Пазонний спосіб моделювання нейрона та пристрій для його здійснення
Номер патенту: 48521
Опубліковано: 15.08.2002
Автори: Цібульський Андрій Анатолійович, Бондаренко Михайло Федорович, Чередніков Павло Ілліч

Формула / Реферат
1. Пазонний спосіб моделювання нейрона, що включає прийом багатомірних вхідних сигналів і сигналу нагороди, перебування суми координат сигналу, що надійшов, генерацію сигналу команди при перевищенні суми координат величини порога, у залежності від прогнозу інформаційного значення сигналу, що надійшов, як сигнал нагороди використовують заздалегідь виділений вхідний сигнал, при прийомі вхідного сигналу встановлюють значення математичного чекання й імовірностей приходу сигналу нагороди за умови генерації сигналу команди й за його відсутності, величину порога генерації сигналу команди у відповідь на вхідний сигнал, що надійшов, зменшують чи збільшують у залежності від знака різниці встановлених математичного чекання й імовірності безпомилкового прогнозу цієї різниці, який відрізняється тим, що створюють на основі цифрової моделі схему заміщення принципу дії мембрани тіла і синаптичних входів нейрона, розробляють по останній еквівалентну пазонну аналогову електричну схему, еквівалентну пазонну аналогову електричну схему масштабуючого параметричного підсилювача-перетворювача, складають комбіновану електричну пазонну структуру моделі оригіналу, здійснюють інтегральну модуляцію енергоємних параметрів елементів моделі, забезпечують умови резонансу в параметричних зонних системах шляхом зміни інтенсивності і частоти поля накачування, уводять установлену систему біопазонних аналогій, у якій провідності іонних каналів, що гальмують і збуджують сигналом, концентрації жирових ліпідних і білкових доменів відповідають зворотні активні опори пазонної системи, «0» і «![]() » фази вихідних коливань, ємності «С» і індуктивності «L» резонансних контурів.
» фази вихідних коливань, ємності «С» і індуктивності «L» резонансних контурів.
2. Пристрій для моделювання нейрона, що містить просторово-тимчасовий суматор, інформаційні блоки синаптичних терміналів входу-виходу, блок завдання коефіцієнтів підсумовування, блок задання коефіцієнтів передачі, блок керування передачі даних, який відрізняється тим, що введено параметричний зонний генератор, блок керування і масштабуючий параметричний підсилювач-перетворювач, інформаційний вихід якого є виходом пристрою і керуючим входом просторово-тимчасового суматора, вхід просторово-тимчасового суматора підключений до N (де N=1,2,3) виходів блока задання коефіцієнтів підсумовування, до входів блока задання коефіцієнтів підсумовування підключені виходи блока задання коефіцієнтів передачі, входи яких підключені до інформаційних блоків синаптичних терміналів входу-виходу, виходи блока задання коефіцієнтів передачі також підключені до входу пристрою візуалізації, до входу останнього підключений вихід усього пристрою, вихід блока управління підключений до входу параметричного контуру, параметричний зонний генератор підключений до входів блока задання коефіцієнтів підсумовування, просторово-тимчасового суматора, масштабуючого параметричного підсилювача-перетворювача.
Текст
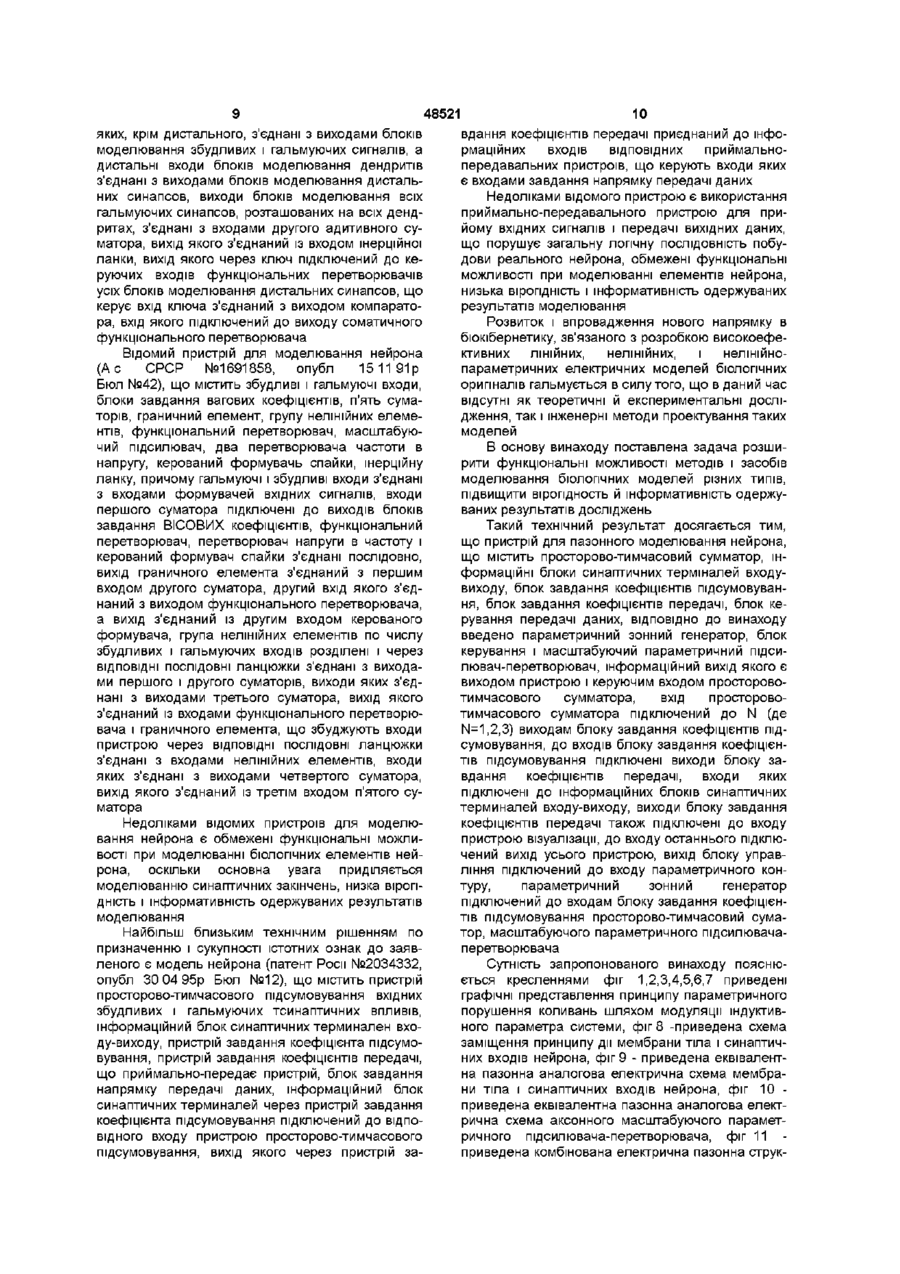
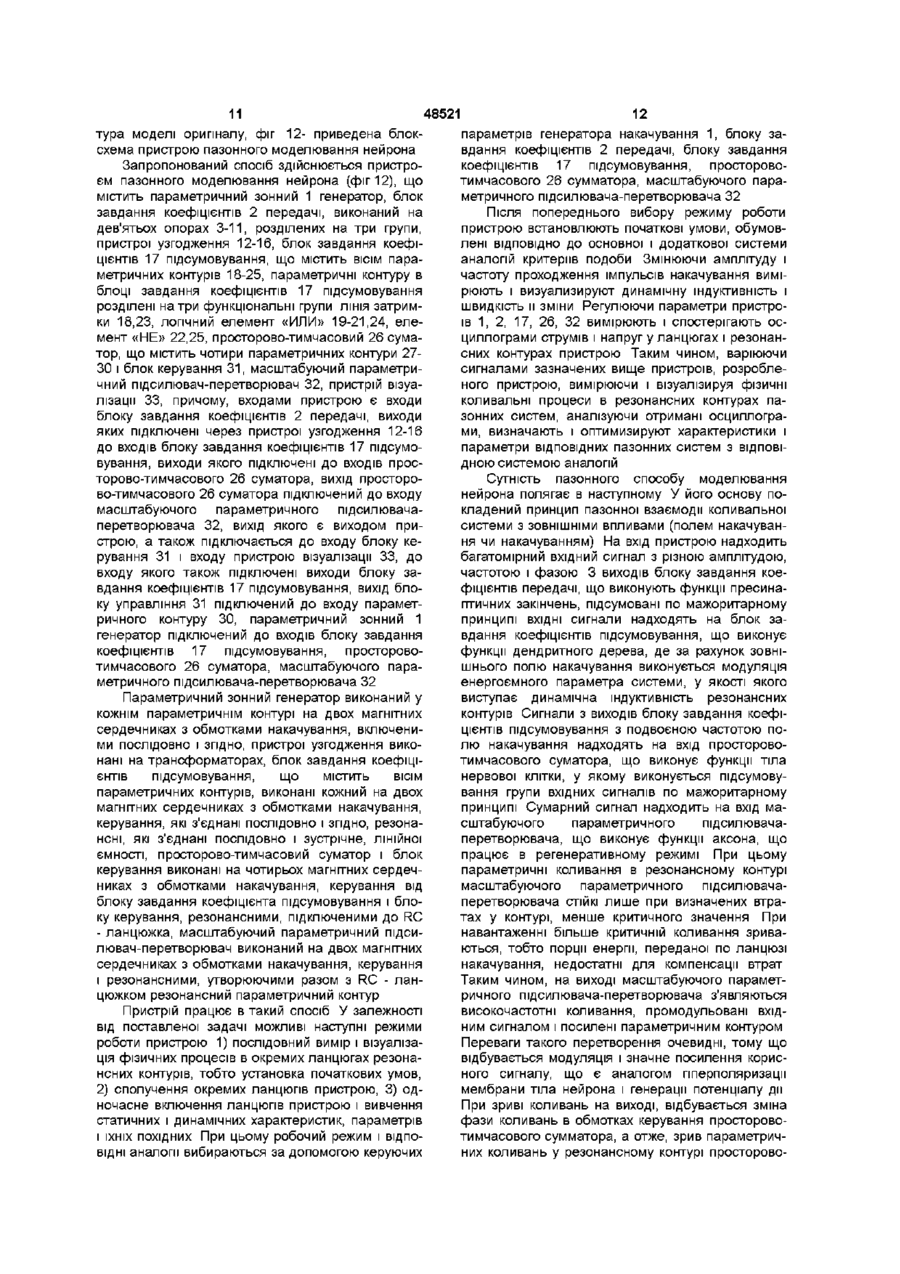
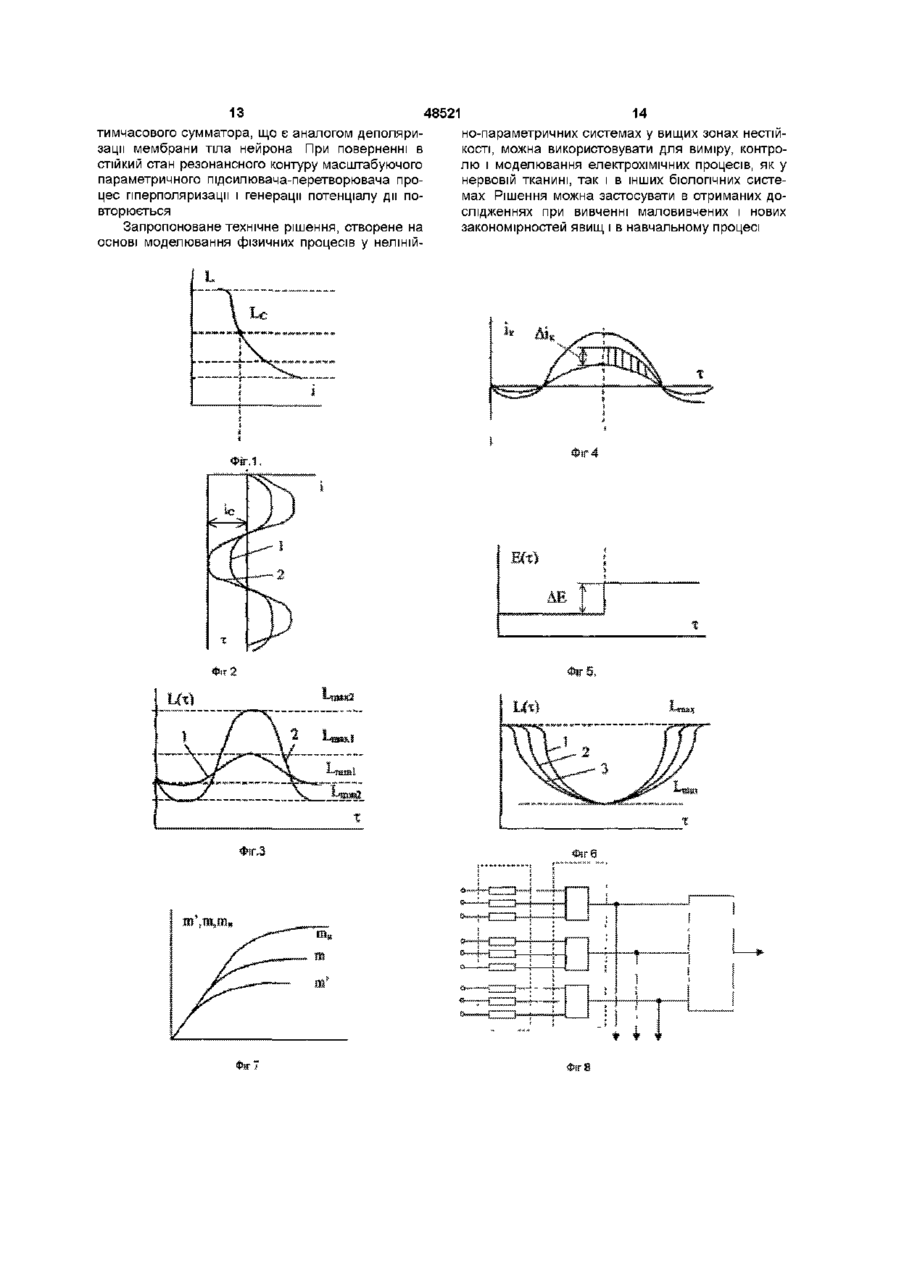
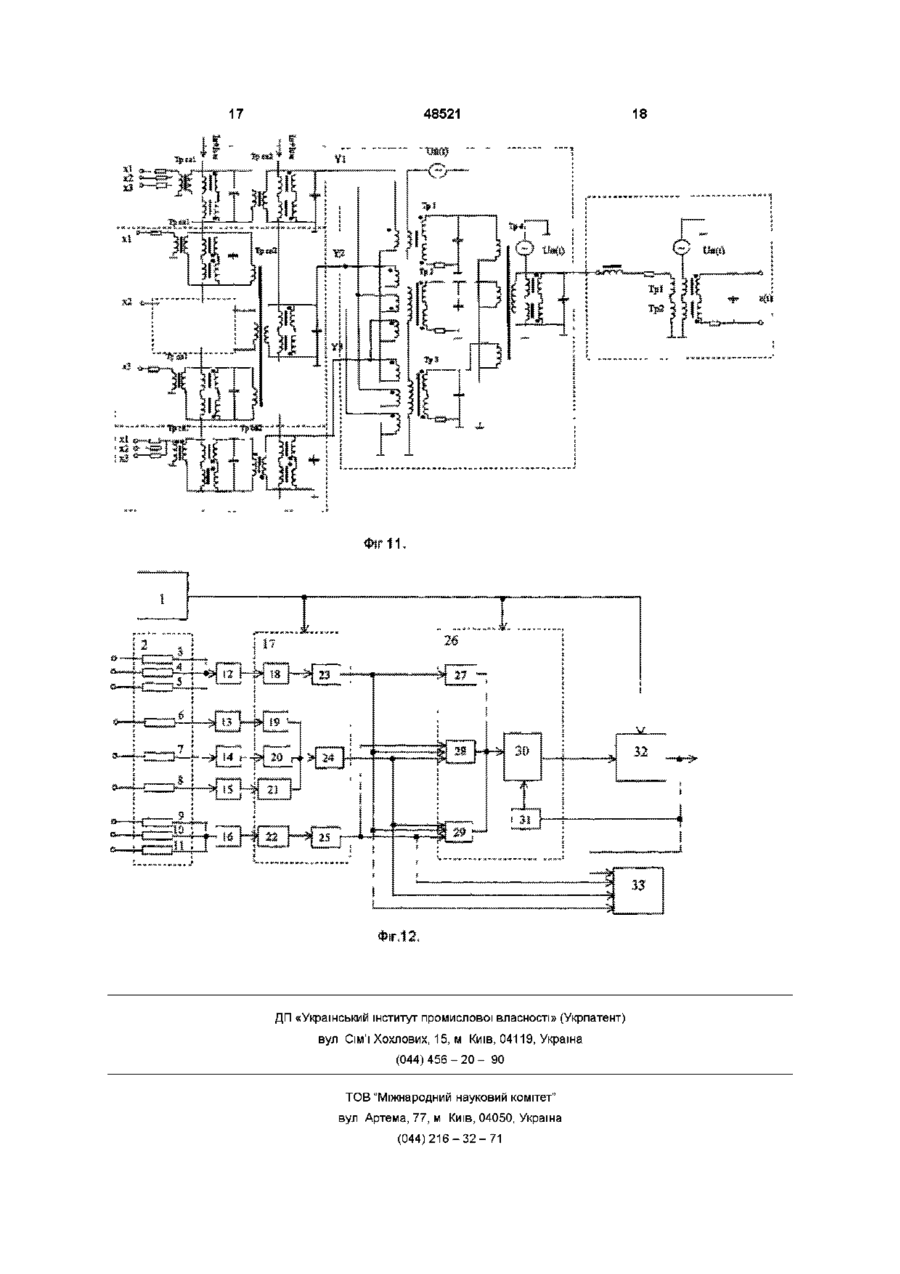
1 Пазонний спосіб моделювання нейрона, що включає прийом багатомірних вхідних сигналів і сигналу нагороди, перебування суми координат сигналу, що надійшов, генерацію сигналу команди при перевищенні суми координат величини порога, у залежності від прогнозу інформаційного значення сигналу, що надійшов, як сигнал нагороди використовують заздалегідь виділений вхідний сигнал, при прийомі вхідного сигналу встановлюють значення математичного чекання й імовірностей приходу сигналу нагороди за умови генерації сигналу команди й за його відсутності, величину порога генерації сигналу команди у ВІДПОВІДЬ на вхідний сигнал, що надійшов, зменшують чи збільшують у залежності від знака різниці встановлених математичного чекання й імовірності безпомилкового прогнозу цієї різниці, який відрізняється тим, що створюють на основі цифрової моделі схему заміщення принципу дії мембрани тіла і синаптичних входів нейрона, розробляють по останній еквівалентну пазонну аналогову електричну схему, еквівалентну пазонну аналогову електричну схему масштабуючого параметричного підсилювача-перетворювача, складають комбіновану електричну пазонну структуру моделі оригіналу, здійснюють інтегральну модуляцію енергоємних параметрів елементів моделі, забезпечують умови резонансу в парамет ричних зонних системах шляхом зміни інтенсивності і частоти поля накачування, уводять установлену систему бюпазонних аналогій, у якій провідності іонних каналів, що гальмують і збуджують сигналом, концентрації жирових ЛІПІДНИХ І білкових доменів відповідають зворотні