс визначає номер базової станції та номер пелюстка спрямованості базової станції. В пам'ять бортового комплексу попередньо заносять інформацію про точні координати розташування базових станцій мереж стільникового зв'язку за їх номерами, а до складу бортового комплексу додатково включають електронний годинник, який попередньо синхронізують з електронними годинниками базових станцій мереж стільникового зв'язку. Бортовий комплекс за прийнятими радіосигналами базових станцій мереж стільникового зв'язку визначають моменти часу їх випромінювання даними станціями і здійснюють визначення дальності до кожної базової станції мереж стільникового зв'язку на підставі визначення часу затримки радіосигналів до моменту їх прийому з наступним помноженням даного часу затримки на швидкість розповсюдження радіосигналів. Визначення координат літаючого об'єкта виконують за формулами. UA 117633 U (54) СПОСІБ ВИЗНАЧЕННЯ КООРДИНАТ ЛІТАЮЧОГО ОБ'ЄКТА НА ОСНОВІ ВИКОРИСТАННЯ РАДІОСИГНАЛІВ БАЗОВИХ СТАНЦІЙ МЕРЕЖ СТІЛЬНИКОВОГО ЗВ'ЯЗКУ UA 117633 U UA 117633 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області навігації, зокрема до способу навігації з використанням радіосигналів базових станцій мереж стільникового зв'язку, і може використовуватися як у військовій сфері для навігаційного забезпечення високошвидкісних ракет тактичного і оперативно-тактичного призначення, так і для цивільних потреб, зокрема для навігації літаків та управління безпілотними літаючими апаратами. Відомий спосіб визначення місцеположення абонентської мобільної станції, встановленої на транспортному засобі [патент РФ №2272356, опубл. 20.03.2006], який полягає в тому, що абонентська мобільна станція приймає N сигналів локації, відповідної кожної з N базових станцій мереж стільникового зв'язку, за прийнятими радіосигналами оцінюють затримки радіосигналів від кожної N базових станцій мереж стільникового зв'язку до абонентської мобільної станції, для кожної з N базових станцій мереж стільникового зв'язку визначають величину похибки за оціненою затримкою радіосигналу, як різницю між сумою оціненої затримки пілот-радіосигналу з припущеним розузгодженням годин, помножених на швидкість світла, та відстані до прогнозованого місцезнаходження абонентської мобільної станції, для кожної станції визначають ваговий коефіцієнт міри похибки, формують оцінку відстані до N базових станцій мереж стільникового зв'язку, приймають за початкові оцінки координат абонентської мобільної станції, яка встановлена на транспортному засобі, формують траєкторію руху транспортного засобу у вигляді функціональної залежності. Недоліком даного способу є те, що він не може застосовуватися для визначення координат літаючих об'єктів. Відомий спосіб визначення географічних координат [патент України №112690, опубл. 26.12.2016], який передбачає вимірювання різниці фаз, оброблених навігаційним приймачем радіосигналів прийнятих чотирма антенними елементами розташованими на жорсткій конструкції, положення якої відоме відносно власної системи координат носія, формалізується залежність різниць фаз на антенних елементах від орієнтації ліній між антенними елементами, та відношення для визначення вектора шуканих параметрів ітераційним методом, змінюють вектор невідомих параметрів та по відповідно модифікованому алгоритму, з використанням показників, додатково встановлених на гіроплатформі трьох гіроскопів, обчислюють географічні координати об'єкта. Недоліком даного способу є складність процесу вимірювання різниці фаз радіосигналу, а також необхідність застосування чотирьох антенних елементів, які розташовані на жорсткій конструкції, що збільшує габарити навігаційного комплексу, знижує його надійність і робить малопридатним для використання на літаючих об'єктах. Найбільш близьким за технічною суттю є спосіб визначення географічних координат транспортних засобів відносно базових станцій [патент України №39325, опубл. 