Підводний планер
Номер патенту: 28282
Опубліковано: 16.10.2000
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Вітальович


Формула / Реферат
Подводный планер, содержащий корпус аппарата и крылья, отличающийся тем, что последние имеют в своем теле бобины с гибким пленочным материалом, представляющим собой дополнительные поверхности крыльев, закрепленных на общем фигурным рычаге, проходящем через прорези, расположенные с боковых поверхностей корпуса планера перпендикулярно его продольной оси, и имеющем пальцы, входящие в отверстия направляющих и соединенные с бобышками, которые жестко закреплены на одной нитке симметрично расположенных тросов, установленных на шкивах, один из которых соединен с осью электродвигателя вращательного движения.
Текст
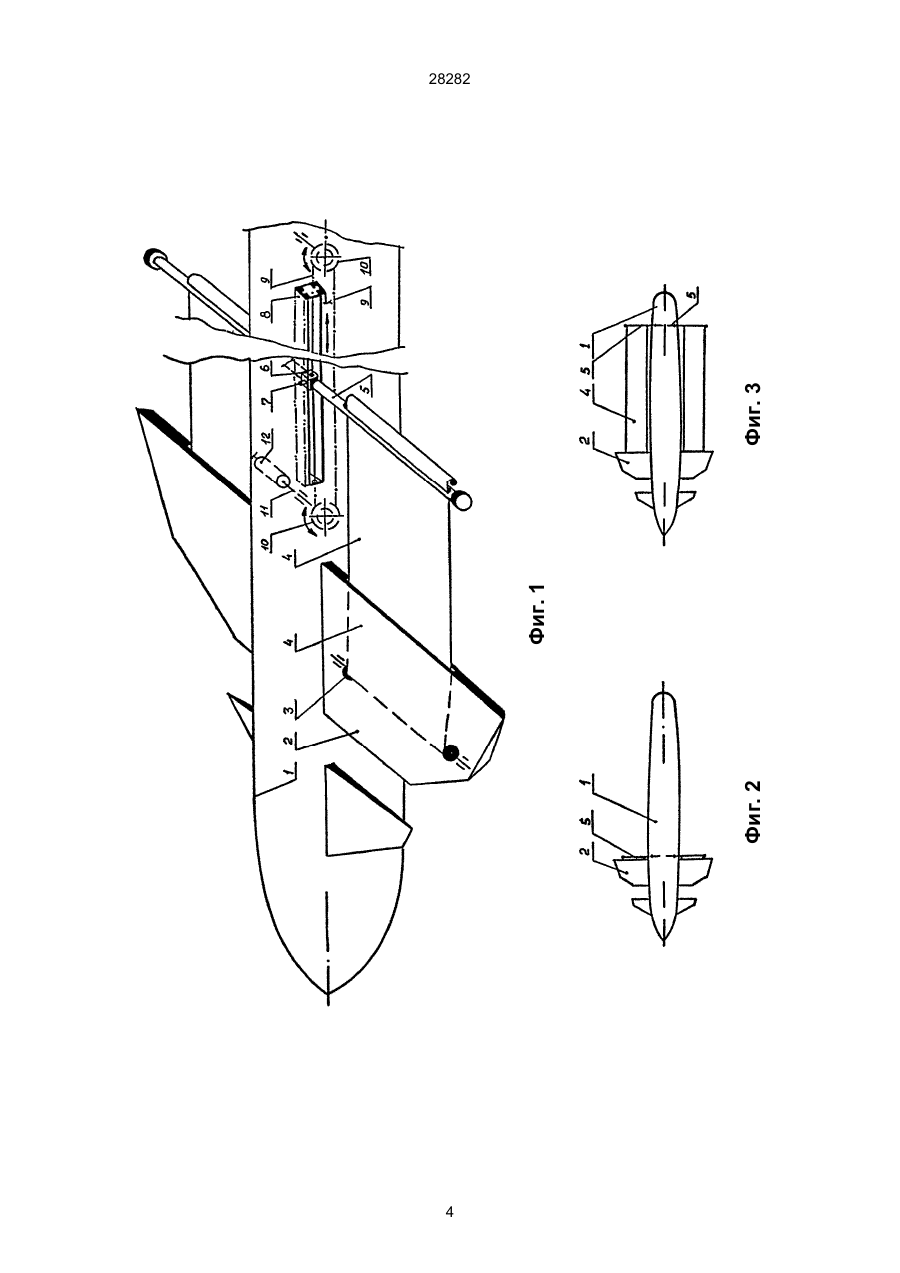
Подводный планер, содержащий корпус аппарата и крылья, отличающийся тем, что последние имеют в своем теле бобины с гибким пленоч 28282 в форме крыла, изготовленного из легкого каркаса, обтянутого прорезиненной материей. Наиболее близким по технической сущности к изобретению "Подводный планер" является конструкция, представленная в авторском свидетельстве СССР "Описание летательного аппарата с выдвижными несущими поверхностями" (№ 25049, МКИ В64С39/00, автор Юсичев Д.И., опубл. 31.01.1932), где каркас несущих поверхностей выполнен в виде двух рядов шарнирных звеньев, могущих поворачиваться вокруг своих осей в одном направлении. Крылья аэроплана образуются из двух цепей, наматываемых на барабаны и имеющих между звеньями прокладки, дающие возможность изгибаться только в одну сторону. При раскрытии крыльев (разматывании цепей) и включении мотора аэроплан поднимается в воздух. При необходимости опуститься под воду крылья сматываются, и все люки, кроме одного, закрываются. Вода входит в открытый люк и в уравнительные баки, служащие для уравновешивающего положения аппарата под водой. Происходит автоматическая замена пропеллера на винт, и при включении мотора аппарат перемещается под водой. Подъем осуществляется следующем образом: в нижний бак впускается сжатый воздух, и вода вытесняется из люка, после чего лодка поднимается на поверхность воды. Недостатками этой разработки являются невысокие мореходные качества, определяемые тем, что основное назначение конструкции состоит в ее летательных способностях. Наличие дополнительных узлов снижает надежность аппарата, а зависимость от постоянного источника энергоснабжения не позволяет выполнять длительные подобные операции. Задачей настоящего изобретения "Подводный планер" является улучшение мореходных качеств подводного управляемого аппарата, обеспечение автономности его работы. Поставленная задача реализуется за счет того, что подводный планер, содержащий корпус аппарата и крылья, имеет в своем теле бобины с гибким пленочным материалом, представляющим собой дополнительные поверхности крыльев, закрепленных на общем фигурном рычаге, проходящем через прореви, расположенные с боковых поверхностей корпуса планера перпендикулярно его продольной оси и имеющем пальцы, входящие в отверстия направляющих и соединенные с бобышками, которые жестко закреплены на одной нитке симметрично расположенных тросов, установленных на шкивах, один из которых соединен с осью электродвигателя вращательного