активні опори пазонної системи, «0» і «#• » фази вихідних коливань, ємності «С» і індуктивності «L» резонансних контурів 2 Пристрій для моделювання нейрона, що містить просторово-тимчасовий суматор, інформаційні блоки синаптичних терміналів входу-виходу, блок завдання коефіцієнтів підсумовування, блок задання коефіцієнтів передачі, блок керування передачі даних, який відрізняється тим, що введено параметричний зонний генератор, блок керування і масштабуючий параметричний підсилювачперетворювач, інформаційний вихід якого є виходом пристрою і керуючим входом просторовотимчасового суматора, вхід просторовотимчасового суматора підключений до N (де N=1,2,3) виходів блока задания коефіцієнтів підсумовування, до входів блока задания коефіцієнтів підсумовування підключені виходи блока задания коефіцієнтів передачі, входи яких підключені до інформаційних блоків синаптичних терміналів входу-виходу, виходи блока задания коефіцієнтів передачі також підключені до входу пристрою візуалізацм, до входу останнього підключений вихід усього пристрою, вихід блока управління підключений до входу параметричного контуру, параметричний зонний генератор підключений до входів блока задания коефіцієнтів підсумовування, просторово-тимчасового суматора, масштабуючого параметричного підсилювача-перетворювача Винахід відноситься до нейрокібернетики і призначений для дослідження нервової системи методом пазонного аналогового моделювання, а також застосування в керуючих, інтелектуальних системах і в навчальному процесі Відомий спосіб математичного моделювання розподілу напруженості електричного полю в біологічному середовищі (КОЛІСНИКІВ О А , Марченко С Ф До моделювання електричного полю в нервовій тканині // Сб «Проблеми біоніки», Вип 12 1974, с 51-57), що включає як основні характеристики опису електричних процесів у нервовій тканині додаткові рівняння джерел сторонніх струмів Як ю 00 48521 основну характеристику електричних явищ прийнятий вектор напруженості електричного полю, з використанням рівняння Максвелла для середовищ володіючих провідністю ДЕ = at v u at де S(x)-рівняння a[s(x)] E + J c m ( x , t ) }, поверхні утвореної мембра нами нервової клітки, a[S(X)] - питома провідність середовища, j ( x , t ) - вектор ЩІЛЬНОСТІ сторонніх струмів, є, єо - діелектрична проникність середовища і повітря ВІДПОВІДНО, |j, [Jo -магнітна проникність середовища і повітря ВІДПОВІДНО, де L - ЩІЛЬНІСТЬ струму, викликуваного електричним полем у даній точки мембрани, j - ЩІЛЬНІСТЬ струму, викликуваного медіатором у постсинаптичній мембрані, j - ЩІЛЬНІСТЬ струму несинаптичного рецепторного джерела, n s (x) - вектор зовнішньої нормалі до поверхні мембрани, і - ЩІЛЬНІСТЬ струму, що генерує пейсмекерний потенціал, 5* S(x) - характеристична функція безлічі точок простору R3, що належать мембранам кліток Відомий спосіб математичного моделювання нервової тканини (Зозуля Ю И Метод багаторівневого аналізу нелінійних динамічних систем мозку // Сб «Проблеми біоніки», Вип 13 1974, с 6-9), що включає як основну характеристику впливу на будь-яку ділянку мембрани нейрона тільки однієї з нервових кліток, що має в цьому МІСЦІ синаптичний контакт, загальний розподіл частоти квантів медіатора на поверхні мембрани k-й нервової КЛІТКИ О К К В ( Х Д ) , що може бути подано сумою розподілів, що неперекриваються Q K I K B ( X Д)створюваним ним окремим нейроном тканини . _ N _ k кож k J=1 при S R ( x ) = О де N - загальна КІЛЬКІСТЬ нейронів у нервовій тканині, S r ( x ) = 0-рівняння поверхні мембрани к-й нервової КЛІТКИ Розподіл Q K I K B ( x , t ) визначається амплітудою і ШВИДКІСТЮ зміни нормальної до поверхні клітинної мембрани складової напруженості електричного полю в пресинаптичній мембрані j-ro нейрона Відхилення напруженості електричного полю в мембрані k-го нейрона від напруженості спокою цілком визначається зміною величини ЩІЛЬНОСТІ сторонніх струмів, що підтримуються активними ХІМІЧНИМИ процесами усередині мембран кліток нервової тканини Джерело сторонніх струмів нервової тканини можна умовно розділити на дві групи регульовані внутрикліточно і регульовані внекліточно До першої групи відносяться імпульсні джерела j u, що формують потенціал дії і пейсмекерні потенціали В другу групу входять синоптичні j с і неси 4 наптичні JRHC рецепторні джерела Сторонні струми JRu, JRc, JRHC протікають через різні пори мембрани кго нейрона, тому загальний сторонній струм мембрани є ЛІНІЙНОЮ комбінацією цих струмів Недоліками відомих способів математичного моделювання є розглядаються процеси виникнення сторонніх струмів без обліку генерації потенціалу дм в постсинапсах аксона, причому опис виконується на рівні нестаціонарних ЛІНІЙНИХ І стаціонарних нелінійних моделей, при описі електричних процесів, що протікають у мембрані нейрона, використовується загальний ПІДХІД на основі принципів електродинаміки і рівнянь Максвелла Найбільш близьким до заявленого