М’язовий орнітоптер-планер

Формула / Реферат
1. М'язовий орнітоптер-планер, що має м'язовий двигун, кінематично зв'язані з ним одну або дві пари махальних крил, який відрізняється тим, що до опори тулуба (1) м'язового двигуна прикріплена утворена зі стрижнів (8, 9, 10, 12) рама, до верхніх задніх кутів якої нахилені відносно обрію осі (13, 14) махальних крил, які одним кінцем прикріплені за допомогою нерухомих кульових шарнірів (15, 16), за якими ці осі (13, 14) мають продовження у вигляді кронштейнів (30, 31), між якими натягнута струна (32), а для її противаги струна (33) натягнута між передньою частиною осей (13, 14), між рухливими передніми кульовими шарнірами (17, 18), які по кінематичному ланцюгу керування з'єднані через проміжні тяги (19, 20), кульові шарніри (21, 22), із плечовими важелями (23, 24) плечового м'язового двигуна, які пружними кріпленнями (28, 25, 26) скріплені відповідно із плечима, між собою та із плечовою опорою (7), яка рухливим кульовим шарніром (6) з'єднана з опорою тулуба (1), до якої через осі (5) прикріплені стегнові важелі (3), які по кінематичному ланцюгу прямо з'єднані через кульові шарніри (34, 35), проміжні тяги (36, 37), кульові шарніри (38, 39), важелі крил (40, 41) із площинами махальних крил (42, 43), на яких закріплені поворотні лонжерони (44) із закріпленими на них асиметрично відносно їх осей перовидними площинами (45), які виконані з можливістю формування змінних аеродинамічних профілів крил при різноманітних змінних режимах їх махових рухів.
2. М'язовий орнітоптер-планер за п. 1, який відрізняється тим, що до опори тулуба (1) м’язового двигуна прикріплена утворена зі стрижнів (8, 9, 10, 12) рама, до передньої частини якої прикріплений кульовий шарнір (11), до якого прикріплене крило дельтаплана (53) і трапеція керування (54).
3. М'язовий орнітоптер-планер за пп. 1, 2, який відрізняється тим, що до опори тулуба (1) м'язового двигуна прикріплена утворена із стрижнів (8, 9, 10, 12) рама, до верхньої задньої частини якої нахилені відносно обрію осі (55, 56) передньої пари махальних крил, які одним кінцем прикріплені за допомогою нерухомих задніх кульових шарнірів (57, 58), за якими позаду ці осі (55, 56) мають продовження у вигляді кронштейнів (101, 102), між якими натягнута струна (103), а для її противаги струна (104) натягнута між передньою частиною осей (55, 56), між рухливими передніми кульовими шарнірами (71, 72), а до верху заднього кута рами нахилені відносно обрію осі (59, 60) задньої пари махальних крил, які одним кінцем прикріплені за допомогою нерухомих передніх кульових шарнірів (61, 62), за якими спереду ці осі (59, 60) мають кронштейни (105, 106), між якими натягнута струна (107), а для її противаги струна (108) натягнута між задньою частиною осей (59, 60), між задніми рухливими кульовими шарнірами (77, 78), з якими по кінематичному ланцюгу з'єднані проміжні тяги (75, 76), кульові шарніри (73, 74), важелі (65, 66), які прикріплені до рами рухливими кульовими шарнірами (63, 64), а в протилежному кінці з'єднані через кульові шарніри (67, 68) із проміжними тягами (69, 70), з'єднані верхніми кінцями з передніми кульовими шарнірами (71, 72) осей передньої пари махальних крил, а нижніми кінцями з'єднані з кульовими шарнірами (21, 22), прикріпленими до плечових важелів (23, 24), які пружними кріпленнями (28, 25, 26) скріплені відповідно із плечима, між собою та із плечовою опорою (7), яка рухливим кульовим шарніром (6) з'єднана з опорою тулуба (1), до якої через осі (5) прикріплені стегнові важелі (3), які по кінематичному ланцюгу через кульові шарніри (34, 35), проміжні тяги (79, 80), проміжні шарніри (81, 82, 91, 92), проміжні тяги (83, 84, 93, 94), кульові шарніри (85, 86, 95, 96), важелі передніх і задніх пар крил (87, 88, 97, 98) з'єднані із площинами передніх і задніх крил (89, 90, 99, 100), на яких закріплені поворотні лонжерони (44) із закріпленими на них асиметрично відносно їх осей перовидними площинами (45), які виконані з можливістю формування змінних аеродинамічних профілів махальних крил при різноманітно змінних режимах їх махальних рухів.
4. М'язовий орнітоптер-планер за пп. 1 - 3, який відрізняється тим, що змонтовані в площинах крил (42, 43, 89, 90, 99, 100) поворотні пружні лонжерони (44), до кінців яких прикріплені кривошипи (46), які разом кінематично з'єднані паралельними шатунами (47, 48, 49), а до шатуна (48) жорстко прикріплений рухливий упор (50), що упертий наприкінці руху шатуна (48) у нерухомий упор (51), що прикріплений до конструкції площин крил (42, 43, 89, 90, 99, 100), до якої також прикріплений один кінець пружини (52), яка іншим кінцем прикріплена до шатуна (48) і виконана з можливістю, своїм зусиллям, повертання поворотних лонжеронів (44) і пружних перовидних площин (45) у вихідне зімкнуте положення, у якому ці площини (45), маючи звуження в кінцевій частині крила, виконані з можливістю утворення аеродинамічного профілю, який має проміжки змінної ширини між суміжними перовидними площинами (45), а в середній частині, виконані з можливістю утворення загального аеродинамічного профілю, що у період руху крила вверх-назад після розвороту перовидних площин (45) виконаний з можливістю перетворення в крило, утворене з їх ряду.
