Землерийно-транспортна машина безперервної дії
Номер патенту: 81650
Опубліковано: 10.07.2013
Автори: Голубченко Олександр Іванович, Хожило Максим Едуардович

Формула / Реферат
1. Землерийно-транспортна машина безперервної дії, яка містить базову машину, різально-метальний робочий орган, розвантажувальний транспортер з роликами, яка відрізняється тим, що розвантажувальний транспортер виконаний у вигляді дугоподібного стрічкового конвеєра з додатковими конусоподібними роликами, закріпленими на нерухомій осі, причому внутрішня сторона стрічки обладнана симетричними відносно поздовжньої осі напрямними.
2. Землерийно-транспортна машина безперервної дії за п. 1, яка відрізняється тим, що стрічковий конвеєр обладнаний механізмом пересування у вигляді приводу, вихідна шестерня якого зчеплена з дугоподібною зубчастою рейкою, закріпленою нерухомо на стрічковому конвеєрі.
3. Землерийно-транспортна машина безперервної дії за п. 1, 2, яка відрізняється тим, що співвідношення радіусів більшої R та меншої r основ конусоподібних роликів дорівнює співвідношенню максимальної Η та мінімальної h відстані площин ролика від осі симетрії конвеєра , а саме R/r=H/h.
Текст
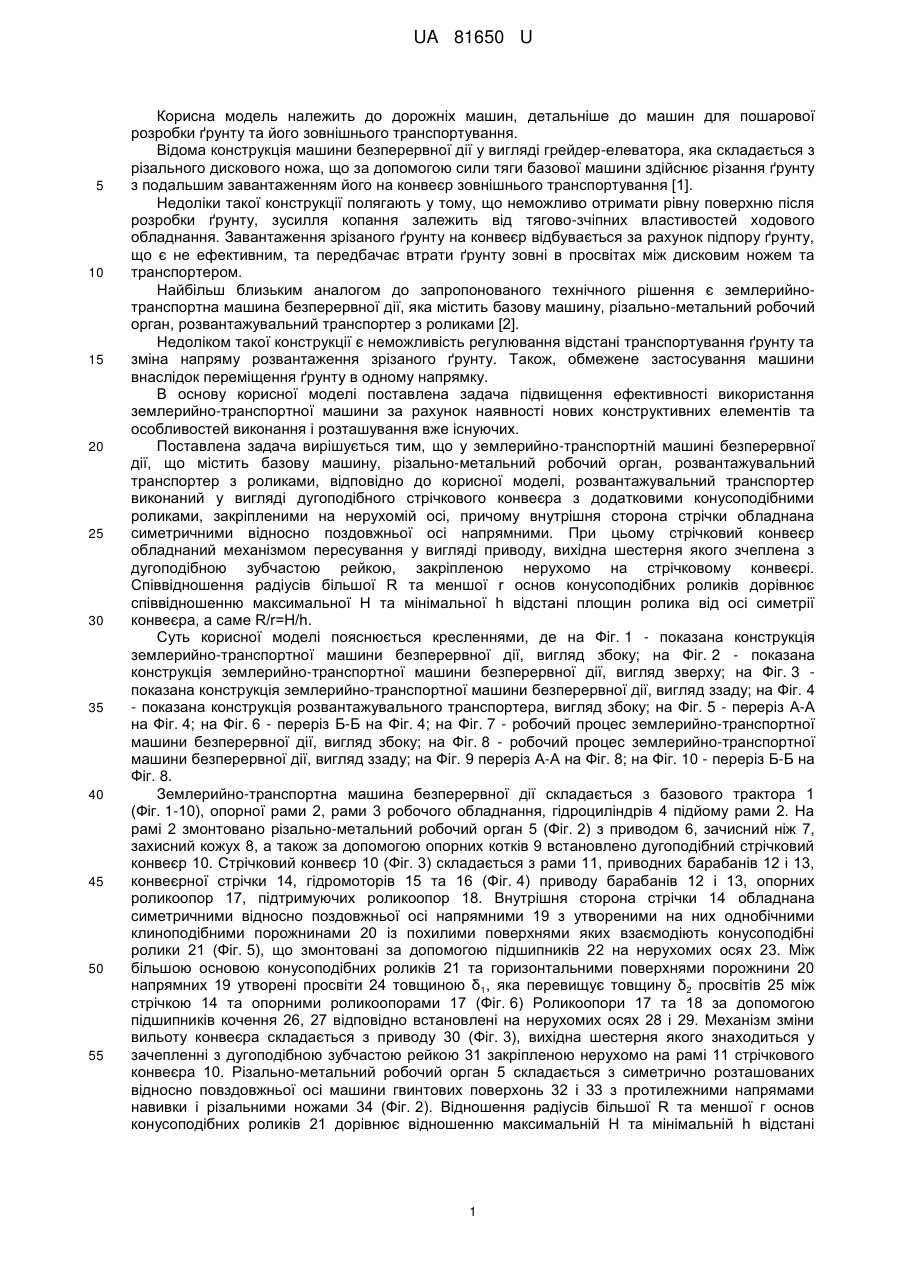
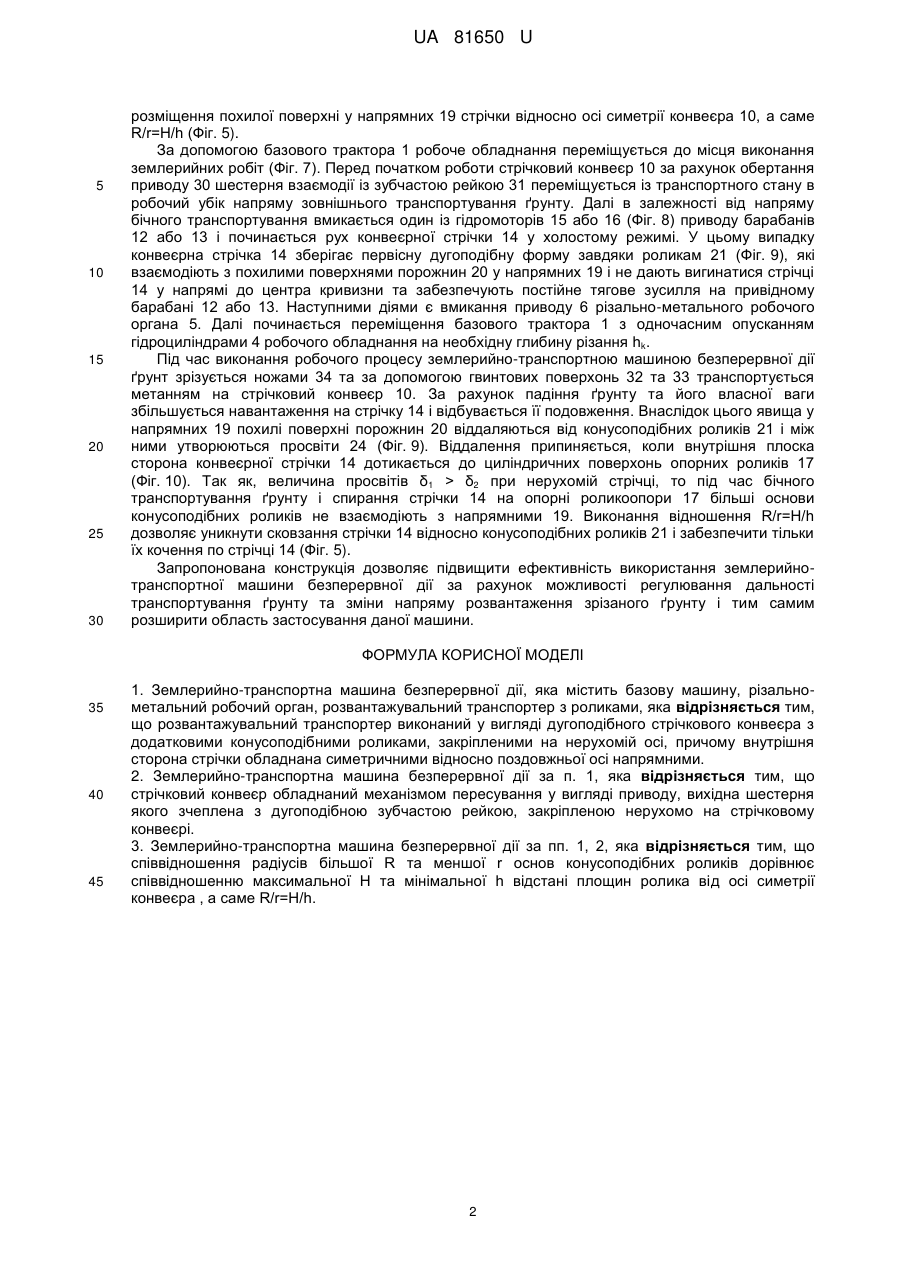
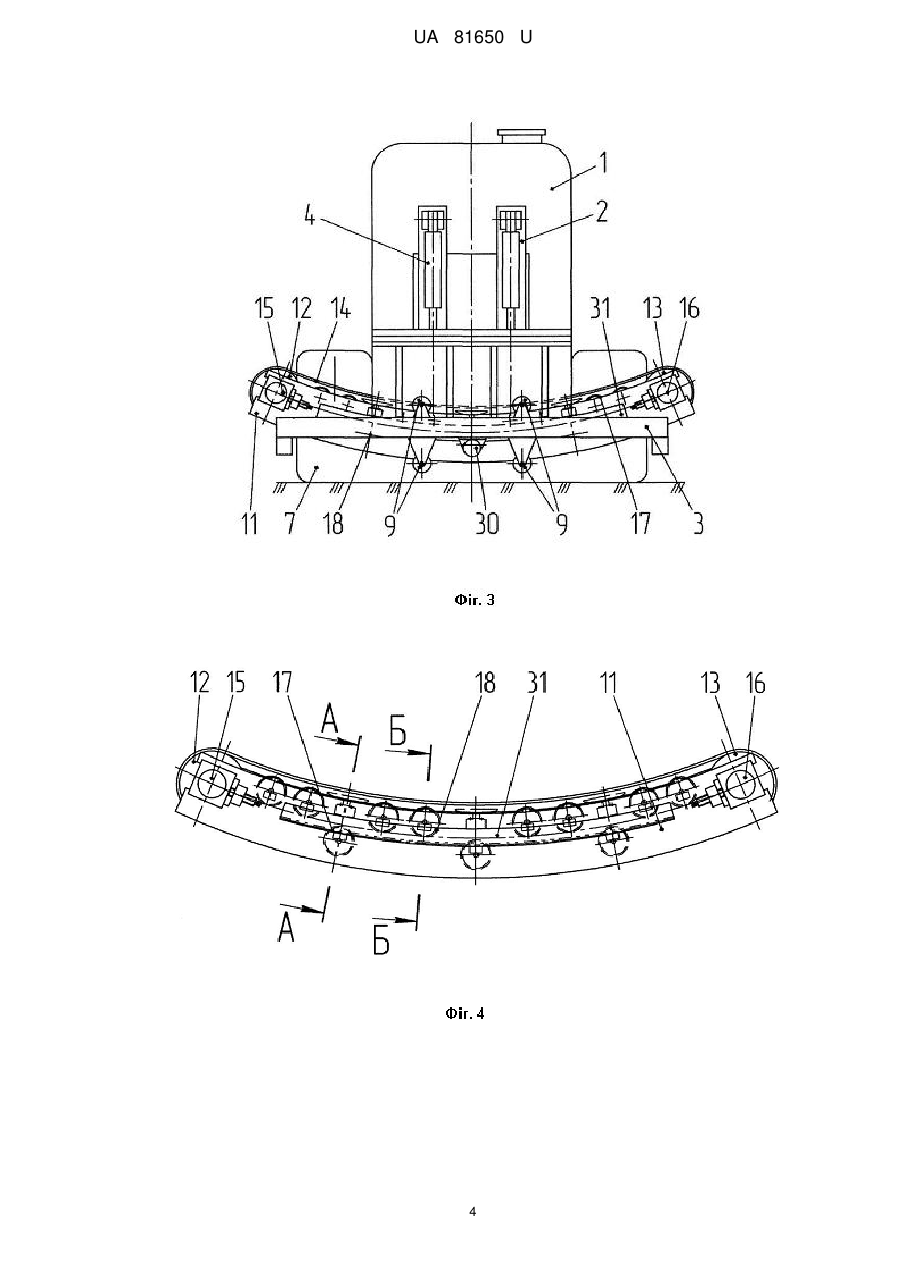
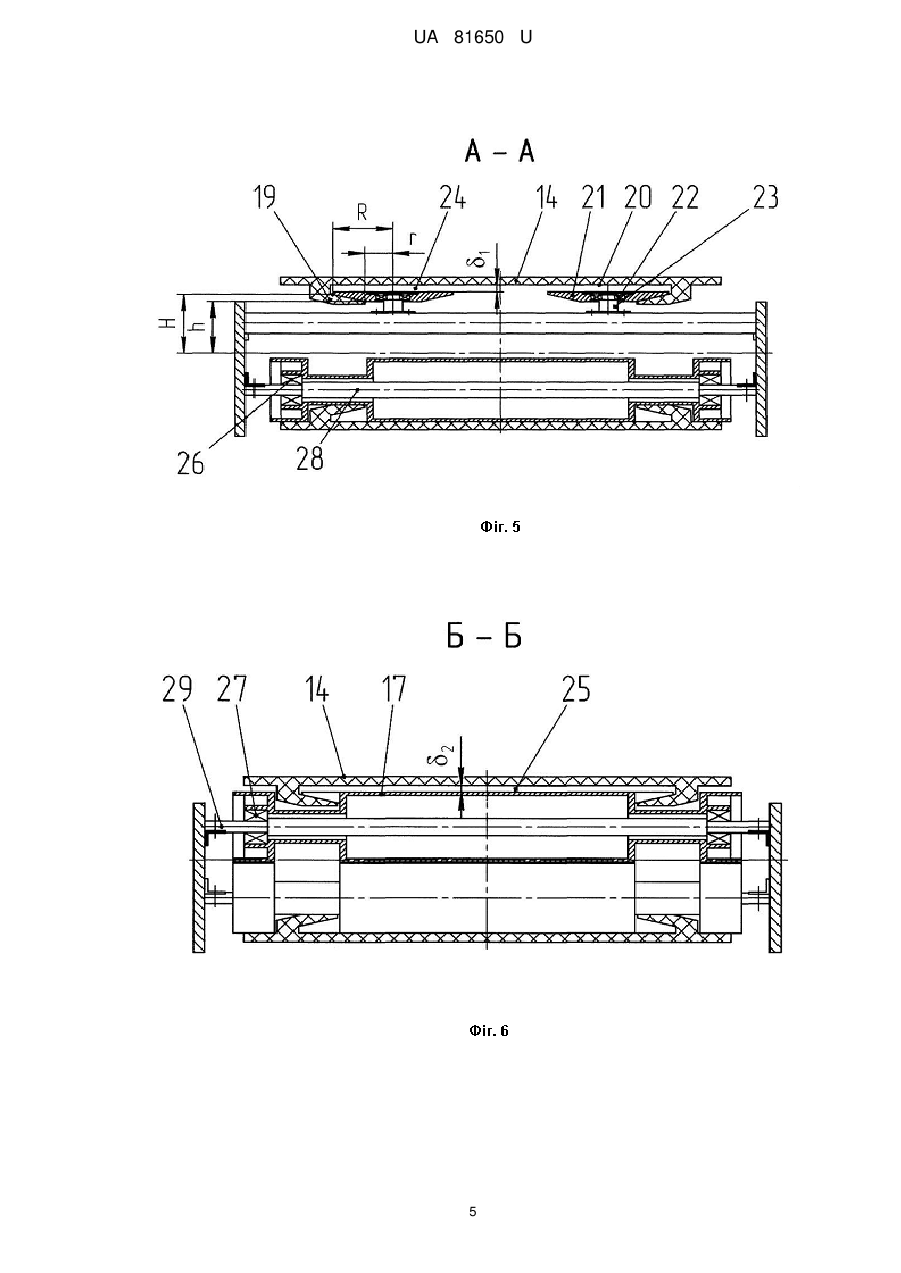
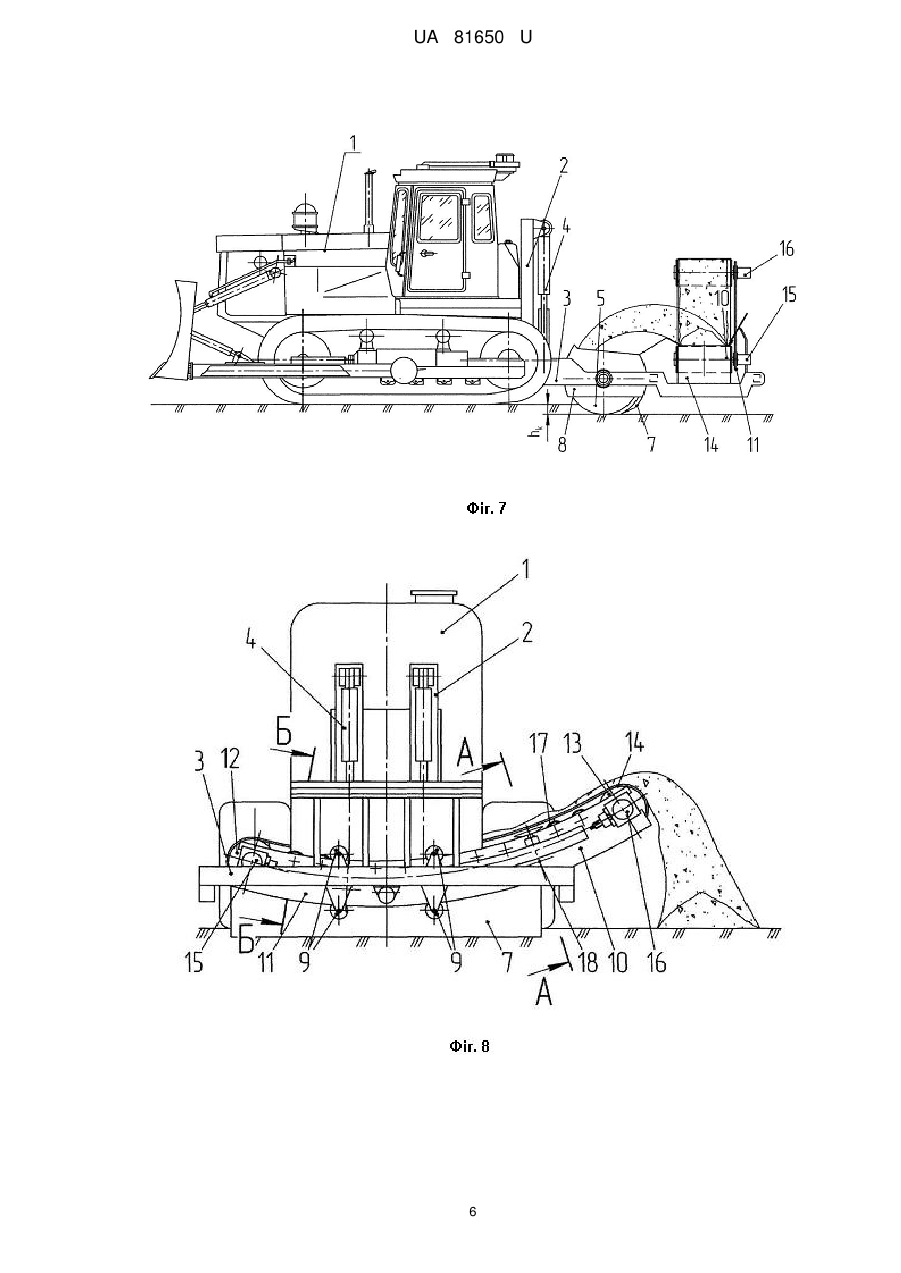
Реферат: Землерийно-транспортна машина безперервної дії містить базову машину, різально-метальний робочий орган, розвантажувальний транспортер з роликами. Розвантажувальний транспортер виконаний у вигляді дугоподібного стрічкового конвеєра з додатковими конусоподібними