Спосіб випробування двигунів постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 28976
Опубліковано: 16.10.2000
Автори: Веласко Ангуло Херардо, Родькін Дмитро Йосипович, Нечаєва Світлана Володимирівна

Формула / Реферат
Способ испытания двигателей постоянного тока независимого возбуждения включает подключение якоря двигателя к источнику переменного напряжения, изменение амплитуды этого напряжения, измерение эффективного и среднего значений тока якоря, а также среднего значения скорости за период воздействия, получение данных из результатов нагружения о качестве электрической машины, отличающийся тем, что нагружение двигателя осуществляют путем подключения якоря к параллельно включенным регулируемому преобразователю и электрической цепи, состоящей из преобразователя частоты с последовательным LC- контуром на выходе, разгоняют двигатель до расчетного значения скорости, изменяют частоту на выходе преобразователя частоты, добиваются резонанса в цепи, включающей преобразователь частоты, LC- контур, индуктивность и динамическую емкость двигателя, поддерживают постоянным по величине ток регулируемого преобразователя путем регулирования его напряжения в функции тока преобразователя частоты, контролируют состояние щеточного аппарата двигателя, поддерживают эффективный ток якоря на уровне заданного, определяют динамические константы испытуемого электродвигателя.
2. Устройство, реализующее способ испытания, включщее регулируемый преобразователь, двигатель, регулятор тока и напряжения регулируемого преобразователя, датчики тока и напряжения регулируемого преобразователя, подключенные к выводам регулируемого преобразователя, датчик скорости двигателя, измерительный блок, отличающееся тем, что из последовательно включенных индуктивности и емкости подключена резонансная цепочка к выходу преобразователя частоты, датчик фазы тока преобразователя частоты, блок коррекции, датчики напряжения и тока преобразователя частоты, причем выход датчика тока регулируемого преобразователя соединен со вторым вводом регулятора тока, первым входом измерительного блока, вторым входом блока коррекции, выход датчика напряжения регулируемого преобразователя соединен со вторым входом регулятора напряжения и вторым входом измерительного блока, выход датчика тока преобразователя частоты соединен с четвертым входом измерительного блока, первым входом датчика фазы, первым входом блока коррекции, выход датчика напряжения преобразователя частоты соединен со вторым входом датчика фазового сдвига, выход датчика тока преобразователя частоты через масштабный блок с регулируемым коэффициентом передачи связан с третьим входом регулятора напряжения, один из выходов преобразователя частоты через последовательно включенные индуктивность и емкость связан с одним из якорных зажимов двигателя, второй выход преобразователя частоты через датчик тока связан со вторым зажимом двигателя, выход датчика скорости связан с третьим входом измерительного блока.
Текст
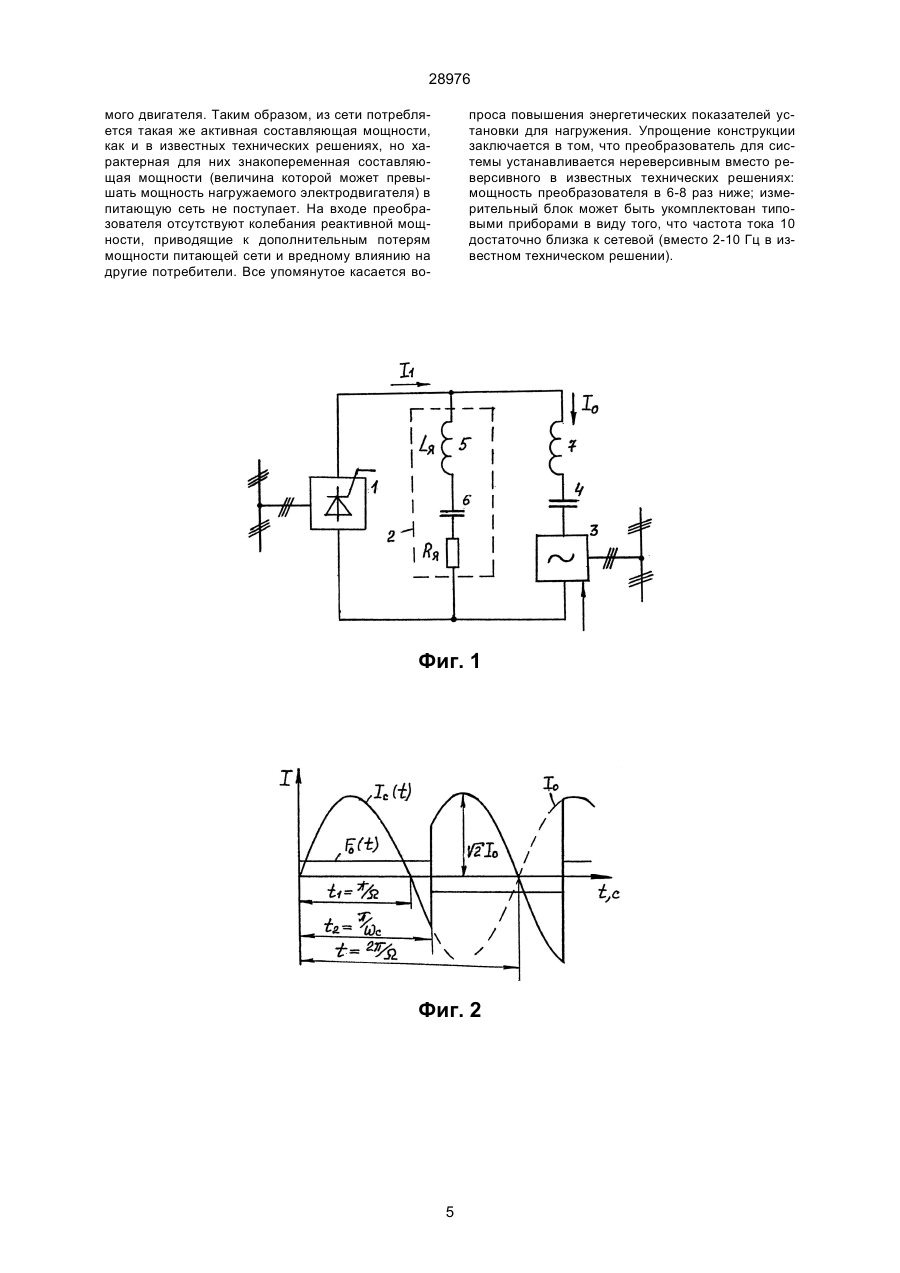
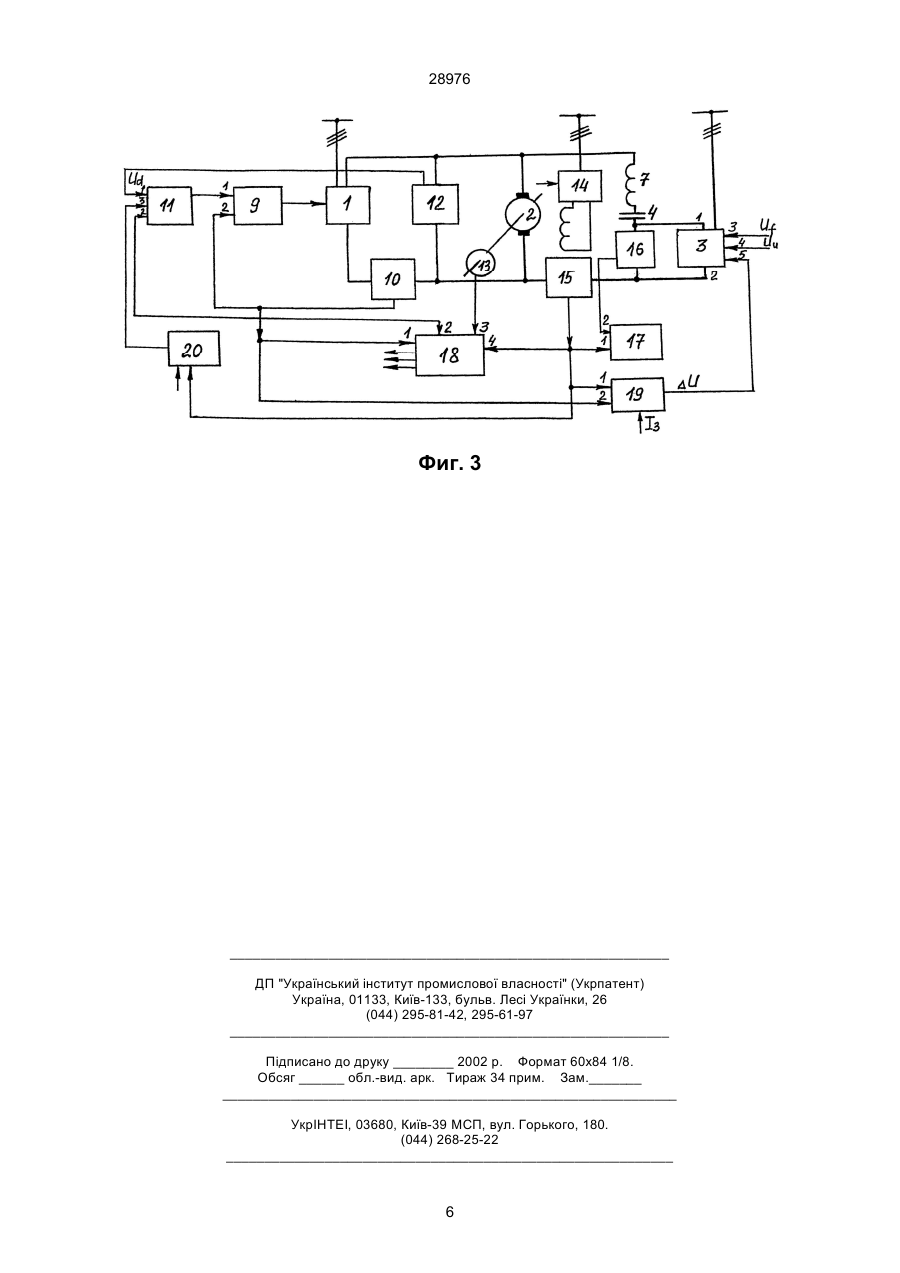
1. Способ испытания двигателей постоянного тока независимого возбуждения включает подключение якоря двигателя к источнику переменного напряжения, изменение амплитуды этого напряжения, измерение эффективного и среднего значений тока якоря, а также среднего значения скорости за период воздействия, получение данных из результатов нагружения о качестве электрической машины, отличающийся тем, что нагружение двигателя осуществляют путем подключения якоря к параллельно включенным регулируеому преобразователю и электрической цепи, состоящей из преобразователя частоты с последовательным LC- контуром на выходе, разгоняют двигатель до расчетного значения скорости, изменяют частоту на выходе преобразователя частоты, добиваются резонанса в цепи, включающей преобразователь частоты, LC- контур, индуктивность и динамическую емкость двигателя, поддерживают постоянным по величине ток регулируемого преобразователя путем регулирования его напряжения в функции тока преобразователя частоты, контролируют состояние щеточного аппарата двигателя, поддерживают эффективный ток якоря на уровне заданного, определяют динамические константы испытуемого электродвигателя. 