Текст
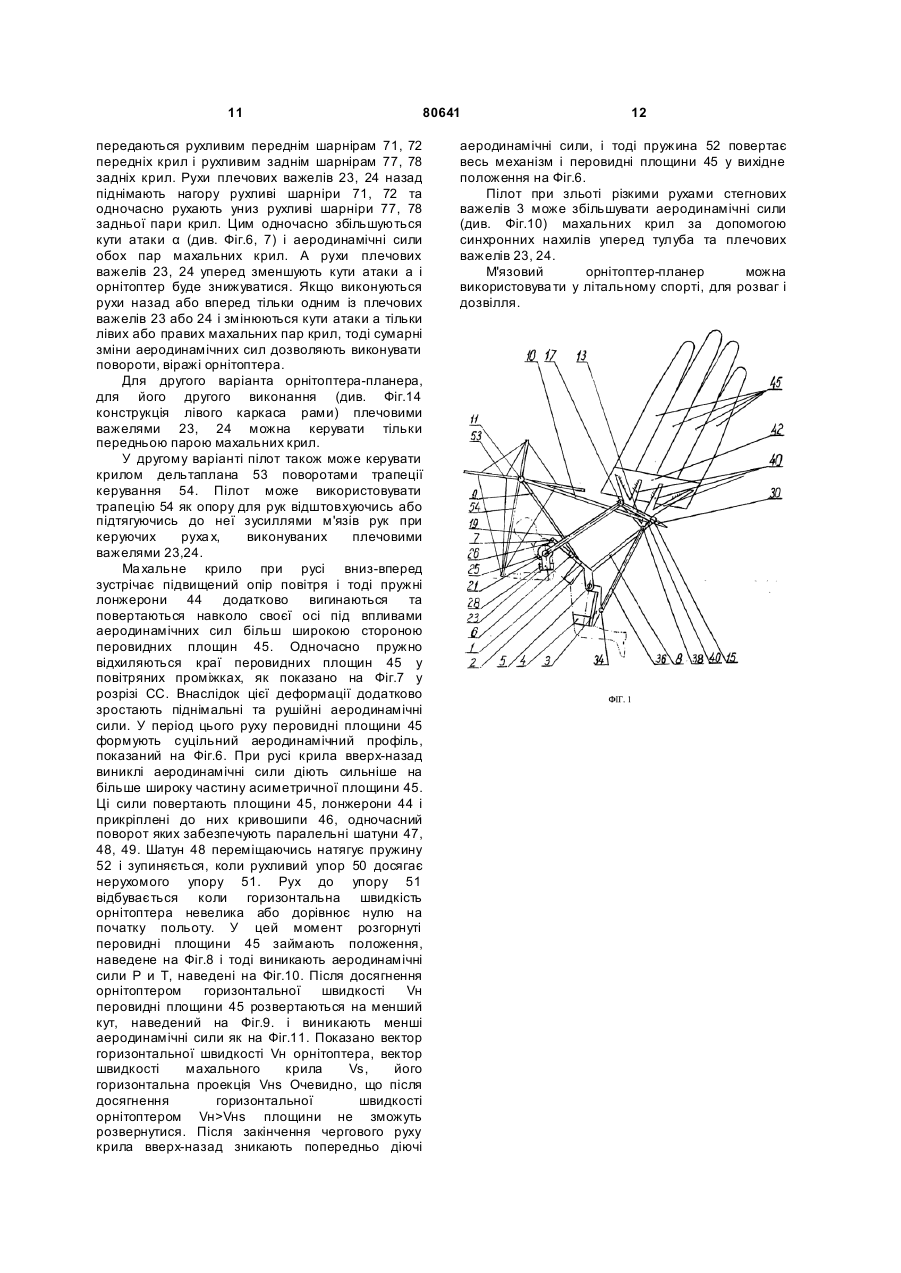
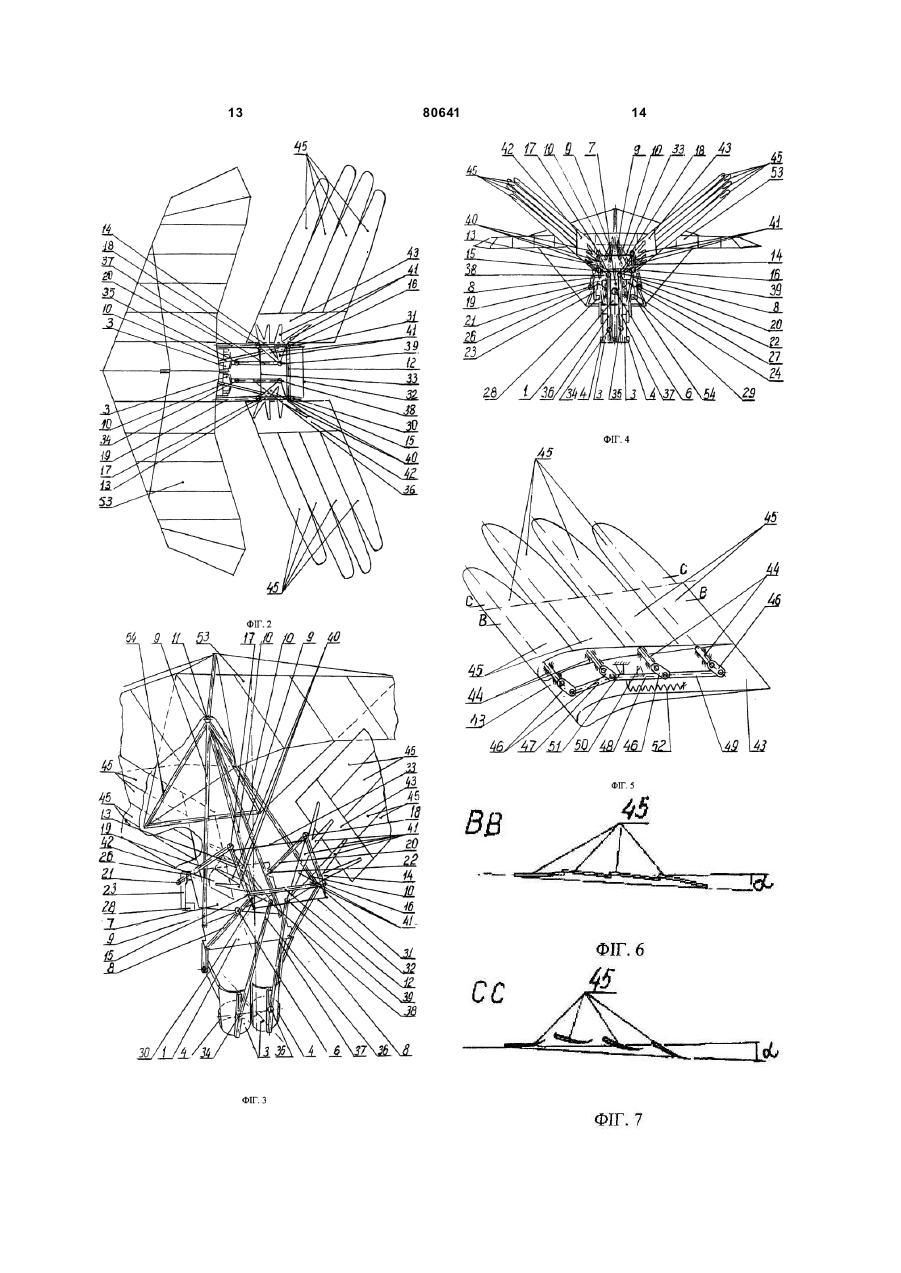
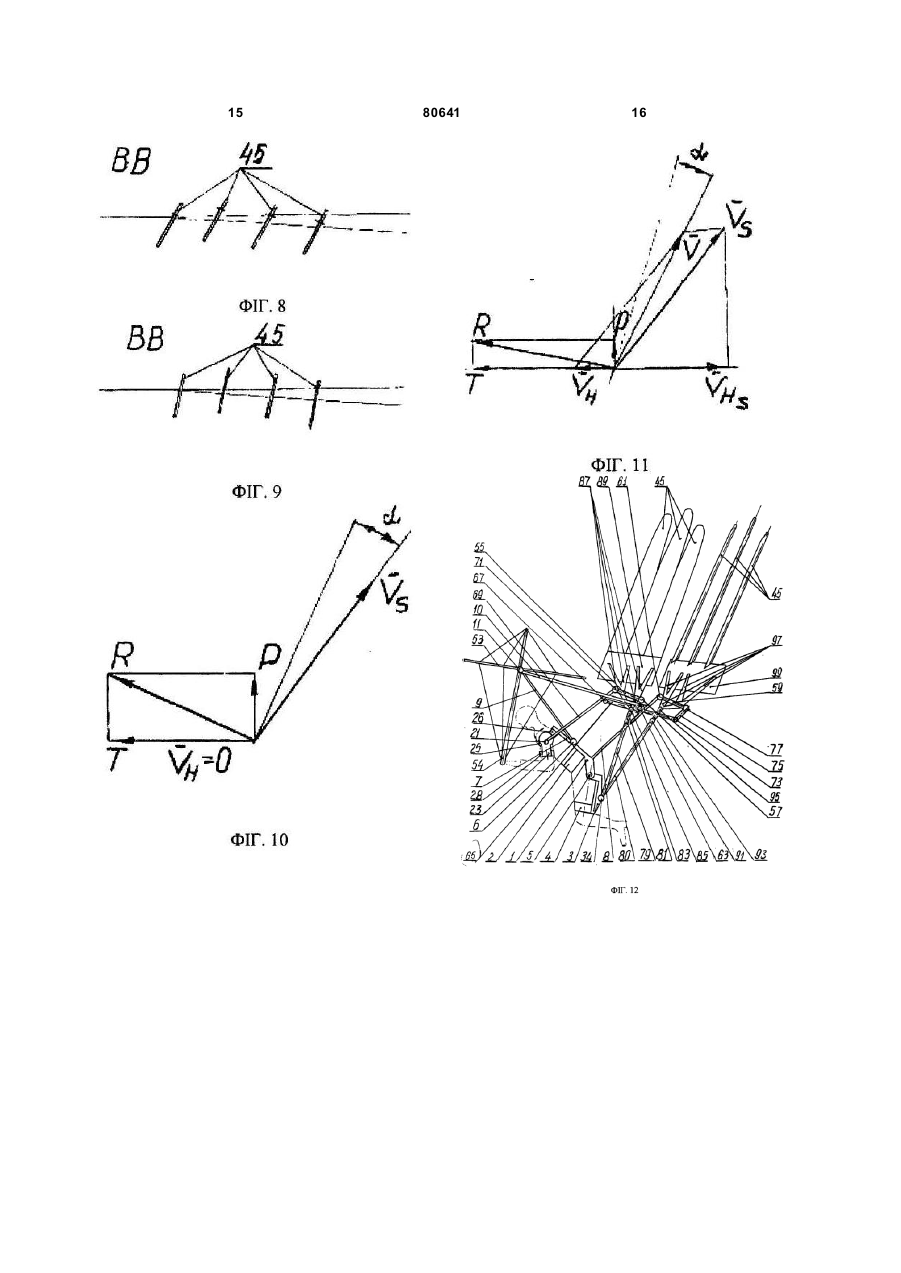
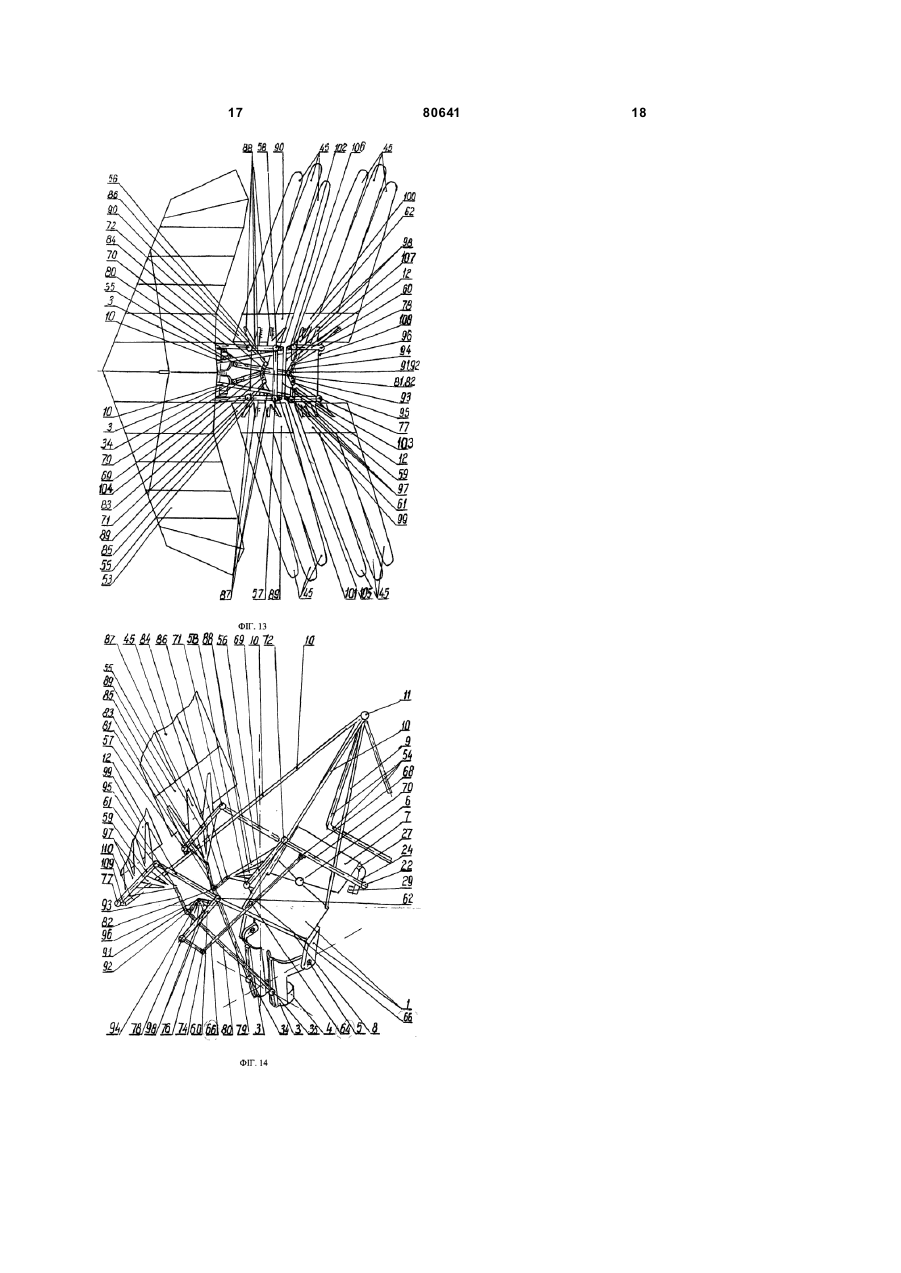
1. М'язовий орнітоптер-планер, що має м'язовий двигун, кінематично зв'язані з ним одну або дві пари махальних крил, який відрізняється тим, що до опори тулуба (1) м'язового двигуна прикріплена утворена зі стрижнів (8, 9, 10, 12) рама, до верхніх задніх кутів якої нахилені відносно обрію осі (13, 14) махальних крил, які одним кінцем прикріплені за допомогою нерухомих кульових шарнірів (15, 16), за якими ці осі (13, 14) мають продовження у вигляді кронштейнів (30, 31), між якими натягнута стр уна (32), а для її противаги струна (33) натягнута між передньою частиною осей (13, 14), між рухливими передніми кульовими шарнірами (17, 18), які по кінематичному ланцюгу керування з'єднані через проміжні тяги (19, 20), кульові шарніри (21, 22), із плечовими важелями (23, 24) плечового м'язового двигуна, які пружними кріпленнями (28, 25, 26) скріплені відповідно із плечима, між собою та із плечовою опорою (7), яка рухливим кульовим шарніром (6) з'єднана з опорою тулуба (1), до якої через осі (5) прикріплені стегнові важелі (3), які по кінематичному ланцюгу прямо з'єднані через кульові шарніри (34, 35), проміжні тяги (36, 37), кульові шарніри (38, 39), важелі крил (40, 41) із площинами махальних крил (42, 43), на яких закріплені поворотні лонжерони (44) із закріпленими на них асиметрично відносно їх осей перовидними площинами (45), які виконані з можливістю формування змінних аеродинамічних профілів крил при різноманітних змінних режимах їх махових рухів. 2. М'язовий орнітоптер-планер за п. 1, який відрізняє ться тим, що до опори тулуба (1) м’язового двигуна прикріплена утворена зі стрижнів (8, 9, 10, 12) рама, до передньої частини 2 (19) 1 3 80641 4 площинами (45), які виконані з можливістю формування змінних аеродинамічних профілів махальних крил при різноманітно змінних режимах їх махальних рухів. 4. М'язовий орнітоптер-планер за пп. 1 - 3, який відрізняє ться тим, що змонтовані в площинах крил (42, 43, 89, 90, 99, 100) поворотні пружні лонжерони (44), до кінців яких прикріплені кривошипи (46), які разом кінематично з'єднані паралельними шатунами (47, 48, 49), а до шатуна (48) жорстко прикріплений рухливий упор (50), що упертий наприкінці руху шатуна (48) у нерухомий упор (51), що прикріплений до конструкції площин крил (42, 43, 89, 90, 99, 100), до якої також прикріплений один кінець пружини (52), яка іншим кінцем прикріплена до шатуна (48) і виконана з можливістю, своїм зусиллям, повертання поворотних лонжеронів (44) і пружних перовидних площин (45) у вихідне зімкнуте положення, у якому ці площини (45), маючи звуження в кінцевій частині крила, виконані з можливістю утворення аеродинамічного профілю, який має проміжки змінної ширини між суміжними перовидними площинами (45), а в середній частині, виконані з можливістю утворення загального аеродинамічного профілю, що у період руху крила вверх-назад після розвороту перовидних площин (45) виконаний з можливістю перетворення в крило, утворене з їх ряду. Винахід належить до повітряної техніки, що використовує м'язову силу. Відомий планер-орнітоптер, що має дві пари махальних крил, тяги, шнури, що з'єднують між собою лонжерони, стремена [патент СРСР №1205]. Відомий літальний пристрій з м'язовим двигуном, що має два махальних крила, дві різних варіанти стійок, і важелів із пружними елементами [заявка Німеччини DE 19509774]. Відомий орнітоптер-планер БІЧ 18, що має дві пари махальних крил, тяги, кабіну пілота з корпусом, привод крил, педалі, тяги [М.К. Тихонов «Політ птахів і машин із махальними крилами» М. 1949, 168с]. Відомий моторний махоциклет, що містить махальні крила, які мають поворотні перовидні лопатки, повороти лонжеронів яких під потрібним кутом автоматично керує механізм [а.с. СРСР №187533]. Відомий літальний пристрій, що містить два махальні крила з осями крил, нахиленими щодо обрію, а крила мають першу частину суцільну площину та другу частину крила, утворену з лопаток - клапанів, змонтованих на поворотних лонжеронах [патент Франції №2171946]. Недоліком крил цих літальних апаратів є те, що недосконалі їх аеродинамічні профілі, рухи лонжеронів і тому крила в період підйому-змаху вверх створюють негативну піднімальну аеродинамічну силу, спрямовану вниз, тому ці апарати не можуть летіти з малими швидкостями. Ціллю даного винаходу є підвищення можливостей людини-пілота, найбільш ефективно використовува ти всі найбільш потужні групи м'я зів: стегон, тулуба, плечей, рук 5 які дозволили б йому летіти поперемінно махаючим або плануючим польотом, плавно знижуватися легко маневрувати та керувати під час польоту, використовуючи ефективні рухові та керуючі механізми. Зазначена ціль досягається тим, що застосовують два м'язових двигуни: стегновий м'язовий двигун і плечовий м'я зовий двигун за винаходом [автора даного винаходу Р. Дайніса а.