роликами, закріпленими на нерухомій осі, причому внутрішня сторона стрічки обладнана симетричними відносно поздовжньої осі напрямними. UA 81650 U (54) ЗЕМЛЕРИЙНО-ТРАНСПОРТНА МАШИНА БЕЗПЕРЕРВНОЇ ДІЇ UA 81650 U UA 81650 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до дорожніх машин, детальніше до машин для пошарової розробки ґрунту та його зовнішнього транспортування. Відома конструкція машини безперервної дії у вигляді грейдер-елеватора, яка складається з різального дискового ножа, що за допомогою сили тяги базової машини здійснює різання ґрунту з подальшим завантаженням його на конвеєр зовнішнього транспортування [1]. Недоліки такої конструкції полягають у тому, що неможливо отримати рівну поверхню після розробки ґрунту, зусилля копання залежить від тягово-зчіпних властивостей ходового обладнання. Завантаження зрізаного ґрунту на конвеєр відбувається за рахунок підпору ґрунту, що є не ефективним, та передбачає втрати ґрунту зовні в просвітах між дисковим ножем та транспортером. Найбільш близьким аналогом до запропонованого технічного рішення є землерийнотранспортна машина безперервної дії, яка містить базову машину, різально-метальний робочий орган, розвантажувальний транспортер з роликами [2]. Недоліком такої конструкції є неможливість регулювання відстані транспортування ґрунту та зміна напряму розвантаження зрізаного ґрунту. Також, обмежене застосування машини внаслідок переміщення ґрунту в одному напрямку. В основу корисної моделі поставлена задача підвищення ефективності використання землерийно-транспортної машини за рахунок наявності нових конструктивних елементів та особливостей виконання і розташування вже