Спосіб переміщення транспортного засобу у просторі
Формула / Реферат
1. Спосіб переміщення транспортного засобу у просторі, при якому за допомогою рушія, розміщеного на транспортному засобі, формують направлений потік робочої маси/тіла, який створює тягу і призводить до зміни стану системи - руху центра мас системи по осі результуючої сили і, як слідство, руху безпосередньо транспортного засобу з рушієм в цілому в указаному напрямку, при цьому створюється і підтримується дисбаланс енергій - між постійною енергією зовні і енергією, що змінюється, всередині корпусу рушія, який відрізняється тим, що тягу створюють всередині корпусу рушія, що має замкнутий герметичний контур/систему, без викидання мас робочого тіла за межі зазначеного корпусу рушія, при цьому направлений потік робочої маси/тіла, який створює тягу рушія, не супроводжується втратою маси робочого тіла й практично не має обмеження часу дії.
2. Спосіб за п. 1, який відрізняється тим, що піднімальну силу й горизонтальну тягу створюють всередині корпусу рушія без впливу на зовнішнє середовище й незалежно від нього.
3. Спосіб за п. 1 та п. 2, який відрізняється тим, що потік робочої маси/тіла створюють в порожнині корпусу рушія з використанням приводу робочої маси/тіла.
4. Спосіб за п. 1, який відрізняється тим, що формування результуючої сили, що змушує рушій прискорюватися, зміну її напрямку й величини здійснюють за допомогою зміни напрямків сил, відповідно, від робочої маси/тіла, що переміщується всередині порожнини рушія, та швидкості потоку зазначеної робочої маси/тіла.
5. Спосіб за п. 1, який відрізняється тим, що як робочу масу/тіло використовують одну або декілька речовин різних за характеристиками щільності, при щільності однієї з речовин не менше щільності води.
6. Спосіб за п. 1 та п. 5, який відрізняється тим, що у випадку застосування двох типів речовин, одна речовина повинна мати щільність на кілька порядків більшу, ніж щільності іншої рідини - робочої маси/тіла.
Текст
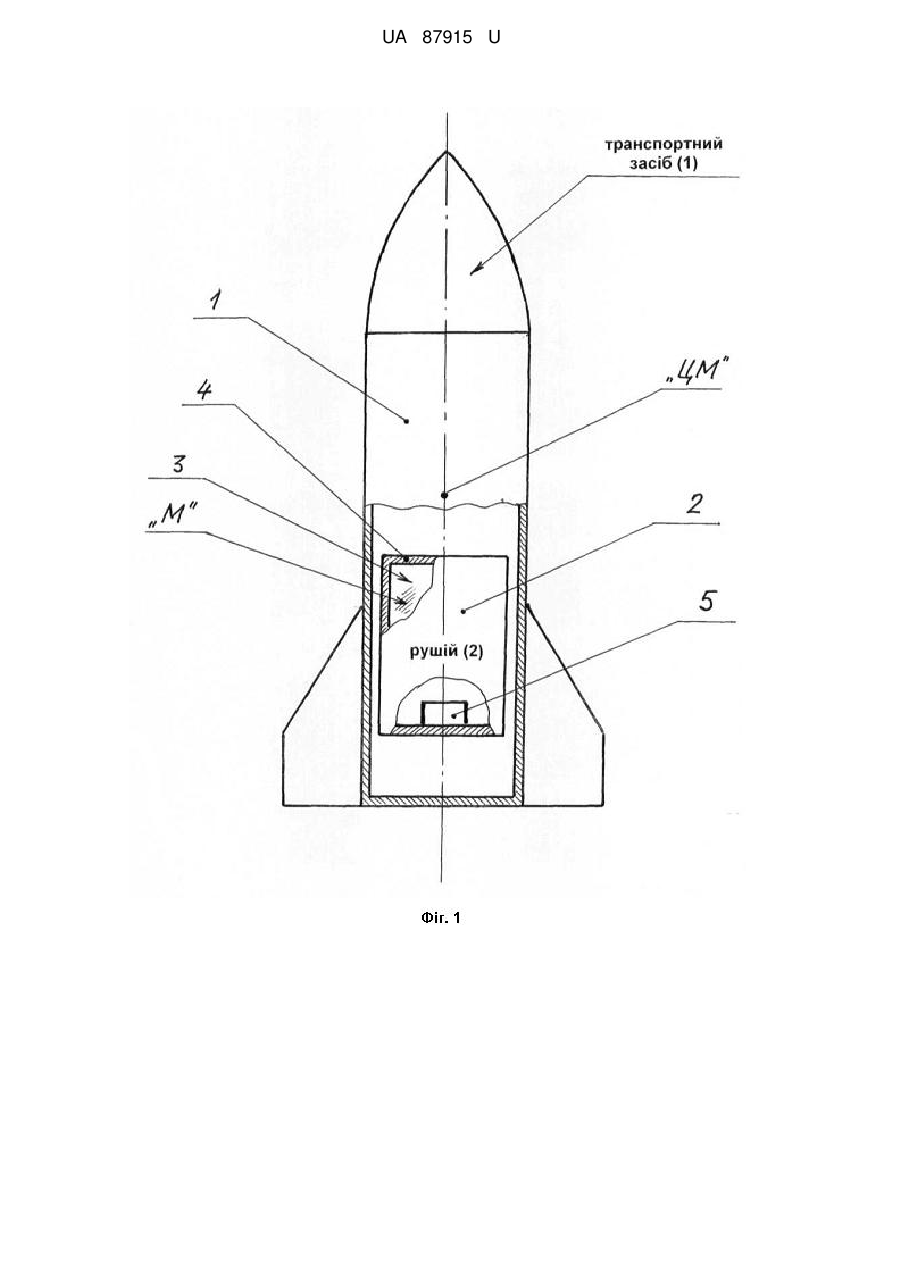
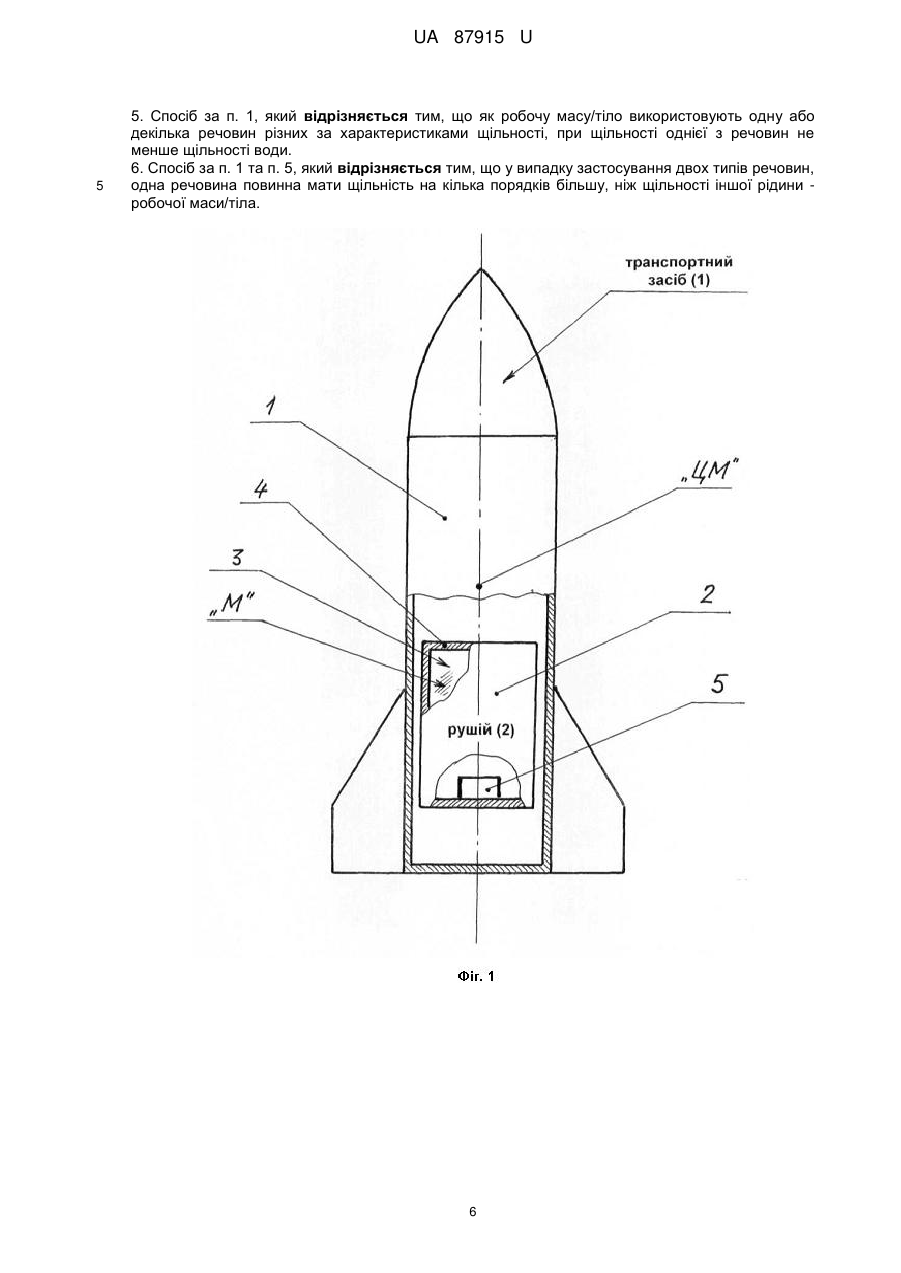
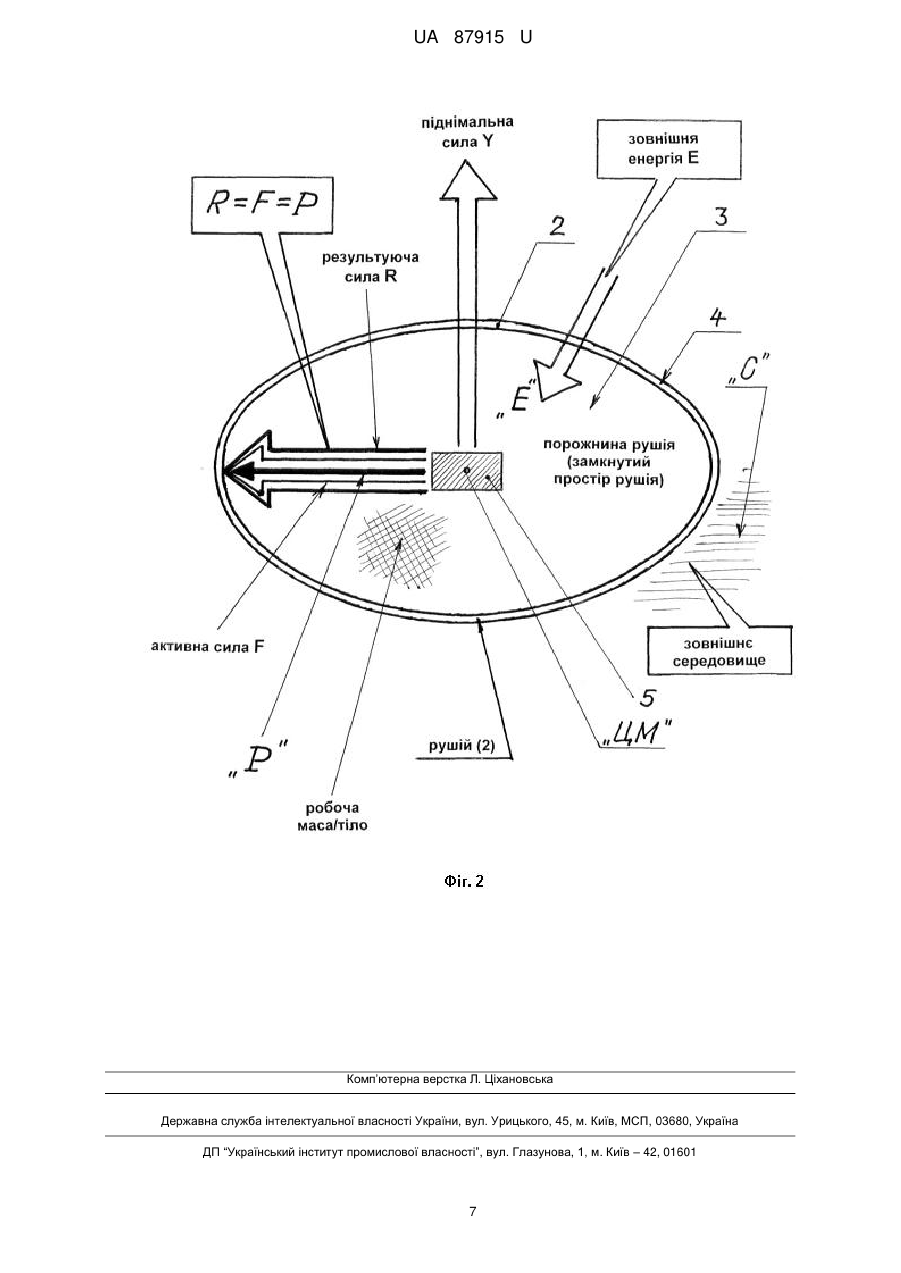
Реферат: Спосіб переміщення транспортного засобу у просторі, при якому за допомогою рушія, розміщеного на транспортному засобі, формують направлений потік робочої маси/тіла, який створює тягу і призводить до зміни стану системи - руху центра мас системи по осі результуючої сили і, як слідство, руху безпосередньо транспортного засобу з рушієм в цілому в указаному напрямку, при цьому створюється і підтримується дисбаланс енергій - між постійною енергією зовні і енергією, що змінюється, всередині корпусу рушія. Тягу створюють всередині корпусу рушія, що має замкнутий герметичний контур/систему, без викидання мас робочого тіла за межі зазначеного