с. СРСР №945491 і за його винаходом за міжнародною публікацією WO 03/035186]. Винахід м'язового орнітоптера-планера призначено для створення можливостей людині-пілотові, використовуючи тільки свою м'язову силу злетіти із землі, летіти в режимі махального або плануючого польоту, вільно маневрувати, робити різні віражі, плавно або круто знижуватися вниз, зменшуючи швидкість польоту, практично зменшуючи її до нуля в момент приземлення. Такі можливості польоту та планування можуть бути створені використовуючи як перший, так і другий варіант компонування орнітоптера-планера, що відрізняються істотною новизною, яка полягає в тому, що застосовано стегновий і плечовий двигуни, а з ними сполучені, скріплені основні частини тіла людини: тулуб, стегна, плечі, руки утворюють інтегровані, цільні рухові-керуючі механізми. За першим варіантом орнітоптерпланер скомпонований з однієї пари махальних крил та крила дельтаплана. В другому варіанті він скомпонований із двох пар махальних крил і крила дельтаплану. Крило дельтаплану в цьому винаході використається як добре освоєний літальний апарат, хоча замість нього може бути ефективніше використана будь-яка конструкція, що має значно більш досконалі параметри аеродинамічних профілів. Істотн у новизну містить використання стегнового двигуна в махальному механізмі. До опори тулуба стегнового двигуна прикріплена рама, до якої прикріплені кінцеві шарніри відносно обрію нахилених осей крил. Передні рухливі кульові шарніри осей махальних крил через проміжні тяги, проміжні кульові шарніри з'єднані з важелями плечей, скріпленими кріпленнями між собою, із плечима та з опорою плечей, яка рухливим кульовим шарніром з'єднана з опорою тулуба. Кінематичний ланцюг махального механізму утворюють прикріплені до опори тулуба стегнові важелі, які через проміжні шарніри, проміжні тяги та важелі крил з'єднані із махальними крилами. Істотн у новизну містять махальні крила, що мають площини крил з поворотними пружними лонжеронами, до яких асиметрично відносно їх осей прикріплені пружні перовидні площини, що мають до кінців звуження та утворюють наприкінці крила аеродинамічний профіль із проміжками між суміжними перовидними площинами, а в середини 5 80641 крила утворюють суцільний аеродинамічний профіль при плануванні або в період руху махального крила униз. Такий профіль створює збільшені піднімальні та рушійні аеродинамічні сили, які утворюються через поздовжні та поворотні деформації пружних лонжеронів і через поворотні деформації кінцевих країв перовидних площин, що викликаються сильними повітряними вихрами та потоками, які утворюються в проміжках між перовидними площинами. Така конструкція махального крила у період його руху ввер х-назад змушує перовидні площини повернутися та перетворитися несуцільним крилом, утвореним з ряду перовидних площин, що повернулися, які створюють піднімальні та рухові аеродинамічні сили. Ефективна робота махальних крил важлива спочатку польоту орнітоптера та може дозволити пілотові злетіти майже вертикально або махаючи крильми ненадовго «повисіти» на одній висоті. Перший варіант орнітоптера - планера забезпечує істотно нові можливості виконувати такі керуючо-кермові рухи. Безпосередній кінематичний зв'язок між важелями стегна та махальними крильми дозволяє пілотові фіксувати одне крило або обидва крила в позиціях під різними кутами за допомогою фіксації стегна у відповідному положенні, або рухаючи стегнами нерівномірно з різними швидкостями, або відстаючи рухами стегон за фазами махального циклу, коли будь-яка зміна кутів нахилу махальних крил змінює рівновагу їх аеродинамічних сил і дозволяє пілоту робити повороти лише нерівномірними рухами стегон. Дуже різноманітні, істотно нові керуючокермові рухи можна виконувати використовуючи плечовий м'язовий двигун, нахиляючи верхню частину тулуба вперед, назад, повертаючи плечі навколо осі хребта в протилежні сторони або роблячи руху у тому ж самому напрямку, р ухаючи тільки плечі. Всі ці керуючі рухи від плечових важелів через прямий кінематичний