2. Устройство, реализующее способ испытания, включающее регулируемый преобразователь, A (54) СПОСІБ ВИПРОБУВАННЯ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ НЕЗАЛЕЖНОГО ЗБУДЖЕННЯ ТА ПРИСТРІЙ ДЛЯ ЙОГО ЗДІЙСНЕННЯ 28976 ществляют путем подключения якоря двигателя к параллельно включенный регулируемому преобразователю и электрической цепи, состоящей из преобразователя частоты с последовательным LC- фильтром на выходе, разгоняют двигатель до расчетного значения скорости, изменяют частоту на выходе преобразователя частоты, добиваются резонанса в цепи, включающей преобразователь частоты, LC- контур, индуктивность и динамическую емкость двигателя, поддерживают постоянным по величине ток регулируемого преобразователя, контролируют состояние щеточного аппарата, определяют динамические константы испытуемого электродвигателя. Перечень фигур: фиг. 1 - эквивалентная схема силовой цепи; фиг. 3 - блок-схема устройства, реализующего способ; фиг. 2 - линейные диаграммы, иллюстрирующие процесс нагружения. Сущность способа видна из фиг. 1. Регулируемый преобразователь 1 с помощью системы управления позволяет разгонять двигатель 2 до скорости: U w3 @ 1 , КФ где: U1 - выпрямленное напряжение преобразователя; KФ - коэффициент потока двигателя. Ток якоря при этом соответствует равенству: M I1 = xx , КФ где: Мхх - момент холостого хода двигателя. Если напряжение на выходе преобразователя частоты 3 равно нулю, то емкость 4 заряжается практически до напряжения преобразователя 1, а ток І0 при этом будет равен нулю. Если выходное напряжение блока 3 равно U3, а частота этого напряжения W, то в цепи, шунтирующей якорь двигателя, будет ток: U3 I0 = , (XL7 + XL5 - XC4 - XC6 )2 + R2 Я dIя от которого зависит стойdt кость отремонтированной машины. Испытания осуществляются по методу взаимной нагрузки. Устройство включает возбудительные блоки двигателя и генератора, систему подчиненного регулирования параметров генератора в системе испытания. Недостатками известного способа являются: необходимость механического агрегирования электрических машин; невозможность достиdIя жения высоких показателей из-за инерционdt ности обмотки возбуждения; низкие энергетические показатели из-за изменения во времени реактивной мощности приводного электродвигателя генератора; значительные потери энергии в приводном двигателе, генераторе; сложность определения параметра в виду зависимости его от качества настройки регуляторов системы регулиæ dIя ö рования ç ÷. è dt ø Известен способ нагружения двигателей постоянного тока, который заключается в том, что якорь двигателя подключают к преобразователю частоты, регулируют амплитуду выходного напряжения, измеряют действующие значения тока якоря и напряжения на нем за период низкочастотного напряжения, а также углы поворота якоря двигателя в прямом и реверсированном направлениях вращения якоря (Пат. ГДР G0131/34 Способ испытания под нагрузкой двигателя постоянного тока). Недостатками способа и устройств, реализующих его, являются: нагружение осуществляется при средней скорости, близкой к нулю, что не соответствует реальным режимам эксплуатации; низкие