технічного рішення є спосіб моделювання нейрона (А с СРСР №1589296, опубл ЗО 08 90р Бюл №32), що включає прийом багатомірних вхідних сигналів і сигналу нагороди, перебування суми координат сигналу, що надійшов, генерацію сигналу команди при перевищенні суми координат величини порога, у залежності від прогнозу інформаційного значення сигналу, що надійшов, як сигнал нагороди використовують заздалегідь виділений вихідний сигнал, установлюють при прийомі вхідного сигналу значення математичного чекання й імовірностей приходу сигналу нагороди за умови генерації сигналу команди й у його відсутності, величину порога генерації сигналу команди у ВІДПОВІДЬ на вхідний сигнал, що надійшов, зменшують чи збільшують у залежності від знака різниці встановлених математичних чекань й імовірності безпомилкового прогнозу цієї різниці Недоліками такого технічного рішення є обмежені функціональні можливості, тому що модель описує лише генерацію сигналу команди без обліку процесів у складових елементах (дендритах і аксоні), відсутні нелінійні і нелінійно-параметричні залежності між параметрами моделі і ЗОВНІШНІХ ВПЛИВІВ, невстановлена система аналогій між параметрами елементів моделі і біологічним прототипом В основу винаходу поставлена задача розширити функціональні можливості способу на основі створення ЛІНІЙНИХ, нелінійних, нелінійнопараметричних моделей елементів біологічних систем, розробити принцип параметричного зонного (пазонного) моделювання процесів, що відбуваються в нервовій КЛІТЦІ, увести систему бюпазонних аналогій Запропоноване технічне рішення є актуальною задачею маючей істотне значення для створення нового напрямку моделювання біологічних процесів на основі механізму параметричних зонних взаємодій коливальної системи з полем накачування Такий технічний результат досягається тим, що пазонний спосіб моделювання нейрона, що включає прийом багатомірних вхідних сигналів і сигналу нагороди, перебування суми координат сигналу, що надійшов, генерацію сигналу команди при перевищенні суми координат величини порога, у залежності від прогнозу інформаційного значення сигналу, що надійшов, як сигнал нагороди використаний заздалегідь виділений вхідний сигнал, при прийомі вхідного сигналу встановлюють 48521 значення математичного чекання и імовірностей приходу сигналу нагороди за умови генерації сигналу команди й у його відсутності, величину порога генерації сигналу команди у ВІДПОВІДЬ на вхідний сигнал, що надійшов, зменшують чи збільшують у залежності від знака різниці встановлених математичного чекання й імовірності безпомилкового прогнозу цієї різниці, ВІДПОВІДНО до винаходу створюють на основі цифрової моделі схему заміщення принципу дії мембрани тіла і синаптичних входів нейрона, розробляють по останньої еквівалентну пазонну аналогову електричну схему, еквівалентну пазонну аналогову електричну схему масштабуючого параметричного підсилювача-перетворювача, складають комбіновану електричну пазонну структуру моделі оригіналу, здійснюють інтегральну модуляцію енергоємних параметрів елементів моделі, забезпечують умови резонансу в параметричних зонних системах шляхом зміни інтенсивності і частоти полю накачування, уводять установлену систему бюпазонних аналогій, у якій провідності іонних каналів, що гальмують і збуджують сигналам, концентрації жирових ЛІПІДНИХ і білкових доменов відповідають зворотні активні опори (провідності) пазонной системи, «0» і «ті » фази вихідних коливань, ємності «С» і індуктивності «L» резонансних контурів Для забезпечення параметричного резонансу необхідне дотримання трьох умов 1) необхідно, щоб величина відносної зміни параметра (глибина модуляції) m перевищувала декремент загасання контуру 5 (5 = R/2L , де R активний опір обмоток контуру) Lmav r -max -mm m= L -Lr r -max+'-mm О) ДЄ l_max, Lmm- ЗНЗЧЄННЯ ІНДуКТИВНОСТЄЙ КОНТуру, 2) необхідно, щоб частота зміни параметра і «середня» власна частота контуру знаходилися в кратному відношенні, 3) необхідно, щоб зміна параметра досягалася максимального значення у визначені моменти протягом періоду коливань, З першої умови можна зробити висновок, що коливальна система має поріг параметричного порушення Друга і третя умови указують на те, що між частотами і початковими фазами коливань контуру і зміни накачування повинне існувати цілком визначене співвідношення При інтенсивних ЗОВНІШНІХ полях накачування параметри нелінійного елемента періодично досягають граничних значень (при насиченні індуктивного елемента l_min=const), при цьому коефіцієнт глибини модуляції параметра також досягає граничного значення (т»1) і утрачає фізичний зміст Коефіцієнт модуляції для параметричної взаємодії хвиль і коливань у системах з розподіленими і зосередженими параметрами відіграє важливу роль 1) визначає закономірність зміни динамічної індуктивності, інтенсивність ЗОВНІШНІХ впливів і пазонних взаємодій, 2) визначає тип диференціального