Спосіб ітераційного визначення частоти гармонічного сигналу
Номер патенту: 123202
Опубліковано: 12.02.2018
Формула / Реферат
Спосіб ітераційного визначення частоти гармонічного сигналу, при якому приймають гармонічний сигнал за допомогою приймача, перетворюють сигнал за допомогою дискретизатора, фіксують перетворений сигнал за допомогою пристрою пам'яті, обробляють перетворений сигнал за допомогою частотного перетворювача з параметром N, визначають частоту гармонічного сигналу вимірювачем, відображають частоту гармонічного сигналу за допомогою дисплея, який відрізняється тим, що після фіксації перетвореного сигналу у пристрої пам'яті додатково встановлюють більше значення параметра N частотного перетворювача, оброблюють перетворений сигнал за допомогою частотного перетворювача з новим параметром і визначають нове значення частоти гармонічного сигналу, після визначення частоти гармонічного сигналу вимірюють похибку визначення частоти відносно попереднього значення за допомогою вимірювача, встановлюють граничний рівень визначення частоти, визначають відхилення похибки вимірювання від граничного рівня за допомогою компаратора, якщо відхилення більше граничного рівня, збільшують параметр N частотного перетворювача, у випадку, якщо відхилення не перевищує граничний рівень, відображають частоту гармонічного сигналу за допомогою дисплея.
Текст
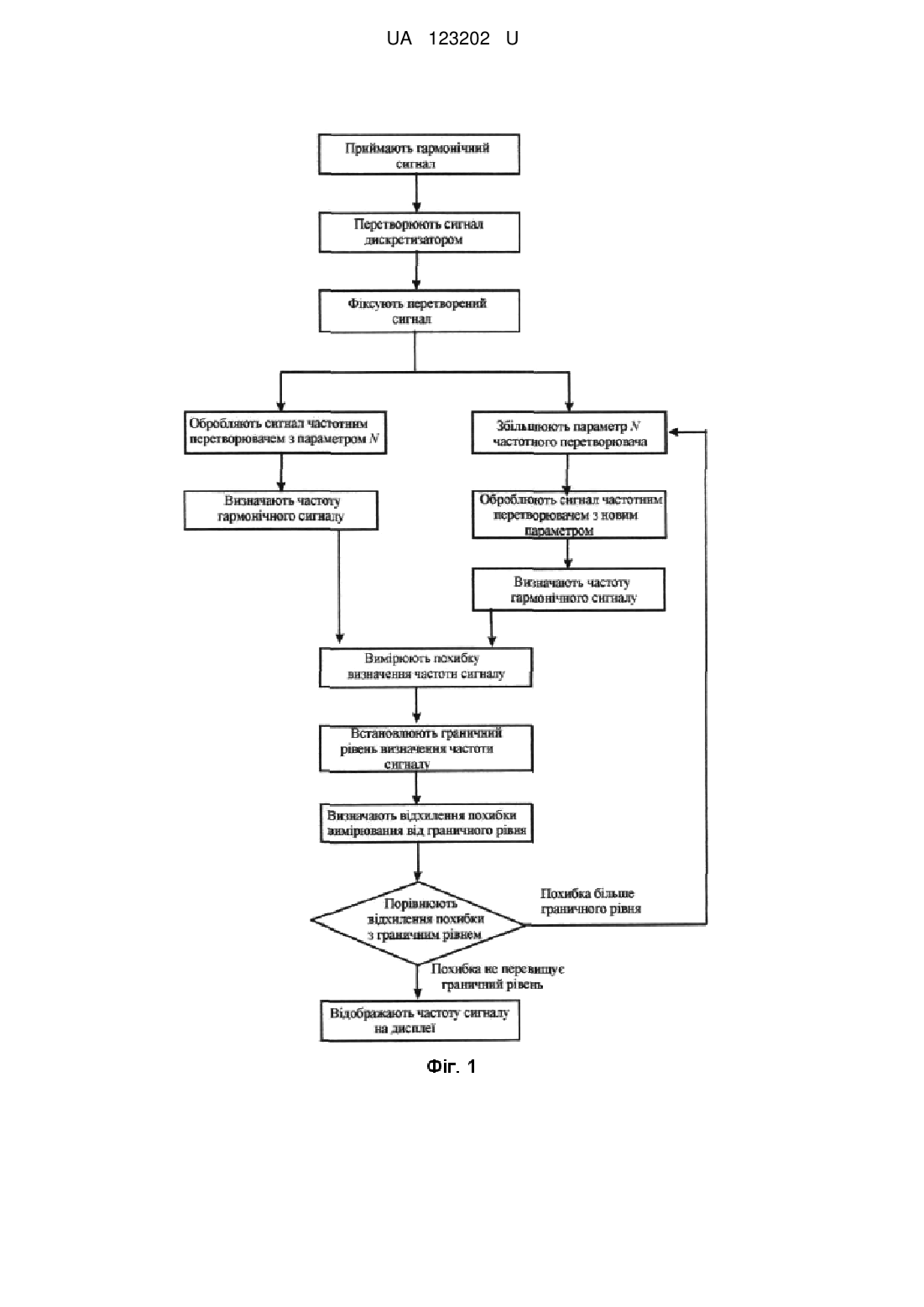
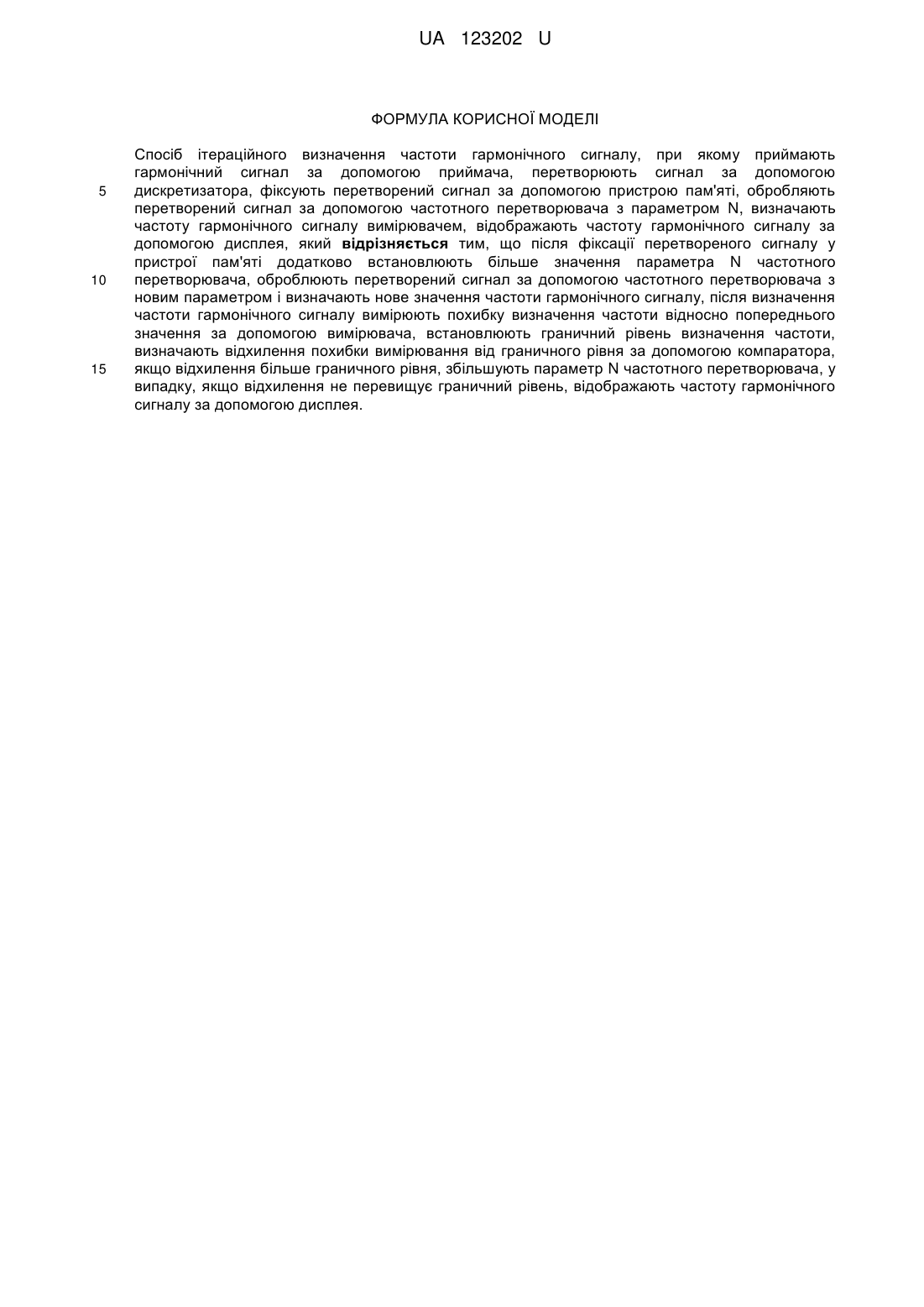
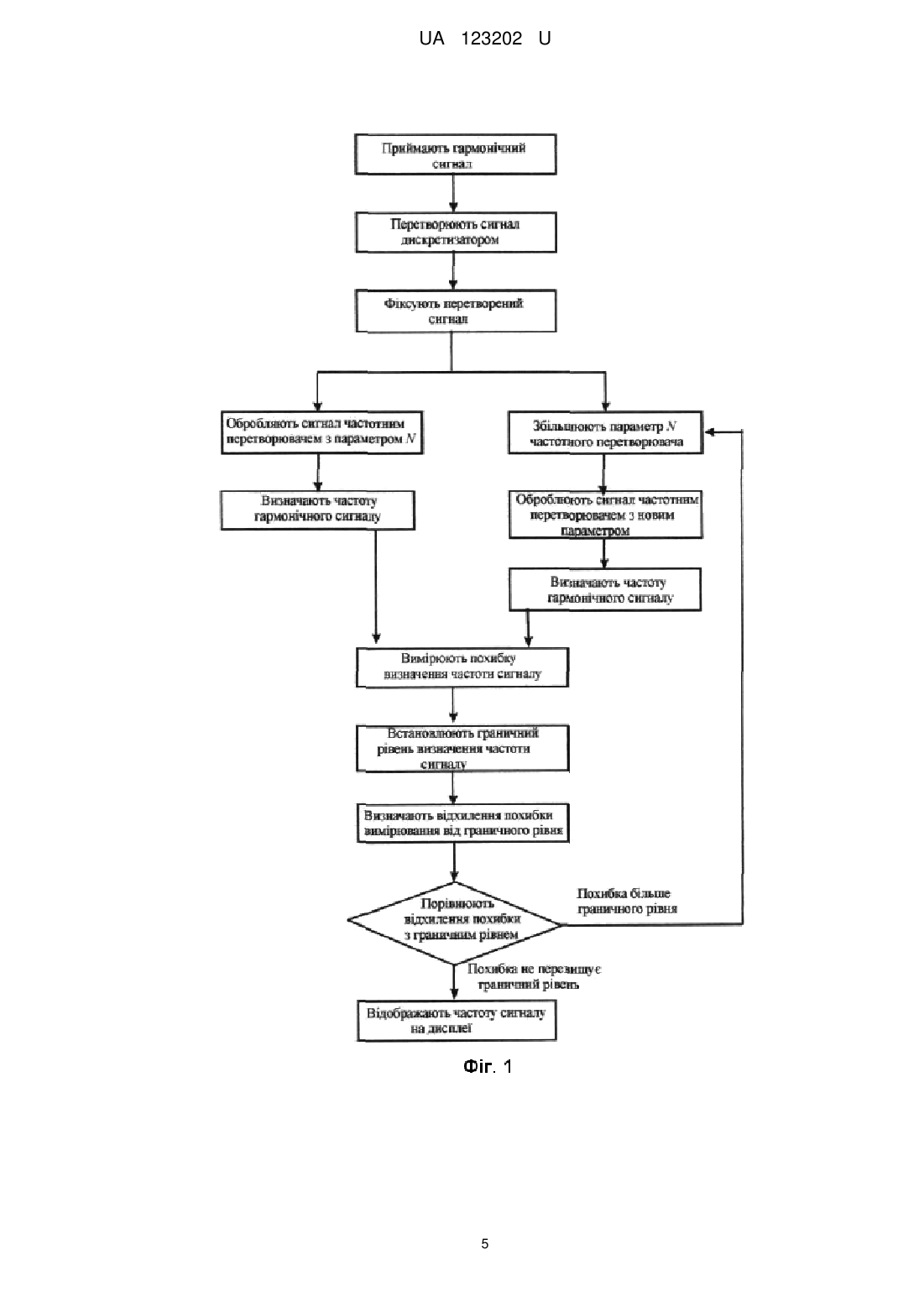
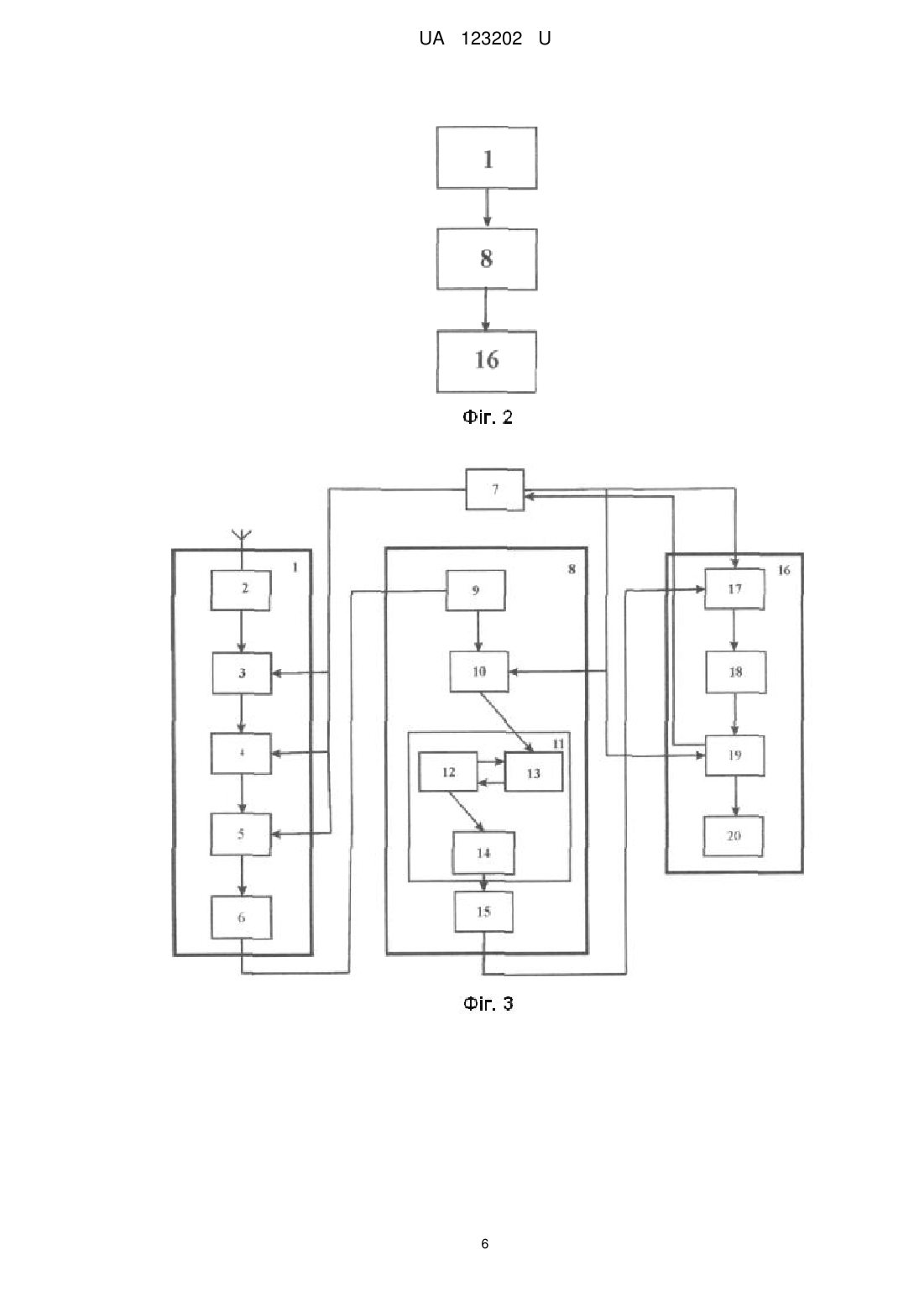
Реферат: Спосіб ітераційного визначення частоти гармонічного сигналу, при якому приймають гармонічний сигнал за допомогою приймача, перетворюють сигнал за допомогою дискретизатора, фіксують перетворений сигнал за допомогою пристрою пам'яті, обробляють перетворений сигнал за допомогою частотного перетворювача з параметром N, визначають частоту гармонічного сигналу вимірювачем, відображають частоту гармонічного сигналу за допомогою дисплея. При цьому після фіксації перетвореного сигналу у пристрої пам'яті додатково встановлюють більше значення параметра N частотного перетворювача, оброблюють перетворений сигнал за допомогою частотного перетворювача з новим параметром і визначають нове значення частоти гармонічного сигналу. Після визначення частоти гармонічного сигналу вимірюють похибку визначення частоти відносно попереднього значення за допомогою вимірювача, встановлюють граничний рівень визначення частоти, визначають відхилення похибки вимірювання від граничного рівня за допомогою компаратора. Якщо відхилення більше граничного рівня, збільшують параметр N частотного перетворювача, а якщо відхилення не перевищує