25.02.2009], який полягає у тому, що на транспортному засобі встановлюють щонайменше один бортовий комплекс, який приймає щонайменше один радіосигнал, який генерується щонайменше однією базовою станцією мереж стільникового зв'язку, причому отримавши згаданий сигнал, бортовий комплекс визначає параметри базової станції мереж стільникового зв'язку, а саме: номер базової станції мереж стільникового зв'язку та номер пелюстка спрямованості базової станції мереж стільникового зв'язку за допомогою функції NETMONITOR і заносить в запам'ятовувальний пристрій бортового комплексу, для визначення географічних координат транспортного засобу з центра керування формується запит номерів базових станцій та номерів пелюстків спрямованості, який відсилається через оператора мобільного зв'язку в бортовий комплекс, який формує інформацію про номери базових станцій мереж стільникового зв'язку та номери пелюстків спрямованості базових станцій мереж стільникового зв'язку і відсилає її оператору мобільного зв'язку, який визначає методом інтегрального обчислення зони покриття сигналів базових станцій мереж стільникового зв'язку географічні координати транспортного засобу. Недоліком даного способу є невелика точність визначення географічних координат транспортного засобу що становить: у межах міста ±20 метрів і за межами міста ±500 метрів, а також відсутня можливість отримання географічних координат в умовах реального часу, що виключає застосування даного способу для забезпечення навігації літаючих об'єктів. В основу корисної моделі поставлена задача створення способу визначення координат літаючого об'єкта на основі використання радіосигналів базових станцій мереж стільникового зв'язку, в якому за рахунок прийому бортовим комплексом радіосигналів щонайменше від трьох базових станцій мереж стільникового зв'язку, і обчислення за часом запізнення отриманих радіосигналів відстаней до цих базових станцій мереж стільникового зв'язку, після чого на підставі розроблених математичних формул здійснюється розрахунок координат літаючого об'єкта. 1 UA 117633 U 5 10 15 Поставлена задача вирішується тим, що в способі визначення координат літаючого об'єкта на основі використання радіосигналів базових станцій мереж стільникового зв'язку на літаючому об'єкті встановлюють бортовий комплекс, який приймає радіосигнали щонайменше від трьох базових станцій мереж стільникового зв'язку, за даними радіосигналами бортовий комплекс, визначає номер базової станції, та номер пелюстка спрямованості базової станції, при цьому попередньо в пам'ять бортового комплексу заносять інформацію про точні координати знаходження базових станцій мереж стільникового зв'язку за їх номерами, а до складу бортового комплексу додатково включають електронний годинник, який попередньо синхронізується з електронними годинниками базових станцій мереж стільникового зв'язку, причому бортовий комплекс за прийнятими радіосигналами базових станцій мереж стільникового зв'язку визначає моменти часу їх випромінювання даними станціями і здійснює визначення дальності до кожної базової станції мереж стільникового зв'язку на підставі визначення