рівняння, що описує пазонну систему, 3) визначає метод рішення отриманого диференціального рівняння Для першого випадку динамічна індуктивність (енергоємний параметр системи) змінюється по гармонійному законі з частотою Q msmQ(t (2) де l_o, Co - ПОСТІЙНІ (статичні) реактивних параметрів, Q - кутова частота полю накачування Нехай індуктивний елемент містить магнітний сердечник перетином S і середньою магнітною ЛІНІЄЮ І, обмотки w при апроксимації В(Н) функцією H=ashpB, де а, [3- коефіцієнти апроксимації Тоді ЗМІНИ динамічної індуктивності І можна описати виразом B m smcot) 2 L w S (3) де І_в = L m - «повітряне» мінімальне значення m індуктивності, Таким чином, коефіцієнт глибини модуляції m входить у закон зміни індуктивності і визначає характер коливань у параметричному контурі Покажемо, що коефіцієнт глибини модуляції m відіграє головну роль при описі енергетичних процесів, визначаючи як кількісну, так і якісну суть параметричного порушення коливань На фіг 1а 1д приведений принцип параметричного порушення коливань шляхом модуляції індуктивного параметра елемента з несиметричною характеристикою Ці) (фіг 1 ), при постійному зсуві іс і накачуванню синусоїдальними струмами н >І2 (криві 1 і 2 фіг 2) Унаслідок того, що амплітуда струму накачування l m мала, то ПОЗИТИВНІ І негативні збільшення індуктивного параметра 2ДІ_і=І_тахі-І-тіпі (крива 1, фіг 3) можна вважати однаковими і коефіцієнти глибини модуляції т ' визначається виразом ДЬ| m =L ер L ер (4) -ер При збільшенні амплітуди струму накачування до величини І2 починає позначатися нелінійна залежність Ці), ПОЗИТИВНІ І негативні збільшення вже не будуть дорівнюати один одному, при цьому Ц ± Цр (крива 2, фіг 4 ) ВІДПОВІДНО ДО класичної теорії, коефіцієнти відносної модуляції m визначають збільшення струму Ді к у контурі (фіг 4) і енергії ДЕ (фіг 5) у системі за один період коливань, з урахуванням початкової енергії Ео вираженням ДЕ = 4 т Е 0 , (5) при цьому для порушення коливань енергія ДЕ, внесена в систему, повинна перевищувати втрати в системі, тобто виконання умови т>ті5/2 Крім того, при розрахунку збільшення енергії ДЕ у момент стрибка індуктивності ДІ_ необхідно ще виконання додаткової умови |_с» ДІ_, чи т « і Ця умова вимагає малих змін величини ДІ_, причому на ЛІНІЙНІЙ ДІЛЯНЦІ кривої Ці) 3 умови (5) можна зробити висновок, що коливальна система має поріг параметричного порушення Це дозволяє уточнити поняття про характер зовнішнього впливу - накачуванню, що збуджує нелінійно 48521 параметричну систему Поле накачування буде називатися «сильним полем», «інтенсивною взаємодією» чи «ЗОВНІШНІМ впливом великої потужності», якщо поле буде граничним чи заграничним для даної нелінійно-параметричної системи Таке поле здатне збудити коливання як у першої, так і у вищих зонах нестійкості Як показали дослідження авторів, вже в першій зоні нестійкості реактивні елементи працюють у нелінійному режимі, розмах зміни параметра реактивного елемента досягає граничного постійного значення ДІ_ = Lmaxl_min=const, що добре видно на графіку І_(т) (крива 1, фіг Б ) На фіг 7 приведена залежність пї m від струму накачування Це означає, що граничного значення досягають і коефіцієнти гтї і т , тому що вони визначаються величиною ДІ_ Подальше збільшення струму накачування приводить до зменшення тільки площі, обмеженої кривої І_(т) і віссю х (криві 2 і 3, фіг 6 ) Тому класичні коефіцієнти гтї (4) і m (1) утрачають свій зміст, а отже, утрачають зміст диференціальні рівняння, що описують процеси в резонансних контурах і порушуються класичні умови параметричного резонансу Крім того, порушуються класичні представлення про механізм параметричного порушення коливань у вищих зонах нестійкості Цю проблему можна розв'язати шляхом використання ВІДПОВІДНИХ динамічних характеристик і параметрів У даному технічному рішенні використовується безупинна зміна площі, обмеженої кривої І_(т) і віссю часу при ЗМІНІ ПОЛЮЧИ накачування У вирази La (x) (2), (3) входять параметри полів накачування і постійного зсуву, що дозволяє КІЛЬКІСНО зв'язати обмін енергією в системі зі зміною зазначеної площі Тоді площу, обмежену кривої динамічного параметра La (x) і віссю часу за період Т модуляції параметра, назвемо інтегральним параметром Lu і визначимо виразом Т L U = jL a (x)dx О Модуляцію параметра, що використовує цей параметр, назвемо інтегральною модуляцією параметра Максимальному значенню інтегрального параметра Lumax відповідає добуток Lc чи Lmax на період Т, тоді Lumax ~ І L c - I L m a x ~ Унаслідок того, що при збільшенні інтенсивності накачування зменшується інтегральний параметр Lu, мінімальним значенням параметра будемо вважати величину мінімального значення інтегрального параметра Lumin, рівного L, т JUx)dixmm 0 З урахуванням уведеНИХ ПОНЯТЬ LUmax І LUmin, розмах інтегрального параметра визначається виразом iil_u— I Lumax" I LUmin Перетворимо цей вираз таким чином 1т A