граничний рівень, відображають частоту гармонічного сигналу за допомогою дисплея. UA 123202 U (54) СПОСІБ ІТЕРАЦІЙНОГО ВИЗНАЧЕННЯ ЧАСТОТИ ГАРМОНІЧНОГО СИГНАЛУ UA 123202 U UA 123202 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі вимірювальної техніки, зокрема до радіовимірювань частоти радіосигналів, що має місце в комплексах радіомоніторингу, панорамних радіоприймальних пристроях, а саме до способів визначення частоти. Вимірювання частоти гармонічних сигналів здійснюється розрахунковими або пошуковими методами. Розрахункові підходи застосовуються у вузькому частотному діапазоні, тому що мають невелику точність вимірювання. Пошукові методи вимірювання частоти характеризуються тривалим часом отримання кінцевого результату. Відомий спосіб визначення частоти гармонічного сигналу, який полягає у тому, що прийнятий сигнал перетворюють у дискретну форму, оброблюють перетворений сигнал частотним перетворювачем, підраховують кількість періодів сигналу в інтервалі спостереження та визначають частоту прийнятого сигналу [1]. Недоліком відомого способу вимірювання частоти гармонічного сигналу є значні обчислювальні витрати та необхідність великих обсягів пам'яті для виконання проміжних розрахунків на основі складного алгоритму, побудованого на вивченні кореляційних властивостей часової вибірки. Найбільш близьким технічним рішенням, як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є спосіб вимірювання частоти гармонічного сигналу, який полягає у прийманні гармонічного сигналу за допомогою приймача, перетворенні сигналу за допомогою дискретизатора, фіксації перетвореного сигналу за допомогою пристрою пам'яті, обробленні перетвореного сигналу за допомогою частотного перетворювача з параметром N , визначенні частоти гармонічного сигналу f0 вимірювачем, відображенні частоти гармонічного сигналу за допомогою дисплею [2]. До недоліків відомого способу вимірювання частоти сигналу, який вибрано за найближчий аналог (прототип), належать низька точність вимірювання частоти гармонічних сигналів за рахунок фіксації параметрів частотного перетворювача та введення генератора опорного сигналу, що приводить до значних похибок вимірювання при великих відхиленнях частоти вимірюваного сигналу від опорного. В основу корисної моделі поставлено задачу шляхом ітераційного оброблення у частотному перетворювачі забезпечити підвищення точності вимірювання частоти гармонічного сигналу. Суть способу ітераційного визначення частоти гармонічного сигналу, за яким приймають гармонічний сигнал за допомогою приймача, перетворюють сигнал за допомогою дискретизатора, фіксують перетворений сигнал за допомогою пристрою пам'яті, обробляють