Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
Формула / Реферат
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным элементом, при этом устройство снабжено замыкающей плоской аэростатической опорой, подвижный элемент которой жестко соединен с подвижным элементом упомянутой плоской аэростатической опоры и расположен перпендикулярно последнему между двумя основаниями неподвижного элемента со встроенными в них жиклерами подачи газа в зазоры между подвижным и неподвижным элементами замыкающей аэростатической опоры, кроме того устройство включает не менее трех блоков датчиков величин зазоров, в каждом из которых на одинаковом расстоянии друг от друга установлены первый и второй датчики величин зазоров, установленные на одном из оснований плоской аэростатической опоры, не менее трех, по числу блоков датчиков величин зазоров, пар регуляторов положения подвижного элемента плоской аэростатической опоры, установленных на обоих основаниях плоской аэростатической опоры попарно, причем каждая пара регуляторов положения подвижного элемента электрически связана с соответствующей парой блоков датчиков величин зазоров через блок стабилизации положения подвижного элемента плоской аэростатической опоры, содержащий цифровой блок, датчик величины линейного перемещения подвижного элемента плоской аэростатической опоры, измеритель величины линейного перемещения подвижного элемента плоской аэростатической опоры, операционные усилители, переключатели, дифференциальные усилители, причем первые и вторые датчики величин зазоров блоков датчиков величин зазоров соединены с входами измерителей величин зазоров, а их выходы соединены с входами цифрового блока, выходы измерителей величин зазоров по сигналам вторых датчиков величин зазоров через переключатель "включено - выключено" соединены с первыми входами дифференциальных усилителей, датчик величины линейного перемещения подвижного элемента плоской аэростатической опоры соединен с входом измерителя величины линейного перемещения подвижного элемента плоской аэростатической опоры, а его выход соединен с входом цифрового блока, входы операционных усилителей соединены с выходами цифрового блока, выходы операционных усилителей через переключатели "прямое - выключено - обратное" соединены с входами дифференциальных усилителей, вторые входы дифференциальных усилителей через переключатель "включено - выключено" соединены с выходами цифрового блока, выходы дифференциальных усилителей соединены с регуляторами положения подвижного элемента плоской аэростатической опоры.
Текст
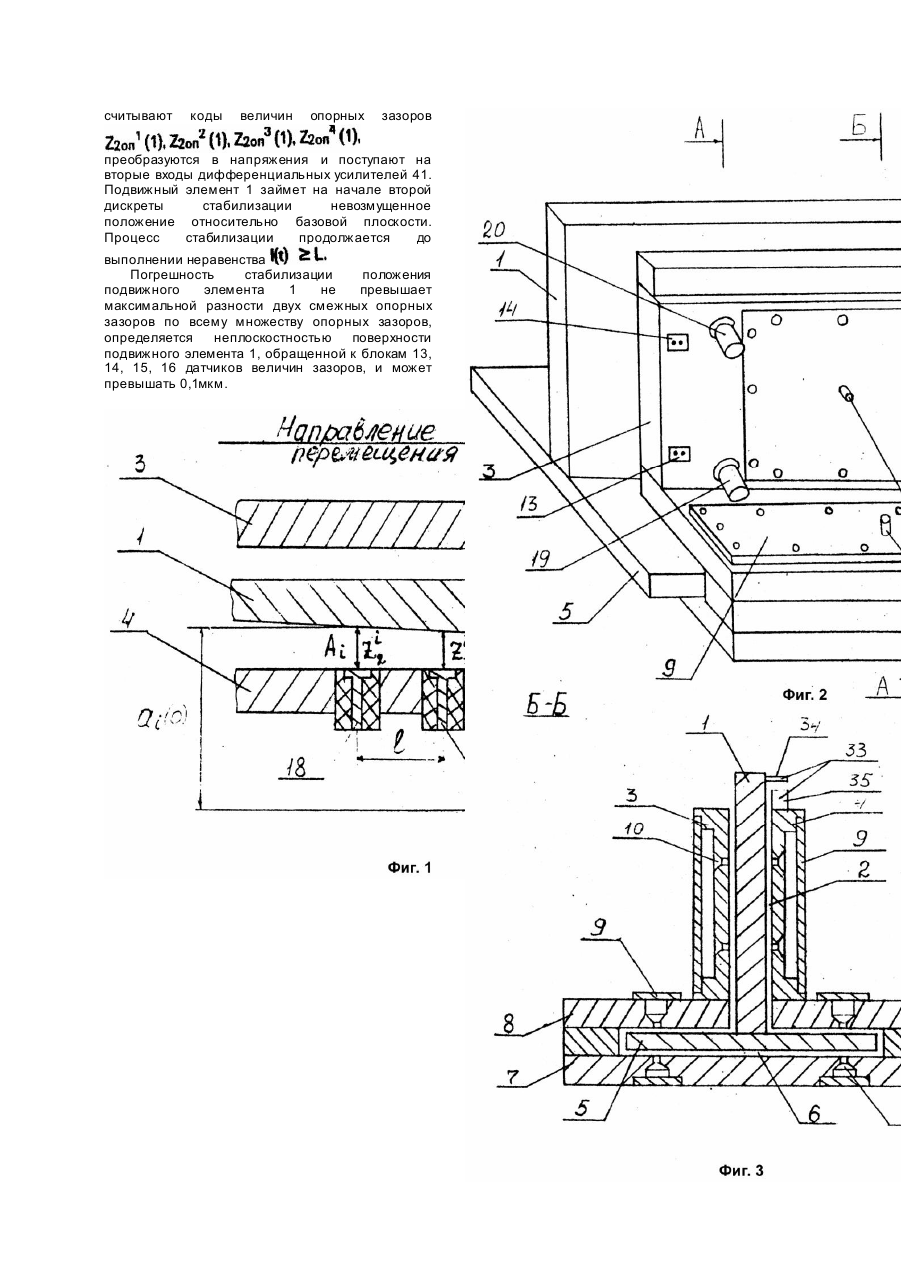
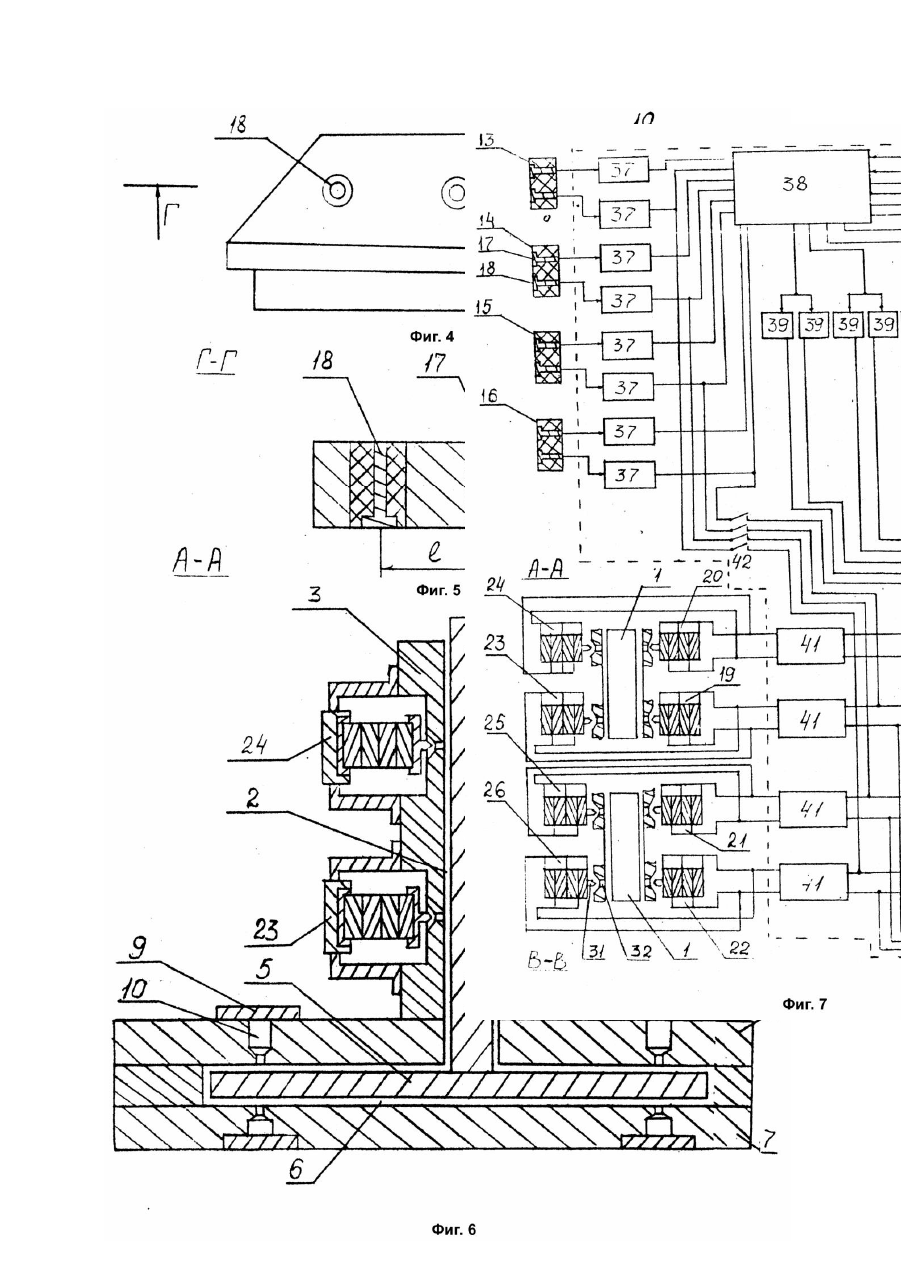
Изобретение относится к станкостроению и может использоваться при конструировании, например, прецизионных шлифовальных станков для точного перемещения заготовки в плоскости шлифования. Известно устройство стабилизации положения подвижного элемента плоской аэростатической опоры, раскрытое в а.с. №548734, кл F16C32/06, опубл. 28.02.77, Бюл. №8, содержащее подвижный элемент из немагнитного материала и неподвижный элемент из немагнитного материала и регуляторы положения подвижного элемента плоской аэростатической опоры, при этом в неподвижном элементе выполнена приемная камера для смазки, сообщающаяся через каналы подвода и питающие отверстия с рабочим зазором, а также дроссели с регулируемыми элементами, размещенными в упомянуты х каналах. Основными недостатками прототипа являются следующие. Регулирование положения подвижного элемента за счет изменения магнитных сил отталкивания, источником которых является подвижный элемент, при* водит к тому, что наличие микронеровностей на его основании вызывает микросмещения самого подвижного элемента. Принцип стабилизации, реализуемый прототипом, обеспечивает постоянную толщин у газового слоя между основанием подвижного элемента и поверхностью неподвижного элемента. Это приводит к тому, что изменение наклона (неплоскостность) поверхности неподвижного элемента вызывает перекос подвижного элемента. Подвижный элемент прототипа может перемещаться в ограниченной области над поверхностью неподвижного элемента. Задачей, на решение которой направлено изобретение, является такое усовершенствование устройства стабилизации положения подвижного элемента плоской аэростатической опоры, при котором обеспечивается повышение несущей способности подвижного элемента без его смещения относительно неподвижной (базовой) плоскости, при этом перекос подвижного элемента плоской аэростатической опоры из-за неплоскостности поверхности неподвижного элемента не превышает величины этой неплоскостности на длине поверхности неподвижного элемента, равной дискрете стабилизации положения подвижного элемента плоской аэростатической опоры и может не превышать 0,1мкм. Решение этой задачи достигается тем, что в устройстве стабилизации положения подвижного элемента плоской аэростатической опоры, включающем подвижный элемент плоской аэростатической опоры, неподвижный элемент плоской аэростатической опоры, регуляторы положения подвижного элемента плоской аэростатической опоры, согласно изобретению, неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоры между этими основаниями и размещенным между ними подвижным элементом, при этом устройство снабжено замыкающей плоской аэростатической опорой, подвижный элемент которой жестко