часу затримки радіосигналів до моменту їх прийому з наступним помноженням даного часу затримки на швидкість розповсюдження радіосигналів, причому визначення координат літаючого об'єкта виконується за наступними формулами: ' ' ' x П х1 х Пc 21 y Пc 21 hПc 31 ; ' ' ' у П у1 х Пc 12 y Пc 22 hПc 32 ; ' ' ' hП h1 х Пc 13 y Пc 23 hПc 33 ; 20 25 де: x П , у П , hП - координати літаючого об'єкта; х 1 , у 1 , h1 - відомі координати розташування першої з трьох базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс; C11 , C12 , C13 , C21 , C 22 , C 23 , C31 , C 32 , C 33 - коефіцієнти, які розраховуються за наступними співвідношеннями: c 31 y 2 y1 h3 h1 h2 h1 y 3 y1 ; c 32 h2 h1 x 3 x1 x 2 x1 h3 h1 ; c 33 x 2 x1 y 3 y1 y 2 y1 x 3 x1 ; r12 r13 r12 r13 r12 r13 x 2 x1 ; r12 y 2 y1 ; r12 c 13 35 c 11 c 12 30 h 2 h1 ; r12 c 21 c13c 32 c12c 33 ; c 22 c11c 33 c13 c 31 ; c 23 c12c 31 c11c 32 ; де: x 2 , x 3 , y 2 , y 3 , h 2 , h 3 - відомі координати розташування двох інших базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс відповідно; r12 - модуль вектора спрямованого від першої до другої базової станції, який 40 розраховується за формулою: r12 x 2 x1 2 y 2 y1 2 h2 h12 ; 2 UA 117633 U r12 r13 - модуль векторного добутку векторів спрямованих від першої до другої і від першої до третьої базових станцій відповідно, який розраховується за формулою: r12 r13 y 2 y1 h3 h1 h2 h1 y 3 y1 2 h 2 h1 x 3 x1 x 2 x1 h3 h1 2 ; x 2 x1 y 3 y1 y 2 y1 x 3 x1 2 5 ' ' ' х П , y П , hП - координати літаючого об'єкта в спеціальній системі координат, які розраховуються за формулами: ' хП ' yП 10 2 2 D1 D 2 x '2 2 2x '2 ; 2 ' 2 ' 2 D 2 D 3 x '2 2x '2 x П х '3 2x '3 x П y '3 2 ; 2y '3 ' 2 '2 '2 hП D1 xП yП ; де: D1 , D 2 , D 3 - дальності від літаючого об'єкта до відповідної базової станції мереж стільникового зв'язку; 15 x '2 , x '3 , y '3 - координати відповідних базових станцій мереж стільникового зв'язку в спеціальній системі координат, які розраховуються за формулами: x '2 y '3 x '3 x 2 x12 y 2 y12 h2 h12 2 pp ap bp c ; ; a 2 b y '3 , 20 де: p - півпериметр уявного трикутника зі сторонами a , b , c , що створюють базові станції мереж стільникового зв'язку, який розраховується за формулою: p abc ; 2 25 сторони трикутника a , b , c визначаються за співвідношеннями: a x '2 ; b 30 35 40 x 3 x12 y 3 y12 h3 h12 ; c x 3 x 2 2 y 3 y 2 2 h3 h2 2 . На кресленні наведено схематичне зображення, яке відображає геометричну суть і пояснює механізм здійснення запропонованого способу. На наведеному кресленні прийняті наступні позначення: ЛO - літаючий об'єкт; O, x, y,h - загальноприйнята система координат 1942 року СК-42; O' , x' , y' ,h' - спеціальна система координат; БС1, БС2, БС3 - базові станції мереж стільникового зв'язку, які знаходяться в зоні надходження стійкого радіосигналу в момент здійснення вимірювання, та мають фіксовані координати в СК-42 x1, y1,h1 , x 2 , y 2 ,h2 , x 3 , y 3 ,h3 відповідно. 3 UA 117633 U Базові станції мереж стільникового зв'язку БС1, БС2, БС3 утворюють трикутник, що лежить в площині O' , x' , y' спеціальної системи координат O' , x' , y' , h' , причому БС1 знаходиться в початку спеціальної системи координат та має координати координатна вісь 5 10 O', x' , 0,0,0 , через БС2 проходить тому координати даної станції в спеціальній системі координат матимуть значення x '2 ,0,0 відповідно координати БС3 будуть x '3 , y '3 ,0 . Спосіб визначення координат літаючого об'єкта на основі використання радіосигналів базових станцій мереж стільникового зв'язку