ланцюг, через проміжні тяги та шарніри передаються рухливим переднім шарнірам осей махальних крил. Поворотом плечових важелів назад, повертаються крила назад, збільшується кут атаки, крила піднімаються вверх та навпаки, повертаючи плечові важелі вперед - аеродинамічні сили крил зменшуються, крила знижуються. Повертаючи одне плече вперед або назад, або повертаючи плечі в протилежні напрямки, крила рухаються в протилежні напрямки і тоді виконуються повороти кінцевої частини орнітоптера - віражі. Всі ці керуючі і кермові рухи підйому, зниження, віражів можуть синхронно, узгоджено виконуватися у поєднанні з керуючо-кермовими рухами стегон. Більше того, всі перераховані керуючі рухи махальних крил можуть бути виконані спільно, узгоджено з різноманітними керуючими рухами крила дельтаплана та можуть бути виконані в періоди зльоту, активного махального або планувального польоту або при посадці. Тому така велика різноманітність можливостей керуючих рухів і тим більше їх поєднань дозволяє пілотові виконувати аналогічні керуючі рухи, які роблять деякі птахи. Знижуючись вертикально в режимі 6 «парашутування» можна знижуватися в будьякому напрямку або з поворотами навколо вертикальної осі. За другим варіантом орнітоптер-планер, що відрізняється істотною новизною, може бути змонтований із крила дельтаплана та двох, передньої і задньої пар махальних крил. І в цьому варіанті стегновий двигун використовується для виконання рушійно-махальних рухів. У цьому випадку до рами, прикріпленої до опори тулуба нерухомо прикріплюються кінцеві кульові шарніри осей передньої пари махальних крил і передні кульові шарніри осей задньої пари махальних крил. Новизна в цьому випадку полягає в тому, що безпосереднім кінематичним ланцюгом з'єднується лівий стегновий важіль із передньою парою махальних крил, а правий стегновий важіль - із задньою парою махальних крил. Кінематичні ланцюги керування містять проміжні тяги, важелі та шарніри, що з'єднують плечові важелі з рухливими кульовими шарнірами осей передньої пари крил і через додаткові важелі та шарніри - із задніми рухливими кульовими шарнірами задньої пари махальних крил. Рушійні змахи обома парами крил пілот може здійснювати рухаючи стегна разом, виконуючи ці рухи обома парами крил назад-вверх і вниз-вперед. Але істотна відмінність цього варіанта в тім, що пілот може в той самий час руха ти стегнами в протилежних напрямках, подібно тому, як це робить людина, що біжить по землі. Істотна новизна цього варіанта в тім, що махальні крила передньої та задньої пар рухаються в протилежних напрямках, одні нагору, інші вниз і тому створюють більш рівномірні аеродинамічні сили. У цьому варіанті керуючі рухи виконуються фіксацією махальних крил у різних положеннях, внаслідок чого виникають різні аеродинамічні сили. Керуючо-кермові рухи за допомогою плечового м'язового двигуна виконуються точно також як і у першому варіанті орнітоптера-планера за допомогою дуже різноманітних переміщень плечових важелів і за допомогою відповідних змін кутів атаки махальних крил. Істотно нова відмінність і нові можливості в цьому випадку виникають при режимі зниженняпарашутування, коли при цьому використовуються тільки крило дельтаплана та задня пара махальних крил. У цьому випадку виникає можливість регулювати або зменшувати швидкість зниження виконуючи повільні змахи передньою парою махальних крил. У другому варіанті є більш сприятливі можливості виконати вертикальний зліт або зависати довше на одній висоті виконуючи рухи стегнами в протилежних напрямках у режимі «бігу», тому що в цей час «вирівнюються» аеродинамічні сили обох пар махальних крил. Суть винаходу пояснюються кресленнями, де: Фіг.1 зображений вид збоку першого варіанту м'язового орнітоптера-планера, що має одну пару махальних крил і крило дельтаплана; Фіг.2 зображений той же Фіг.1. перший варіант вид зверху; Фіг.3 зображений вид центральної частини першого варіанту в аксонометрії; 7 80641 Фіг.4 зображений той же Фіг.1 перший варіант вид ззаду; Фіг.5 зображена частина махального крила; Фіг.6 зображений розріз ВВ махального крила з Фіг.5; Фіг.7 зображений розріз СС махального крила з Фіг.5; Фіг.8 зображений розріз ВВ із Фіг.5 з розвернутими перовидними площинами, коли горизонтальна швидкість польоту Vн дорівнює нулю; Фіг.9 зображений розріз ВВ із Фіг.5 з розвернутими перовидними площинами, коли горизонтальна швидкість польоту є Vн; Фіг.10 зображені аеродинамічні сили та швидкості перовидних площин які рухають вверхназад на Фіг.8 