движения. Сущность изобретения "Подводный планер" подтверждается фиг. 1-3, где на фиг. 1 показан общий вид конфигурации (вид сбоку), на фиг. 2 - подводный планер со втянутыми дополнительными поверхностями крыла (вид сверху), а на фиг. 3 подводный планер с выдвинутыми дополнительными поверхностями крыла (вид сверху). Подводный планер содержит корпус 1 с основными жесткими крыльями 2, в телах которых расположены бобины 3 с гибкими пленочными материалами, выполняющими роль дополнительных поверхностей 4 крыльев, закрепленных другой стороной на общем для обеих крыльев фигурном рычаге 5, проходящем через отверстие в корпусе аппарата перпендикулярно его продольной оси, с бобышками 6 и пальцами 7, входящими в отверстия направляющих 8 и жестко закрепленных на одной нитке тросов 9, установленных на шкивах 10, один из которых через ось 11 получает вращательное движение от электродвигателя 12. Шкивы с тросами расположены с бобышками, пальцами и направляющими с обеих боковых поверхностей подводного планера, имеющего отверстия для выхода фигурного рычага. Принцип действия конструкции "Подводный планер" основан на следующих положениях. В результате увеличения веса вышележащей жидкости давление увеличивается пропорционально глубине. Изменение давления Dр на единицу изменения глубины Dh определяется гидростатическим уравнением: Dр=-grDh, где g - ускорение силы тяжести, а r - плотность жидкой среды. Для океана плотность 99% объема лежит в пределах ±2% ее среднего значения, а изменения g еще меньше. График зависимости р=f(h) линеен. Для g=9,8 м/с, r=1,03×103 кг/м3, h=10 м, р=105 Н/м2 (Harvey John G. Atmosphere arid ocean. Our Fluid Envirornents. Great Britain, Wisbech, CambridgeShire. The Artemus Press Ltd, 1976). Плотность пресной воды возрастает с повышением температуры от 0°С до 4°С, достигая при этом температуры максимальной плотности. В интервале от 4°С до точки кипения плотность воды уменьшается. Вязкость уменьшается с увеличением температуры, но при низких температурах она уменьшается с увеличением давления. Оптимальность морской среды является функцией температуры и солености. Также как и воздействием давления на плотность этими факторами пренебрегают ввиду их незначительного влияния на плотность воды. Сформировавшаяся водная масса при движении из очага, формирования подвергается на своем пути трансформации под воздействием атмосферы и в результате перемешивания с другой водной массой, из-за чего ее первоначальные свойства изменяются. Например, водная масса Балтийского моря обладает низкой соленостью, что вызвано значительным превышением речного стока и количеством осадков над испарением. При нагревании она обладает низкой плотностью и, перетекая через проливы между Швецией и Данией, перемешивается с океаническими водными массами. До перемешивания ее соленость составляла 8%, а после - 20%. Концепция водных масс играет большую роль при описании процессов циркуляции в океанах. Однако для определения скоростное которой водные массы перемещаются, необходимо иметь такие данные, как скорость перемешивания и скорость неконсервативных свойств, определяемых химическими и биологическими процессами в океане. В настоящее время такие данные получать не удается. Поэтому для этой цели предполагается использование подводных