існуючих. Поставлена задача вирішується тим, що у землерийно-транспортній машині безперервної дії, що містить базову машину, різально-метальний робочий орган, розвантажувальний транспортер з роликами, відповідно до корисної моделі, розвантажувальний транспортер виконаний у вигляді дугоподібного стрічкового конвеєра з додатковими конусоподібними роликами, закріпленими на нерухомій осі, причому внутрішня сторона стрічки обладнана симетричними відносно поздовжньої осі напрямними. При цьому стрічковий конвеєр обладнаний механізмом пересування у вигляді приводу, вихідна шестерня якого зчеплена з дугоподібною зубчастою рейкою, закріпленою нерухомо на стрічковому конвеєрі. Співвідношення радіусів більшої R та меншої r основ конусоподібних роликів дорівнює співвідношенню максимальної Η та мінімальної h відстані площин ролика від осі симетрії конвеєра, а саме R/r=H/h. Суть корисної моделі пояснюється кресленнями, де на Фіг. 1 - показана конструкція землерийно-транспортної машини безперервної дії, вигляд збоку; на Фіг. 2 - показана конструкція землерийно-транспортної машини безперервної дії, вигляд зверху; на Фіг. 3 показана конструкція землерийно-транспортної машини безперервної дії, вигляд ззаду; на Фіг. 4 - показана конструкція розвантажувального транспортера, вигляд збоку; на Фіг. 5 - переріз А-А на Фіг. 4; на Фіг. 6 - переріз Б-Б на Фіг. 4; на Фіг. 7 - робочий процес землерийно-транспортної машини безперервної дії, вигляд збоку; на Фіг. 8 - робочий процес землерийно-транспортної машини безперервної дії, вигляд ззаду; на Фіг. 9 переріз А-А на Фіг. 8; на Фіг. 10 - переріз Б-Б на Фіг. 8. Землерийно-транспортна машина безперервної дії складається