зображеному випадку, коли швидкість польоту дорівнює нулю; Фіг.11 зображені аеродинамічні сили та швидкості руху перовидних площин вверх-назад на Фіг.9 зображеному випадку; Фіг.12 зображений вид збоку другого варіанту м'язового орнітоптера-планера, що має дві пари махальних крил і крило дельтаплана, а перовидні площини задньоїпари крил зображені розвернутими як на Фіг.8 і Фіг.9; Фіг.13 зображений той же Фіг.12 другий варіант вид зверху; Фіг.14 зображений той же Фіг.12 другий варіант вид центральної частини в аксонометрії, а ліва частина рами зображена для варіанта з нерухомим заднім шарніром осі задньої пари махального крила. М'язовий орнітоптер-планер зa першим варіантом, що має стегновий і плечовий двигуни [за а.с. СРСР №945491 і за винаходом міжнародної публікації WO 03/035186], що мають опору тулуба 1, кріплення тулуба 2, два стегнових важелі 3 із кріпленнями стегна 4 і дві осі 5, що з'єднують опору тулуба 1 зі стегновими важелями 3. Опора тулуба 1 рухливим кульовим або карданним шарніром 6 спереду з'єднана з опорою плечей 7. До країв опори тулуба 1 прикріплені правий і лівий каркас рами, утвореної з пар стрижнів 8, 9, 10. Поперед пари стрижнів 9 та 10 зведені, скріплені між собою і до них прикріплений кульовий або карданний шарнір 11. Утворені з пар стрижнів 8 та 10 кінцеві кути рами скріплені між собою стрижнем 12. До задніх кутів рами ліва 13 і права 14 осі крил закріплені нерухомими лівим 15 і правим 16 кульовими шарнірами. Осі крил 13, 14 нахилені відносно обрію і цей кут нахилу можна легко змінювати різноманітними керуючими рухами. Лівий 17 і правий 18 рухливі кульові шарніри осей 13, 14 через проміжні праву 19 і ліву 20 тяги з'єднані з лівим 21 і правим 22 плечовими кульовими шарнірами, які скріплені відповідно з лівим 23 і правим 24 плечовими важелями. Важелі 23, 24 спереду скріплені пружним кріпленням 25 між собою, з боку спини лівим 26 і правим 27 кріпленнями скріплені із плечовою опорою 7, а лівим 28 і правим 29 кріпленнями плеча прикріплені до плечей. Осі 13, 14 мають жорстко до них прикріплені лівий 30 і правий 31 кронштейни, що являють собою продовження осей 8 13 і 14 далі за нерухомими кульовими шарнірами 15, 16. Кінці кронштейнів 30, 31 з'єднані між собою сильно натягнутою струною 32, для якої, як протидіюча натягнута струна 33 між рухливими кульовими шарнірами 17, 18. Протидія між струнами 32, 33 забезпечує та гарантує стабільність підтримання відстані між рухливими шарнірами 17, 18 при виконанні плечовими важелями 23, 24 всіх керуючих р ухів махальними крилами. До стегнових важелів 3 прикріплені відповідно лівий 34 і правий 35 кульові шарніри, які через ліву 36 і праву 37 проміжні тяги з'єднані з лівим 38 і правим 39 кульовими шарнірами, прикріпленими до лівого 40 і до правого 41 важелів крил, які жорстко скріплені з осями крил 13, 14. Важелі крил 40, 41 жорстко скріплені відповідно з лівою 42 і правою 43 площинами махальних крил. Усередині площин крил 42, 43 на Фіг.5 показаному варіанті змонтовані чотири поворотні, пружні лонжерони 44, до зовнішніх кінців яких асиметрично відносно їх осей прикріплені пружні перовидні площини 45, що мають аеродинамічні профілі. Поворотні осі лонжеронів змонтовані так, що в середній частині крила, у розрізі ВВ (Фіг.6) перовидні площини 45 замикаються між собою і формують загальний аеродинамічний профіль крила, а в кінцевій частині, у розрізі СС вони формують аналогічний аеродинамічний профіль, що має проміжки, що звужуються між суміжними перовидними площинами 45. Усередині площин крил 42, 43 змонтований механізм рівномірного . розвороту лонжеронів. Він складається зі змонтованих на лонжеронах 44 кривошипів 46, об'єднаних парами між собою паралельними шатунами 47, 48, 49. До шатуна 48 прикріплений рухливий упор 50 обмежить розворот лонжеронів 44 упираючись у нерухомий упор 51, закріплений до конструкції площин крил 42, 43. До цієї ж конструкції прикріплений кінець пружини 52, а її інший кінець прикріплений до шатуна 48. Пружина 52 повертає шатуни 47, 48, 49, лонжерони 44 у вихідне положення і тим самим повертає перовидні площини 45 у ви хідне зімкнуте положення. Як за першим, так і за другим варіантом орнітоптера-планера, що має одну або дві пари махальних крил, поперед рами, до кульового шарніра 11 прикріплене крило дельтаплана 53 із трапецією керування 54. М'язовий орнітоптер-планер за другим варіантом скомпонований із крила дельтаплана та двох пар махальних крил, що має стегнові і плечові двигуни [за винаходами а.