управляемых аппаратов, движущихся за счет перемещения различных слоев водных масс. 2 28282 Согласно принципу Рогалло, летательные аппараты могут быть сконструированы из прямых балок и материи, натянутой на них (Ордози М. Дельтапланеризм. М., Машиностроение, 1984,168 с.). В конструкции "Подводный планер" также используется гибкое дополнительное крыло 4. Для его изготовления можно применять синтетические материалы типа дакрон, терилен, бейнбридж (dakron, terilen, bainbridge) и другие. В качестве троса 9 можно использовать трос диаметром 2,5 мм с разрывным усилием 4000 Н. При включении электродвигателя 12 из начального положения, показанного на фиг. 2, гибкое дополнительно крыло 4 полностью разворачивается до положения, порезанного на фиг. 3. Вращательное движение от электродвигателя 12 через ось 11 передается шкиву 10, который перемещает трос 9 и бобышку 6, играющую роль ползуна, с ее пальцами 7, двигающимися в пазах направляющей 8. Вместе с ней через отверстие в корпусе подводного планера перемещается рычаг 5, в прорезь которого проходит и фиксируется дополнительная поверхность 4 крыла 2. В зависимости от количества оборотов, выполненных электродвигателем 12, изменится длина пути, пройденного рычагом 5 и, в результате этого площадь несущей поверхности гибкого крыла 4. При наличии информации о скоростных характеристиках водной среды определяется оптимальная площадь дополнительной поверхности крыла. При отклонении электродвигателя 12 фигурный рычаг 5 фиксируется на заданном положении. Натяжение гибкого материала дополнительной поверхности крыла определяется с помощью пружины (на фиг. 1 не показана), закрепленной на оси бобины 3. Применение конструкции "Подводный планер" позволит расширить диапазон океанографических исследований, увеличить количество и достоверность океанографической, гидрометеорологической и гидрологической информации. Его конструктивное решение позволяет выполнять задание автономно на большой территории в течение продолжительного промежутка времени, определяемого только параметрами задания и прочностными характеристиками составных элементов. Подъем и маневрирование по траектории осуществляется подводным планером за счет использования сжатого воздуха, а также изменением угла атаки основных гибких крыльев. Течения в различных водоемах описываются приближенно, если наложить условие на начальную величину циркуляции, которое проверяется, решив полные уравнения для мелкой воды. Это течение описывается линеаризованными уравнениями, получающимися при отбрасывании инерционных слагаемых в уравнениях моментов (Бреббия К. и др. Методы граничных элементов. М., Мир, 1987, 524 с.: Connor, J.J., and Brebbia, С.A. Finite Element Technigues for Fluid Flow, Newnes Butterworths, London, 1976): -hrfq2+rgH (dh/dx1)+t1-t1B=0 hrfq1+rgH (dh/dx2)+t2S-t2B=0 и условием неразрывности трения: dq1/dx1+dq2/dx2=0 где f - параметр Кориолиса, q1 и q2 - проинтегрированные по вертикали компоненты скорости в направлении осей соответственно x1 и x2; r - плотность; g - ускорение силы тяжести; Н=h+h - полная глубина воды; h - глубина относительно среднего уровня воды; h - высота подъема свободной поверхности воды; tS - касательные напряжения, создаваемые ветром; tB - касательные напряжения, возникающие за счет трения о дно водоема. Исследования