Електродинамічний вібратор
Номер патенту: 12095
Опубліковано: 16.01.2006



Формула / Реферат
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, джерело постійної напруги величиною «Un», установлену в повітряному зазорі магнітопроводу рухому котушку, довжина якої більше довжини повітряного зазору, з обмоткою збудження, задавальний генератор, форсуючий блок, перший, другий, третій і четвертий суматори, підсилювач струму, перший і другий блоки диференціювання, перший, другий, третій, четвертий і п'ятий підсилювачі напруги, коло зворотного зв'язку, що містить послідовно з'єднані датчик переміщення рухомої платформи з випробуваним об'єктом і блок зворотного зв'язку, вихід якого з'єднаний з другим входом другого суматора, вихід якого через підсилювач струму з'єднаний з обмоткою збудження рухомої котушки, а перший вхід другого суматора з'єднаний з виходом першого суматора, послідовно з'єднані перший і другий блоки диференціювання, вхід першого з яких з'єднаний з датчиком переміщення рухомої платформи безпосередньо, а через другий підсилювач напруги з'єднаний з першим входом третього суматора, вихід першого блока диференціювання з'єднаний з входом третього підсилювача напруги, третій вхід третього суматора з'єднаний через четвертий підсилювач напруги з виходом другого блока диференціювання, перший, другий і третій аперіодичні блоки, перший, другий і третій блоки ділення, перший, другий і третій блоки множення, джерело постійної напруги величиною «1», причому вихід задавального генератора через форсуючий блок з'єднаний з входом «Ділене» першого блока ділення, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом третього суматора безпосередньо, а третій вхід першого суматора з'єднаний з виходом третього блока ділення безпосередньо, вхід «Ділене» якого з'єднаний з виходом другого блока множення, а вхід «Подільник» - з виходом третього блока множення, входи якого об'єднані і з'єднані з виходом четвертого суматора, перший вхід якого з'єднаний з виходом джерела постійної напруги величиною «1», а другий вхід з'єднаний з виходом п'ятого підсилювача напруги через третій аперіодичний блок, другий вхід другого блока множення з'єднаний з виходом джерела постійної напруги величиною «Un» через послідовно з'єднані другий аперіодичний блок, перший підсилювач напруги, перший блок множення, входи якого об'єднані, і перший аперіодичний блок, вихід другого аперіодичного блока з'єднаний з входом «Ділене» другого блока ділення, вхід «Подільник» якого з'єднаний з виходом четвертого суматора, який відрізняється тим, що пристрій додатково містить датчик переміщення рухомої котушки з обмоткою збудження, третій і четвертий блоки диференціювання, шостий підсилювач напруги, фазовий детектор, знакочутливий елемент, перший і другий комутатори, причому вихід датчика переміщення рухомої котушки з обмоткою збудження через послідовно з'єднані третій і четвертий блоки диференціювання і шостий підсилювач напруги з'єднаний з другим входом другого комутатора, перший вхід якого з'єднаний з виходом третього підсилювача напруги, а вихід другого комутатора з'єднаний з другим входом третього суматора, перший вхід першого комутатора з'єднаний з виходом першого блока диференціювання, а другий вхід - з виходом третього блока диференціювання, вихід першого комутатора з'єднаний з об'єднаними входом п'ятого підсилювача напруги і першим входом другого блока множення, керувальні входи першого і другого комутаторів об'єднані і з'єднані з виходом знакочутливого елемента, вхід якого з'єднаний з виходом фазового детектора, перший і другий входи якого з'єднані з виходом датчика переміщення рухомої платформи і виходом датчика переміщення рухомої котушки з обмоткою збудження.
Текст
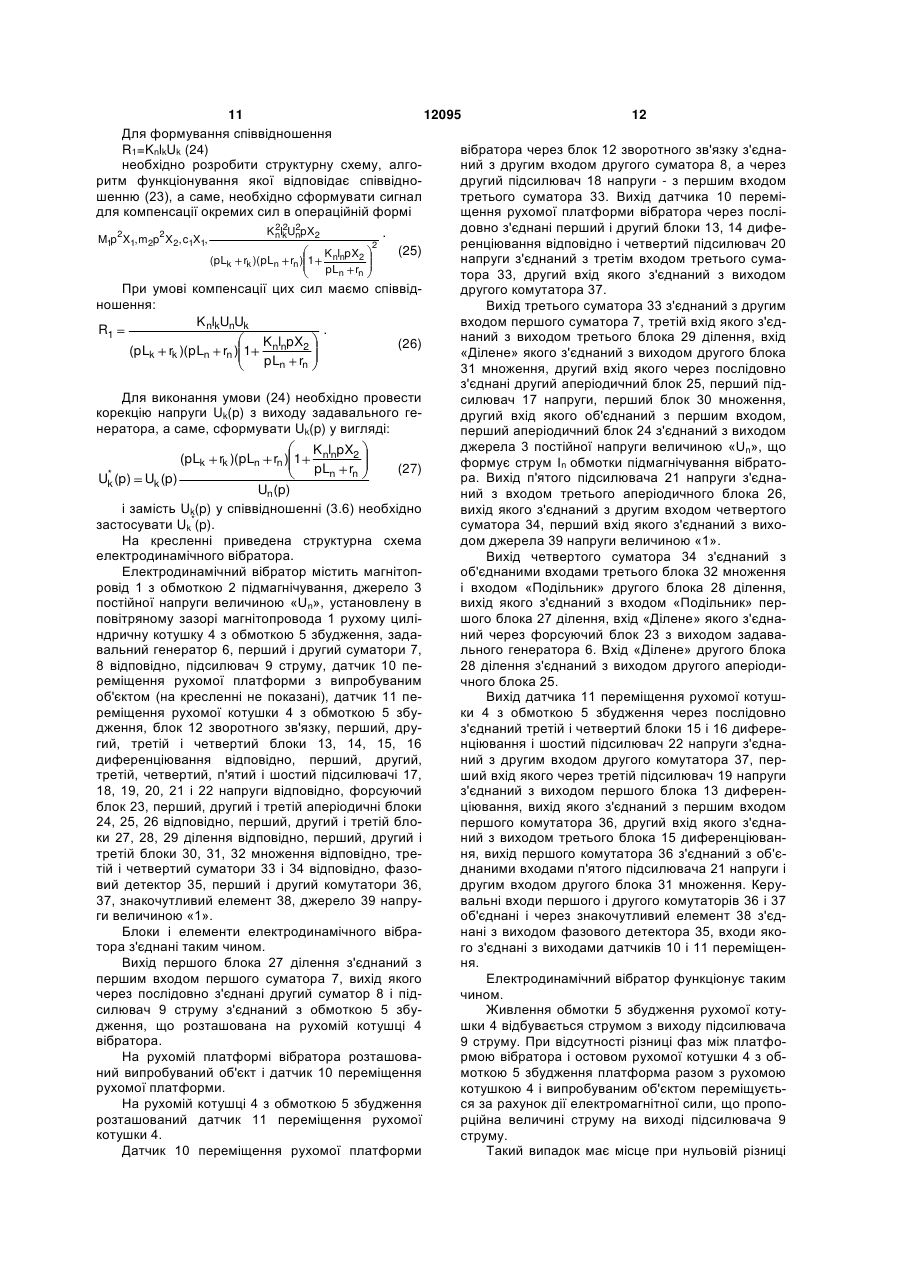
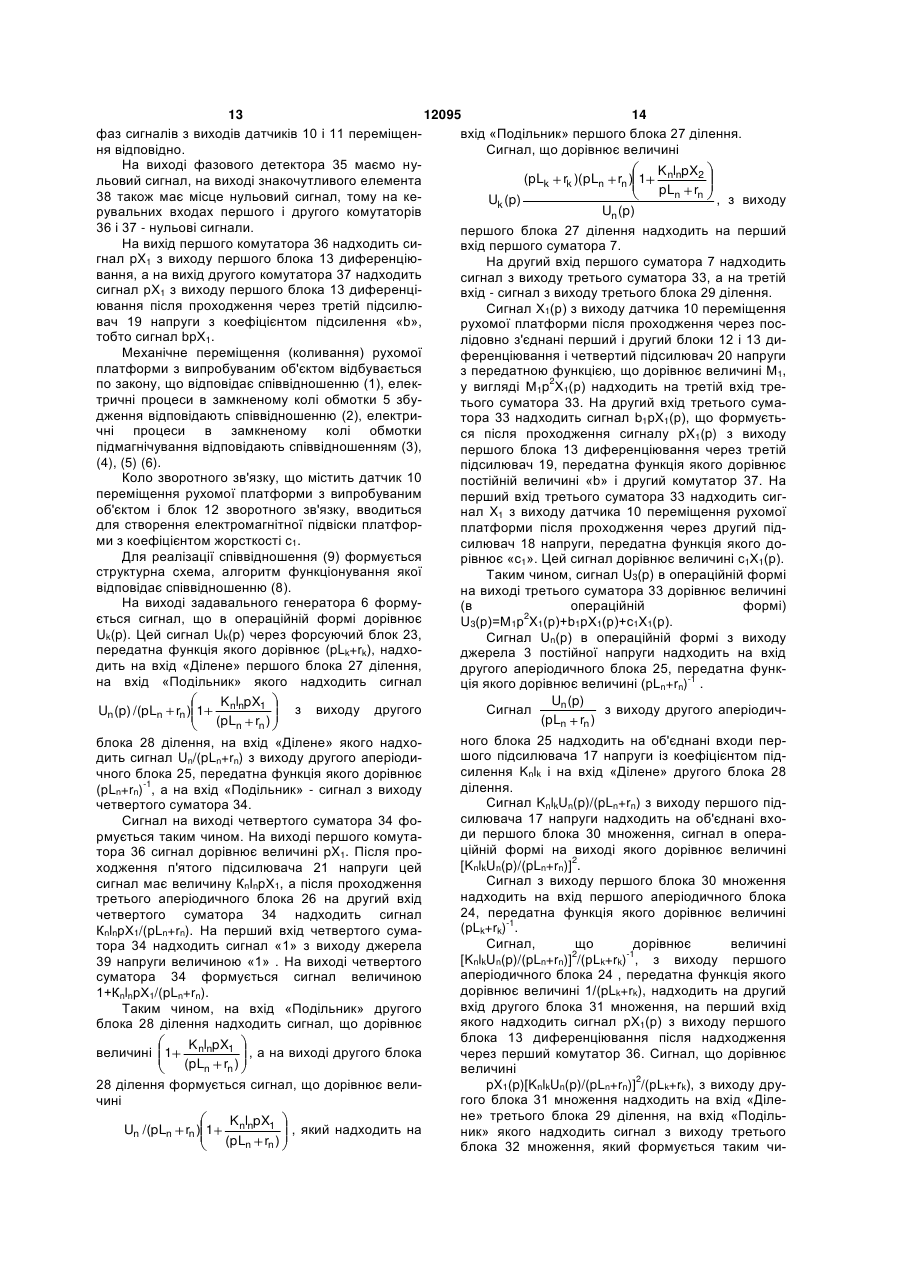
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, джерело постійної напруги величиною «Un», установлену в повітряному зазорі магнітопроводу рухому котушку, довжина якої більше довжини повітряного зазору, з обмоткою збудження, задавальний генератор, форсуючий блок, перший, другий, третій і четвертий суматори, підсилювач струму, перший і другий блоки диференціювання, перший, другий, третій, четвертий і п'ятий підсилювачі напруги, коло зворотного зв'язку, що містить послідовно з'єднані датчик переміщення рухомої платформи з випробуваним об'єктом і блок зворотного зв'язку, вихід якого з'єднаний з другим входом другого суматора, вихід якого через підсилювач струму з'єднаний з обмоткою збудження рухомої котушки, а перший вхід другого суматора з'єднаний з виходом першого суматора, послідовно з'єднані перший і другий блоки диференціювання, вхід першого з яких з'єднаний з датчиком переміщення рухомої платформи безпосередньо, а через другий підсилювач напруги з'єднаний з першим входом третього суматора, вихід першого блока диференціювання з'єднаний з входом третього підсилювача напруги, третій вхід третього суматора з'єднаний через четвертий підсилювач напруги з виходом другого блока диференціювання, перший, другий і третій аперіодичні блоки, перший, другий і третій блоки ділення, перший, другий і третій блоки множення, джерело постійної напруги величиною «1», причому вихід задавального генератора через форсуючий блок з'єднаний з входом «Ділене» першого блока ділення, вихід якого з'єднаний