с. СРСР №945491 і за WO 03/035186], містить опору тулуба 1, кріплення тулуба 2, два стегнових важелі 3 із кріпленнями стегон 4 і дві осі 5, що з'єднують опору тулуба 1 зі стегновими важелями 3. Опора тулуба 1 кульовим шарніром 6 спереду з'єднана з опорою плечей 7. До країв опори тулуба 1 прикріплений каркас рами, утворений з пар стрижнів 8, 9, 10. Поперед пари стрижнів 9 та 10 зведені, скріплені між собою і до них прикріплений кульовий шарнір 11. Кінцеві кути рами зі стрижнів 8 та 10 утворені із продовженням стрижнів 8, 9 80641 скріплених межу собою стрижнем 12. До кінців стрижнів 10 ліва 55 і права 56 осі передньої пари махальних крил закріплені нерухомими задніми лівим 57 і правим 58 кульовими шарнірами. До продовжень стрижнів 8 ліва 59 і права 60 осі задньої пари махальних крил, закріплені нерухомо передніми лівим 61 і правим 62 кульовими шарнірами. До стрижнів 10 рухливо прикріплені лівий 63 і правий 64 кульові шарніри, з якими скріплені лівий 65 і правий 66 важелі, до передніх кінців яких прикріплені лівий 67 і правий 68 кульові шарніри, скріплені кожен відповідно з лівою 69 і правою 70 проміжними тягами, які вгорі скріплені з лівим 71 і правим 72 рухливими кульовими шарнірами осей 55, 56 передньої пари крил. Нижні кінці тяг 69, 70 скріплені з кульовими шарнірами 21, 22, прикріпленими до лівого 23 і до правого 24 плечових важелів, які спереду пружним кріпленням 25 скріплені між собою, з боку спини кріпленнями 27, 28 скріплені із плечовою опорою 7 і кріпленнями передпліч 28, 29 скріплені із плечима. Важелі 65, 66 у кінцевій частині скріплені з лівим 73 і правим 74 кульовими шарнірами, з'єднаними через проміжні тяги 75 та 76 з лівим 77 і правим 78 задніми рухливими кульовими шарнірами осей 59, 60 задньої пари махальних крил. Стегнові важелі 3 через лівий 34 і правий 35 кульові шарніри з'єднані з лівою 79 і правою 80 тягами. Ліва тяга 79 через проміжні шарніри 81 та 82 з'єднані з лівою 83 і правою 84 проміжними тягами, які через кульові шарніри 85, 86 з'єднані з лівим 87 і правим 88 важелями передньої пари крил, скріпленими жорстко з осями 55, 56 передньої пари крил. Важелі крил 87, 88 жорстко скріплені з лівою 89 і правою 90 площинами передньої пари махальних крил, у яких аналогічно як і у першому варіанті орнітоптера-планера змонтовані пружні поворотні лонжерони 44 з перовидними площинами 45 та аналогічний механізм рівномірного розвороту лонжеронів. Права тяга 80 через проміжні шарніри 91, 92 з'єднана з лівою 93 і правою 94 проміжними тягами, які через кульові шарніри 95, 96 з'єднані з лівим 97 і правим 98 важелями задньої пари махальних крил, які жорстко скріплені з лівою 99 і правою 100 площинами задньої пари крил, що мають як і у передній парі крил змонтовані лонжерони 44, перовидні площини 45, механізм рівномірного розвороту лонжеронів. Ліва та права осі 55,56 передньої пари крил мають свої продовження, лівий і правий кронштейни 101, 102, кінці яких з'єднані натягнутою стр уною 103, а їй протидіюча струна 104 натягнута між передніми рухливими кульовими шарнірами 71, 72. Аналогічно осі 59. 60 задньої пари крил мають лівий і правий кронштейни 105,106, кінці яких з'єднані натягнутою струною 107, а їй протидіюча струна 108 натягнута між задніми шарнірами 77, 78 осей 59, 60 задньої пари крил. Для другого варіанта орнітоптера-планера при варіанті виконання з нерухомою віссю 59 задній шарнір 77 жорстко прикріплений до стрижня 109, що жорстко скріплений із продовженням 110 стрижня 10. При першому варіанті виконання орнітоптерапланера пілот виконує рухові махальні рухи 10 рівномірно та одночасно рухаючи і стегнові важелі 3, а керуючо-кермові рухи виконує р ухаючи плечові важелі 23, 24. Пілот може виконувати керуючо-кермові рухи рухаючи нерівномірно стегна, сповільнюючи або зупиняючи одне зі стегон. У цьому випадку різні нахили крил змінює їх сумарну аеродинамічну силу убік менш нахиленого крила. Рух стегнови х важелів 3 через кульові шарніри 34, 35, проміжні тяги 36, 37, кульові шарніри 38, 39, важелі крил 40, 41 передаються площинам крил 42, 43. При згинанні стегон крила піднімаються вверх-назад, при випрямленні - опускаються вниз-вперед. Керуючо-кермові рухи махальних крил пілот може виконувати рухаючи плечі, згинаючи або повертаючи верхню частину тулуба або всі ці рухи виконуючи сумісно. Всі ці рухи від плечових важелів 23, 24 через шарніри 21, 22, проміжні тяги 19, 20, рухливі шарніри 17, 18, осі крил 13, 14, важелі крил 40, 41 передаються площинам крил 42, 43. Плечові важелі 23, 24 можна рухати