здійснюється наступним чином. На літаючому об'єкті встановлюють бортовий комплекс, який приймає радіосигнали щонайменше від трьох випадкових базових станцій мереж стільникового зв'язку БС1, БС2, БС3, і відповідно їх ідентифікує та визначає координати в загальноприйнятій системі координат 1942 року O, x, y,h , які були попередньо занесені в пам'ять, після чого згідно з кресленням, перераховує координати x '2 , x '3 , y '3 цих базових станцій мереж стільникового зв'язку в спеціальну систему координат O' , x' , y' ,h' за наступними формулами: 25 x 2 x12 y 2 y12 h2 h12 ; x 3 x12 y 3 y12 h3 h12 ; c 20 a b 15 x 3 x 2 2 y 3 y 2 2 h3 h2 2 . Завдяки попередній синхронізації електронних годинників базових станцій мереж стільникового зв'язку і бортового комплексу, за прийнятими радіосигналами базових станцій мереж стільникового зв'язку визначаються моменти часу їх випромінювання даними станціями і здійснюється розрахунок дальності D1 , D 2 , D 3 до кожної базової станції мереж стільникового зв'язку БС1, БС2, БС3. На підставі визначення часу затримки радіосигналів до моменту їх прийому з наступним помноженням даного часу затримки на швидкість розповсюдження радіосигналів визначаються координати літаючого об'єкта в додатково введеній спеціальній системі координат O' , x' , y' , h' за наступними формулами: ' хП ' yП 30 2 2 D1 D 2 x '2 2 2x '2 ; 2 ' 2 ' 2 D 2 D 3 x '2 2x '2 x П х '3 2x '3 x П y '3 2 ; 2y '3 ' 2 '2 '2 hП D1 xП yП . Отримавши координати літаючого об'єкта в додатково введеній спеціальній системі координат O' , x' , y' , h' здійснюється перерахунок координат до загальноприйнятої системи координат 1942 року O, x, y,h за наступними формулами: 35 ' ' ' x П х1 х Пc 21 y Пc 21 hПc 31 ; ' ' ' у П у1 х Пc 12 y Пc 22 hПc 32 ; ' ' ' hП h1 х Пc 13 y Пc 23 hПc 33 ; c 31 40 y 2 y1 h3 h1 h2 h1 y 3 y1 ; c 32 h2 h1 x 3 x1 x 2 x1 h3 h1 ; c 33 x 2 x1 y 3 y1 y 2 y1 x 3 x1 ; r12 r13 r12 r13 r12 r13 4 UA 117633 U c 11 c 12 y 2 y1 ; r12 c 13 5 x 2 x1 ; r12 h 2 h1 ; r12 c 21 c13c 32 c12c 33 ; c 22 c11c 33 c13 c 31 ; c 23 c12c 31 c11c 32 ; r12 x 2 x1 2 y 2 y1 2 h2 h1 2 ; r12 r13 y 2 y1 h3 h1 h2 h1 y 3 y1 2 h 2 h1 x 3 x1 x 2 x1 h3 h1 2 . x 2 x1 y 3 y1 y 2 y1 x 3 x1 2 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 Спосіб визначення координат літаючого об'єкта на основі використання радіосигналів базових станцій мереж стільникового зв'язку, що включає літаючий об'єкт, на який встановлюють бортовий комплекс, що приймає радіосигнали щонайменше від трьох базових станцій мереж стільникового зв'язку, за даними радіосигналами бортовий комплекс визначає номер базової станції та номер пелюстка спрямованості базової станції, який відрізняється тим, що в пам'ять бортового комплексу попередньо заносять інформацію про точні координати розташування базових станцій мереж стільникового зв'язку за їх номерами, а до складу бортового комплексу додатково включають електронний годинник, який попередньо синхронізують з електронними годинниками базових станцій мереж стільникового зв'язку, причому бортовий комплекс за прийнятими радіосигналами базових станцій мереж стільникового зв'язку визначають моменти часу їх випромінювання даними станціями і здійснюють визначення дальності до кожної базової станції мереж стільникового зв'язку на підставі визначення часу затримки радіосигналів до моменту їх прийому з наступним помноженням даного часу затримки на швидкість розповсюдження радіосигналів, причому визначення координат літаючого об'єкта виконують за наступними формулами: ' ' ' x