з першим входом першого суматора, другий вхід якого з'єднаний з виходом третього суматора безпосередньо, а третій вхід першого суматора з'єд U 2 (19) 1 3 12095 4 розбудження і моделювання різних типів вібраційсуматора, послідовно з'єднані перший і другий них навантажень. блоки диференціювання, вхід першого з яких з'єдВідомий електродинамічний вібратор, що міснаний з датчиком переміщення рухомої платфортить магнітопровід з обмоткою підмагнічування, ми безпосередньо, а через другий підсилювач наустановлену в повітряному зазорі магнітопроводу пруги з'єднаний з першим входом третього рухому циліндричну котушку, довжина якої більша суматора, другий вхід якого через третій підсилюдовжини повітряного зазору, задавальний генеравач напруги з'єднаний з виходом першого блока тор, перший і другий суматори, підсилювач струму, диференціювання, третій вхід третього суматора перший і другий блоки диференціювання, коло з'єднаний через четвертий підсилювач напруги з зворотного зв'язку, що містить послідовно з'єднані виходом другого блока диференціювання, перший датчик переміщення рухомої циліндричної котушки і другий аперіодичні блоки, перший блок ділення, і блок зворотного зв'язку, вихід якого з'єднаний з перший і другий блоки множення, при цьому вихід другим входом другого суматора, вихід якого чезадавального генератора через послідовно з'єдрез підсилювач струму з'єднаний з рухомою цилінані форсуючий блок і перший блок ділення з'єдндричною котушкою, вихід датчика переміщення наний з першим входом першого суматора, другий рухомої котушки з'єднаний з входом першого бловхід якого з'єднаний з виходом третього суматора ка диференціювання, вихід якого з'єднаний з вхобезпосередньо, один вхід другого блока множення дом другого блока диференціювання, перший, з'єднаний з виходом першого блока диференціюдругий, третій, четвертий і п'ятий підсилювачі навання, а другий вхід через послідовно з'єднані друпруги, форсуючий блок, третій блок диференціюгий аперіодичний блок, перший підсилювач напрування і третій суматор, причому вихід задавальноги, перший блок множення, перший і другий входи го генератора через послідовно з'єднані перший якого об'єднані, і перший аперіодичний блок з'єдпідсилювач напруги і форсуючий блок з'єднаний з наний з виходом джерела постійної напруги, припершим входом першого суматора, другий вхід стрій також додатково містить п'ятий підсилювач якого через третій блок диференціювання з'єднанапруги, третій аперіодичний блок, другий і третій ний з виходом третього суматора, перший вхід блоки ділення, третій блок множення, четвертий якого через другий підсилювач напруги з'єднаний з суматор і джерело постійної напруги величиною виходом датчика переміщення рухомої циліндрич«І», причому вихід першого блока диференціюної котушки, другий вхід через третій підсилювач вання через послідовно з'єднані п'ятий підсилювач напруги з'єднаний з виходом першого блока динапруги і третій аперіодичний блок з'єднаний з ференціювання, а третій вхід через четвертий піддругим входом четвертого суматора, перший вхід силювач напруги з'єднаний з виходом другого блоякого з'єднаний з виходом джерела постійної нака диференціювання, вихід датчика переміщення пруги величиною «1», а вихід четвертого суматора рухомої циліндричної котушки через п'ятий сумаз'єднаний з об'єднаними першим і другим входами тор з'єднаний з третім входом першого суматора. третього блока множення і входом «Подільник» [див. деклараційний патент України на винахід другого блока ділення, вхід «Ділене» якого з'єдна№45161, МПК В06В 1/04, 2001]. ний з виходом другого аперіодичного блока, а виНедоліком відомого пристрою є недостатня хід - з входом «Подільник» першого блока ділення, точність формування заданого силового навантавихід третього блока множення з'єднаний з входом ження на випробуваний об'єкт, що пояснюється «Подільник» третього блока ділення, вхід «Ділене» недостатньою точністю прийнятої для формування якого з'єднаний з виходом другого блока множеналгоритму керування математичної моделі електня, а вихід третього блока ділення з'єднаний з треродинамічного вібратора, яка враховує тільки метім входом першого суматора [див. деклараційний ханічні процеси його функціонування і електричні патент України №70115, МПК В06 В 1/04, 2004 p.]. процеси в обмотці котушки збудження і не врахоНедоліком відомого пристрою є недостатня вує всі електричні процеси з урахуванням зворотточність формування заданого силового навантаного зв'язку в обмотці котушки підмагнічування, що ження на випробуваний об'єкт, що пояснюється також призводить до зменшення К.К.