перетворений сигнал за допомогою частотного перетворювача з параметром N , визначають частоту гармонічного сигналу вимірювачем, відображають частоту гармонічного сигналу за допомогою дисплея, полягає в тому, що після фіксації перетвореного сигналу у пристрої пам'яті додатково встановлюють більше значення параметра N частотного перетворювача, оброблюють перетворений сигнал за допомогою частотного перетворювача з новим параметром і визначають нове значення частоти гармонічного сигналу, після визначення частоти гармонічного сигналу вимірюють похибку визначення частоти відносно попереднього значення за допомогою вимірювача, встановлюють граничний рівень визначення частоти, визначають відхилення похибки вимірювання від граничного рівня за допомогою компаратора, якщо відхилення більше граничного рівня, збільшують параметр N частотного перетворювача, у випадку, якщо відхилення не перевищує граничний рівень, відображають частоту гармонічного сигналу за допомогою дисплею. Порівняльний аналіз способу ітераційного визначення частоти гармонічного сигналу, який заявляється, із прототипом дозволяє дійти висновку, що спосіб ітераційного визначення частоти гармонічного сигналу, який заявляється, відрізняється тим, що після фіксації перетвореного сигналу у пристрої пам'яті встановлюють більше значення параметра частотного перетворювача N , після визначення частоти гармонічного сигналу f1 вимірюють похибку визначення частоти за допомогою вимірювача, встановлюють граничний рівень визначення частоти гармонічного сигналу, визначають відхилення похибки вимірювання частоти гармонічного сигналу від граничного рівня, якщо відхилення більше граничного рівня, збільшують параметр N частотного перетворювача, у випадку, якщо відхилення менше граничного рівня, відображають частоту гармонічного сигналу за допомогою дисплея. Суть способу ітераційного визначення частоти гармонічного сигналу пояснюється за допомогою креслень, де на фіг. 1 показано послідовність дій виконання способу ітераційного визначення частоти гармонічного сигналу, що заявляється, на фіг. 2 приведено блок-схему вимірювання частоти, що реалізує спосіб ітераційного визначення частоти гармонічного сигналу, який заявляється, на фіг. 3 представлений розгорнутий вигляд блок-схеми способу 1 UA 123202 U 5 10 15 20 25 30 35 40 45 50 55 ітераційного вимірювання частоти гармонічного сигналу, який заявляється, на фіг. 4 показано залежність частоти вимірювання від параметра N частотного перетворювача, на фіг. 5 показано залежність похибки вимірювання від номера ітерації k . Послідовність виконання дій в способі ітераційного визначення частоти гармонічного сигналу, що