соединен с подвижным элементом упомянутой плоской аэростатической опоры и расположен перпендикулярно последнему между двумя основаниями неподвижного элемента со встроенными в них жиклерами подачи газа в зазоры между подвижным и неподвижным элементами замыкающей аэростатической опоры, кроме того устройство включает не менее трех блоков датчиков величин зазоров, в каждом из которых на одинаковом расстоянии друг от друга установлены первый и второй датчики величин зазоров, установленные на одном из оснований плоской аэростатической опоры, не менее трех, по числу блоков датчиков величин зазоров, пар регуляторов положения подвижного элемента плоской аэростатической опоры попарно, установленных на обоих основаниях плоской аэростатической опоры, причем, каждая пара регуляторов положения подвижного элемента электрически связана с соответствующим блоком датчиков величин зазоров через блок стабилизации положения подвижного элемента плоской аэростатической опоры, содержащий цифровой блок, датчик величины линейного перемещения подвижного элемента плоской аэростатической опоры, измеритель величины линейного перемещения подвижного элемента плоской аэростатической опоры, операционные усилители, переключатели, дифференциальные усилители, причем, первые и вторые датчики величин зазоров блоков датчиков величин зазоров соединены с входами измерителей величин зазоров, а их выходы соединены с входами цифрового блока, выходы измерителей величин зазоров по сигналам вторых датчиков величин зазоров через переключатель "включено выключено" соединены с первыми входами дифференциальных усилителей, датчик величины линейного перемещения подвижного элемента плоской аэростатической опоры соединен с входом измерителя величины линейного перемещения подвижного элемента плоской аэростатической опоры, а его выход соединен с входом цифрового блока, входы операционных усилителей соединены с выходами цифрового блока, выходы операционных усилителей через переключатели "прямое - выключено - обратное" соединены с входами дифференциальных усилителей, вторые входы дифференциальных усилителей через переключатель "включено выключено" с выходами цифрового блока, выходы дифференциальных усилителей соединены с регуляторами положения подвижного элемента плоской аэростатической опоры. Причинно-следственная связь между совокупностью существенных признаков заявляемого изобретения и достигаемым техническим результатом заключается в следующем. Пусть подвижный элемент 1 (фиг.1) плоской аэростатической опоры (фиг.2, 3), положение которого стабилизируется относительно неподвижной плоскости (фиг.1) перемещается между основаниями 3 и 4 (фиг.1), в которых выполнены жиклеры 10 подачи газа в зазоры 2 этой опоры (фиг.3). Силовое замыкание подвижного элемента 1 обеспечивается замыкающей плоской аэростатической опорой (фиг.3), подвижный элемент 5 которой перемещается между основаниями 7 и 8, в которых выполнены жиклеры 10 подачи газа в зазоры 6 этой опоры, перпендикулярен плоскости стабилизации подвижного элемента 1 и скреплен с ним. Пусть также в основании 4 плоской аэростатической опоры симметрично относительно его боковых граней установлены (фиг.2) блоки 13, 14, 15, 16 датчиков величин зазоров. Каждый из блоков 13, 14, 15, 16 датчиков (фиг.4) содержит первый (по направлению перемещения) датчик 17 величины зазора и второй датчик 18 величины зазора (фиг.5). Таким образом, измеряются величины зазоров между основаниями датчиков 17,18 блоков 13, 14, 15, 16 датчиков и поверхностью подвижного элемента 1. Пусть основания первых и вторых датчиков 17 и 18 всех блоков 13, 14, 15, 16 датчиков (фиг.1) лежат в одной плоскости, параллельной неподвижной плоскости Расстояния между центрами оснований первого и второго датчиков 17, 18 в каждом блоке 13, 14, 15, 16 датчиков равны между собой и равны дискрете стабилизации Зафиксируем положение подвижного элемента 1 и примем это положение в качестве исходного для перемещения подвижного элемента 1 в заданном направлении (фиг.1). В исходном положении подвижного элемента 1 измеряют величины зазоров под вторыми датчиками 18 каждого блока датчиков в данном примере) и запоминают их в качестве опорных зазоров Тогда (фиг.1) расстояния от точек поверхности подвижного элемента 1, расположенных над центрами оснований вторых датчиков 18 каждого блока датчиков до неподвижной (базовой) плоскости соответственно равны Перемещают подвижный элемент 1 вправо (фиг.1) на расстояние, равное величине дискреты стабилизации В общем случае подвижный элемент 1 после перемещения на расстояние под воздействием возмущающи х факторов займет относительно оснований датчиков 17, 18 величин зазоров каждого блока датчиков случайное положение. Смещают подвижный элемент 1 по высоте зазора и устанавливают под первыми датчиками 17 величины зазоров равные соответствующим величинам опорных зазоров Следовательно после перемещения подвижного элемента 1 на расстояние и выполнения описанных действий расстояния от точек до базовой плоскости не изменились. Поэтому не изменилось и положение подвижного элемента 1 относительно неподвижной (базовой) плоскости После первого перемещения подвижного элемента 1 на расстояние и установки под первыми датчиками 17 величин зазоров, равных опорным, снова измеряют величины зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков и запоминают их в