Д. електродинедостатньою точністю прийнятої для формування намічного вібратора. алгоритму керування вібратора математичної моЗа найближчий аналог вибрано електродинаделі електродинамічного вібратора, яка враховує мічний вібратор, що містить магнітопровід з обмоелектричні процеси в обмотці котушки збудження і ткою підмагнічування, джерело постійної напруги підмагнічування і механічні процеси переміщення підмагнічування, установлену в повітряному зазорі рухомої системи вібратора. магнітопроводу рухому циліндричну котушку, довОднак, у відомому пристрої математична можина якої більше довжини повітряного зазору, задель, що описує механічний процес коливання давальний генератор, форсуючий блок, перший, рухомої системи електродинамічного вібратора другий і третій суматори, підсилювач струму, пер(платформи разом з випробуваним об'єктом і коший і другий блоки диференціювання, перший, тушкою збудження) відповідає діапазону низьких другий, третій і четвертий підсилювачі напруги, частот, тобто частотному діапазону, в якому маєколо зворотного зв'язку, що містить послідовно мо жорстке з'єднання платформи, випробуваного з'єднані датчик переміщення рухомої платформи з об'єкту і остову котушки збудження. Диференціакотушкою і блок зворотного зв'язку, вихід якого льне рівняння в цьому випадку відповідає коливаз'єднаний з другим входом другого суматора, вихід льній системі з одним ступенем вільності. якого через підсилювач струму з'єднаний з обмотДля електродинамічного вібратора в області кою збудження рухомої котушки, а перший вхід високих частот необхідно ураховувати гнучке з'єддругого суматора з'єднаний з виходом першого нання між платформою електродинамічного вібра 5 12095 6 тора і остовом котушки збудження. об'єднані і з'єднані з виходом четвертого суматоВ цьому діапазоні частот математична модель ра, перший вхід якого з'єднаний з виходом джерепроцесу коливання рухомої системи вібратора ла постійної напруги величиною «1», а другий вхід моделюється системою диференційних рівнянь, з'єднаний з виходом п'ятого підсилювача напруги які відповідають коливальній системі з двома стучерез третій аперіодичний блок, другий вхід другопенями вільності. го блока множення з'єднаний з виходом джерела Таким чином, відомий пристрій не враховує постійної напруги величиною «Un» через послідовзміни математичної моделі електродинамічного но з'єднані другий аперіодичний блок, перший підвібратора в різних частотних діапазонах при форсилювач напруги, перший блок множення, входи муванні заданого силового навантаження на виякого об'єднані, і перший аперіодичний блок, вихід пробуваний об'єкт, що обмежує функціональні другого аперіодичного блока з'єднаний з входом можливості пристрою, а це призводить також до «Ділене» другого блока ділення, вхід «Подільник» зниження ККД електродинамічного вібратора і обякого з'єднаний з виходом четвертого суматора, межує область його застосування. згідно з корисною моделлю, пристрій додатково В основу корисної моделі поставлене завданмістить датчик переміщення рухомої котушки з ня створити такий електродинамічний вібратор, в обмоткою збудження, третій і четвертий блоки якому за рахунок нової структурної схеми системи диференціювання, шостий підсилювач напруги, керування, що моделює процеси в механічній сисфазовий детектор, знакочутливий елемент, пертемі вібратора при урахуванні ділянок частотного ший і другий комутатори, причому вихід датчика діапазону при відтворенні вібрацій, відбувається переміщення рухомої котушки з обмоткою збурозширення частотного діапазону формування дження через послідовно з'єднані третій і четверзаданого силового навантаження на випробуваний тий блоки диференціювання і шостий підсилювач об'єкт, що призводить до підвищення ККД електнапруги з'єднаний з другим входом другого комуродинамічного вібратора і розширення області татора, перший вхід якого з'єднаний з виходом його застосування. третього підсилювача напруги, а вихід другого Поставлене завдання вирішується тим, що комутатора з'єднаний з другим входом третього електродинамічний вібратор, що містить магнітопсуматора, перший вхід першого комутатора з'єдровід з обмоткою підмагнічування, джерело поснаний з виходом першого блока диференціювантійної напруги величиною «Un», установлену в ня, а другий вхід - з виходом третього блока диповітряному зазорі магнітопроводу рухому котушференціювання, вихід першого комутатора ку, довжина якої більше довжини повітряного заз'єднаний з об'єднаними входом п'ятого підсилюзору, з обмоткою збудження, задавальний генеравача напруги і першим входом другого блока мнотор, форсуючий блок, перший, другий, третій і ження, керувальні входи першого і другого комутачетвертий суматори, підсилювач струму, перший і торів об'єднані і з'єднані з виходом знакочутливого другий блоки диференціювання, перший, другий, елемента, вхід якого з'єднаний з виходом фазовотретій, четвертий і п'ятий підсилювачі напруги, го детектора, перший і другий входи якого з'єднані коло зворотного зв'язку, що містить послідовно з виходом датчика переміщення рухомої платфоз'єднані датчик переміщення рухомої платформи з рми і виходом датчика переміщення рухомої котувипробуваним об'єктом і блок зворотного зв'язку, шки з обмоткою збудження. вихід якого з'єднаний з другим входом другого суЗастосування запропонованого електродинаматора, вихід якого через підсилювач струму з'єдмічного вібратора з усіма суттєвими ознаками, наний з обмоткою збудження рухомої котушки, а включаючи відмінні, дозволяє розширити частотперший вхід другого суматора з'єднаний з виходом ний діапазон формування заданого силового напершого суматора, послідовно з'єднані перший і вантаження на випробуваний об'єкт, що призводругий блоки диференціювання, вхід першого з дить до підвищення ККД і розширення області яких з'єднаний з датчиком переміщення рухомої застосування. платформи безпосередньо, а через другий підсиПояснюється це наступним. лювач напруги з'єднаний з першим входом третьоРозробка алгоритму формування заданого сиго суматора, вихід першого блока диференціюванлового