з базового трактора 1 (Фіг. 1-10), опорної рами 2, рами 3 робочого обладнання, гідроциліндрів 4 підйому рами 2. На рамі 2 змонтовано різально-метальний робочий орган 5 (Фіг. 2) з приводом 6, зачисний ніж 7, захисний кожух 8, а також за допомогою опорних котків 9 встановлено дугоподібний стрічковий конвеєр 10. Стрічковий конвеєр 10 (Фіг. 3) складається з рами 11, приводних барабанів 12 і 13, конвеєрної стрічки 14, гідромоторів 15 та 16 (Фіг. 4) приводу барабанів 12 і 13, опорних роликоопор 17, підтримуючих роликоопор 18. Внутрішня сторона стрічки 14 обладнана симетричними відносно поздовжньої осі напрямними 19 з утвореними на них однобічними клиноподібними порожнинами 20 із похилими поверхнями яких взаємодіють конусоподібні ролики 21 (Фіг. 5), що змонтовані за допомогою підшипників 22 на нерухомих осях 23. Між більшою основою конусоподібних роликів 21 та горизонтальними поверхнями порожнини 20 напрямних 19 утворені просвіти 24 товщиною δ1, яка перевищує товщину δ2 просвітів 25 між стрічкою 14 та опорними роликоопорами 17 (Фіг. 6) Роликоопори 17 та 18 за допомогою підшипників кочення 26, 27 відповідно встановлені на нерухомих осях 28 і 29. Механізм зміни вильоту конвеєра складається з приводу 30 (Фіг. 3), вихідна шестерня якого знаходиться у зачепленні з дугоподібною зубчастою рейкою 31 закріпленою нерухомо на рамі 11 стрічкового конвеєра 10. Різально-метальний робочий орган 5 складається з симетрично розташованих відносно повздовжньої осі машини гвинтових поверхонь 32 і 33 з протилежними напрямами навивки і різальними ножами 34 (Фіг. 2). Відношення радіусів більшої R та меншої г основ конусоподібних роликів 21 дорівнює