заявляється, пояснюється схемою на фіг. 1, де показано, що приймається сигнал, перетворюється у часову вибірку із заданою частотою дискретизації, запам'ятовується часова вибірка у пам'яті обчислювального пристрою, задається початкова кількість точок частотного перетворювача N , перетворений сигнал оброблюється частотним перетворювачем, визначається частота гармонічного сигналу, після фіксації перетвореного сигналу збільшують параметр N частотного перетворювача, оброблюють перетворений сигнал частотним перетворювачем з новим параметром, визначають нове значення частоти гармонічного сигналу, вимірюють похибку визначення частоти гармонічного сигналу шляхом знаходження різниці знайдених значень частот, встановлюють граничний рівень визначення похибки вимірювання, порівнюють похибку вимірювання частоти гармонічного сигналу із встановленим граничним рівнем, якщо результат більше заданого значення похибки, збільшують параметр частотного перетворювача N і проводять оброблення перетвореного сигналу в частотному перетворювачі з новим параметром, якщо результат не перевищує граничного рівня, відображають частоту гармонічного сигналу на дисплеї. Спосіб визначення частоти гармонічного сигналу реалізується за допомогою блок-схем, що містять (див. фіг. 2, фіг. 3), як варіант конструктивного виконання, приймальної частини 1, що складається з малошумного широкосмугового підсилювача 2, формувача смуги прийому 3, аналого-цифрового перетворювача 4, цифрового фільтра 5, цифрового квадратурного демодулятора 6, блока керування 7, частини попереднього оброблення дискретних сигналів 8, що складається з пам'яті образу прийнятого сигналу 9, обчислювача швидкого Фур'єперетворення 10, блока максимізатора 11, що складається з блоків квадратора 12, пам'яті 13, компаратора 14 та обчислювача частоти прийнятого сигналу 15. Блок-схема містить також і частину ітераційного обчислювання частоти прийнятого сигналу 16, який складається з блоків пам'яті 17, вимірювача відхилення f1 f0 18, компаратора 19, дисплею 20. Конструктивно вихід малошумного широкосмугового підсилювача 2 зв'язаний з входом формувача смуги прийому 3, з виходу котрого сигнал надходить на вхід аналого-цифрового перетворювача 4, вихід якого зв'язаний з входом цифрового фільтра 5. Вихід цифрового фільтра 5 зв'язаний з входом цифрового квадратурного демодулятора 6, з якого квадратурний образ прийнятого сигналу у цифровому вигляді надходить до блока пам'яті 9 частини попереднього оброблення вхідних сигналів 8. Виходи блока керування 7 зв'язані з входами блоків 3, 4, 5, 10, 17, 19. На вхід блока керування 7 подається сигнал з виходу блока (компаратора) 19. Вихід блока пам'яті 9 