энергетические показатели вследствие того, что при нагружении между преобразователем частоты и сетью циркулирует знакопеременная мощность, превышающая мощность нагружаемого двигателя. По этой причине установленная мощность преобразователя частоты должна быть равна мощности нагружаемого двигателя. Указанные причины не только снижают энергетические показатели нагрузочных установок, но и приводят к негативному влиянию их на другие потребители, подключенные к общей промышленной сети. Рассматриваемый способ имеет общие признаки с предлагаемым техническим решением: в то же время, наличие существенных отличительных признаков позволяет классифицировать его как прототип. Задачей предполагаемого способа и устройства его реализующего, является повышение энергетических показателей и упрощение конструкции. Поставленная задача решается за счет того, что способ нагружения двигателя постоянного тока независимого возбуждения, заключающийся в подключении якоря к источнику переменного напряжения, изменении амплитуды этого напряжения, измерении эффективного и среднего значений тока якоря, среднего значения скорости, и обработке полученных результатов с последующими выводами о качестве электрической машины, осу деления параметра где: XC6 = XL 7 = L 7 × W; 1 = WC6 XL5 = L 5 × W; (КФ )2 ; XC 4 = 1 ; WC 4 W×J Rя - сопротивление якоря (сопротивлением преобразователя частоты 3 пренебрегаем); J - момент инерции якоря двигателя. Если частоту на выходе блока 3 изменять, то ток I0 станет равным: U I0 = 3 Rя при: W= С4 + С6 . С4 × С6 × (L 7 + L 5 ) Параметр С6 легко определяется по данным прямого эксперимента: J C6 = ; КФ 2 Индуктивность якорной цепи: L я = L5 . Таким образом, по результатам нагружения определяются важнейшие динамические константы двигателя: 2 28976 L5 ; Tм = C6 × R я . Rя Процесс нагружения характерен следующим: от преобразователя 1 потребляется постоянное значение мощности, равное мощности потерь холостого хода: 2 DPxx = Mxx × w3 + I1R я ; - от преобразователя частоты 3 потребляется мощность, равная: DP3 = I2 × R я ; 0 - напряжение на выходе преобразователя частоты U3=I0×Rя, т.е. составляет несколько процентов от номинального напряжения двигателя (если I0@Iн); напряжение на выходе преобразователя 1 должно быть равно: U1 = w3 × КФ + I1 × R я + I0 (XL5 - XC6 )2 + R2 . я Причем очевидно, что это напряжение должно изменяться с частотой W, т.е. регулироваться в процессе напруження: это напряжение не должно превышать допустимого напряжения на зажимах нагружаемого электродвигателя (при правильно выбранных параметрах это позволяет нагружать двигатель при повышенном напряжении): напряжение на индуктивности 7 равно: U7 = I0 × XL7 ; - напряжение на емкости 4 включает постоянную составляющую, равную напряжению источника 1 и переменную, зависящую от I0: U4 = I0 × XC4 ; - при определении параметров емкости 4 следует ориентироваться следующими положениями; напряжение на емкости не должно менять знак, что создает возможность для применения дешевых электролитических конденсаторов; расчетные параметры следует определять, исходя из минимального номинального напряжения испытуемого двигателя и максимума его рабочего тока, равного: 2 2I2 + I1 ; I0 = 0 IH = 2 2 2 IH - I1 . При работе двигателя постоянного тока (при условии Iя=const) основная частота тока в секциях якорной обмотки: wc = p × w3 , где: р - число пар полюсов двигателя. С учетом того, что при нагружении через якорную обмотку проходит постоянная и переменная составляющая тока, то зависимость полного тока в обмотав якоря в функции времени имеет вид: I(t ) = I1 + I0 2 × sin Wt × F0 (t ) = n= ¥ 4 = I1 × å × sin wcnt + n =1 p n ( ) n= ¥ 4 sin wc nt , n =1 p n где: F0(t) - коммутирующая функция, соответствующая wс, имеющая амплитуду, равную 1,0 и меняющая свой знак при прохождении секции под щеткой. Этой функции соответствует зависимость: F0 (t ) = sign (wc t ), которая разлагается в ряд Фурье: + I0 2 sin Wt × n= ¥ 4 × sin wcnt . pn n =1 Таким образом, кривая тока в секции якорной обмотки будет иметь составляющие с частотами: nwс; W+nwс; W-nwс. При работе двигателя в нормальном режиме частота wc близка к частоте сети. Примерные кривые коммутирующей функции, тока преобразователя частоты I0, тока секции обмотки Ic приведены на фиг. 2. Анализ показывает, что при одном и том же действующем значении тока различный гармонический состав его влияет на уровень потерь в стали, катя это проявляется при частотах существенно выше частоты сети (=314 с). По этой причине очевидно, что нагружение при W£wс по тепловому фактору в предлагаемом способе практически не отличается от нагруженя постоянным током того же действующего значения. Процесс коммутации тока на коллекторе в предлагаемом способе не отличается от соответствующего процесса при постоянном якорном токе. Опасность искрения невелика в виду того, что поток двигателя постоянен, ток носит знакопеременный характер. Блок-схема устройства для реализации способа представлена на фиг. 3. Устройство включает двигатель 1, подключенный через датчик тока 10 к регулируемому преобразователю (в качестве которого используется тиристорный преобразователь с нереверсивным выходом). В состав преобразователя входит система импульсно-фазового управления и сглаживающий дроссель. Мощность преобразователя 1 составляет 10-15% от мощности двигателя. Система регулирования преобразователя включает регулятор тока 9 с датчиком тока 10, регулятор напряжения 11 с датчиком напряжения 12. Двигатель имеет датчик скорости 13, устанавливаемый непосредственно на вал двигателя или измерения осуществляются дистанционно. Возбуждение двигателя осуществляется от регулируемого источника питания – возбудителя 14. Параллельно якорю двигателя включается емкость 4, индуктивность 7, тиристорний преобразователь частоты с однофазным выходом 3 и датчик тока преобразователя частоты 15. К зажимам преобразователя 3 подключен также датчик напряжения 16. Преобразователь частоты - широтно-импульсный ПЧ с однофазным выходом, выполненный по любой из схем с искусственной коммутацией или на запираемых тиристорах. Выходное напряжение блока 3 - 10-15% выходного напряжения двигателя 2, выходной ток ПЧ - равен или больше номинального тока двигателя. Выходное напряжение ПЧ должно быть достаточно близко к синусоидальному; диапазон частот - 35-75 Гц. Все упомянутые выше датчики - типовые блоки, используемые в системах автоматического управления. Блоки должны иметь гальваническую развязку от силовых цепей. Все упомянутые блоки являются типовыми и в описании предполагаемого изобретения не рассматриваются. Датчик 17 - датчик фазового сдвига (фазометр), один вход которого соединяется с F0 (Ф ) = Tэ = å 3 å 28976 датчиком тока 15, а второй - с выходом датчика напряжения 16. В качестве блока 17 может использоваться или электромеханический или электронный фазометр. Блок 17 служит для контроля настройки резонансного контура при нагружении. Блок 18 - блок измерительных приборов. В комплект этого блока входят: амперметр для измерения среднего значения тока преобразователя; вольтметр для определения среднего значения напряжения на выходе преобразователя; амперметр для измерения действующего значения тока преобразователя частоты; цифровой прибор для определения действующего значения тока якоря двигателя. На вход этого прибора подается сумма сигналов блока 10 и блока 15. Возможны различные