L u = T ( L m a x - L u ) , Lu=-jL3(x)dx, 1 О де L u - середнє інтегральне значення параметра Оцінку впливу полю накачування на фізичні 8 процеси в коливальній системі можна здійснювати за допомогою величин Lu і L u Розділимо розмах ULU на величину TLmax і визначимо коефіцієнт інтегральної модуляції параметра у виді mu=1 = 1 L m a x Коефіцієнт m u (фіг 7 ) враховує геометричні й електричні параметри елементів і систем, тому його можна застосовувати для розрахунків при будь-яких интенсивностях внутрішніх сил і полів накачування Введений у такий спосіб коефіцієнт m u несе також інформацію про ефективність перетворення параметричних зонних систем Визначимо закон зміни енергії в контурі з урахуванням інтегральної модуляції параметрів у такий спосіб Внесена в контур енергія при негативній швидкості зміни параметра визначається вираженням ДЕ|_=тиЕо, де Ео - початковий запас енергії в контурі Енергія втрат за період зміни параметра пропорційна ВІДПОВІДНО коефіцієнту загасання 5 і дорівнює величині ДЕ5=ті5Ео, тоді повна зміна енергії ДЕ визначається різницею ДЕ= AEL-AE5=Eo(mu-7i5) (6) Нехай за час dt у контур вноситься порція енергії AE«dE Тоді, ВІДПОВІДНО ДО виразу (6), відносна зміна енергії в контурі дорівнює d/E=(mu-7i5)dt Після інтегрування цього вираження одержимо закономірність зміни енергії в нелінійному контурі E=Eoexp(mu-7i5)t (7) Фізичний ЗМІСТ закону (7) для різних значень коефіцієнтів m u і 5 зводиться до виконання наступних умов mu7i5- система хитлива Відомий пристрій для моделювання нейрона (патент Роси №2028669, опубл 09 02 95р Бюл №4), що містить гальмуючі і збудливі входи, блок моделювання порушення синапсов, формувач вхідних сигналів, блок завдання вагових коефіцієнтів, блок моделювання дендритів, аддитивный суматор, соматичний функціональний перетворювач, керуючі входи, дендритні виходи, блоки моделювання гальмуючих і збудливих синапсов, блок моделювання дистальних синапсов, перетворювач частоти в напругу, компаратор, ключ, інерційну ланку, причому вхід функціонального перетворювача з'єднаний з виходом блоку завдання вагових коефіцієнтів, а вихід синаптичного перетворювача напруги в частоту є виходом блоку моделювання дистального синапса, кожний з який містить компаратор і ключ, у кожнім блоці вхід компаратора з'єднаний з виходом синаптичного функціонального перетворювача, а вихід компаратора підключений до керуючого входу ключа, вихід блоку завдання вагових коефіцієнтів з'єднаний через ключ з виходом синаптичного перетворювача напруги в частоту, вихід соматичного перетворювача напруги в частоту є виходом пристрою, а вхід з'єднаний з виходом соматичного функціонального перетворювача, вхід якого з'єднаний з виходом адитивного суматора, входи якого підключені до виходів блоків моделювання дендритів, входи кожного з 48521 яких, крім дистального, з'єднані з виходами блоків моделювання збудливих і гальмуючих сигналів, а дистальні входи блоків моделювання дендритів з'єднані з виходами блоків моделювання дистальних синапсов, виходи блоків моделювання всіх гальмуючих синапсов, розташованих на всіх дендритах, з'єднані з входами другого адитивного суматора, вихід якого з'єднаний із входом інерційної ланки, вихід якого через ключ підключений до керуючих входів функціональних перетворювачів усіх блоків моделювання дистальних синапсов, що керує вхід ключа з'єднаний з виходом компаратора, вхід якого підключений до виходу соматичного функціонального перетворювача Відомий пристрій для моделювання нейрона (Ас СРСР №1691858, опубл 1511 91 р Бюл №42), що містить збудливі і гальмуючі входи, блоки завдання вагових коефіцієнтів, п'ять суматорів, граничний елемент, групу нелінійних елементів, функціональний перетворювач, масштабуючий підсилювач, два перетворювача частоти в напругу, керований формувачь спайки, інерційну ланку, причому гальмуючі і збудливі входи з'єднані з входами формувачей вхідних сигналів, входи першого суматора підключені до виходів блоків завдання БІСОВИХ коефіцієнтів, функціональний перетворювач, перетворювач напруги в частоту і керований формувач спайки з'єднані послідовно, вихід граничного елемента з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом функціонального перетворювача, а вихід з'єднаний із другим входом керованого формувача, група нелінійних елементів по числу збудливих і гальмуючих входів розділені і через ВІДПОВІДНІ ПОСЛІДОВНІ ланцюжки з'єднані з виходами першого і другого суматорів, виходи яких з'єднані з виходами третього суматора, вихід якого з'єднаний із входами функціонального перетворювача і граничного елемента, що збуджують входи пристрою через ВІДПОВІДНІ ПОСЛІДОВНІ ланцюжки з'єднані з входами нелінійних елементів, входи яких з'єднані з виходами четвертого суматора, вихід якого з'єднаний із третім входом п'ятого суматора Недоліками відомих пристроїв для моделювання нейрона є обмежені функціональні можливості при моделюванні біологічних