качестве опорных зазоров для установки подвижного элемента 1 в невозмущенное положение после второго перемещения на расстояние Описанную выше процедуру с дискретностью выполняют до перемещения подвижного элемента 1 на заданное расстояние Полученные величины опорных зазоров где запоминают. Для управления положением подвижного элемента 1 на основаниях 3 и 4 плоской аэростатической опоры симметрично относительно блоков 13, 14, 15, 16 датчиков (фиг.2) и напротив друг др уга (фиг.6) установлены регуляторы 19, 20, 21, 22, 23, 24, 25, 26 положения подвижного элемента плоской аэростатической опоры (фиг.6). Таким образом, для расширения диапазона воспринимаемых нагрузок опора 2 выполняется двухсторонней, а регуляторы положения подвижного элемента 1 устанавливают на обоих ее основаниях 3 и 4. Величина перемещения подвижного элемента 1 зависит от длины самого подвижного элемента 1 и может значительно превышать длину неподвижного элемента 3 - 4. В процессе стабилизации положения подвижного элемента 1 плоской аэростатической опоры на каждой дискрете стабилизации сравнивают текущие значения величин зазоров t Причем после перемещения подвижного элемента 1 из исходного положения на расстояние точки подвижного элемента 1 расположились над центрами оснований первых датчиков 17, а после установки под первыми датчиками 17 величин зазоров, равных величинам соответствующи х опорных зазоров, расстояния от этих точек до базовой плоскости будут равны соответствующим расстояниям в начальном положении подвижного элемента 1 до базовой плоскости под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков с величинами соответствующи х опорных зазоров для дискреты, стабилизации. При отклонении упомянуты х текущи х значений величин зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков от соответствующи х опорных зазоров, на регуляторы положения подвижного элемента формируют сигналы управления, предотвращающие это отклонение. Таким образом, погрешность стабилизации положения подвижного элемента 1 плоской аэростатической опоры, независимо от дальности его перемещения, равна погрешности его положения на дискрете стабилизации и на дискрете стабилизации определяется величинами разностей опорных зазоров на смежных дискретах стабилизации: Величина этой погрешности для неплоскостности поверхности подвижного элемента 1 класса точности "ноль" зависит от величины дискреты стабилизации и при не превышает 0,1мкм. На фиг.1 показана иллюстрация заявляемого принципа стабилизации подвижного элемента плоской аэростатической опоры; на фиг.2 - общий вид механической части заявляемого устройства стабилизации положения подвижного элемента плоской аэростатической опоры; на фиг.3 сечение Б - Б на фиг.2; на фиг.4 - блок датчиков величин зазоров; на фиг.5 - сечение А - А на фиг.4; на фиг.6 - сечение А - А на фиг.2; на фиг.7 функциональная электрическая схема устройства стабилизации положения подвижного элемента плоской аэростатической опоры; на фиг.8 - блоксхема модуля ввода-вывода информации (ввод информации внешних функциональных элементов); на фиг.9 - блок-схема модуля вводавывода информации (вывод информации на внешние функциональные элементы). Устройство стабилизации положения подвижного элемента плоской аэростатической опоры включает подвижный элемент 1, установленный с зазорами 2 между основаниями 3 и 4, образующими неподвижный элемент 3, 4 этой плоской аэростатической опоры 1, 3, 4 (фиг.2, 3), устройство снабжено также замыкающей плоской аэростатической опорой. Подвижный элемент 5 замыкающей плоской аэростатической опоры жестко соединен с подвижным элементом 1 плоской аэростатической опоры и расположен перпендикулярно последнему с зазорами 6 между основаниями 7 и 8 (фиг.2, 3), образующими неподвижный элемент 7-8 замыкающей плоской аэростатической опоры, образуют замыкающую плоскую аэростатическую опору 5, 7, 8. Замыкающая плоская аэростатическая опора 5, 7, 8 служит для силового замыкания подвижного элемента 1 плоской аэростатической опоры в плоскости, перпендикулярной плоскости стабилизации положения подвижного элемента 1. Под крышками 9 (фиг.3) выполнены жиклеры 10 подачи газа в зазоры 2 и 6 плоской аэростатической опоры и замыкающей плоской аэростатической опоры, соответственно. Подача газа осуществляется через штуцера подачи газа 11 (фиг.2). Устройство включает также блок 12 (фиг.7) стабилизации положения подвижного элемента 1, в состав которого, например, входят блок 13 датчиков величин зазоров, блок 14 датчиков величин зазоров, блок 15 датчиков величин зазоров и блок 16 датчиков величин зазоров (фиг.2, 4), установленные в основании 4 плоской аэростатической опоры. В каждом из блоков 13, 14, 15, 16 датчиков установлены первый датчик 17 величины зазора (от основания датчика 17 до поверхности подвижного элемента 1) и второй датчик 18 величины зазора, 19 - изоляторы датчиков 17 и 18 величин зазоров (фиг.5). Причем блоки 13, 14, 15, 16 датчиков установлены так, что основания датчиков 17, 18 величин зазоров всех блоков датчиков 13, 14, 15, 16 величин зазоров лежат в одной плоскости или в параллельных плоскостях. Кроме того, расстояния между центрами оснований датчиков 18, 18 в блоках 13, 14, 15, 16 датчиков равны и равны дискрете стабилизации На основании 4 плоской аэростатической опоры симметрично относительно блоков 13, 14, 15, 16 датчиков установлены регуляторы 19, 20, 21, 22 положения подвижного элемента 1 плоской аэростатической опоры (фиг.2, 6). На основании 3 опоры(фиг.6, 7) напротив регуляторов 19, 20, 21, 22 установлены регуляторы 23, 24, 25, 26 положения подвижного элемента 1. Каждый из упомянутых регуляторов 19, 20, 21, 22, 23, 24, 25, 26 положения подвижного элемента 1 (а.