варианты этого блока, в том числе и на аналоговой элементной базе. В этом случае на вход операционного усилителя поступают сигналы от двух датчиков тока, после усилителя выходной сигнал поступает на фильтр с постоянной времени не менее периода выходного напряжения преобразователя частоты: после фильтра сигнал поступает на нелинейный блок типа "корень квадратный", а затем на стрелочный или иной прибор для индикации действующего значения тока якоря двигателя. Блок коррекции 19 включает сумматор для суммирования сигналов с блоков 10 и 15, к выходу сумматора подключается квадратор, выход которого через фильтр соединяется с нелинейным блоком "корень квадратный". Выход этого блока сравнивается с сигналом задания действующего значения тока якоря, а полученная разность в виде сигнала DU и сигнала коррекции поступает на управляющий по напряжению вход преобразователя частоты 3. Два других входа ПЧ (3 и 4) служат для ручного задания выходного напряжения и частоты. Блок 20 - масштабный блок с регулируемым коэффициентом усиления. Работа устройства заключается в следующем. Изменяя сигнал на выходе регулятора напряжения 11, разгоняют возбужденный двигатель до заданного значения скорости. Затем, путем плавного изменения частоты блока 3 и напряжения на его выходе добиваются прохождения по якорной цепи тока I0, равного 25-30% от номинального тока двигателя при сдвиге фаз j=0 между напряжением и током преобразователя. Это контролируется с помощью блока 17. При этом сигнал с выхода блока 20 должен быть минимальным или равным нулю. При увеличении тока до I0=0,25-0,3 Iн и отсутствии сигнала с выхода блока 20 скорость двигателя снижается ввиду того, что задание регулятора напряжения постоянно по величине, а сигнал с датчика напряжения кроме постоянной имеет и переменную составляющую. Для компенсации снижения скорости постепенно увеличивают напряжения на выходе блока 20 и добиваются восстановления первоначального значения скорости вращения якоря. Это означает, что через преобразователь протекает не меняющийся во времени ток, необходимый для преодоления двигателем момента холостого хода. В дальнейшем путем изменения сигнала задания напряжения Uf на выходе преобразователя частоты увеличивают составляющую тока якоря I0, контролируя при этом состояние щеточного аппарата. Если искрения на щетках нет, то задание Uf увеличивают до такого значения, при котором эффективное (действующее) значение якорного тока не станет равным номинальному или расчетному. Процесс нагружения контролируют с помощью приборов, входящих в состав измерительного блока. Если в процессе нагружения из-за нагревания обмотки якоря или других элементов ток I0 уменьшается, то вступает в работу обратная связь, сигнал которой формируется путем сравнения эффективного значения тока якоря с заданным значением. Сигнал коррекции поступает в виде напряжения на 5 вход блока 3. при ручном управлении корректирующая поправка вводится оператором путем изменения сигнала Uf на входе блока 3. При нагружении оператором контролируется угол сдвига фазы тока и напряжения с помощью блока 17. Если в процессе нагружения упомянутый угол изменится, то оператор соответствующим образом изменяет сигнал Uf на входе блока 3. В результате нагружения кроме температуры обмоток изменяется активное сопротивление якоря под нагрузкой, которое существенно отличается от сопротивления, измеренного при токе якоря Iя@0. Для получения необходимого результата оператор пользуется следующей зависимостью: U - I ×R Rя = 3 0 0 , I0 где: R0 - сопротивление индуктивности 7, внутреннее сопротивление преобразователя 3. Коэффициент потока двигателя определяется по средним значениям напряжения на зажимах