корпусу рушія, при цьому направлений потік робочої маси/тіла, який створює тягу рушія, не супроводжується втратою маси робочого тіла й практично не має обмеження часу дії. UA 87915 U (54) СПОСІБ ПЕРЕМІЩЕННЯ ТРАНСПОРТНОГО ЗАСОБУ У ПРОСТОРІ UA 87915 U UA 87915 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі техніки, зокрема до способів переміщення транспортних засобів, а саме до способів переміщення транспортних засобів у просторі, і може бути застосований для переміщення транспортних засобів у просторі з використанням тяги рушія безопорного типу. Безопорний рушій - це пристрій, що забезпечує переміщення в просторі за рахунок імпульсів, що відбуваються в закритій системі. Для функціонування такого типу рушіїв не потрібна взаємодія транспортного засобу із зовнішнім середовищем, що складається з молекул або з інших матеріальних часток. Транспортний засіб, обладнаний таким рушієм, ніякими своїми частинами не відштовхується від названого зовнішнього середовища, не "угвинчується" у нього, не викидає із себе ніяких матеріальних часток (робочої маси/тіла), не штовхається іншими (зовнішніми стосовно оболонки) матеріальними частками. До таких належать рушії, що взаємодіють із зовнішніми полями не молекулярного типу (поле гравітації, теплове поле, магнітне поле, електромагнітне поле тощо) і рушії відцентрові, які за рахунок обертання вантажів усередині самого рушія генерують не скомпенсоване тягове зусилля, що переміщає транспортний засіб у зовнішньому середовищі. Особливістю даних рушіїв (як механічних пристроїв для переміщення транспортних засобів) є: - перебуваючи в стані автономної, ізольованої системи, наприклад в умовах невагомості, при відсутності точки опори, за рахунок внутрішніх сил системи, механічний пристрій матеріальна система, приводить себе в рух, відповідно, обертальний або прямолінійний, а також його припиняє; - принцип дії зазначених безопорних рушіїв (механічних пристроїв) заснований на використанні явищ, наприклад, процесії гіроскопів і їхньої особливості - руху матеріального тіла перпендикулярно дії зовнішніх сил, а також сил інерції - внутрішніх сил системи, і їхніх властивостей - відсутності сил протидії й точки опори. Пристрої безопорного руху (безопорні рушії) можуть бути використані як силові приводи в умовах невагомості - відсутності точки опори, для переміщення космічних об'єктів, конструкцій, при проведенні монтажних робіт у космосі, створенні індивідуальних літальних апаратів, а також здійснення "динамічної опори" - гасіння сил інерції маси тіла, що рухається, в умовах невагомості. Дія пристроїв безопорного руху може здійснюватися за рахунок поновлюваних джерел, наприклад сонячної енергії. Рушій може бути також використаний в умовах наявності сил тяжіння у випадках, коли