с. СССР №1500805, "Аэростатическая шпиндельная опора") включает (фиг.6) корпус 27, в торец которого ввинчена шайба 28. В основании шайбы 28 укреплен пьезостолб 29. Причем пьезостолб 29 изолирован от шайбы 28 изолятором 30. На противоположном торце пьезостолба 29 укреплена игла 31, которая предназначена для изменения площади поперечного сечения подводящего канала 32, а, следовательно, и давления газа на выходе подводящего канала 32. Начальную величину площади поперечного сечения подводящего канала 32 устанавливают путем смещения пьезостолба 29 вращением шайбы 28. В качестве датчика 33 величины линейного перемещения подвижного элемента 1 используют линейный индуктосин (фиг.7), измерительная головка 34 которого установлена на подвижном элементе 1, а неподвижная измерительная линейка 35 установлена на основании 4 плоской аэростатической опоры. Тогда в качестве измерителя 36 величины линейного перемещения подвижного элемента 1 может использоваться устройство цифровой индикации УЦИ Ф5291. Сигналы датчиков 17, 18 величин зазоров блоков 13, 14, 15, 16 датчиков измерителями 37 величин зазоров (Гриневич Б.Ф. и др. Измерительные компенсационно-мостовые устройства с емкостными датчиками. - К.: Наук. думка, 1987) блока 12 стабилизации положения подвижного элемента 1 плоской аэростатической опоры преобразуются в напряжения, пропорциональные величинам зазоров под этими датчиками 17, 18 и поступают в цифровой блок 38. Цифровой блок 38 обеспечивает: - прием, преобразование в цифровой код и отображение на экране дисплея информации измерителей 37, - формирование сигналов управления и выдачу и х на регуляторы 19, 20, 21, 22, 23, 24, 25, 26 положения подвижного элемента 1 в процессе установки величин опорных зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков, - формирование массива величин опорных зазоров и выдачу их в схему управления положением подвижного элемента 1 в процессе стабилизации. В заявляемом устройстве в качестве цифрового блока 38 могут использоваться ПЭВМ с модулями ввода-вывода данных для связи с внешними функциональными элементами. Примером такой ПЭВМ может служить ПЭВМ типа 9825 фирмы "Хьюлетт-Паккард" с модулем параллельного ввода-вывода данных Z80-P10 (см. Науман и др. Стандартные интерфейсы для измерительной техники. - М.: Мир, 1982). Функциональная схема модуля Z80-P10 для ввода информации с аналогового функционального элемента приведена на фиг.8, Функциональная схема для вывода информации на аналоговый функциональный элемент приведена на фиг.9. Восемь операционных усилителей 39 объединены по входам в пары и служат для формирования на выходах каждой пары операционных усилителей 39, одинаковых по величине и противоположных по знаку напряжений, пропорциональных кодам сигналов управления на регуляторы 19, 20, 21, 22, 23, 24, 25, 26 положения подвижного элемента 1, поступающих из цифрового блока 38 в процессе настройки устройства. Переключатели 40 "прямое - выкл. - обратное" служат для изменения полярности сигналов на входа х дифференциальных усилителей 41, поступающих с операционных усилителей 39. В положении переключателей 40 "прямое - выкл. обратное" "прямое" полярность сигналов на входа х дифференциальных усилителей 41 такая, что пьезостолбы 29 регуляторов 23, 24, 25, 26 удлиняются, а площади поперечных сечений подводящих каналов 32 этих регуляторов 23, 24, 25, 26 положения подвижного элемента 1 уменьшаются, а следовательно и давление на выходах подводящих каналов 32 уменьшается. Пьезостолбы 29 регуляторов 19, 20, 21, 22 укорачиваются, площади поперечных сечений подводящих каналов 32 этих регуляторов 19, 20, 21, 22 положения подвижного элемента 1 увеличиваются, а следовательно давление на выходах подводящих каналов 32 увеличивается. Под воздействием разности давлений регуляторов 19, 20, 21, 22, установленных на основании 4 опоры и регуляторов 23, 24, 25, 26 установленных на основании 3 опоры подвижный элемент 1 смещается в сторону основания плоской аэростатической опоры. В положении переключателей 40 "обратное" полярность сигналов на входах дифференциальных усилителей 41 изменяется на обратную. В результате подвижный элемент 1 смещается в сторону основания 4 опоры, В положении переключателей 40 "выкл." входы дифференциальных усилителей 41 отключаются от вы ходов операционных усилителей 39. Дифференциальные усилители 41 служат для получения на их выходах разнополярных сигналов, разность потенциалов которых и ее знак определяется разностью потенциалов входных сигналов и ее знаком. Причем, пьезостолбы 29 регуляторов 19, 20, 21, 22 положения, установленных на основании 4 опоры и пьезостолбы 29 регуляторов 23, 24, 25, 26 положения, установленных на основании 3 опоры, соответствующими дифференциальными усилителями 41 запитываются противофазным напряжением (фиг.7). Переключатель 42 "включено - выключено" в положении "включено" обеспечивает подключение выходов цифрового блока 38 и измерителей 37 величин зазоров под первыми датчиками 17 блоков 13, 14, 15, 