двигателя и скорости его якоря: U КФ = 1 . w3 Эквивалентная динамическая емкость двигателя: J × w2 3 C6 = , 2 U1 где: J - момент инерции (известен или определяется методом самовыбега); Lя – индуктивность якоря двигателя: C6 + C 4 - L7 . Lя = C6 × C4 × W 2 Динамические константы двигателя: L Tэ = я ; Tм = C6 × R я . Rя В приведенных зависимостях индексы перед обозначениями емкостей и индуктивностей соответствуют индексации блоков и элементов на фиг. 3. Значение частоты W, входящее в выражение для индуктивности якоря, определяется по контрольно-измерительным приборам, входящим в состав преобразователя 3. Применение предполагаемого изобретения позволяет получить эффект, заключающийся в следующем. Преобразователями 1 и 3 потребляется из сети мощность (потерь преобразователем 1 потребляется мощность механических потерь, преобразователем 3 - мощность потерь в якоре). Эти составляющие равны 10-15% мощности нагружае 4 28976 мого двигателя. Таким образом, из сети потребляется такая же активная составляющая мощности, как и в известных технических решениях, но характерная для них знакопеременная составляющая мощности (величина которой может превышать мощность нагружаемого электродвигателя) в питающую сеть не поступает. На входе преобразователя отсутствуют колебания реактивной мощности, приводящие к дополнительным потерям мощности питающей сети и вредному влиянию на другие потребители. Все упомянутое касается во проса повышения энергетических показателей установки для нагружения. Упрощение конструкции заключается в том, что преобразователь для системы устанавливается нереверсивным вместо реверсивного в известных технических решениях: мощность преобразователя в 6-8 раз ниже; измерительный блок может быть укомплектован типовыми приборами в виду того, что частота тока 10 достаточно близка к сетевой (вместо 2-10 Гц в известном техническом решении). Фиг. 1 Фиг. 2 5 28976 Фиг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing direct current motors with independent excitation and appliance for its implementation
Автори англійськоюRodkin Dmytro Yosypovych, Nechaieva Svitlana Volodymyrivna, Velasko Anhulo Herardo
Назва патенту російськоюСпособ испытания двигателей постоянного тока независимого возбуждения и устройство для его осуществления
Автори російськоюРодькин Дмитрий Иосифович, Нечаева Светлана Владимировна, Веласко Ангуло Херардо
МПК / Мітки
МПК: G01R 31/34
Мітки: пристрій, незалежного, спосіб, струму, випробування, двигунів, постійного, збудження, здійснення
Код посилання
<a href="https://ua.patents.su/6-28976-sposib-viprobuvannya-dviguniv-postijjnogo-strumu-nezalezhnogo-zbudzhennya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб випробування двигунів постійного струму незалежного збудження та пристрій для його здійснення</a>
Прилад для захисту від короткого замикання тиристорного електропривода з двигуном постійного струму незалежного збудження
Номер патенту: 11858
Опубліковано: 25.12.1996
Автори: Хорунжий Юрій Валентинович, Дубинський Андрій Олександрович
МПК: H02H 7/08
Мітки: захисту, збудження, струму, постійного, електропривода, тиристорного, прилад, незалежного, короткого, двигуном, замикання
Формула / Реферат:
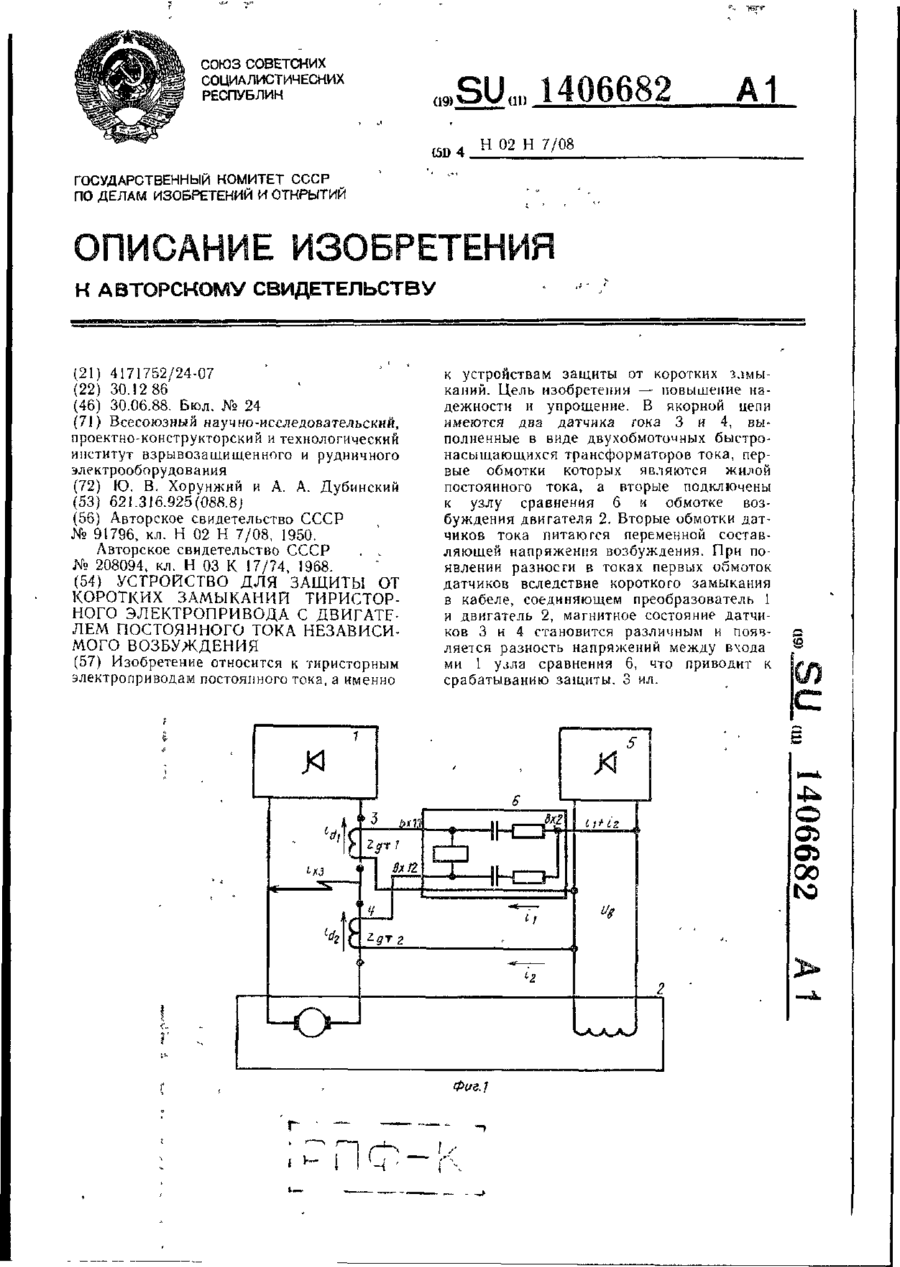
Устройство для защиты от коротких замыканий тиристорного электропривода с двигателем постоянного тока независимого возбуждения, содержащее два датчика тока, при этом первичная обмотка первого датчика тока содержит клеммы для включения в якорную цепь упомянутого двигателя, первые выводы вторичных обмоток датчиков тока подсоединены к соответствующим входам узла сравнения, отличающееся тем, что, с целью повышения надежности и упрощения,...