відношенню максимальній Η та мінімальній h відстані 1 UA 81650 U 5 10 15 20 25 30 розміщення похилої поверхні у напрямних 19 стрічки відносно осі симетрії конвеєра 10, а саме R/r=H/h (Фіг. 5). За допомогою базового трактора 1 робоче обладнання переміщується до місця виконання землерийних робіт (Фіг. 7). Перед початком роботи стрічковий конвеєр 10 за рахунок обертання приводу 30 шестерня взаємодії із зубчастою рейкою 31 переміщується із транспортного стану в робочий убік напряму зовнішнього транспортування ґрунту. Далі в залежності від напряму бічного транспортування вмикається один із гідромоторів 15 або 16 (Фіг. 8) приводу барабанів 12 або 13 і починається рух конвеєрної стрічки 14 у холостому режимі. У цьому випадку конвеєрна стрічка 14 зберігає первісну дугоподібну форму завдяки роликам 21 (Фіг. 9), які взаємодіють з похилими поверхнями порожнин 20 у напрямних 19 і не дають вигинатися стрічці 14 у напрямі до центра кривизни та забезпечують постійне тягове зусилля на привідному барабані 12 або 13. Наступними діями є вмикання приводу 6 різально-метального робочого органа 5. Далі починається переміщення базового трактора 1 з одночасним опусканням гідроциліндрами 4 робочого обладнання на необхідну глибину різання hk. Під час виконання робочого процесу землерийно-транспортною машиною безперервної дії ґрунт зрізується ножами 34 та за допомогою гвинтових поверхонь 32 та 33 транспортується метанням на стрічковий конвеєр 10. За рахунок падіння ґрунту та його власної ваги збільшується навантаження на стрічку 14 і відбувається її подовження. Внаслідок цього явища у напрямних 19 похилі поверхні порожнин 20 віддаляються від конусоподібних