16 датчиков ко входам дифференциальных усилителей 41. Причем, первые датчики 17 и вторые датчики 18 величин зазоров блоков 13, 14, 15, 16 датчиков величин зазоров соединены с входами измерителей 37 величин зазоров, выходы измерителей 37 величин зазоров соединены с входами цифрового блока 38, выходы измерителей 37 величин зазоров по сигналам вторых датчиков 18 величин зазоров через переключатель 42 "включено - выключено" соединены с первыми входами дифференциальных усилителей 41, датчик 33 величины линейного перемещения подвижного элемента 1 соединен с входом измерителя 36 величины линейного перемещения подвижного элемента 1, выходы измерителя 26 величины линейного перемещения подвижного элемента 1 соединены с входами цифрового блока 38, входы операционных усилителей 39 соединены с выходами цифрового блока 38, а выходы операционных усилителей 39 через переключатель 40 "прямое - выключено обратное" соединены с входами дифференциальных усилителей 41, вторые входы дифференциальных усилителей 41 через переключатель 42 "включено - выключено" соединены с входами цифрового блока 38, выходы дифференциальных усилителей 41 соединены с пьезостолбами 29 регуляторов 19, 20, 21, 22, 23, 24, 25, 26 положения подвижного элемента 1 плоской аэростатической опоры. Для повышения несущей способности подвижного элемента 1 (без смещения относительно базовой плоскости) вместо пары регуляторов давления устанавливают пару групп регуляторов давления, причем, в каждой группе регуляторы давления подключены параллельно. Кроме того, если требования к точности стабилизации подвижного элемента 1 невысоки, устройство может содержать только три блока датчиков величин зазоров и три пары регуляторов давления. Устройство стабилизации подвижного элемента 1 плоской аэростатической опоры работает следующим образом. 1. Основания первых и вторых да тчиков 17 и 18 блоков 13, 14, 15, 16 датчиков величин зазоров устанавливают в одной плоскости, например, с помощью эталонной плоскости. Для этого основание 4 плоской аэростатической опоры накладывают на эталонную плоскость. С пульта цифрового блока 38 выполняют пуск подпрограммы "Индикация зазоров". В соответствии с алгоритмом работы этой подпрограммы цифровой блок 38 с заданной частотой последовательно опрашивает измерители 37 величин зазоров (фиг.8), преобразует выходные сигналы измерителей 37 в цифровые двоичные коды, запоминает цифровые двоичные коды величин зазоров под первыми и вторыми датчиками 17, 18 блоков 13, 14, 15, 16 датчиков величин зазоров в памяти, преобразует их в десятичные коды и отображает на экране дисплея. Наблюдают на экране дисплея численные значения величин зазоров под первыми и вторыми датчиками 17 и 18 блоков 13, 14, 15, 16 датчиков и, если зазоры под ними не равны, смещают первые и вторые датчики 17, 18 по высоте зазора и, наблюдая эти величины зазоров на экране дисплея, устанавливают под всеми датчиками 17 и 18 блоков 13, 14, 15, 16 одинаковые величины зазоров относительно эталонной плоскости. Следовательно основания всех датчиков 17 и 18 будут установлены в одной плоскости. 2. Задают подвижному элементу 1 плоской аэростатической опоры начальное положение и принимают его в качестве невозмущенного положения подвижного элемента 1 относительно базовой плоскости. Для этого подвижный элемент плоской аэростатической опоры смещают в исходное, например, крайнее левое положение и устанавливают под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков равные зазоры. Для выполнения этих действий включают устройство, переключатель 42 "включено выключено" устанавливают в положение "выключено" и отключают измерители 37 величин зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков и выходы цифрового блока 38 от первых и вторых входов дифференциальных усилителей 41 соответственно. С пульта цифрового блока 38 выполняют пуск подпрограммы "Индикация зазоров". Алгоритм работы этой подпрограммы приведен в п.1. В результате на экране дисплея наблюдают численные значения величин зазоров под датчиками 17, 18 блоков 13, 14, 15, 16 датчиков. Сравнивают величины зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков. Если зазоры под вторыми датчиками 18 равны, с пульта цифрового блока 38 выполняют пуск подпрограммы "Запись опорных зазоров". В соответствии с алгоритмом работы этой подпрограммы код величины зазора под вторым датчиком 18 блока 13 датчиков перемещается в памяти цифрового блока 38 в первую ячейку массива опорных зазоров, код величины зазора под вторым датчиком 18 блока 14 датчиков перемещается в памяти цифрового блока 38 во вторую ячейку массива опорных зазоров, код величины зазора под вторым датчиком 18 блока 15 датчиков и код величины зазора под вторым датчиком 18 блока 16 датчиков перемещаются в памяти цифрового блока 38 в третью и четвертую ячейки массива опорных зазоров соответственно. Если зазоры под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков не равны, на пульте цифрового блока 38 набирают коды сигналов управления на регуляторы 19 и 23 положения, на регуляторы 20 и 24 положения, на регуляторы 21 и 25 положения, на регуляторы 22 и 26 положения подвижного элемента 1 соответственно и адреса 0001, 0010, 0100 операционных усилителей 39, электрически связанными с приведенными выше парами регуляторов положения. Так адрес 0001 соответствует операционным усилителям 