елементів нейрона, оскільки основна увага приділяється моделюванню синаптичних закінчень, низка вірогідність і інформативність одержуваних результатів моделювання Найбільш близьким технічним рішенням по призначенню і сукупності істотних ознак до заявленого є модель нейрона (патент Роси №2034332, опубл ЗО 04 95р Бюл №12), що містить пристрій просторово-тимчасового підсумовування вхідних збудливих і гальмуючих тсинаптичних впливів, інформаційний блок синаптичних терминален входу-виходу, пристрій завдання коефіцієнта підсумовування, пристрій завдання коефіцієнтів передачі, що приймально-передає пристрій, блок завдання напрямку передачі даних, інформаційний блок синаптичних терминалей через пристрій завдання коефіцієнта підсумовування підключений до ВІДПОВІДНОГО входу пристрою просторово-тимчасового підсумовування, вихід якого через пристрій за 10 вдання коефіцієнтів передачі приєднаний до інформаційних входів ВІДПОВІДНИХ приймальнопередавальних пристроїв, що керують входи яких є входами завдання напрямку передачі даних Недоліками відомого пристрою є використання приймально-передавального пристрою для прийому вхідних сигналів і передачі вихідних даних, що порушує загальну логічну ПОСЛІДОВНІСТЬ побудови реального нейрона, обмежені функціональні можливості при моделюванні елементів нейрона, низька вірогідність і інформативність одержуваних результатів моделювання Розвиток і впровадження нового напрямку в бюкібернетику, зв'язаного з розробкою високоефективних ЛІНІЙНИХ, нелінійних, і нелінійнопараметричних електричних моделей біологічних оригіналів гальмується в силу того, що в даний час відсутні як теоретичні й експериментальні дослідження, так і інженерні методи проектування таких моделей В основу винаходу поставлена задача розширити функціональні можливості методів і засобів моделювання біологічних моделей різних типів, підвищити віропдность й інформативність одержуваних результатів досліджень Такий технічний результат досягається тим, що пристрій для пазонного моделювання нейрона, що містить просторово-тимчасовий сумматор, інформаційні блоки синаптичних терміналей входувиходу, блок завдання коефіцієнтів підсумовування, блок завдання коефіцієнтів передачі, блок керування передачі даних, ВІДПОВІДНО ДО винаходу введено параметричний зонний генератор, блок керування і масштабуючий параметричний підсилювач-перетворювач, інформаційний вихід якого є виходом пристрою і керуючим входом просторовотимчасового сумматора, вхід просторовотимчасового сумматора підключений до N (де N=1,2,3) виходам блоку завдання коефіцієнтів підсумовування, до входів блоку завдання коефіцієнтів підсумовування підключені виходи блоку завдання коефіцієнтів передачі, входи яких підключені до інформаційних блоків синаптичних терминалей входу-виходу, виходи блоку завдання коефіцієнтів передачі також підключені до входу пристрою візуалізацм, до входу останнього підключений вихід усього пристрою, вихід блоку управління підключений до входу параметричного контуру, параметричний зонний генератор підключений до входам блоку завдання коефіцієнтів підсумовування просторово-тимчасовий суматор, масштабуючого параметричного підсилювачаперетворювача Сутність запропонованого винаходу пояснюється кресленнями фіг 1,2,3,4,5,6,7 приведені графічні представлення принципу параметричного порушення коливань шляхом модуляції індуктивного параметра системи, фіг 8 -приведена схема заміщення принципу дії мембрани тіла і синаптичних входів нейрона, фіг 9 - приведена еквівалентна пазонна аналогова електрична схема мембрани тіла і синаптичних входів нейрона, фіг 10 приведена еквівалентна пазонна аналогова електрична схема аксонного масштабуючого параметричного підсилювача-перетворювача, фіг 11 приведена комбінована електрична пазонна струк 48521 12 11 тура моделі оригіналу, фіг 12- приведена блокпараметрів генератора накачування 1, блоку засхема пристрою пазонного моделювання нейрона вдання коефіцієнтів 2 передачі, блоку завдання коефіцієнтів 17 підсумовування, просторовоЗапропонований спосіб здійснюється пристротимчасового 26 сумматора, масштабуючого параєм пазонного моделювання нейрона (фіг 12), що метричного підсилювача-перетворювача 32 містить параметричний зонний 1 генератор, блок завдання коефіцієнтів 2 передачі, виконаний на Після попереднього вибору режиму роботи дев'ятьох опорах 3-11, розділених на три групи, пристрою встановлюють початкові умови, обумовпристрої узгодження 12-16, блок завдання коефілені ВІДПОВІДНО до основної і додаткової системи цієнтів 17 підсумовування, що містить ВІСІМ парааналогій критеріїв подоби Змінюючи амплітуду і метричних контурів 18-25, параметричні контуру в частоту проходження імпульсів накачування виміблоці завдання коефіцієнтів 17 підсумовування рюють і визуализируют динамічну індуктивність і розділені натри функціональні групи ЛІНІЯ затримшвидкість и зміни Регулюючи параметри пристроки 