конструктивно зв'язаний з входом блока квадратора 12, виходи якого зв'язані з блоками 13 (блок пам'яті) та 14 (блок компаратора). Один з входів блока квадратора 12 зв'язаний з виходом блока пам'яті 13. Вихід блока компаратора 14 зв'язаний з входом блока обчислювача частоти прийнятого сигналу 15, вихід якого зв'язаний з входом блока пам'яті 17 частини ітераційного обчислювання частоти прийнятого сигналу 16. Вихід блока пам'яті 17 зв'язаний з входом блока вимірювача відхилення f1 f0 18, вихід якого підключений до входу блока компаратора 19. Основний вихід блока компаратора 19 зв'язаний з входом дисплея 20. Пристрій, виконаний за блок-схемою на фіг. 3, працює таким чином. На вхід приймальної частини 1 надходить гармонічний сигнал, частота якого підлягає визначенню. Після підсилення в малошумному широкосмуговому підсилювачі 2, дискретизації в формувачі смуги прийому 3 та перетворенні у дискретну форму в аналого-цифровому перетворювачі 4 прийнятий сигнал надходить до цифрового фільтра 5 та квадратурного цифрового демодулятора 6. Далі сигнал оброблюється у частині попереднього оброблення дискретних сигналів 8, де сигнал запам'ятовується у пам'яті образу прийнятого сигналу 9. З цим сигналом далі відбувається швидке Фур'є-перетворення у обчислювачі швидкого Фур'є-перетворення 10 відповідно до заданого параметра, далі над частотною вибіркою виконують операції введення в квадрат у блоці квадратора 12, їх запам'ятовування у блоці пам'яті 13, знаходження максимуму у блоці компаратора 14, та визначення частоти у блоці обчислювача частоти прийнятого сигналу 15. Далі відбувається аналогічне оброблення зі збільшеним параметром, інформація про який надходить з блока керування 7. Кінцеве значення частоти прийнятого сигналу визначається за допомогою частини ітераційного обчислювання частоти прийнятого сигналу 16, де відбувається порівняння результатів визначення частоти у блоці вимірювача відхилення f1 f0 18 та їх 2 UA 123202 U порівняння у блоці компаратора 19. Якщо рівень f , цикл визначення повторюється зі 5 збільшеним значенням параметру N , якщо рівень f , значення частоти прийнятого сигналу з виходу блока компаратора 19 надходить до дисплею 20. Система вимірювання частоти, за допомогою якої реалізується спосіб ітераційного визначення частоти гармонічного сигналу, пояснюється фізичною суттю таких процесів. На вхід приймальної вимірювальної системи подається корисний сигнал st в інтервалі t 0, 7 . Відповідно до принципу дискретизації сигнал st перетворюється у дискретну форму si , де i -номер часового відліку. Відповідно до логіки оброблення відбувається частотне перетворення сигналу за допомогою Фур'є-перетворення: Sk 