полностью погруженного в воду цилиндра, в результате которых определялись горизонтальные и вертикальные силы, действующие на цилиндр в зависимости от его радиуса и глубины до оси цилиндра представлены в работах: Naftrger R.A. arid Chakabart S.K. Scattering of waves by two-dimensional circular obstacles in finite water depths, J. Ship Res. 23, 32-42 (1979); Ogilfie Т.F. First and second-order forces on a cylinder submerged undeer a free surface, J. Fluid Mech., 16, 451-472 (1963). Примеры расчета аэродинамических характеристик планера даны в кн. Антонов O.K. Планеры. Самолеты. К., Наукова думка, 1990, 504 с., а дельтапланов - в кн.: Ордоди М. Дельтапланеризм. М., Машиностроение, 1984, 168 с. Источники информации 1. Антонов O.K. Планеры. Самолеты. К., Наукова думка, 1990, 504с. 2. Цихош А. Сверхзвуковые самолеты. М., Мир, 1983, 432 с. 3. Бреббия К. и др. Методы граничных элементов. М., Мир, 1987, 524 с. 4. Connor J.J. and Brebbia С.A. Finite element Techniques for Fluid Flow, Newnes Butter-worths, London, 1976. 5. Carrier, Rick. The complete Book of Sky Sailing. New York, Mс Graw-Hill Book Company, 1974. 6. Авторское свидетельство СССР № 25764 "Описание летательного аппарата с выдвижными несущими поверхностями", МКИ В64С39/00, опубл. 31.01.1932 г., автор Юсичев А.И. 3 Фиг. 2 Фиг. 1 Фиг. 3 28282 4 28282 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater glider
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliovych, Korobov Vitalii Illich
Назва патенту російськоюПодводный планер
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич, Коробов Виталий Ильич
МПК / Мітки
МПК: B63B 3/13
Код посилання
<a href="https://ua.patents.su/5-28282-pidvodnijj-planer.html" target="_blank" rel="follow" title="База патентів України">Підводний планер</a>
Підводний буксирований апаратурний носій

Номер патенту: 14168
Опубліковано: 25.04.1997
Автори: Іваненко Михайло Іванович, Ком'ягін Юрій Васильович, Старков Костянтин Олександрович, Блінков Віктор Олександрович, Гайскій Віталій Олександрович, Сафонов Георгій Олександрович
МПК: B63B 21/56
Мітки: носій, апаратурний, буксирований, підводний
Формула / Реферат:
1. Подводный буксируемый аппаратурный носитель, содержащий корпус с хвостовым оперением, выполненный в виде центрального и боковых цилиндров, жестко соединенных между собой при помощи основания обтекаемого профиля, на котором установлен кронштейн для крепления грузонесущего кабеля; выполненный в виде двух параллельных планок с отверстиями, при этом на внешней боковой поверхности каждого бокового цилиндра установлена пластина, на которой...
Складений плавцевий рушій
Номер патенту: 25356
Опубліковано: 30.10.1998
Автори: Поліщук Сергій Володимирович, Бабенко Віктор Вітальович, Коробов Віталій Ілліч
МПК: B63H 1/36
Мітки: рушій, складений, плавцевий
Формула / Реферат:
Составной плавниковый движитель, содержащий стебель со встроенным в нем электродвигателем и многосоставное крыло, отличающийся тем, что в передней части крыла расположены соленоиды с сердечником и перемычка, которая с помощью прорези соединена со средней частью крыла, которая в свою очередь содержит соленоиды с сердечником и перемычку, которая с помощью прорези соединена с задней частью крыла, а электродвигатель стебля своим валом жестко...