навантаження на випробуваний об'єкт при ня з'єднаний з входом третього підсилювача відтворенні вібрації базується на наступних міркунапруги, третій вхід третього суматора з'єднаний ваннях. через четвертий підсилювач напруги з виходом Механічне переміщення рухомої системи вібдругого блока диференціювання, перший, другий і ратора в діапазоні низьких частот моделюється третій аперіодичні блоки, перший, другий і третій диференційним рівнянням другого порядку, що блоки ділення, перший, другий і третій блоки мновідповідає коливальній системі з одним ступенем ження, джерело постійної напруги величиною «1», вільності і в операційній формі має вигляд: причому вихід задавального генератора через (Мр2+bр+с)Х(р)+R(p)=Вn(р) lkIk(p), (1) форсуючий блок з'єднаний з входом «Ділене» де М- маса рухомої системи вібратора разом з першого блока ділення, вихід якого з'єднаний з випробуваним об'єктом; першим входом першого суматора, другий вхід b - коефіцієнт демпфування; якого з'єднаний з виходом третього суматора безс- коефіцієнт жорсткості підвіски рухомої сиспосередньо, а третій вхід першого суматора з'єдтеми вібратора; наний з виходом третього блока ділення безпосеХ(р) - операційне зображення переміщення редньо, вхід «Ділене» якого з'єднаний з виходом рухомої системи вібратора; другого блока множення, а вхід «Подільник» - з R(p) - операційне зображення сили реакції, що виходом третього блока множення, входи якого діє між випробуваним об'єктом і платформою віб 7 12095 8 ратора, жорстко з'єднаною з рухомою котушкою з магнічування; обмоткою збудження; ln - довжина дроту обмотки підмагнічування. Вn(р) - операційне зображення магнітної індукЗастосуємо також закон Ома для магнітного ції в повітряному зазорі магнітопровода, що форкола в операційній формі: мується при надходженні струму в обмотку підмаIn(p)Wn=Bn(p)S/G, (4) гнічування вібратора; де: Wn - кількість витків обмотки підмагнічуlk - довжина дроту обмотки котушки збудження; вання ; Ik(p)- операційне зображення струму, що протіG - магнітна провідність повітряного зазору, де кає в обмотці рухомої котушки збудження вібратознаходиться обмотка збудження рухомої котушки; ра; S - площа поперечного перерізу повітряного р=d/dt - оператор диференціювання. зазору магнітопроводу. Електричні процеси в замкненому колі обмотки Із (4) маємо співвідношення: (обмотки збудження) рухомої котушки вібратора КnІn(р)=Вn(р), (5) моделюється диференційним рівнянням першого де: Kn=GWn/S. порядку, що в операційній формі має вигляд: Із (3), (5) отримаємо таке співвідношення для (pLk+rk)Ik(p)=Uk(р)-Bn(p)lk pX(p), (2) визначення Bn(р): де: Lk - індуктивність обмотки рухомої котушки; K nUn (p) Bn (p) rk - опір обмотки рухомої котушки; КnlnpX (6) pLn rn 1 Uk(p)- операційне зображення напруги, що поpLn rn дається для живлення струмом Ik(p) обмотки збудження рухомої котушки. Електричні процеси в замкненому колі обмотки Із (2), (6) отримаємо співвідношення для викотушки підмагнічування для створення магнітної значення Ik(р): індукції в повітряному зазорі магнітопровода вібUk (p) K nlkUn (p)pX(p) ратора моделюються диференційним рівнянням Ik (p) першого порядку, що в операційній формі має ви(pLk rk ) КnlnpX(p) (7) (pLk rk )(pLn rn ) 1 гляд: pLn rn (pLn+rn)In(p)=Un(p)-Bn(p)lnpX(p) , (3) де: Ln - індуктивність обмотки підмагнічування; Приймаючи до уваги співвідношення (1), (6), rn - опір обмотки підмагнічування; (7) , отримаємо рівняння для визначення сили R(p) Іn(р)- операційне зображення струму, що протіреакції в операційній формі, що дорівнює заданокає в обмотці підмагнічування і створює магнітну му силовому навантаженню на випробуваний індукцію Вn(р), об'єкт: Un(p)- операційне зображення напруги, що подається для живлення струмом In(р) обмотки під Mp2 X(p) 2 2 2 K n l k Un (p) b (pL k rk )(pL n rn ) 1 k n l n pX(p) pL n rn 2 Для формування співвідношення: R(p)=KnlkUk(p) (9) необхідно розробити структурну схему, алгоритм функціонування якої відповідає співвідношенню (8), а саме, необхідно сформувати компенсаційну напругу для компенсації окремих додатних сил в операційній формі. Такі додатні сили мають вигляд: 22 2 K nlkUn (p)pX(p) Mp2 X(p), bX(p), (pLk rk )(pLn КnlnpX(p) rn ) 1 pLn rn 2 , cX(p) (10) При виконанні умови компенсації цих сил (10) із (8) отримаємо співвідношення : K nlkUn (p)Uk (p) R(p) . К l pX(p) (11) (pLk rk )(pLn rn ) 1 n n pLn rn Для виконання умови (9) необхідно провести корекцію напруги Uk (р) з виходу задавального генератора, а саме сформувати U*k(p) у вигляді: K n lk Un (p)Uk (p) pX(p) cX(p) R(p) (pL k (pLk * Uk (p) Uk (p) rk )(pL n rk )(pLn rn ) 1 rn ) 1 k n l n pX(p) (8) pL n rn KnlnpX(p) pLn rn (12) Un (p) і замість Uk(р) у співвідношенні (11) необхідно застосувати U*k(p). Враховуючи (11), (12), отримаємо співвідношення для визначення сили реакції R(p) R(p)=KnlkUk(p)=KuUk(p), (13) де: Ku=Knlk. При роботі електродинамічного вібратора в області високих частот, тобто при наявності нежорсткого зв'язку між остовом рухомої котушки і платформою вібратора, механічне переміщення рухомої платформи і остова котушки збудження вібратора моделюється системою двох диференціальних рівнянь другого порядку, що відповідає коливальній системі з двома ступенями вільності і в операційній формі при неврахуванні демпфування має вигляд 9 12095 M1p2 X1 c1X1 c 2 ( X1 X2 ) R 2 m2p X2 c 2 ( X2 X1 F2 0 10 (pLn+rn)In(p)=Un(p)-Bn(p)lnpX2(p), (16) де Ln - індуктивність обмотки котушки підмагнічування; rn - опір обмотки котушки підмагнічування; Іn(р) - операційне зображення струму, що надходить в обмотку підмагнічування; Un(p) - операційне зображення напруги, що подається для живлення струмом In(р) обмотки підмагнічування; ln - довжина дроту обмотки підмагнічування. Застосуємо також закон Ома для магнітного кола в операційній формі: In(p)Wn=B(p)S/G, (17) де: Wn - число витків обмотки підмагнічування; S - площа повітряного зазору магнітопроводу. G - магнітна провідність повітряного зазору. Із системи рівнянь (14) маємо таке співвідношення R1=M1p2X1+m2p2X2+c1Х1-F2. (18) Приймаючи до уваги (15), (16), (17), отримаємо співвідношення для визначення F2 в операційній формі, а саме, маємо систему рівнянь в операційній формі F2=BlkIk, (pLk+rk)lk=Uk-BlkpX2, (19) (pLn+rn)In=Un-BnlnpX2, InWn=BS/G, KnIn=B, Kn=WnG/S. Із третього і четвертого рівнянь системи (19) отримаємо співвідношення для визначення In в операційній формі knlnpX2 . In Un /(pLn rn ) 1 (20) (pLn rn ) (14) BlkIk ) де M1 - сумарна маса рухомої платформи вібратора разом з випробуваним об'єктом; m2 - маса остову котушки збудження вібратора; c1, с2 - коефіцієнти жорсткості підвіски платформи вібратора разом з випробуваним об'єктом і остову котушки збудження відповідно; Х1(р) - операційне зображення переміщення рухомої платформи вібратора разом з випробуваним об'єктом; Х2(р)- операційне зображення переміщення остова котушки збудження; R1(p)- операційне зображення сили реакції, що діє між випробуваним об'єктом і платформою вібратора; Вn(р)- операційне зображення магнітної індукції в повітряному зазорі магнітопровода, що формується при надходженні струму Іn(р) в обмотку підмагнічування вібратора; lk - довжина дроту обмотки котушки збудження; Ik(p)- операційне зображення струму, що надходить в обмотку рухомої котушки збудження вібратора; Р = d/dt - оператор диференціювання; p2= 2 d /dt2. Електродинамічні процеси в замкненому колі обмотки збудження вібратора моделюються диференційним рівнянням першого порядку, що в операційній формі має вигляд: (pLk+rk)Ik(р)=Uk(р)-В(р)lkpX2(р) (15) де: Lk - індуктивність обмотки котушки збудження; rk - опір обмотки рухомої котушки збудження; Uk(p) - операційне зображення напруги, що подається для живлення струмом обмотки збудження. Електричні процеси в замкненому колі обмотки котушки підмагнічування для створення магнітної індукції в повітряному зазорі магнітопровода вібратора моделюються диференційним рівнянням першого порядку, що в операційній формі має вигляд: F2 Blk Ik K n l k Un K n l k I n Ik (pL n rn ) 1 K n l n pX 2 pL n rn Із другого, третього і четвертого рівнянь системи (19) отримаємо співвідношення для визначення Іk в операційній формі Uk K nlkUnpX2 . Ik (pLk rk ) K nlnpX2 (21) (pLk rk )(pLn rn ) 1 pLn rn Приймаючи до уваги перше рівняння системи (19), а також співвідношення (20) і (21), отримаємо співвідношення для визначення F2 в операційній формі Uk (pL k rk ) K n lk pX 2 (pL k rk )(pL n rn ) 1 K n l n pX 2 pL n rn . K n l k Un Uk (pL k rk )(pL n rn ) 1 (22) 2 2 2 K n l k Un pX 2 K n l n pX 2 pL n rn (pL k rk )(pL n rn ) 1 K n l n pX 2 pL n rn 2 Застосовуючи співвідношення (18) і (22), отримаємо співвідношення для визначення R1 в операційній формі R1 M1p 2 X1 m 2p 2 X 2 2 2 2 K n lk Un pX 2 K n l k Un Uk c 1X1 (pL k rk )(pL n rn ) 1 K n ln pX 2 pL n rn (pL k rk )(pL n rn ) 1 K n ln pX 2 pL n rn 2 . (23) 11 12095 12 Для формування співвідношення R1=KnlkUk (24) вібратора через блок 12 зворотного зв'язку з'єднанеобхідно розробити структурну схему, алгоний з другим входом другого суматора 8, а через ритм функціонування якої відповідає співвіднодругий підсилювач 18 напруги - з першим входом шенню (23), а саме, необхідно сформувати сигнал третього суматора 33. Вихід датчика 10 перемідля компенсації окремих сил в операційній формі щення рухомої платформи вібратора через послі22 2 довно з'єднані перший і другий блоки 13, 14 дифеKnlkUnpX2 . M1p2 X1, m2p2 X2, c1X1, ренціювання відповідно і четвертий підсилювач 20 2 (25) KnlnpX2 напруги з'єднаний з третім входом третього сума(pLk rk )(pLn rn ) 1 pLn rn тора 33, другий вхід якого з'єднаний з виходом При умові компенсації цих сил маємо співвіддругого комутатора 37. ношення: Вихід третього суматора 33 з'єднаний з другим K nlkUnUk входом першого суматора 7, третій вхід якого з'єд. R1 наний з виходом третього блока 29 ділення, вхід K nlnpX2 (26) (pLk rk )(pLn rn ) 1 «Ділене» якого з'єднаний з виходом другого блока pLn rn 31 множення, другий вхід якого через послідовно з'єднані другий аперіодичний блок 25, перший підДля виконання умови (24) необхідно провести силювач 17 напруги, перший блок 30 множення, корекцію напруги Uk(p) з виходу задавального гедругий вхід якого об'єднаний з першим входом, нератора, а саме, сформувати Uk(p) у вигляді: перший аперіодичний блок 24 з'єднаний з виходом джерела 3 постійної напруги величиною «Un», що KnlnpX2 (pLk rk )(pLn rn ) 1 формує струм In обмотки підмагнічування вібратоpLn rn (27) * ра. Вихід п'ятого підсилювача 21 напруги з'єднаUk (p) Uk (p) Un (p) ний з входом третього аперіодичного блока 26, і замість Uk(p) у співвідношенні (3.6) необхідно вихід якого з'єднаний з другим входом четвертого застосувати