використання традиційної точки опори "земля" недоцільно або неможливо. Вказаний вище специфічний ефект свідчить про необов'язковість закону збереження глобального імпульсу для замкнутої системи тіл з розподіленими масами, на противагу безальтернативності закону збереження глобального імпульсу для замкнутої системи тіл зі сконцентрованими масами (саме такі системи дотепер розглядалися в механічному розділі фізики). Під замкнутою системою тіл з розподіленими масами розуміється така система, у якій одне з тіл (робоче тіло чи робоча маса) рівномірно розподілено по внутрішньому об'єму зазначеної замкнутої системи, і його елементарні частинки можуть переміщатися усередині цього об'єму, але так, що центр маси робочого тіла не міняє свого положення щодо загального центра мас замкнутої системи (рушія). Природно, причиною переміщень елементарних частинок робочого тіла служать певні сили, що є саме внутрішніми силами системи. І природно, при переміщеннях елементарні частинки робочого тіла, що контактують зі стінками внутрішнього об'єму системи, впливають на ці стінки відповідними силами. Подібні взаємодії, природно, підкоряються закону збереження локального імпульсу. На сталому режимі циркуляції робочого тіла всі внутрішні сили перебувають у рівновазі [1]. Винятковість замкнутій системі тіл з розподіленими масами надають процеси в ній і саме її поводження на перехідному режимі включення (або вимикання) циркуляції робочого тіла. У цьому випадку внутрішні зусилля в системі тимчасово не дають рівноваги. У результаті тимчасової переваги одного із зусиль над протилежним зусиллям і під дією імпульсу відповідного зусилля - у цілому замкнута система міняє свою швидкість, тобто спостерігається збільшення глобального імпульсу замкнутої системи тіл з розподіленими масами, причому при нульовій рівнодіючій зовнішніх сил або при відсутності зовнішніх сил взагалі [2]. Відомий спосіб переміщення транспортних засобів у просторі, при якому використовують рушій, що створює тягу направленим переміщенням робочого тіла - повітря, при цьому тяга створюється на ефекті різниці статичних тисків всередині і зовні корпуса рушія, а динамічна складова повітряного потоку є повністю скомпенсованою [3]. До недоліків відомого способу належить те, що тягу створюють всередині корпусу рушія не замкнутого типу контуру/системи, з викиданням мас робочого тіла за межі зазначеного корпусу 1 UA 87915 U 5 10 15 20 25 30 35 40 45 50 55 рушія, тим самим не забезпечується, при роботі рушія, збереження робочої маси/тіла (направлений потік робочої маси/тіла, який створює тягу рушія, супроводжується втратою маси робочого тіла й має обмеження часу дії). Відомий спосіб переміщення транспортних засобів у просторі, при якому використовують рушій, що створює тягу