10 N i se j2ik / N , (1) i 1 де N - кількість часових відліків у вибірці, що надходить з частотою дискретизації F 1 2f , f - верхня частота спектра діапазону сигналів, що аналізується. Далі відшукується сигнал з максимальною амплітудою в послідовності отриманих частотних відліків (2) Yk max max Yk . (2) 1k N 15 Визначення частоти здійснюється за виразом: k k max ˆ . (3) f F N Здійснюється частотне перетворення для збільшеної кількості часових відліків, що є новим параметром Фур'є-перетворення (1): N1 2N0 (4), отримують нове значення частоти сигналу f1 . Вимірюють похибку визначення частот f0 та 20 f1 : f1 f0 . (5) 25 30 35 40 45 Встановлюється граничне значення відхилення значення частоти f та порівнюють з ним похибку . Якщо виконується умова: f , (6) вважається, що частота знайдена із заданою точністю, якщо умова (6) не виконується, тоді операції (4) - (5) повторюються для нових значень N0 та N1 . При цьому в нових операціях оброблення та визначення частоти використовують попередні значення параметрів, тобто * * * N0 N1 , a N1 2N1 , де N1 - попереднє значення N1 . Моделювання системи оцінювання частоти вимірюваного параметра проводилося для сигналу косинусоїдальної форми амплітудою 1 В з частотою 10000 Гц, який приймається в інтервалі спостереження 10 с. Для оцінюваного сигналу виконується умова теореми Котельникова, тобто F 10000 Гц. Після частотного перетворення отримується частотний спектр. Вводиться граничний рівень похибки f 5 Гц. Після сьомої ітерації отримується частота гармонічного сигналу, значення якої дорівнюється fc 9998 Гц, що задовольняє встановленій точності розрахунку для параметра N 8192 (див. Фіг. 4, 5). Вважається, що при вимірюванні частота сигналу невідома, при дискретизації вхідного сигналу здійснюється невеликий зсув істинної частоти, який уточняється виразами (2) - (6). За результатами вимірів отримується значення частоти, що відображається на дисплеї. Похибка вимірювання при цьому зменшилася на 20 % порівняно, наприклад, з кількістю точок часової вибірки N 1024. Підвищення ефективності застосування способу ітераційного визначення частоти гармонічного сигналу досягається шляхом ітераційного визначення його частоти, що забезпечує підвищення точності вимірювання. Джерела інформації: 1. Патент РФ № 2478213 "Спосіб вимірювання частоти сигналу" від 27.03.2013 р., бюл. № 9 МПК (2006.01) G01R23/00 – аналог. 2. Патент РФ № 2591742 "Спосіб вимірювання частоті гармонійного сигналу та пристрій для його здійснення" від 20.07.2016 p., бюл. № 20 МПК (2006.01) G01R 23/00 - прототип. 