Uk*(p). суматора 34, перший вхід якого з'єднаний з вихоНа кресленні приведена структурна схема дом джерела 39 напруги величиною «1». електродинамічного вібратора. Вихід четвертого суматора 34 з'єднаний з Електродинамічний вібратор містить магнітопоб'єднаними входами третього блока 32 множення ровід 1 з обмоткою 2 підмагнічування, джерело 3 і входом «Подільник» другого блока 28 ділення, постійної напруги величиною «Un», установлену в вихід якого з'єднаний з входом «Подільник» перповітряному зазорі магнітопровода 1 рухому цилішого блока 27 ділення, вхід «Ділене» якого з'єднандричну котушку 4 з обмоткою 5 збудження, заданий через форсуючий блок 23 з виходом задававальний генератор 6, перший і другий суматори 7, льного генератора 6. Вхід «Ділене» другого блока 8 відповідно, підсилювач 9 струму, датчик 10 пе28 ділення з'єднаний з виходом другого аперіодиреміщення рухомої платформи з випробуваним чного блока 25. об'єктом (на кресленні не показані), датчик 11 пеВихід датчика 11 переміщення рухомої котушреміщення рухомої котушки 4 з обмоткою 5 збуки 4 з обмоткою 5 збудження через послідовно дження, блок 12 зворотного зв'язку, перший, друз'єднаний третій і четвертий блоки 15 і 16 диферегий, третій і четвертий блоки 13, 14, 15, 16 нціювання і шостий підсилювач 22 напруги з'єднадиференціювання відповідно, перший, другий, ний з другим входом другого комутатора 37, пертретій, четвертий, п'ятий і шостий підсилювачі 17, ший вхід якого через третій підсилювач 19 напруги 18, 19, 20, 21 і 22 напруги відповідно, форсуючий з'єднаний з виходом першого блока 13 диференблок 23, перший, другий і третій аперіодичні блоки ціювання, вихід якого з'єднаний з першим входом 24, 25, 26 відповідно, перший, другий і третій блопершого комутатора 36, другий вхід якого з'єднаки 27, 28, 29 ділення відповідно, перший, другий і ний з виходом третього блока 15 диференціювантретій блоки 30, 31, 32 множення відповідно, треня, вихід першого комутатора 36 з'єднаний з об'єтій і четвертий суматори 33 і 34 відповідно, фазоднаними входами п'ятого підсилювача 21 напруги і вий детектор 35, перший і другий комутатори 36, другим входом другого блока 31 множення. Керу37, знакочутливий елемент 38, джерело 39 напрувальні входи першого і другого комутаторів 36 і 37 ги величиною «1». об'єднані і через знакочутливий елемент 38 з'єдБлоки і елементи електродинамічного вібранані з виходом фазового детектора 35, входи якотора з'єднані таким чином. го з'єднані з виходами датчиків 10 і 11 переміщенВихід першого блока 27 ділення з'єднаний з ня. першим входом першого суматора 7, вихід якого Електродинамічний вібратор функціонує таким через послідовно з'єднані другий суматор 8 і підчином. силювач 9 струму з'єднаний з обмоткою 5 збуЖивлення обмотки 5 збудження рухомої котудження, що розташована на рухомій котушці 4 шки 4 відбувається струмом з виходу підсилювача вібратора. 9 струму. При відсутності різниці фаз між платфоНа рухомій платформі вібратора розташовармою вібратора і остовом рухомої котушки 4 з обний випробуваний об'єкт і датчик 10 переміщення моткою 5 збудження платформа разом з рухомою рухомої платформи. котушкою 4 і випробуваним об'єктом переміщуєтьНа рухомій котушці 4 з обмоткою 5 збудження ся за рахунок дії електромагнітної сили, що пропорозташований датчик 11 переміщення рухомої рційна величині струму на виході підсилювача 9 котушки 4. струму. Датчик 10 переміщення рухомої платформи Такий випадок має місце при нульовій різниці 13 12095 14 фаз сигналів з виходів датчиків 10 і 11 переміщенвхід «Подільник» першого блока 27 ділення. ня відповідно. Сигнал, що дорівнює величині На виході фазового детектора 35 маємо нуKnlnpX2 (pLk rk )(pLn rn ) 1 льовий сигнал, на виході знакочутливого елемента pLn rn 38 також має місце нульовий сигнал, тому на ке, з виходу Uk (p) Un (p) рувальних входах першого і другого комутаторів 36 і 37 - нульові сигнали. першого блока 27 ділення надходить на перший На вихід першого комутатора 36 надходить сивхід першого суматора 7. гнал pX1 з виходу першого блока 13 диференціюНа другий вхід першого суматора 7 надходить вання, а на вихід другого комутатора 37 надходить сигнал з виходу третього суматора 33, а на третій сигнал рХ1 з виходу першого блока 13 диференцівхід - сигнал з виходу третього блока 29 ділення. ювання після проходження через третій підсилюСигнал Х1(р) з виходу датчика 10 переміщення вач 19 напруги з коефіцієнтом підсилення «b», рухомої платформи після проходження через постобто сигнал bрХ1. лідовно з'єднані перший і другий блоки 12 і 13 диМеханічне переміщення (коливання) рухомої ференціювання і четвертий підсилювач 20 напруги платформи з випробуваним об'єктом відбувається з передатною функцією, що дорівнює величині М1, по закону, що відповідає співвідношенню (1), елеку вигляді М1p2Х1(р) надходить на третій вхід третричні процеси в замкненому колі обмотки 5 збутього суматора 33. На другий вхід третього сумадження відповідають співвідношенню (2), електритора 33 надходить сигнал b1рХ1(р), що формуєтьчні процеси в замкненому колі обмотки ся після проходження сигналу pX1(p) з виходу підмагнічування відповідають співвідношенням (3), першого блока 13 диференціювання через третій (4), (5) (6). підсилювач 19, передатна функція якого дорівнює Коло зворотного зв'язку, що містить датчик 10 постійній величині «b» і другий