направленим переміщенням робочого тіла, при цьому тяга створюється на ефекті збільшеного тиску всередині корпусу рушія і зниження тиску у другому контурі, що являє собою оболонку зовні корпусу рушія, причому як робоче тіло застосовано газоподібну чи рідку речовину [4]. До недоліків відомого способу належить те, що тягу створюють всередині корпусу рушія не замкнутого типу контуру/системи, з викиданням мас робочого тіла за межі зазначеного корпусу рушія, тим самим не забезпечується, при роботі рушія, збереження робочої маси/тіла (направлений потік робочої маси/тіла, який створює тягу рушія, супроводжується втратою маси робочого тіла й має обмеження часу дії). Відомий спосіб переміщення транспортних засобів у просторі, при якому використовують рушій, що створює тягу направленим переміщенням робочого тіла, у якому корпус виконано розділеним двома однаковими площинами, зміщеними відносно одна до другої так, що ділянка нижньої площини є більшою за виступанням всередину корпусу, ніж верхня, і навпаки, ділянка нижньої площини є меншою за виступанням зовні корпусу, ніж верхня, при цьому тяга створюється на основі ефекту Бернулі шляхом створення підвищеного тиску на зазначених площинах динамічним потоком повітря/рідини, що протікає між ними з великою швидкістю, і дії при цьому підвищеного тиску на зміщену всередині корпусу ділянку нижньої площини і атмосферного тиску, що є меншим ніж всередині корпусу, на зміщену зовні корпусу ділянку верхньої площини [5]. До недоліків відомого способу належить те, що для здійснення цього способу необхідна велика витрата енергії, обумовлена малим коефіцієнтом корисної дії теплових рушіїв, які створюють динамічний потік повітря/рідини. До недоліків належить істотна неекологічність процесу, пов'язана з необхідністю викиду в навколишнє середовище продуктів згоряння робочої речовини рушія об'єкта - транспортного засобу. Необхідність наявності запасу палива для здійснення способу створення тяги негативно позначається на масових характеристиках об'єкта - транспортного засобу, для якого використовується зазначений спосіб. Відомий спосіб переміщення транспортних засобів у просторі, при якому використовують рушій, що використовує для створення тяги і, як слідство, для руху системи, турбулентну течію середовища [6]. До недоліків відомого способу належить те, що для реалізації способу застосовано рушій, що використовує турбулентну течію середовища, недоліком якого, у свою чергу, є його низький ККД, а також наявність частин пристрою, що переміщуються взаємно, обов'язкова наявність рідини, що робить досить скрутним роботу рушія (двигуна) у широкому діапазоні температур. До основних недоліків відомого способу належить й те, що тягу створюють всередині корпусу рушія не замкнутого типу контуру/системи, з