18,23, логічний елемент «ИЛИ» 19-21,24, елеїв 1, 2, 17, 26, 32 вимірюють і спостерігають осмент «НЕ» 22,25, просторово-тимчасовий 26 сумациллограми струмів і напруг у ланцюгах і резонантор, що містить чотири параметричних контури 27сних контурах пристрою Таким чином, варіюючи 30 і блок керування 31, масштабуючий параметрисигналами зазначених вище пристроїв, розроблечний підсилювач-перетворювач 32, пристрій візуаного пристрою, вимірюючи і візуалізируя фізичні лізацм 33, причому, входами пристрою є входи коливальні процеси в резонансних контурах паблоку завдання коефіцієнтів 2 передачі, виходи зонних систем, аналізуючи отримані осциллограяких підключені через пристрої узгодження 12-16 ми, визначають і оптимизируют характеристики і до входів блоку завдання коефіцієнтів 17 підсумопараметри ВІДПОВІДНИХ пазонних систем з ВІДПОВІвування, виходи якого підключені до входів просДНОЮ системою аналогій торово-тимчасового 26 суматора, вихід простороСутність пазонного способу моделювання во-тимчасового 26 суматора підключений до входу нейрона полягає в наступному У його основу помасштабуючого параметричного підсилювачакладений принцип пазонної взаємодії коливальної перетворювача 32, вихід якого є виходом присистеми з ЗОВНІШНІМИ впливами (полем накачуванстрою, а також підключається до входу блоку кеня чи накачуванням) На вхід пристрою надходить рування 31 і входу пристрою візуалізацм 33, до багатомірний вхідний сигнал з різною амплітудою, входу якого також підключені виходи блоку зачастотою і фазою 3 виходів блоку завдання коевдання коефіцієнтів 17 підсумовування, вихід блофіцієнтів передачі, що виконують функції пресинаку управління 31 підключений до входу параметптичних закінчень, підсумовані по мажоритарному ричного контуру ЗО, параметричний зонний 1 принципі ВХІДНІ сигнали надходять на блок загенератор підключений до входів блоку завдання вдання коефіцієнтів підсумовування, що виконує коефіцієнтів 17 підсумовування, просторовофункції дендритного дерева, де за рахунок зовнітимчасового 26 суматора, масштабуючого парашнього полю накачування виконується модуляція метричного підсилювача-перетворювача 32 енергоємного параметра системи, у якості якого виступає динамічна індуктивність резонансних Параметричний зонний генератор виконаний у контурів Сигнали з виходів блоку завдання коефікожнім параметричнім контурі на двох магнітних цієнтів підсумовування з подвоєною частотою посердечниках з обмотками накачування, включенилю накачування надходять на вхід просторовоми послідовно і згідно, пристрої узгодження викотимчасового суматора, що виконує функції тіла нані на трансформаторах, блок завдання коефіцінервової клітки, у якому виконується підсумовуєнтів підсумовування, що містить ВІСІМ вання групи вхідних сигналів по мажоритарному параметричних контурів, виконані кожний на двох принципі Сумарний сигнал надходить на вхід мамагнітних сердечниках з обмотками накачування, сштабуючого параметричного підсилювачакерування, які з'єднані послідовно і згідно, резонаперетворювача, що виконує функції аксона, що нсні, які з'єднані послідовно і зустрічне, лінійної працює в регенеративному режимі При цьому ємності, просторово-тимчасовий суматор і блок параметричні коливання в резонансному контурі керування виконані на чотирьох магнітних сердечмасштабуючого параметричного підсилювачаниках з обмотками накачування, керування від перетворювача СТІЙКІ лише при визначених втраблоку завдання коефіцієнта підсумовування і блотах у контурі, менше критичного значення При ку керування, резонансними, підключеними до RC навантаженні більше критичній коливання зрива- ланцюжка, масштабуючий параметричний підсиються, тобто порції енергії, переданої по ланцюзі лювач-перетворювач виконаний на двох магнітних накачування, недостатні для компенсації втрат сердечниках з обмотками накачування, керування Таким чином, на виході масштабуючого параметі резонансними, утворюючими разом з RC - ланричного підсилювача-перетворювача з'являються цюжком резонансний параметричний контур високочастотні коливання, промодульовані вхідПристрій працює в такий спосіб У залежності ним сигналом і посилені параметричним контуром від поставленої задачі можливі наступні режими Переваги такого перетворення очевидні, тому що роботи пристрою 1) послідовний вимір і візуалізавідбувається модуляція і значне посилення корисція фізичних процесів в окремих ланцюгах резонаного сигналу, що є аналогом пперполяризацм нсних контурів, тобто установка початкових умов, мембрани тіла нейрона і генерації потенціалу дії 2) сполучення окремих ланцюгів пристрою, 3) одПри зриві коливань на виході, відбувається зміна ночасне включення ланцюгів пристрою і вивчення фази коливань в обмотках керування просторовостатичних і динамічних характеристик, параметрів тимчасового сумматора, а отже, зрив параметричі їхніх похідних При цьому робочий режим і ВІДПОних коливань у резонансному контурі просторовоВІДНІ аналогії вибираються за допомогою керуючих 13 48521 14 тимчасового сумматора, що є аналогом деполярино-параметричних системах у вищих зонах нестійзації мембрани тіла нейрона При поверненні в кості, можна використовувати для виміру, контростійкий стан резонансного контуру масштабуючого лю і моделювання електрохімічних процесів, як у параметричного підсилювача-перетворювача пронервовій тканині, так і в інших біологічних систецес пперполяризацм і генерації потенціалу дії помах Рішення можна застосувати в отриманих довторюється слідженнях при вивченні маловивчених і нових Запропоноване технічне рішення, створене на закономірностей явищ і в навчальному процесі основі моделювання фізичних процесів у неліній ФІҐ.