39 электрически связанных с регуляторами 19 и 23 положения, адрес 0010 операционным усилителям 39 электрически связанных с регуляторами 20 и 24 положения, адрес 0011 операционным усилителям 39 электрически связанных с регуляторами 21 и 25 положения, адрес 0100 - операционным усилителям 39 электрически связанных с регуляторами 22 и 26 положения подвижного элемента 1. С пульта цифрового блока 38 выполняют пуск подпрограммы "Установка зазоров". В соответствии с алгоритмом работы этой подпрограммы коды сигналов управления преобразуются в напряжения сигналов управления и поступают на операционные усилители 39 в соответствии с установленными адресами, а с их инвертированных и неинвертированных выходов через переключатель 40 "прямое - выключено обратное" в положении "прямое" или "обратное" поступают на входы дифференциальных усилителей 41. С выходов каждого дифференциального усилителя 41 напряжение поступает на пьезостолбы 29 пар регуляторов 19 и 23, 20 и 24, 21 и 25, 22 и 26 положения соответственно. Причем напряжение на пьезостолбы 29 каждой пары регуляторов положения поступает в противофазе. В положении переключателя 40 "прямое", регуляторы положения смещают подвижный элемент 1 в сторону основания 3 опоры. В положении 40 "обратное", регуляторы положения смещают подвижный элемент 1 в сторону основания 4 плоской аэростатической опоры. С пульта цифрового блока 38 выполняют пуск подпрограммы "Индикация зазоров" и по экрану дисплея проверяют равенство зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков. Если эти зазоры не равны, методом последовательных приближений, изменяя сигналы управления на регуляторы 19, 20, 21, 22, 23, 24, 25, 26 положения, добиваются равенства зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков и выполняют пуск подпрограммы "Запись опорных зазоров". В результате выполнения этой подпрограммы будут заполнены первые четыре ячейки массива опорных зазоров в памяти цифрового блока 38. 3. Подвижный элемент 1 плоской аэростатической опоры из исходного положения смещают на дискрету стабилизации На величину дискреты стабилизации подвижный элемент 1 перемещают по цифровому индикатору измерителя 36 величины линейного перемещения УЦИ Ф5291. 4. На расстояние подвижного элемента 1 опоры относительно его исходного положения под первыми датчиками 17 блоков 13, 14, 15, 16 датчиков величин зазоров устанавливают величины зазоров равные величинам опорных зазоров соответственно и устанавливают подвижный элемент 1 плоской аэростатической опоры в невозмущенное положение относительно базовой плоскости. Не изменяя положения подвижного элемента 1 измеряют величины зазоров под вторыми датчиками 18 и запоминают их в качестве опорных зазоров установки подвижного элемента 1 невозмущенное положение на расстояние для в 21 относительно исходного положения. Для выполнения этих действий выполняют п.2, но вместо установки равных зазоров под вторыми датчиками 18 блоков 13, 14, 15,16 датчиков устанавливают блоков 13, зазоры 14, под первыми датчиками 17 15, 16 датчиков, равные соответствующим величинам опорных зазоров. 5. П.4 выполняют после каждого перемещения подвижного элемента 1 на расстояние максимальная величина перемещения подвижного элемента 1) и получают массив опорных зазоров 6. Работа устройства в процессе стабилизации подвижного элемента 1 плоской аэростатической опоры. Перед началом работы подвижный элемент 1 опоры устанавливают в исходное положение. Переключатели 40 "прямое - выключено обратное" устанавливают в положение "выключено" и отключают выходы операционных усилителей 39 от входов дифференциальных усилителей 41 (фиг.7). Переключатель 42 "включено - выключено" устанавливают в положение "Включено" и подключают измерители 37 величин зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков к первым входам дифференциальных усилителей 41, а ко вторым входам дифференциальных усилителей 41 подключают выходы напряжений опорных зазоров цифрового блока 38. С пульта в цифровой блок 38 вводят заданную величину перемещения подвижного элемента 1 из исходного положения и выполняют пуск подпрограммы "Стабилизации". В соответствии с алгоритмом работы этой подпрограммы код величины опорного зазора считывается из массива опорных зазоров цифрового блока 38, преобразуется в напряжение опорного зазора и поступает на второй вход дифференциального усилителя 41 регуляторов 19 и 23 положения (фиг.7), код величины опорного зазора преобразуется в напряжение и поступает на второй вход дифференциального усилителя 41 регуляторов 20 и 24 положения, код величины опорного зазора - преобразуется в напряжение и поступает на второй вход дифференциального усилителя 41 регуляторов 21 и 25 положения, код величины опорного зазора - преобразуется в напряжение и поступает на второй вход дифференциального усилителя 41 регуляторов 22 и 26 положения подвижного элемента 1. На первый вход дифференциального усилителя 41 регуляторов 19, 23 положения поступает сигнал с выхода измерителя 37 величины зазора по сигналу второго датчика 18 блока 13 датчиков, рядом с которым установлены регуляторы 29, 23 положения. На первый вход дифференциального усилителя 41 регуляторов 20, 24 положения поступает сигнал с выхода измерителя 37 величины зазора по сигналу второго датчика 18 блока 14 датчиков, рядом с которым установлены регуляторы 20, 24 положения. На