Спосіб рекуперативного генераторного гальмування тягового електродвигуна постійного струму незалежного збудження
Номер патенту: 24459
Опубліковано: 21.07.1998
Автори: Кравчун Степан Іванович, Кривицький Ігор Олександрович, Скиданов Володимир Михайлович, Юрченко Олег Миколайович, Овраченко Андрій Анатолійович, Павлов Віктор Борисович, Папашев Олег Хайруллович, Астапов Юрій Арсенйович
МПК: H02P 7/18
Мітки: спосіб, електродвигуна, тягового, генераторного, збудження, струму, незалежного, рекуперативного, гальмування, постійного
Формула / Реферат:
Способ рекуперативного генераторного торможения тягового электродвигателя постоянного тока независимого возбуждения, заключающийся в плавном увеличении магнитного потока обмотки независимого возбуждения при скорости вращения электродвигателя постоянного тока выше номинальной, работающего в генераторном режиме и питающегося от ступенчато переключающейся аккумуляторной батареи, отличающийся тем, что при достижении электродвигателем номинальной...
Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення
Номер патенту: 20167
Опубліковано: 25.12.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: H02K 15/00, G01R 31/34, G06G 7/00
Мітки: управління, постійного, пристрій, струму, здійснення, визначення, параметрів, двигуном, спосіб, системі
Формула / Реферат:
1. Способ определения параметров систем управления с двигателем постоянного тока, включающий измерение тока і и напряжения U якоря двигателя, скачкообразное изменение задающего воздействия от блока задающих сигналов, отличающийся тем, что используют активно-индуктивную (RL) нагрузку, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализуют на основе преобразования контура регулирования тока и с помощью...
Пристрій для захисту від перевищення допустимої частоти обертання електродвигуна постійного струму
Номер патенту: 2794
Опубліковано: 26.12.1994
Автори: Монаєв Віктор Іванович, Бардамід Василь Іванович
МПК: H02H 7/093
Мітки: постійного, струму, частоти, пристрій, перевищення, захисту, допустимої, обертання, електродвигуна
Формула / Реферат:
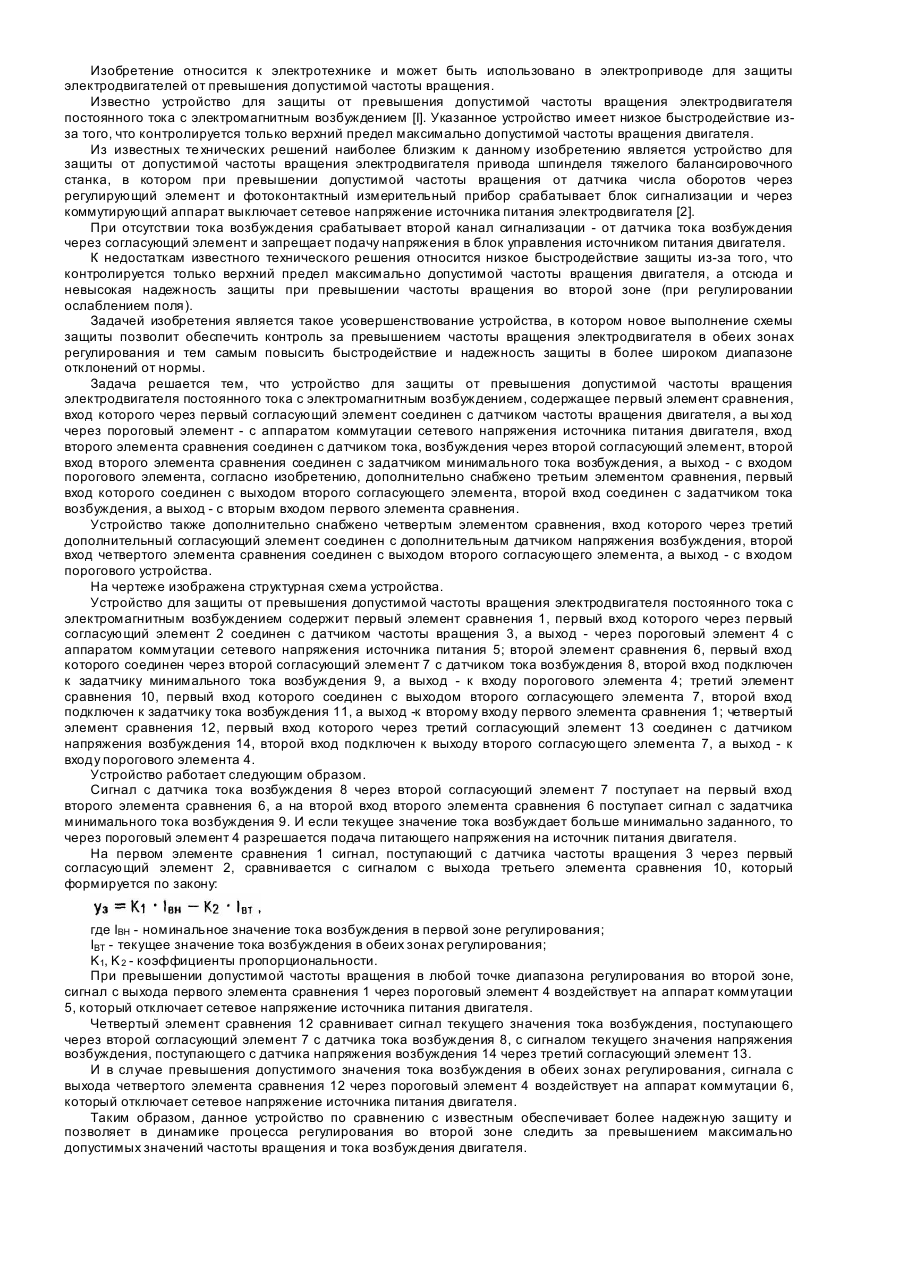
1. Устройство для защиты от превышения допустимой частоты вращения электро-двигателя постоянного тока с электромагнитным возбуждением, содержащее первый элемент сравнения, вход которого через первый согласующий элемент соединен с датчиком частоты вращения двигателя, а выход через пороговый элемент - с аппаратом коммутации сетевого напряжения источника питания двигателя, вход второго элемента сравнения соединен с датчиком тока возбуждения...