роликів 21 і між ними утворюються просвіти 24 (Фіг. 9). Віддалення припиняється, коли внутрішня плоска сторона конвеєрної стрічки 14 дотикається до циліндричних поверхонь опорних роликів 17 (Фіг. 10). Так як, величина просвітів δ1 > δ2 при нерухомій стрічці, то під час бічного транспортування ґрунту і спирання стрічки 14 на опорні роликоопори 17 більші основи конусоподібних роликів не взаємодіють з напрямними 19. Виконання відношення R/r=H/h дозволяє уникнути сковзання стрічки 14 відносно конусоподібних роликів 21 і забезпечити тільки їх кочення по стрічці 14 (Фіг. 5). Запропонована конструкція дозволяє підвищити ефективність використання землерийнотранспортної машини безперервної дії за рахунок можливості регулювання дальності транспортування ґрунту та зміни напряму розвантаження зрізаного ґрунту і тим самим розширити область застосування даної машини. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 1. Землерийно-транспортна машина безперервної дії, яка містить базову машину, різальнометальний робочий орган, розвантажувальний транспортер з роликами, яка відрізняється тим, що розвантажувальний транспортер виконаний у вигляді дугоподібного стрічкового конвеєра з додатковими конусоподібними роликами, закріпленими на нерухомій осі, причому внутрішня сторона стрічки обладнана симетричними відносно поздовжньої осі напрямними. 2. Землерийно-транспортна машина безперервної дії за п. 1, яка відрізняється тим, що стрічковий конвеєр обладнаний механізмом пересування у вигляді приводу, вихідна шестерня якого зчеплена з дугоподібною зубчастою рейкою, закріпленою нерухомо на стрічковому конвеєрі. 