П х 1 х Пc 21 y Пc 21 hПc 31 ; ' ' ' у П у1 х П c12 y П c22 hП c32 ; ' ' ' hП h1 х Пc 13 y Пc 23 hП c 33 ; 30 35 де: x П , у П , hП - координати літаючого об'єкта; х 1 , у 1 , h1 - відомі координати розташування першої з трьох базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс; C11 , C12 , C13 , C21 , C 22 , C 23 , C31 , C 32 , C 33 - коефіцієнти, які розраховують за наступними співвідношеннями: y y1 h 3 h1 h 2 h1 y 3 y1 c 31 2 ; r12 r13 c 32 c 33 c 11 h 2 h1 x 3 x1 x 2 x1 h 3 h1 r12 r13 ; r12 r13 ; x 2 x1 y 3 y1 y 2 y1 x 3 x1 x 2 x1 ; r12 5 UA 117633 U c 12 c 13 5 10 y 2 y1 ; r12 h 2 h1 ; r12 c 21 c13 c 32 c12 c 33 ; c 22 c11c 33 c13 c 31 ; c 23 c12 c 31 c11c 32 ; де: x 2 , x 3 , y 2 , y 3 , h 2 , h 3 - відомі координати розташування двох інших базових станцій мереж стільникового зв'язку, радіосигнали з яких прийняв бортовий комплекс, відповідно; r12 - модуль вектора спрямованого від першої до другої базової станції, який розраховують за формулою: r12 x 2 x1 2 y 2 y1 2 h 2 h1 2 ; r12 r13 - модуль векторного добутку векторів спрямованих від першої до другої і від першої до третьої базових станцій відповідно, який розраховують за формулою: r12 r13 15 ' ' ' х П , y П , h П - координати літаючого об'єкта в спеціальній системі координат, які розраховуються за формулами: ' хП ' yП 20 y 2 y1 h3 h1 h 2 h1 y 3 y1 2 h 2 h1 x 3 x1 x 2 x1 h 3 h1 2 ; x 2 x1 y 3 y1 y 2 y1 x 3 x1 2 2 2 D1 D 2 x '2 2 2x '2 ; 2 ' 2 ' 2 D 2 D3 x '2 2x '2 x П х '3 2x '3 x П y '3 2 ; 2y '3 ' 2 '2 '2 hП D1 x П y П ; де: D1 , D 2 , D 3 - дальності від літаючого об'єкта до відповідної базової станції мереж стільникового зв'язку; x '2 , x '3 , y '3 - координати відповідних базових станцій мереж стільникового зв'язку в спеціальній системі координат, які розраховуються за формулами: x '2 y '3 25 x 2 x1 2 y 2 y1 2 h2 h1 2 2 pp ap bp c a ; ; 2 x '3 b y '3 де: p - півпериметр уявного трикутника зі сторонами a , b , c , що створюють базові станції мереж стільникового зв'язку, який розраховується за формулою: abc p ; 2 сторони трикутника a , b , c визначаються за співвідношеннями: 30 a x '2 ; b x 3 x1 2 y 3 y1 2 h3 h1 2 ; c x 3 x 2 2 y 3 y 2 2 h3 h2 2 . 6 UA 117633 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60C 17/06
Мітки: стільникового, мереж, визначення, координат, основі, об'єкта, базових, спосіб, зв'язку, станцій, літаючого, радіосигналів, використання
Код посилання
<a href="https://ua.patents.su/9-117633-sposib-viznachennya-koordinat-litayuchogo-obehkta-na-osnovi-vikoristannya-radiosignaliv-bazovikh-stancijj-merezh-stilnikovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат літаючого об’єкта на основі використання радіосигналів базових станцій мереж стільникового зв’язку</a>
Спосіб визначення географічних координат транспортних засобів відносно базових станцій
Номер патенту: 39325
Опубліковано: 25.02.2009
Автори: Генькин Яків Ізраілович, Строітєлєв Віталій Петрович
МПК: G08B 25/00, B60R 25/00, G08G 1/127
Мітки: відносної, транспортних, засобів, координат, спосіб, станцій, географічних, базових, визначення
Формула / Реферат:
1. Спосіб визначення географічних координат транспортних засобів відносно базових станцій, який відрізняється тим, щоa) на транспортному засобі встановлюють щонайменше один бортовий комплекс, який приймає щонайменше один сигнал, який генерується щонайменше однією базовою станцією мобільного зв'язку,b) отримавши згаданий сигнал, бортовий комплекс визначає параметри базової станції, а саме: номер базової станції та номер пелюстка...