Крило літального апарату
Номер патенту: 18337
Опубліковано: 25.12.1997
Автори: Заболотний Ігор Георгійович, Чумаченко Ніколай Матвєєвіч
МПК: B64C 5/00
Мітки: крило, апарату, літального
Формула / Реферат:
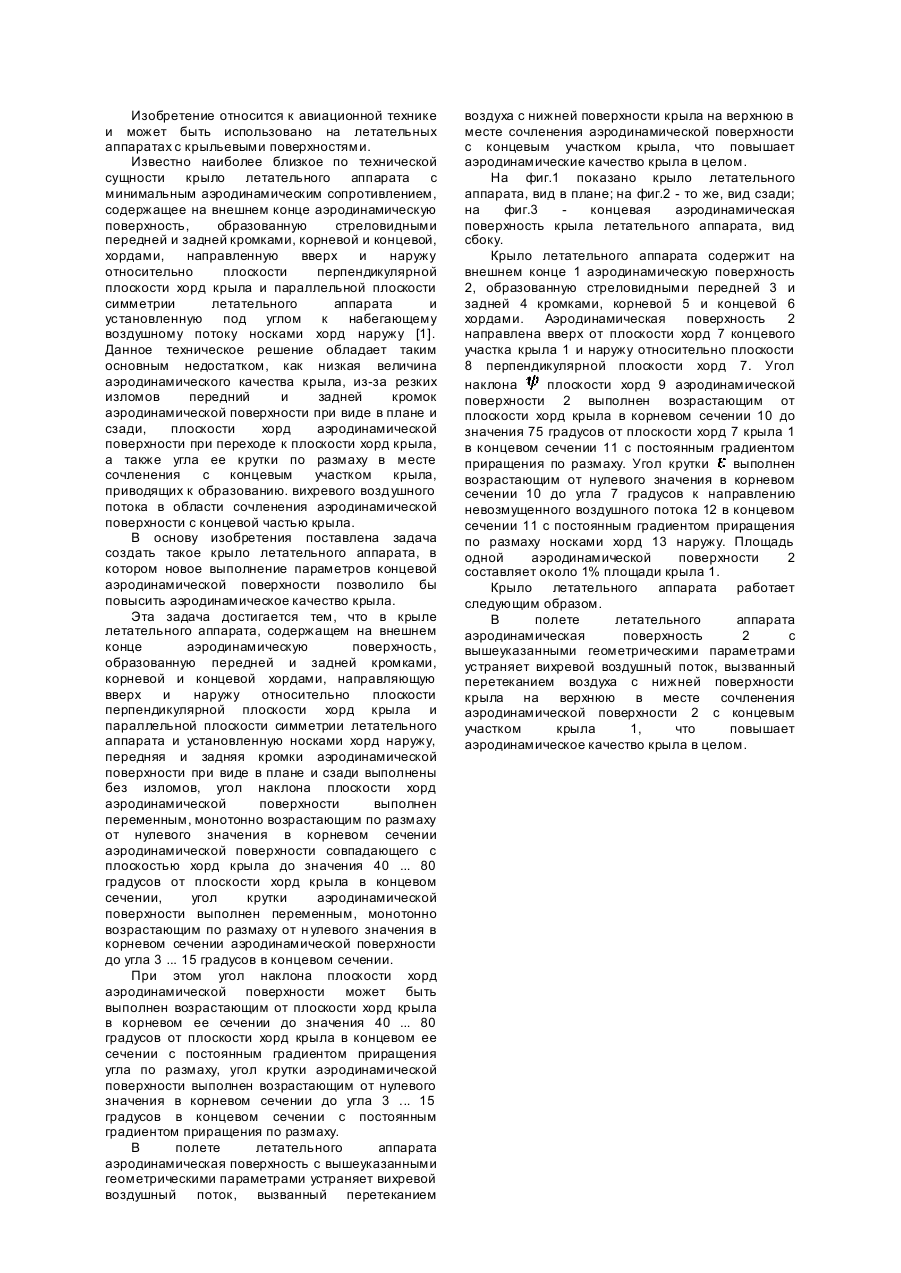
1. Крыло летательного аппарата, содержащее на внешнем конце аэродинамическую поверхность, образованную стреловидными передней и задней кромками, корневой и концевой хордами, направленную вверх и наружу относительно плоскости, перпендикулярной плоскости хорд крыла и параллельной плоскости симметрии летательного аппарата и установленную носками хорд наружу, отличающееся тем, что передняя и задняя кромка аэродинамической поверхности при виде в...