викиданням мас робочого тіла за межі зазначеного корпусу рушія, тим самим не забезпечується, при роботі рушія, збереження робочої маси/тіла (направлений потік робочої маси/тіла, який створює тягу рушія, супроводжується втратою маси робочого тіла й має обмеження часу дії). Відомий спосіб переміщення транспортних засобів у просторі, при якому використовують рушій, що використовує для створення тяги й, як наслідок, для руху системи, явище кавітації рідини [7]. До недоліків відомого способу належить те, що для реалізації способу застосовано рушії, що використовують кавітацію рідини, недоліком яких, у свою чергу, є їх низький ККД, а також наявність частин пристрою, що переміщаються взаємно, обов'язкова наявність рідини, що робить досить скрутним роботу рушіїв у широкому діапазоні температур. До основних недоліків відомого способу належить й те, що тягу створюють всередині корпусу рушія не замкнутого гину контуру/системи, з викиданням мас робочого тіла за межі зазначеного корпусу рушія, тим самим не забезпечується, при роботі рушія, збереження робочої маси/тіла (направлений потік робочої маси/тіла, який створює тягу рушія, супроводжується втратою маси робочого тіла й має обмеження часу дії). Відомий спосіб переміщення об'єкта у просторі, що включає створення на об'єкті магнітного поля й переміщення в цьому полі тіл, механічно зв'язаних з об'єктом, при цьому магнітне поле створюють із векторним потенціалом, орієнтованим під кутом 90-270° до космологічного електромагнітного векторного потенціалу, а щонайменше частину тіл переміщують в області знижених значень потенціалу, рівного сумі зазначених вище векторних потенціалів [8]. 2 UA 87915 U 5 10 15 20 25 30 35 40 45 50 55 60 Недоліками відомого способу є обмежена область застосування (там, де є підходяще середовище) і відносно високі енерговитрати на генерацію необхідних збудливих електромагнітних полів. Відомий спосіб переміщення об'єкта у просторі, при якому рух всієї конструкції забезпечується за рахунок взаємодії сил самоіндукції з електричними зарядами на обкладках конденсатора, що виникають в електричному коливальному контурі [9]. Недоліками відомого способу є обмежена область застосування (насамперед, де є підходяще середовище) і відносно високі енерговитрати на генерацію необхідних збудливих електромагнітних полів. Найбільш близьким технічним рішенням як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є спосіб переміщення транспортного засобу у просторі, при якому за допомогою рушія, розміщеного на транспортному засобі, формують направлений потік робочої маси/тіла, який створює тягу і призводить до зміни стану системи руху центра мас системи по осі результуючої сили і, як слідство, руху безпосередньо транспортного засобу з рушієм в цілому