первый вход дифференциального усилителя 41 регуляторов 21, 25 положения поступает сигнал с выхода измерителя 37 величины зазора по сигналу второго датчика 18 блока 15 датчиков, рядом с которым установлены регуляторы 21, 25 положения. На первый вход дифференциального усилителя 41 регуляторов 22, 26 положения поступает сигнал с выхода измерителя 37 величины зазора по сигналу второго датчика 18 блока 16 датчиков, рядом с которым установлены регуляторы 22, 26 положения. Если зазоры под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков не равны, соответствующим величинам опорных зазоров, на выходах дифференциальных усилителей 41 возникают разности потенциалов, пропорциональные величинам отклонений зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков от соответствующи х величин опорных зазоров, которые поступают на пьезостолбы 29 пар 19 и 23, 20 и 24, 21 и 25, 22 и 26 регуляторов положения. Причем, пьезостолбы 29 в каждой паре регуляторов положения подключены к дифференциальным усилителям в противофазе. В результате в каждой упомянутой паре регуляторов положения один пьезостолб удлиняется, а другой укорачивается, Под воздействием разности давлений на выходах пар 19 и 23, 20 и 24, 21 и 25, 22 и 26 установленных напротив друг против друга регуляторов положения положение подвижного элемента 1 плоской аэростатической опоры изменится так, что разность между величинами зазоров под вторыми датчиками 18 блоков 13, 14, 15, 16 датчиков и соответствующими опорными зазорами будет стремиться к нулю. Подвижный элемент 1 займет относительно базовой плоскости несмещенное положение. Перемещают подвижный элемент 1 опоры на заданное расстояние Сигнал датчика 33 величины линейного перемещения подвижного элемента 1 опоры преобразуется измерителем 36 УЦИ Ф5291 в цифровой двоичный код величины линейного перемещения подвижного элемента 1. Причем двоичный код величины текущего перемещения подвижного элемента 1 в измерителе 36 2ЦИ Ф5291 формируется с частотой 10кГц и одновременно с сигналом наличия информации поступает в цифровой блок 38. В соответствии с алгоритмом работы подпрограммы "Стабилизация" по сигналу ИМИ код величины текущего перемещения подвижного элемента 1 сравнивается с расстоянием до очередной дискреты коррекции Если это равенство выполняется в данном случае) из пятой, шестой, седьмой, восьмой ячеек массива опорных зазоров считывают коды величин опорных зазоров преобразуются в напряжения и поступают на вторые входы дифференциальных усилителей 41. Подвижный элемент 1 займет на начале второй дискреты стабилизации невозмущенное положение относительно базовой плоскости. Процесс стабилизации продолжается до выполнении неравенства Погрешность стабилизации положения подвижного элемента 1 не превышает максимальной разности двух смежных опорных зазоров по всему множеству опорных зазоров, определяется неплоскостностью поверхности подвижного элемента 1, обращенной к блокам 13, 14, 15, 16 датчиков величин зазоров, и может превышать 0,1мкм.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for stabilization of position of movable element of flat aerostatic support
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюУстройство стабилизации положения подвижного элемента плоской аэростатической опоры
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: аеростатичної, пристрій, плоскої, стабілізації, опори, положення, рухомого, елемента
Код посилання
<a href="https://ua.patents.su/9-17152-pristrijj-stabilizaci-polozhennya-rukhomogo-elementa-plosko-aerostatichno-opori.html" target="_blank" rel="follow" title="База патентів України">Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори</a>
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: стабілізації, здійснення, елемента, аеростатичної, рухомого, спосіб, напрямної, положення, пристрій
Формула / Реферат:
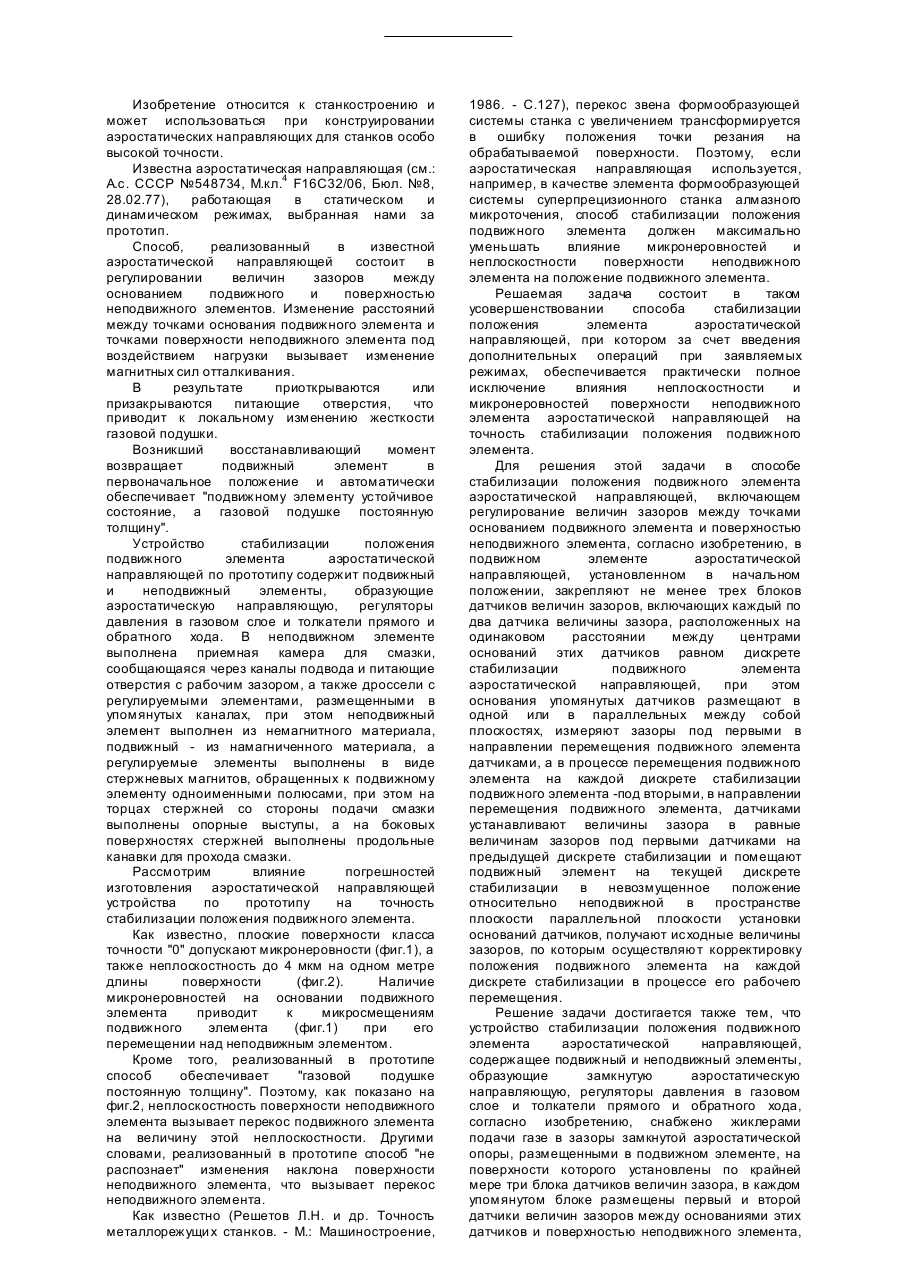
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Вузол кріплення трубчастого елемента до плоскої фасонки
Номер патенту: 2737
Опубліковано: 26.12.1994
Автор: Барик Ярослав Сільвестрович
МПК: E04B 1/58
Мітки: елемента, кріплення, вузол, фасонки, плоскої, трубчастого
Формула / Реферат:
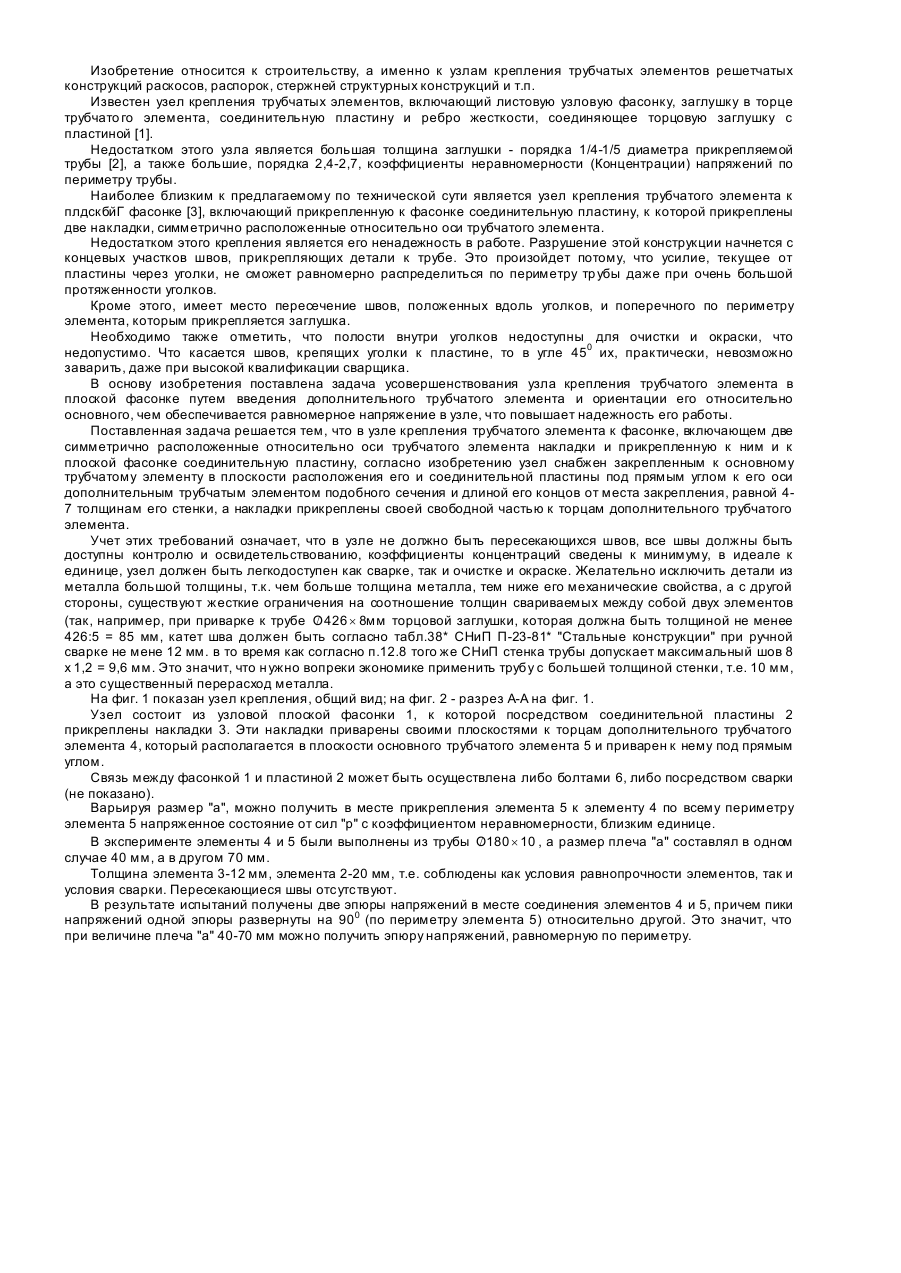
Узел крепления трубчатого элемента к плоской фасонке, включающий две симметрично расположенные относительно оси трубчатого элемента накладки и прикрепленную к ним и к плоской фасонке соединительную пластинку, отличающийся тем, что он снабжен закрепленным к основному трубчатому элементу в плоскости его расположения и под прямым углом к его оси дополнительным трубчатым элементом подобного сечения и длиной его концов от места закрепления, равной...
Магнітна опора для стабілізації положення вала
Номер патенту: 2264
Опубліковано: 26.12.1994
Автори: Альбрехт Веллер, Йохан Крістіан Фремерей
МПК: F16C 32/04
Мітки: вала, стабілізації, опора, положення, магнітна
Формула / Реферат:
1. Магнитная опора для стабилизации положения вала, содержащая вал и корпус, в котором расположены электрические катушки, а также соединенную с ними систему датчиков положения вала, регулятор и постоянные магниты, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик и упрощения конструкции, она снабжена по меньшей мере двумя смонтированными на валу вдоль его оси с зазором по отношению друг к другу упорными дисками, по...