Електропривод постійного струму
Номер патенту: 15301
Опубліковано: 30.06.1997
Автори: Сохіна Юлія Віталіївна, Садовой Олександр Валентинович
МПК: H02P 7/06
Мітки: струму, постійного, електропривод
Формула / Реферат:
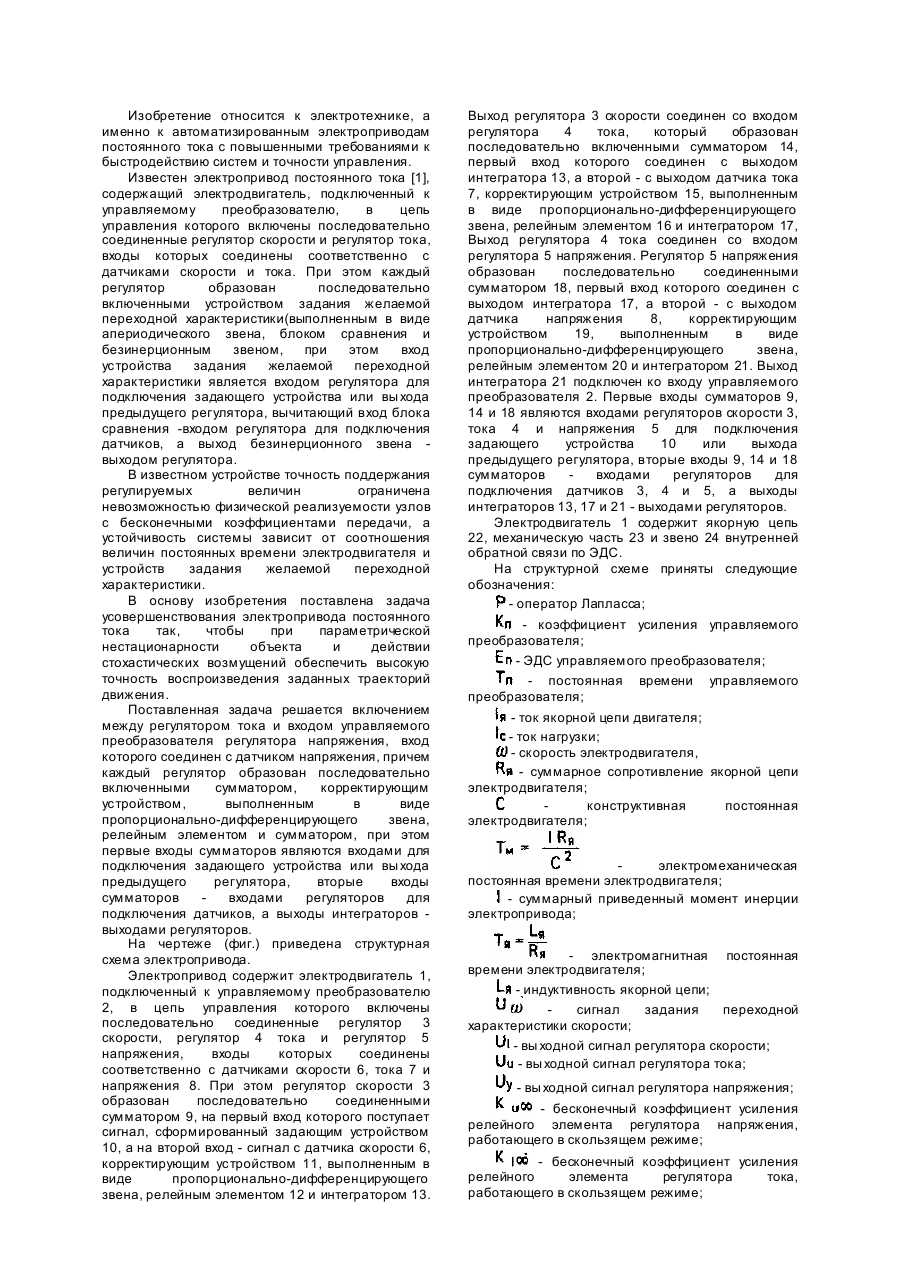
Электропривод постоянного тока, содержащий электродвигатель, подключенный к управляемому преобразователю, в цепь управления которого включены последовательно соединенные регуляторы скорости и тока, входы которых соединены соответственно с датчиками скорости и тока, отличающийся тем, что он дополнительно снабжен включенным между регулятором тока и входом управляемого преобразователя регулятором напряжения, вход которого соединен с датчиком...