в указаному напрямку, при цьому створюється і підтримується дисбаланс енергій - між постійною енергією зовні і енергією, що змінюється, всередині корпусу рушія [10]. До недоліків відомого способу, який вибрано за найближчий аналог (прототип), належить те, що для реалізації способу застосовано рушії, що використовують ефект викидання з великою швидкістю робочу масу/тіло з корпусу рушія, чим створюють тягу. До основних недоліків відомого способу належить й те, що тягу створюють всередині корпусу рушія не замкнутого типу контуру/системи, з викиданням мас робочого тіла за межі зазначеного корпусу рушія, тим самим не забезпечується, при роботі рушія, збереження робочої маси/тіла (направлений потік робочої маси/тіла, який створює тягу рушія, супроводжується втратою маси робочого тіла й має обмеження часу дії). До недоліків належить й те, що піднімальну силу й горизонтальну тягу неможливо створити без впливу на зовнішнє середовище й незалежно від нього. В основу корисної моделі поставлено задачу шляхом використання для одержання руху тільки внутрішні енергетичні запаси, реалізовані в замкнутому циклі - у рушії/системі, практично без витрат енергії і витрат робочої маси/тіла, забезпечити додання транспортним засобам, на яких встановлені рушії, що формують направлений потік робочої маси/тіла, який створює тягу і призводить до зміни стану системи - руху центра мас системи по осі результуючої сили, будьяку швидкість, навіть нескінченно велику. Суть корисної моделі в способі переміщення транспортного засобу у просторі, при якому за допомогою рушія, розміщеного на транспортному засобі, формують направлений потік робочої маси/тіла, який створює тягу і призводить до зміни стану системи - руху центра мас системи по осі результуючої сили і, як слідство, руху безпосередньо транспортного засобу з рушієм в цілому в указаному напрямку, при цьому створюється і підтримується дисбаланс енергій - між постійною енергією зовні і енергією, що змінюється, всередині корпусу рушія, полягає в тому, що тягу створюють всередині корпусу рушія, що має замкнутий герметичний контур/систему, без викидання мас робочого тіла за межі зазначеного корпусу рушія, при цьому направлений потік робочої маси/тіла, який створює тягу рушія, не супроводжується втратою маси робочого тіла й практично не має обмеження часу дії. Суть корисної моделі полягає і в тому, що піднімальну силу й горизонтальну тягу створюють всередині корпусу рушія без впливу на зовнішнє середовище й незалежно від нього, а потік робочої маси/тіла створюють в порожнині корпусу рушія з використанням приводу робочої маси/тіла. Новим в корисній моделі є те, що формування результуючої сили, що змушує рушій прискорюватися, зміну її напрямку й величини здійснюють за допомогою зміни