комутатор 37. На переміщення рухомої платформи з випробуваним перший вхід третього суматора 33 надходить сигоб'єктом і блок 12 зворотного зв'язку, вводиться нал X1 з виходу датчика 10 переміщення рухомої для створення електромагнітної підвіски платфорплатформи після проходження через другий підми з коефіцієнтом жорсткості c1. силювач 18 напруги, передатна функція якого доДля реалізації співвідношення (9) формується рівнює «с1». Цей сигнал дорівнює величині с1Х1(р). структурна схема, алгоритм функціонування якої Таким чином, сигнал U3(p) в операційній формі відповідає співвідношенню (8). на виході третього суматора 33 дорівнює величині На виході задавального генератора 6 форму(в операційній формі) ється сигнал, що в операційній формі дорівнює U3(р)=М1р2X1(р)+b1рХ1(р)+с1X1(р). Uk(p). Цей сигнал Uk(p) через форсуючий блок 23, Сигнал Un(p) в операційній формі з виходу передатна функція якого дорівнює (pLk+rk), надходжерела 3 постійної напруги надходить на вхід дить на вхід «Ділене» першого блока 27 ділення, другого аперіодичного блока 25, передатна функна вхід «Подільник» якого надходить сигнал ція якого дорівнює величині (рLn+rn)-1 . Un (p) KnlnpX1 Сигнал з виходу другого аперіодичз виходу другого Un (p) /(pLn rn ) 1 (pLn rn ) (pLn rn ) ного блока 25 надходить на об'єднані входи перблока 28 ділення, на вхід «Ділене» якого надхошого підсилювача 17 напруги із коефіцієнтом піддить сигнал Un/(pLn+rn) з виходу другого аперіодисилення Knlk і на вхід «Ділене» другого блока 28 чного блока 25, передатна функція якого дорівнює ділення. (рLn+rn)-1, а на вхід «Подільник» - сигнал з виходу Сигнал KnlkUn(p)/(pLn+rn) з виходу першого підчетвертого суматора 34. силювача 17 напруги надходить на об'єднані вхоСигнал на виході четвертого суматора 34 фоди першого блока 30 множення, сигнал в оперармується таким чином. На виході першого комутаційній формі на виході якого дорівнює величині тора 36 сигнал дорівнює величині pX1. Після про[KnlkUn(p)/(pLn+rn)]2. ходження п'ятого підсилювача 21 напруги цей Сигнал з виходу першого блока 30 множення сигнал має величину КnInрХ1, а після проходження надходить на вхід першого аперіодичного блока третього аперіодичного блока 26 на другий вхід 24, передатна функція якого дорівнює величині четвертого суматора 34 надходить сигнал (рLk+rk)-1. КnlnрХ1/(pLn+rn). На перший вхід четвертого сумаСигнал, що дорівнює величині тора 34 надходить сигнал «1» з виходу джерела [KnlkUn(p)/(pLn+rn)]2/(рLk+rk)-1, з виходу першого 39 напруги величиною «1» . На виході четвертого аперіодичного блока 24 , передатна функція якого суматора 34 формується сигнал величиною дорівнює величині 1/(pLk+rk), надходить на другий 1+КnlnрХ1/(pLn+rn). вхід другого блока 31 множення, на перший вхід Таким чином, на вхід «Подільник» другого якого надходить сигнал рХ1(р) з виходу першого блока 28 ділення надходить сигнал, що дорівнює блока 13 диференціювання після надходження KnlnpX1 величині 1 , а на виході другого блока через перший комутатор 36. Сигнал, що дорівнює (pLn rn ) величині 28 ділення формується сигнал, що дорівнює величині KnlnpX1 , який надходить на Un /(pLn rn ) 1 (pLn rn ) pX1(p)[KnlkUn(p)/(pLn+rn)]2/(рLk+rk), з виходу другого блока 31 множення надходить на вхід «Ділене» третього блока 29 ділення, на вхід «Подільник» якого надходить сигнал з виходу третього блока 32 множення, який формується таким чи 15 12095 16 2 ном. U7 (p) K nlkUk (p) M1p X1(p) b1X1(p) c1X1(p) Сигнал Х1(р) з виходу першого блока 13 ди22 2 K nlk Un (p) ференціювання через перший комутатор 36 над2 ходить на вхід п'ятого підсилювача 21 напруги з K nlnpX1(p) коефіцієнтом підсилення Кnln, сигнал величиною (pLk rk )(pLn rn )2 1 pLn rn КnlnpХ1(р) з виходу якого надходить на вхід третього аперіодичного блока 26, передатна функція якоЦей сигнал після проходження через другий го дорівнює величині (рLn+rn)-1, а сигнал на виході суматор 8 і підсилювач 9 струму надходить в обякого дорівнює величині KnlnpX1(p)/(pLn+rn). мотку 5 збудження рухомої котушки 4, формуючи в Цей сигнал надходить на другий вхід четверобмотці 5 струм, який забезпечує виникнення ситого суматора 34, на перший вхід якого надходить ли, що діє на рухому котушку 4, жорстко з'єднану з сигнал величини «1» з виходу джерела 39 постійплатформою вібратора з жорстко установленим на ної напруги «1». ній випробуваним об'єктом. Сигнал з виходу четвертого суматора 34, що Сигнал з виходу датчика 10 переміщення руK nlnpX1(p) хомої платформи вібратора після проходження дорівнює величині 1 , надходить на через блок 12 зворотного зв'язку надходить на (pLn rn ) другий вхід другого суматора 8, формуючи електоб'єднані входи третього блока 32 множення і вхід ромагнітну підвіску рухомої платформи вібратора. «Подільник» другого блока 28 ділення. Приймаючи до уваги співвідношення (8), (9), Сигнал, що дорівнює величині (10), (11) (не враховуючи сигнал зворотного зв'язку 2 для стабілізації статичного положення платформи K nlnpX1(p) 1 , з виходу третього блока 32 мновібратора, який надходить з виходу датчика 10 (pLn rn ) переміщення платформи вібратора через блок 12 ження надходить на вхід «Подільник» третього зворотного зв'язку на другий вхід другого суматора блока 29 ділення, сигнал на виході якого дорівнює 8), отримаємо таке співвідношення в операційній величині формі R(p)=КuUk(р), тобто величина