Плавцевий рушій апарата
Номер патенту: 25355
Опубліковано: 30.10.1998
Автори: Бабенко Віктор Вітальович, Коробов Віталій Ілліч, Поліщук Сергій Володимирович
МПК: B63H 1/36
Мітки: апарата, плавцевий, рушій
Формула / Реферат:
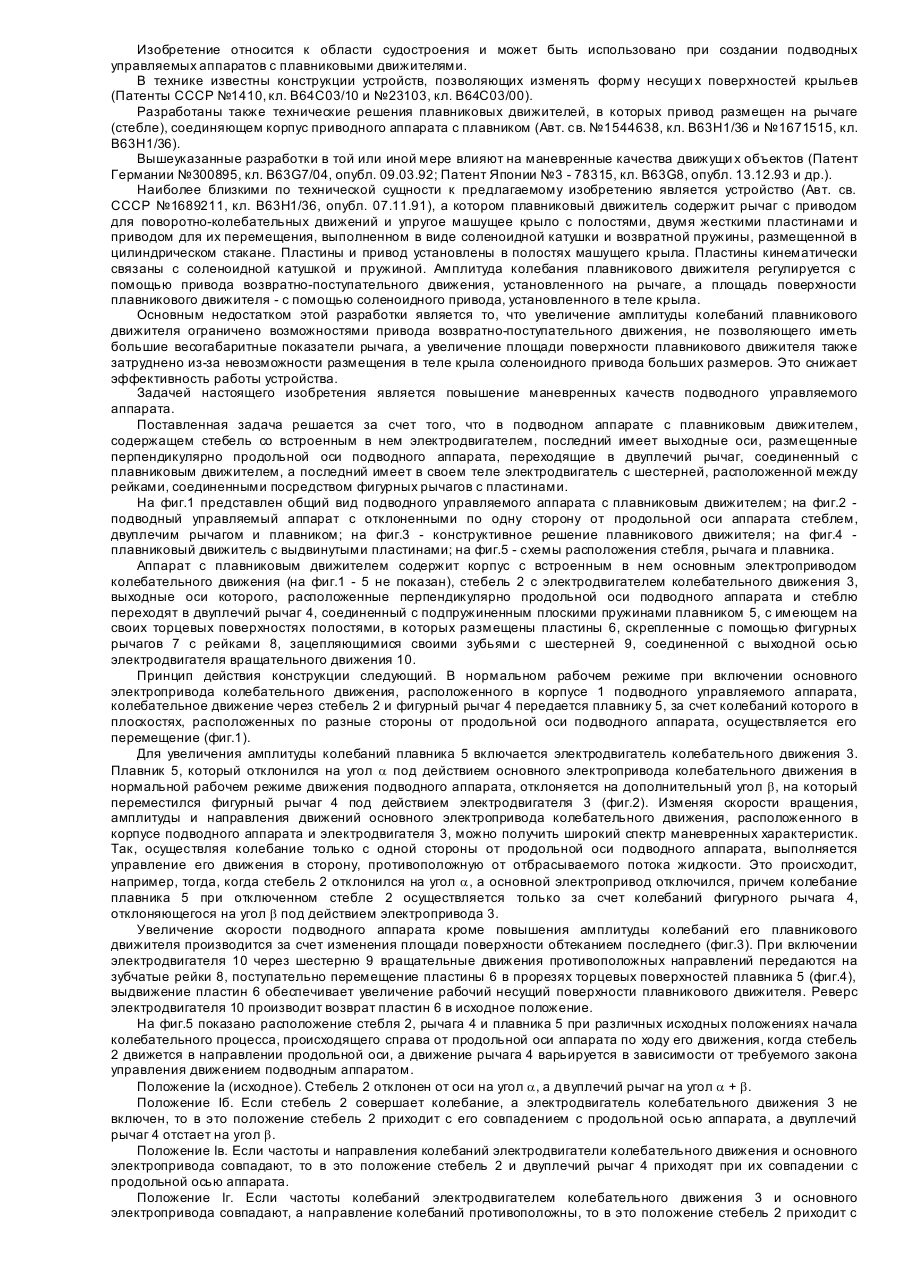
Плавниковый движитель аппарата, содержащий стебель со встроенным в нем электродвигателем, отличающийся тем, что последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами.