3. Землерийно-транспортна машина безперервної дії за пп. 1, 2, яка відрізняється тим, що співвідношення радіусів більшої R та меншої r основ конусоподібних роликів дорівнює співвідношенню максимальної Η та мінімальної h відстані площин ролика від осі симетрії конвеєра , а саме R/r=H/h. 2 UA 81650 U 3 UA 81650 U 4 UA 81650 U 5 UA 81650 U 6 UA 81650 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюContinuous earthmover
Автори англійськоюHolubchenko Oleksandr Ivanovych, Khozhylo Maksym Eduardovych
Назва патенту російськоюЗемлеройно-транспортная машина непрерывного действия
Автори російськоюГолубченко Александр Иванович, Хожило Максим Эдуардович
МПК / Мітки
МПК: E02F 3/76
Мітки: дії, безперервної, машина, землерийно-транспортна
Код посилання
<a href="https://ua.patents.su/9-81650-zemlerijjno-transportna-mashina-bezperervno-di.html" target="_blank" rel="follow" title="База патентів України">Землерийно-транспортна машина безперервної дії</a>
Землерийно-транспортна машина безперервної дії
Номер патенту: 46899
Опубліковано: 11.01.2010
Автори: Фоменко Гліб Костянтинович, Голубченко Олександр Іванович, Хожило Максим Едуардович
МПК: E02F 5/00
Мітки: землерийно-транспортна, дії, машина, безперервної
Формула / Реферат:
1. Землерийно-транспортна машина безперервної дії, що містить базовий трактор, основну раму, зчіпний пристрій для з'єднання трактора та основної рами, фрезерний робочий орган з приводом, розвантажувальний транспортер, гідроциліндри керування, яка відрізняється тим, що фрезерний робочий орган виконано у вигляді змонтованих на приводному валу симетрично розташованих відносно повздовжньої осі машини гвинтових поверхонь з протилежними напрямами...