50 3 UA 123202 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб ітераційного визначення частоти гармонічного сигналу, при якому приймають гармонічний сигнал за допомогою приймача, перетворюють сигнал за допомогою дискретизатора, фіксують перетворений сигнал за допомогою пристрою пам'яті, обробляють перетворений сигнал за допомогою частотного перетворювача з параметром N, визначають частоту гармонічного сигналу вимірювачем, відображають частоту гармонічного сигналу за допомогою дисплея, який відрізняється тим, що після фіксації перетвореного сигналу у пристрої пам'яті додатково встановлюють більше значення параметра N частотного перетворювача, оброблюють перетворений сигнал за допомогою частотного перетворювача з новим параметром і визначають нове значення частоти гармонічного сигналу, після визначення частоти гармонічного сигналу вимірюють похибку визначення частоти відносно попереднього значення за допомогою вимірювача, встановлюють граничний рівень визначення частоти, визначають відхилення похибки вимірювання від граничного рівня за допомогою компаратора, якщо відхилення більше граничного рівня, збільшують параметр N частотного перетворювача, у випадку, якщо відхилення не перевищує граничний рівень, відображають частоту гармонічного сигналу за допомогою дисплея. UA 123202 U 5 UA 123202 U 6 UA 123202 U Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 23/00
Мітки: гармонічного, ітераційного, частоти, спосіб, сигналу, визначення
Код посилання
<a href="https://ua.patents.su/9-123202-sposib-iteracijjnogo-viznachennya-chastoti-garmonichnogo-signalu.html" target="_blank" rel="follow" title="База патентів України">Спосіб ітераційного визначення частоти гармонічного сигналу</a>
Спосіб оцінювання частоти гармонічного сигналу обчислювальними засобами
Номер патенту: 122473
Опубліковано: 10.01.2018
Автори: Станіщук Андрій Богданович, Твердохлібов Володимир Віталійович, Пукас Олександр Олександрович, Костина Олег Миколайович, Оникієнко Людмила Сергіївна, Кучеров Дмитро Павлович, Рудаков Володимир Іванович, Голенківська Тетяна Ігоровна, Бичков Антон Миколайович, Березкін Андрій Леонідович
МПК: G01R 23/00, G06F 7/00
Мітки: оцінювання, обчислювальними, гармонічного, спосіб, частоти, засобами, сигналу
Формула / Реферат:
Спосіб оцінювання частоти гармонічного сигналу обчислювальними засобами, за яким приймають гармонічний сигнал, формують часову послідовність сигналів, розраховують дискретне Фур'є-перетворення, обчислюють квадрати модуля частотних відліків, визначають максимальні значення модуля квадрата частотних відліків, усувають неоднозначність виміру частоти вхідного гармонічного сигналу та отримують значення вимірюваного параметра, за яким проводять...
Спосіб вимірювання частоти і періоду гармонічного сигналу та пристрій для його здійснення