вперед та назад разом або в протилежні напрямки, одне вперед, інше назад, або можна рухати тільки один з них, зафіксувавши інший. Рухи плечових важелів 23, 24 назад збільшують кут атаки крила а (див. Фіг.6, 7) і збільшена аеродинамічна сила піднімає крило нагору, а рухи важелів 23, 24 уперед зменшують кут а таки крила а, зменшують аеродинамічну силу крила і орнітоптер знижується. Різноманітні керуючі рухи пілот може виконувати застосовуючи трапецію керування 54 дельтаплана, змінюючи кути нахилу крила дельтаплана 53. Всі різноманітні рухи керування, застосовувані пілотами дельтапланів можуть широко застосовуватися і при керуванні мускульним орнітоптером. У другому варіанті орнітоптера-планера рухи лівого стегновоговажеля 3 через шарнір 34, проміжну тягу 79, проміжні шарніри 81, 82, проміжні тяги 83, 84 кульові шарніри 85, 86, важелі передніх крил 87, 88 передаються площинам крил 89, 90. Аналогічно рухи правого стегнового важеля 3 через шарнір 35, проміжну тягу 80, проміжні шарніри 91, 92, проміжні тяги 93, 94, кульові шарніри 95, 96, важелі задніх крил 97, 98 передаються площинам задніх крил 99, 100. При згинанні обох стегон обидві пари крил піднімаються вверх-назад, а при випрямленні стегон - знижуються вниз-вперед. Керуючі рухи пілот може виконувати тільки стегнами, фіксуючи стегна та крила під різними кутами або ж рухаючи стегнами та крильми нерівномірно з відставаннями кутів або швидкостей махальних крил. У другому варіанті орнітоптера-планера керуючо-кермові рухи пілота від плечових важелів 23, 24 через шарніри 21,22, проміжні тяги 69, 70, рухливі шарніри 71,72, осі крил 55, 56 передаються площинам передньої пари крил 89, 90, а через проміжні тяги 69, 70, кульові шарніри 67, 68, важелі 65, 66, кульові шарніри 73, 74, проміжні тяги 75, 76, задні рухливі шарніри 77, 78, осі задніх крил 59, 60 передаються площинам задньої пари крил 99, 100. Різноманітні рухи плечей і плечових важелів 23, 24 прямо 11 80641 передаються рухливим переднім шарнірам 71, 72 передніх крил і рухливим заднім шарнірам 77, 78 задніх крил. Рухи плечових важелів 23, 24 назад піднімають нагору рухливі шарніри 71, 72 та одночасно рухають униз рухливі шарніри 77, 78 задньої пари крил. Цим одночасно збільшуються кути атаки α (див. Фіг.6, 7) і аеродинамічні сили обох пар махальних крил. А рухи плечових важелів 23, 24 уперед зменшують кути атаки а і орнітоптер буде знижуватися. Якщо виконуються рухи назад або вперед тільки одним із плечових важелів 23 або 24 і змінюються кути атаки а тільки лівих або правих махальних пар крил, тоді сумарні зміни аеродинамічних сил дозволяють виконувати повороти, віражі орнітоптера. Для другого варіанта орнітоптера-планера, для його другого виконання (див. Фіг.14 конструкція лівого каркаса рами) плечовими важелями 23, 24 можна керувати тільки передньою парою махальних крил. У другому варіанті пілот також може керувати крилом дельтаплана 53 поворотами трапеції керування 54. Пілот може використовувати трапецію 54 як опору для рук відштовхуючись або підтягуючись до неї зусиллями м'язів рук при керуючих руха х, виконуваних плечовими важелями 23,24. Ма хальне крило при русі вниз-вперед зустрічає підвищений опір повітря і тоді пружні лонжерони 44 додатково вигинаються та повертаються навколо своєї осі під впливами аеродинамічних сил більш широкою стороною перовидних площин 45. Одночасно пружно відхиляються краї перовидних площин 45 у повітряних проміжках, як показано на Фіг.7 у розрізі СС. Внаслідок цієї деформації додатково зростають піднімальні та рушійні аеродинамічні сили. У період цього руху перовидні площини 45 формують суцільний аеродинамічний профіль, показаний на Фіг.6. При русі крила вверх-назад виниклі аеродинамічні сили діють сильніше на більше широку частину асиметричної площини 45. Ці сили повертають площини 45, лонжерони 44 і прикріплені до них кривошипи 46, одночасний поворот яких забезпечують паралельні шатуни 47, 48, 49. Шатун 48 переміщаючись натягує пружину 52 і зупиняється, коли рухливий упор 50 досягає нерухомого упору 51. Рух до упору 51 відбувається коли горизонтальна швидкість орнітоптера невелика або дорівнює нулю на початку польоту. У цей момент розгорнуті перовидні площини 45 займають положення, наведене на Фіг.8 і тоді виникають аеродинамічні сили Ρ и Т, наведені на Фіг.10. Після досягнення орнітоптером горизонтальної швидкості Vн перовидні площини 45 розвертаються на менший кут, наведений на Фіг.9. і виникають менші аеродинамічні сили як на Фіг.11. Показано