Плавцевий рушій
Номер патенту: 25621
Опубліковано: 30.10.1998
Автори: Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Бабенко Віктор Вітальович
МПК: B63H 1/36
Формула / Реферат:
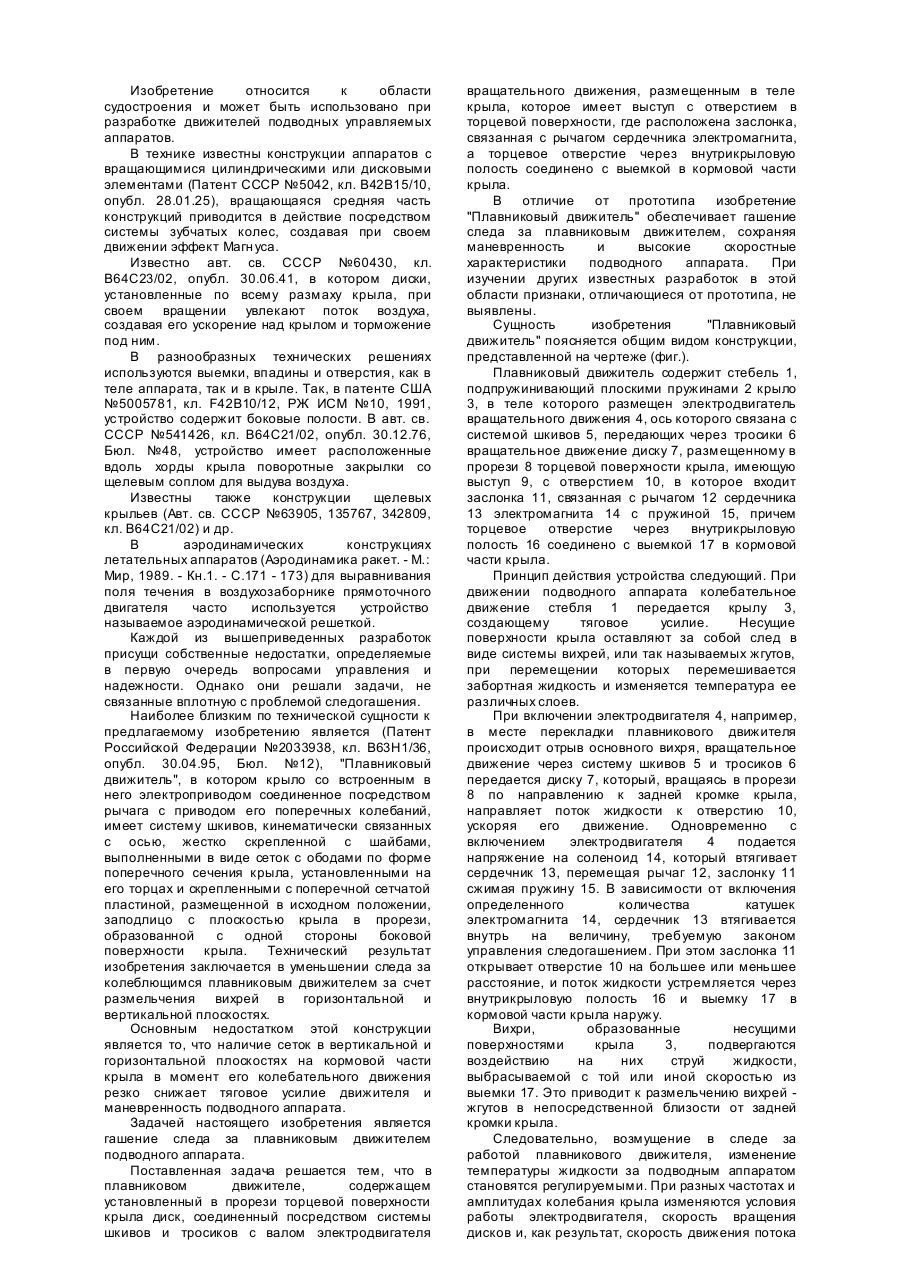
Плавниковый движитель, содержащий крыло со встроенным в нем электроприводом, отличающийся тем, что в прорези торцевой поверхности крыла установлен диск, связанный системой шкивов и тросиков с валом электродвигателя вращательного движения, а на торцевой поверхности крыла имеется выступ с отверстием, в котором расположена заслонка, связанная с рычагом сердечника электромагнита, причем отверстие через внутрикрыловую полость соединено с выемкой...
Попередній патент: Установка для наклеювання акцизних марок
Наступний патент: Природний лікувальний засіб
Випадковий патент: Швидкоморозильний флюїдизаційний апарат для заморожування дрібноштучних продуктів