Номер патенту: 81851
Опубліковано: 11.02.2008
Автори: Кіріанакі Микола Володимирович, Юриш Сергій Юрійович
МПК: G01R 23/00
Мітки: гармонічного, вимірювання, спосіб, сигналу, пристрій, періоду, здійснення, частоти
Формула / Реферат:
1. Спосіб вимірювання частоти і періоду гармонічного сигналу, який полягає в тому, що одночасно рахують число імпульсів вимірюваної і зразкової частот, неперервно порівнюють число підрахованих імпульсів зразкової частоти із заданим числом припинення лічби, відповідно до значення наперед заданої відносної похибки квантування, фіксують рівність із заданим числом числа імпульсів зразкової частоти, припиняють лічбу імпульсів обох частот з появою...
Спосіб вимірювання частоти гармонічного сигналу
Номер патенту: 41445
Опубліковано: 25.05.2009
Автори: Омельчук Ігор Павлович, Прокопенко Ігор Григорович
МПК: G01R 23/00
Мітки: сигналу, гармонічного, частоти, вимірювання, спосіб
Формула / Реферат:
Спосіб вимірювання частоти гармонічного сигналу, який полягає у накопиченні суми квадратів відліків , , окрім першого та останнього, з вибірки, розміром , вхідних відліків
Спосіб оцінювання частоти гармонічного сигналу на тлі завади
Номер патенту: 81181
Опубліковано: 25.06.2013
Автори: Вовк Віталій Юрійович, Омельчук Ігор Павлович, Прокопенко Ігор Григорович
МПК: G01R 23/00
Мітки: сигналу, гармонічного, оцінювання, спосіб, частоти, завади, тлі
Формула / Реферат:
Спосіб оцінювання частоти гармонічного сигналу на тлі завади, який полягає у послідовному вимірюванні із постійним інтервалом часової дискретизації вхідних відліків , у кількості
Спосіб виміру девіації частоти гармонічного сигналу та пристрій для його здійснення
Номер патенту: 35945
Опубліковано: 16.04.2001
Автори: Пивовар Олег Сергійович, Троцишин Іван Васильович
МПК: G01R 25/00, G01R 23/00
Мітки: гармонічного, частоти, сигналу, пристрій, спосіб, девіації, здійснення, виміру
Формула / Реферат:
1. Спосіб вимірювання девіації частоти, оснований на перенесенні спектру модулюючого сигналу на проміжну частоту, виділенні різницевої частоти у частотно-модульованого сигналу та визначенні числа нулів перетвореного сигналу, який відрізняється тим, що додатково вимірюють фазовий зсув між модульованим сигналом та немодульованою несучою на початку та наприкінці інтервалу виміру, що кратний половині періоду синхронно із вимірюванням кількості...
Попередній патент: Спосіб оптимізації системи надання нефрологічної допомоги дітям із інфекційно-запальними захворюваннями сечовидільної системи
Наступний патент: Спосіб визначення тяжкості отруєння монооксидом вуглецю
Випадковий патент: Свинцево-кислотна акумуляторна батарея