З 15 48521 >ЇГ 16 17 48521 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 18
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for simulating a neuron and a device for realization thereof
Автори англійськоюBondarenko Mykhailo Fedorovych, Cherednikov Pavlo Illich
Назва патенту російськоюСпособ моделирования нейрона и устройство для его осуществления
Автори російськоюБондаренко Михаил Федорович, Чередников Павел Ильич
МПК / Мітки
МПК: G06G 7/60
Мітки: спосіб, нейрона, моделювання, пазонний, пристрій, здійснення
Код посилання
<a href="https://ua.patents.su/9-48521-pazonnijj-sposib-modelyuvannya-nejjrona-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Пазонний спосіб моделювання нейрона та пристрій для його здійснення</a>
Пазонний спосіб моделювання електричних машин та пристрій для його здійснення
Номер патенту: 28324
Опубліковано: 16.10.2000
Автори: Чередніков Ілля Павлович, Чередніков Павел Ілліч, Бондаренко Михайло Федорович, Куценко Юрій Васильович
Мітки: пазонний, електричних, моделювання, машин, здійснення, пристрій, спосіб
Формула / Реферат:
1. Пазонный способ моделирования электрических машин, включающий интегральную модуляцию энергоемкого параметра пазонных систем электрической структуры, изменение интервала времени между экстремумами скорости изменения параметра за период, при этом выполняют условия квантового пазонного резонанса, возбуждают колебания в пазонных системах путем квантования и вложения пазонов энергии в собственные колебания, составляют эквивалентные схемы связей...
Пристрій для моделювання нейрона
Номер патенту: 25525
Опубліковано: 30.10.1998
Автори: Спіченков Юрій Миколайович, Смердов Андрій Андрійович, Романишин Юрій Михайлович
МПК: G06G 7/60, G09B 23/26
Мітки: нейрона, моделювання, пристрій
Формула / Реферат:
Пристрій для моделювання нейрона, що містить групу каналів сигналів збудження, групу каналів сигналів гальмування та одновібратор, вихід якого є виходом пристрою, який відрізняється тим, що в нього додатково введені послідовно з'єднані суматор та пороговий елемент у вигляді схеми порівняння на більше, а кожний з каналів сигналів збудження та гальмування виконаний у вигляді перетворювача струму в напругу, вихід якого з'єднаний з входом...
Пазонний спосіб моделювання первинних джерел енергосистеми з енергоносіями різноманітної природи
Номер патенту: 43056
Опубліковано: 15.11.2001
Автори: Бондаренко Михайло Федорович, Чередніков Павел Ілліч, Сліпченко Миколай Іванович, Чередніков Ілля Павлович
Мітки: спосіб, пазонний, енергосистеми, первинних, різноманітної, енергоносіями, моделювання, джерел, природи
Формула / Реферат:
Пазонний спосіб моделювання первинних джерел енергосистеми з енергоносіями різноманітної природи, що включає інтегральну модуляцію енергоємного параметра пазонних систем електричної структури, що з'єднують відповідно до структури оригіналу, складають еквівалентні схеми зв'язків і чинних обертальних сил, будують математичну модель щодо узагальнених координат, сил, швидкостей і імпульсів, складають за еквівалентною схемою та математичною...
Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 48381
Опубліковано: 15.08.2002
Автори: Сокол Євген Іванович, Голубов Валерій Юрійович, Суботін Юрій Володимирович, Кипенський Андрій Володимирович
МПК: H02M 7/12
Мітки: тиристорним, спосіб, прямого, пристрій, мікропроцесорного, здійснення, керування, випрямлячем
Формула / Реферат:
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразомF(N)=Nmax-N,де F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;Nmax - число (постійна величина), яке при запису в таймер забезпечує формування максимального кута керування;N - вихідне число, відповідне сигналу...
Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.01.2002
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: фазоманіпульованих, підсилення, амплітудно-модульованих, пристрій, здійснення, спосіб, сигналів
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Попередній патент: Система автоматизованого керування робочим органом транспортної мережі
Наступний патент: Спосіб визначення арсенату у воді
Випадковий патент: Спосіб діагностики розвитку атеросклерозу