вектор горизонтальної швидкості Vн орнітоптера, вектор швидкості махального крила Vs, його горизонтальна проекція Vнs Очевидно, що після досягнення горизонтальної швидкості орнітоптером Vн>Vнs площини не зможуть розвернутися. Після закінчення чергового руху крила вверх-назад зникають попередньо діючі 12 аеродинамічні сили, і тоді пружина 52 повертає весь механізм і перовидні площини 45 у вихідне положення на Фіг.6. Пілот при зльоті різкими рухами стегнових важелів 3 може збільшувати аеродинамічні сили (див. Фіг.10) махальних крил за допомогою синхронних нахилів уперед тулуба та плечових важелів 23, 24. М'язовий орнітоптер-планер можна використовува ти у літальному спорті, для розваг і дозвілля. 13 80641 14 15 80641 16 17 80641 18
ДивитисяДодаткова інформація
Назва патенту англійськоюMan-powered ornithopter-sailplane
Автори англійськоюDAINYS, Remigijus
Назва патенту російськоюМускульный орнитоптер-планер
Автори російськоюДайнис Ремигиюс
МПК / Мітки
МПК: B64C 33/00
Мітки: орнітоптер-планер, м'язовий
Код посилання
<a href="https://ua.patents.su/9-80641-myazovijj-ornitopter-planer.html" target="_blank" rel="follow" title="База патентів України">М’язовий орнітоптер-планер</a>
Підводний планер

Номер патенту: 42202
Опубліковано: 15.10.2001
Автори: Коробов Віталій Ілліч, Бабенко Віктор Віталійович, Мороз Володимир Василійович, Майстер Валентин Іванович, Поліщук Сергій Володимирович
Формула / Реферат:
Підводний планер, який містить корпус з регульованою несучою поверхнею, який відрізняється тим, що остання, з можливістю її повороту на 360°, встановлена на нерухомих частинах несучої поверхні з обох сторін корпусу підводного планера, а складений плавцевий рушій містить стаціонарну та рухомі частини з висувними пластинами, кожна з яких з’єднана з сердечниками соленоїдів.
Орнітоптер
Номер патенту: 26735
Опубліковано: 12.11.1999
Автори: П'ятишев Олексій Робертович, П'ятишев Роберт Олександрович
МПК: B64C 33/00
Мітки: орнітоптер
Формула / Реферат:
Орнитоптер, содержащий крыло, включающее центральную и машущие секции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата машущих секций в горизонтальное положение, при этом центральная секция отделена от корпуса и связана с машущими секциями плечом, обспечивающим равновесие сил подъема на центральной и машущих секциях в горизонтальном положении, отличающийся тем, что...
Підводний планер

Номер патенту: 28282
Опубліковано: 16.10.2000
Автори: Коробов Віталій Ілліч, Бабенко Віктор Вітальович, Поліщук Сергій Володимирович
МПК: B63B 3/13
Формула / Реферат:
Подводный планер, содержащий корпус аппарата и крылья, отличающийся тем, что последние имеют в своем теле бобины с гибким пленочным материалом, представляющим собой дополнительные поверхности крыльев, закрепленных на общем фигурным рычаге, проходящем через прорези, расположенные с боковых поверхностей корпуса планера перпендикулярно его продольной оси, и имеющем пальцы, входящие в отверстия направляющих и соединенные с бобышками, которые...
Вітровий агрегат розбірний малогабаритний “варм”

Номер патенту: 1330
Опубліковано: 15.08.2002
Автор: Мельничук Святослав Сафронович
Мітки: варм, агрегат, малогабаритний, вітровій, розбірний
Формула / Реферат:
Вітровий агрегат розбірний малогабаритний, що містить вал, крила та механізм передачі обертів на генератор, який відрізняється тим, що на вилкоподібній конструкції закріплений вал, на який надіті колеса з можливістю обертання на своїх підшипниках разом з прикріпленими до них в чотирьох точках крилами, до рами яких прикріплене полотно, а в середній частині рами крила з’єднані через підшипник з валом з можливістю обертання разом з колесами, до...
Лапа культиватора
Номер патенту: 24403
Опубліковано: 25.06.2007
Автори: Сальніков Віктор Павлович, Тарасенко Володимир Іванович, Бабицький Леонід Федорович
МПК: A01B 33/00
Мітки: культиватора, лапа
Формула / Реферат:
1. Лапа культиватора, що містить носок, два симетрично розташовані крила з лезами і хвостовик, яка відрізняється тим, що на верхній поверхні носка і крил лапи встановлені вершинами до носка лапи накладки трикутної форми, при цьому вісь центральної накладки збігається з віссю лапи, а осі накладок крил паралельні лініям їхніх лез.2. Лапа культиватора за п. 1, яка відрізняється тим, що вершини накладок крил розташовані на лініях їхніх...
Попередній патент: Електродвигун (варіанти)
Наступний патент: Іскробезпечний пристрій обліку електроенергії
Випадковий патент: Спосіб отримання епоксидних смол, що містять бром