Пристрій для лінійних переміщень
Номер патенту: 14904
Опубліковано: 04.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: пристрій, лінійних, переміщень
Формула / Реферат:
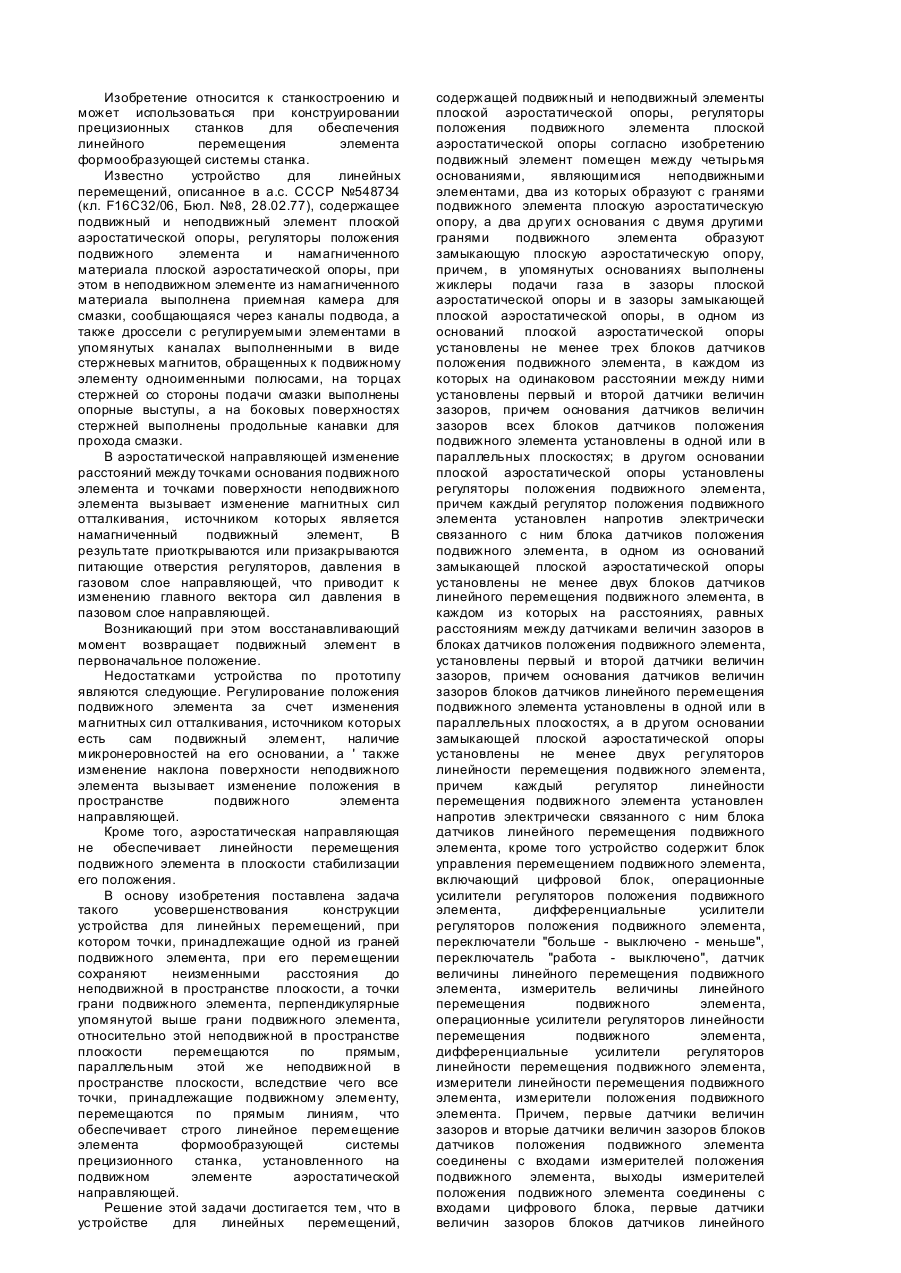
Устройство для линейных перемещений, содержащее подвижный и неподвижный элементы плоской аэростатической опоры, регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что подвижный элемент помещен между четырьмя основаниями, являющимися неподвижными элементами, два из которых образуют с гранями подвижного элемента плоскую аэростатическую...
Пристрій для формування команд керування по шляху переміщення рухомого об’єкта
Номер патенту: 1715
Опубліковано: 25.10.1994
Автор: Клименко Віталій Васильович
МПК: B66B 1/34
Мітки: переміщення, формування, рухомого, керування, шляху, команд, об'єкта, пристрій
Формула / Реферат:
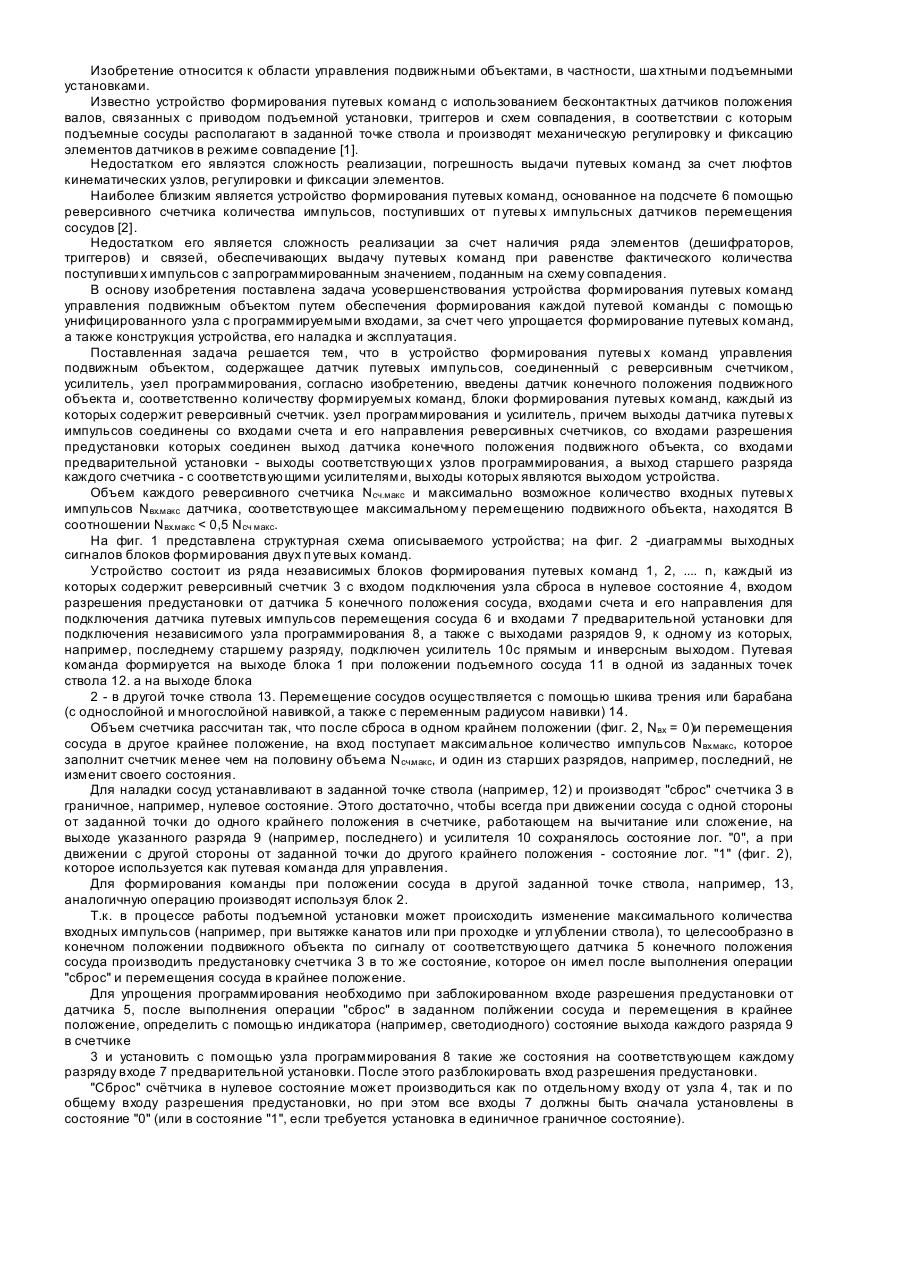
1. Устройство формирования путевых команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, отличающееся тем, что в него введены датчик конечного положения подвижного объекта и, соответственно количеству формируемых команд, блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель причем выходы...
Попередній патент: Безтрансформаторний обмежувач напруги змінного струму
Наступний патент: Спосіб лікування гнійних ран і порожнин
Випадковий патент: Спосіб заміщення післярезекційних дефектів тканини для порожнини рота, язика, ротоглотки та нижньої щелепи