Землерийно-транспортна машина
Номер патенту: 20115
Опубліковано: 15.01.2007
Автори: Деревянчук Михайло Іванович, Басій В'ячеслав Васильович, Максюк Андрій Анатолійович, Хмара Леонід Андрійович
МПК: E02F 3/76
Мітки: землерийно-транспортна, машина
Формула / Реферат:
Землерийно-транспортна машина, що містить базовий трактор та прикріплену до його задньої частини паралелограмну підвіску, яка відрізняється тим, що в передній частині базового трактора змонтовано навантажувальне обладнання, а до поперечної балки паралелограмної підвіски прикріплені кронштейни двостороннього відвалу, при цьому внутрішня частина відвалу має прямий ніж, а зовнішня - кутові скошені ножі.
Землерийно-транспортна машина

Номер патенту: 20661
Опубліковано: 15.02.2007
Автори: Басій В'ячеслав Васильович, Деревянчук Михайло Іванович, Максюк Андрій Анатолійович, Хмара Леонід Андрійович
МПК: E02F 3/76
Мітки: землерийно-транспортна, машина
Формула / Реферат:
Землерийно-транспортна машина, що містить базовий трактор та прикріплену до його задньої частини паралелограмну підвіску, яка відрізняється тим, що в передній частині базового трактора змонтовано навантажувальне обладнання, а до поперечної балки паралелограмної підвіски прикріплені кронштейни двостороннього відвала, при цьому його внутрішня частина відвала має прямий ніж, а зовнішня - кутові скошені ножі.
Землерийно-планувальна машина
Номер патенту: 93107
Опубліковано: 10.01.2011
Автори: Шмаров Володимир Данилович, Шмаров Андрій Володимирович
МПК: E02F 3/76
Мітки: землерийно-планувальна, машина
Формула / Реферат:
Землерийно-планувальна машина, яка містить тягач з відвальним робочим органом, напівпричіпний візок, з'єднаний з тягачем, раму, яка відрізняється тим, що рама складається з двох горизонтальних і двох вертикальних багатократних паралелограмів, які утворюють в перерізі, перпендикулярному до поздовжньої осі машини, прямокутник, з'єднаних між собою кінцівками важелів за допомогою кутових деталей і кріплень, рухомих відносно осей кріплень,...
Відвал землерийно-транспортної машини
Номер патенту: 30294
Опубліковано: 25.02.2008
Автори: Талалай Віктор Олександрович, Хмара Леонід Андрійович
МПК: E02F 3/76
Мітки: землерійно-транспортної, машини, відвал
Формула / Реферат:
Відвал землерийно-транспортної машини, що включає лобовий лист та жорстко з'єднані бокові секції з криволінійними робочими поверхнями, виступаючий та традиційні ножі, який відрізняється тим, що виступаючий ніж трапецієподібної форми з'єднаний з традиційними ножами, що мають бокові зрізи, кут нахилу яких дорівнює куту трапецієподібності виступаючого ножа, боковими косинками, що встановлені перпендикулярно боковим граням ножів, та має нахилені...
Попередній патент: Позисторний матеріал на основі титанату барію-натрію-вісмуту
Наступний патент: Спосіб утворення повністю регулярного мікрорельєфу на друкарських циліндрах
Випадковий патент: Гербіцидна композиція для боротьби з бур'янами у посівах ріпаку