Система високоточного визначення координат на основі супутникових радіонавігаційних систем
Номер патенту: 78185
Опубліковано: 11.03.2013
Автори: Ільницька Світлана Іванівна, Харченко Володимир Петрович, Вишнякова Євгенія Вікторівна, Кондратюк Василь Михайлович, Васильєв Ігор Васильович, Трикоз Валерій Павлович, Кондратюк Марина Василівна, Куценко Олександр Вікторович, Савченко Олексій Володимирович
МПК: G01S 5/14
Мітки: високоточного, система, координат, основі, визначення, радіонавігаційних, супутникових, систем
Формула / Реферат:
Система високоточного визначення координат на основі супутникової радіонавігації, що містить центр обробки та зв'язку, до складу якого входить термінальний блок для централізованого та віддаленого управління роботою блока управління роверної станції та інтегрованого блока управління та зв'язку базових станцій, блок аналізу та обробки для отримання високоточного координатного рішення в пост обробці, блок контролю якості для перевірки...
Спосіб визначення абонентів базових станцій і пристрій для здійснення цього способу
Номер патенту: 44285
Опубліковано: 15.02.2002
Автори: Хамді Валід, Бар-Давід Гіл, Падовані Роберто
Мітки: пристрій, абонентів, здійснення, визначення, цього, станцій, спосіб, способу, базових
Формула / Реферат:
1. Способ идентификации базовых станций, уровень принимаемого сигнала которых достаточен для установления связи с мобильной станцией, в сотовой системе связи, в которой мобильный пользователь через указанную мобильную станцию устанавливает связь с другими пользователями через по меньшей мере одну базовую станцию, включенную в активный список, содержащий в качестве записей одну или более базовых станций, и каждая из базовых станций, входящих,...
Система стільникового зв’язку та її вузли
Номер патенту: 91347
Опубліковано: 26.07.2010
Автор: Громаков Юрій Алєксєєвіч
МПК: H04B 7/26
Мітки: вузлі, система, зв'язку, стільникового
Формула / Реферат:
1. Система стільникового зв'язку, що містить взаємозв'язані між собою підсистему (2) комутації і підсистему (1) базових станцій, яка включає в себе Q базових станцій (3-1,...3-Q), де Q - ціле число, взаємозв'язаних з контролером (4) базових станцій, та мобільні станції (5), зв'язані по радіоканалах робочих частот системи стільникового зв'язку з антенним входом-виходом робочих частот відповідних базових станцій, при цьому кожна базова станція...
Радіонавігаційна система
Номер патенту: 28443
Опубліковано: 10.12.2007
Автори: Куровська Тетяна Юріївна, Якобінчук Олександр Вікторович, Блаженний Валерій Іванович, Слєпов Лев Іванович
МПК: G01S 3/00
Мітки: радіонавігаційна, система
Формула / Реферат:
Радіонавігаційна система, що містить приводну радіостанцію, встановлену на аеродромі, приймач радіонавігаційних сигналів, при цьому приймач радіонавігаційних сигналів встановлено на рухомий об'єкт, яка відрізняється тим, що додатково містить три або більше базових станцій стільникового зв'язку, приймач радіосигналів від базових станцій стільникового зв'язку, при цьому приймач радіосигналів від базових станцій стільникового зв'язку встановлено...