силової дії 2 R(р)на випробуваний об'єкт пропорційна сигналу K l pX (p) pX1(p) KnlkUn (p) /(pLn rn ) 2 / (pLk rk ) 1 n n 1 Uk(p) з виходу задавального генератора 6. (pLn rn ) При наявності гнучкого зв'язку між платформою вібратора з жорстко установленому на ній і надходить на третій вхід першого суматора 7. На випробуваному об'єкті і рухомою котушкою 4 з обдругий вхід першого суматора 7 надходить сигнал, 2 моткою збудження 5 має місце різниця фаз сигнащо дорівнює величині M1p X1(p)+b1X1(p)+c1X1(p) з лів, що надходять на входи фазового детектора 35 виходу третього суматора 33. з виходів датчиків 10 і 11 переміщення рухомої На перший вхід першого суматора 7 надхоплатформи і котушки. дить сигнал з виходу першого блока 27 ділення, На виході фазового детектора 35 формується який формується таким чином. сигнал, формується також одиничний сигнал на Сигнал Uk(р) з виходу задавального генератовиході знакочутливого елемента 38, який надхора 6 через форсуючий блок 23, передатна функція дить на керувальні входи першого і другого комуякого дорівнює величині (pLk+rk) надходить на вхід таторів 36 і 37 відповідно. В цьому режимі на вихід «Ділене» першого блока 27 ділення, на вхід «Попершого комутатора 36 надходить сигнал Х2 з видільник» якого надходить сигнал з виходу другого ходу датчика 11 переміщення рухомої котушки 4 з блока 28 ділення, який формується таким чином. обмоткою 5 збудження після проходження через На вхід «Ділене» другого блока 28 ділення натретій блок 15 диференціювання і який дорівнює дходить сигнал Un(р)/(pLn+rn) з виходу другого величині pX2. аперіодичного блока 25, а на вхід «Подільник» На другий вхід другого комутатора 37 надходругого блока 28 ділення надходить сигнал з видить сигнал Х2 з виходу датчика 11 переміщення ходу четвертого суматора 34, що дорівнює великотушки вібратора після проходження через перKnlnpX1(p) ший і другий блоки 15 і 16 диференціювання і шосчині 1 . (pLn rn ) тий підсилювач 22 напруги з коефіцієнтом підсилення m2. Таким чином, на виході другого Таким чином, сигнал на виході другого блока комутатора 37 формується сигнал, що дорівнює 28 ділення дорівнює величині величині m2p2X2. KnlnpX1(p) Таким чином, при наявності гнучкого зв'язку Un (p) / (pLn rn ) 1 . (pLn rn ) між платформою вібратора і котушкою з обмоткою збудження при формуванні напруги для відтвоЦей сигнал надходить на вхід «Подільник» рення заданої силової дії замість сигналу b1рХ1 з першого блока 27 ділення, вихідний сигнал якого виходу другого комутатора 37 застосовується сигдорівнює величині нал m2p2X2, а замість сигналу рХ1 з виходу першоKnlnpX1(p) го комутатора 36 застосовується сигнал рХ2. Uk (p)(pLk rk )(pLn rn ) 1 pLn rn В цьому режимі на виході першого блока 27 * і U k (p) , ділення формується сигнал, що дорівнює величині Un (p) (в операційній формі) надходить на перший вхід першого суматора 7. Таким чином, сигнал на виході першого суматора 7 дорівнює величині U7(p) 17 (pLk 12095 rk )(pLn rn ) 1 U*k (p) Uk (p) KnlnpX2 pLn rn 18 M1p2 X1 m2p2 X2 K nlkUnUk c1X1 (pLk , а Un (p) на виході першого суматора 7 формується сигнал rk )(pLn rn ) 1 K nlnpX2 pLn rn 22 2 K nlk UnpX2 (pLk rk )(pLn rn ) 1 K nlnpX2 pLn rn 2 , що необхідно для формування співвідношення (24), а саме: R1=KnlkUk*. Комп’ютерна верстка Г. Паяльніков Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrodynamic vibrator
Автори англійськоюPuz'ko Ihor Danylovych, Osipov Valerii Anatoliiovych
Назва патенту російськоюЭлектродинамический вибратор
Автори російськоюПузько Игорь Данилович, Осипов Валерий Анатольевич
МПК / Мітки
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Код посилання
<a href="https://ua.patents.su/9-12095-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Електродинамічний вібратор

Номер патенту: 60648
Опубліковано: 15.10.2003
Автор: Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, форсуючий блок, перший, другий і третій суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, яке має послідовно сполучені датчик переміщення рухомої платформи з котушкою і блок...
Електродинамічний вібратор
Номер патенту: 40446
Опубліковано: 16.07.2001
Автори: Пузько Ігор Данилович, Павловський Михайло Антонович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока...
Електродинамічний вібратор

Номер патенту: 45161
Опубліковано: 15.03.2002
Автори: Хворост Володимир Андрійович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку,...
Електродинамічний вібратор
Номер патенту: 70115
Опубліковано: 15.09.2004
Автор: Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, джерело постійної напруги підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, форсуючий блок, перший, другий і третій суматори, підсилювач струму, перший і другий блоки диференціювання, перший, другий, третій і четвертий підсилювачі напруги, коло...
Електродинамічний вібратор
Номер патенту: 44517
Опубліковано: 15.02.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, яка жорстко з'єднана з платформою вібратора з випробуваним об'єктом, задавальний генератор, вихід якого під'єднаний до входу другого суматора через перший суматор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної...
Попередній патент: Механізм подачі очисного комбайна
Наступний патент: Мазь протизапальна і ранозагоювальна
Випадковий патент: Спосіб утилізації токсичних речовин