напрямків сил, відповідно, від робочої маси/тіла, що переміщується всередині порожнини рушія, та швидкості потоку зазначеної робочої маси/тіла. Новим в корисній моделі є й те, що як робочу масу/тіло використовують одну або декілька речовин різних за характеристиками щільності, але не менше щільності води однієї з речовин, а у випадку застосування двох типів речовин, одна речовина повинна мати щільність на кілька порядків більшим, ніж щільність іншої рідини - робочої маси/тіла. Рішення технічної задачі в способі переміщення транспортного засобу у просторі, що заявляється, дійсно можливе тому, що: - шляхом створення тяги всередині корпусу рушія, що має замкнутий герметичний контур/систему, без викидання мас робочого тіла за межі зазначеного корпусу рушія, забезпечують те, що направлений потік робочої маси/тіла, який створює тягу рушія, не супроводжується втратою маси робочого тіла й практично не має обмеження часу дії; - шляхом використання як робочої маси/тіла одну або декілька речовин різних за щільністю, але не менше щільності води однієї з речовин, забезпечують те, що при безперервній 3 UA 87915 U 5 10 15 20 25 30 35 40 45 50 55 циркуляції робочої маси/тіла (або речовини), що утворить поздовжній струмінь, реактивне тягове зусилля у камері високого тиску рушія (через свою часткову або повну незкомпенсованість) стає для замкнутої системи рушія за кінематикою тотожним звичайній реактивній тязі, але без викидів робочої маси/тіла (або речовини) з внутрішнього об'єму рушія в навколишній простір; - шляхом застосування двох типів речовин, де одна з речовина повинна мати щільність на кілька порядків більшою, ніж щільність іншої рідини - робочої маси/тіла, забезпечують виключення будь-якої механічної роботи складових частин рушія для досягнення ефекту руху транспортного засобу й появи паразитного потоку рідини (робочої маси/тіла) у внутрішньому просторі рушія. Таким чином спосіб переміщення транспортного засобу у просторі, що заявляється, відповідає критерію корисної моделі "новизна". Суть технічного рішення в корисній моделі пояснюється за допомогою креслень, де на Фіг. 1 показано схему транспортного засобу з розміщеним у ньому рушієм, який виконано безопорним (для створення безопорного руху транспортного засобу), на Фіг. 2 показано схему створення тяги у замкнутому просторі рушія. Суть способу переміщення транспортного засобу у просторі, що заявляється, полягає в наступному. Попередньо встановлюють на транспортний засіб (1) рушій (2), який виконано замкнутого циклу роботи (див. схему на Фіг. 1). При запуску рушія здійснюють підведення зовнішньої енергії (позиція "Е") у замкнутий простір (3) рушія (2) і створення там активної сили (позиція "F"), які дією на стінки рушія (2) буде створювати тягу (позиція "Р") транспортного засобу (1) - див. схему на Фіг. 2. При цьому відсутній зв'язок із зовнішнім середовищем та відсутні втрати маси робочого тіла (позиція "М"). Для здійснення способу переміщення транспортного засобу у просторі, що заявляється, необхідно, щоб: - тяга ("Р") рушія (2) була створена всередині корпусу рушія (що має замкнутий герметичний контур/систему); - направлений потік робочої маси/тіла ("М"), який створює тягу ("Р") і призводить до зміни стану системи - руху центра мас (позиція "ЦМ") системи по осі результуючої сили, був сформований без викидання мас робочого тіла ("М") за межі зазначеного корпусу (4) рушія (2), а саме, направлений потік робочої маси/тіла ("М"), який створює тягу ("Р") рушія (2), не супроводжувався втратою маси робочого тіла (тоді рушій (2) практично не буде мати обмеження часу дії); - як робоча маса/тіло ("М") було використано одну або декілька речовин різних за характеристиками щільності, але не менше щільності води однієї з речовин, а у випадку застосування двох типів речовин (позиція "М"), одна з речовин повинна мати щільність на кілька порядків більшим, ніж щільність іншої рідини - робочої маси/тіла ("М"). При роботі рушія (1) піднімальну силу Y й горизонтальну тягу ("Р") створюють всередині корпусу (4) рушія (2) без впливу на зовнішнє середовище (позиція "С") й незалежно від нього, при цьому потік робочої маси/тіла ("М") створюють в порожнині корпусу (4) рушія (2) з використанням приводу (5) робочої маси/тіла ("М"). Формування результуючої сили ("R"), що змушує рушій (2) прискорюватися, зміну її напрямку й величини здійснюють за допомогою зміни напрямків сил, відповідно, від робочої маси/тіла ("М"), що переміщується всередині порожнини корпусу (4) рушія (2), та швидкості V потоку зазначеної робочої маси/тіла ("М") - див. схему на Фіг. 2. На цьому процес створення руху транспортного засобу (1) (покладений в основу способу, що заявляється) за допомогою рушія (2), що являє собою "безопорний" рушій, закінчується. Технічне рішення, яке покладене в основу способу переміщення транспортного засобу у просторі, що заявляється, належить до нетрадиційних рушіїв (двигунів) і може бути використане для переміщення об'єктів (транспортних засобів) у просторі, а також у безопорних вантажопідйомних механізмах. Застосування зазначеного технічного рішення дозволить створити якісно нові транспортні засоби: наземні - високошвидкісні безколісні поїзди, направляюча опора яких (на відміну від поїздів на магнітній подушці) не повинна бути силогенеруючою; повітряні - у яких піднімальна сила й горизонтальна тяга (на відміну від вертольотів і літаків) створюється без впливу на повітря й незалежно від нього; космічні вертикальна тяга яких (на відміну від реактивних ракет) не супроводжується втратою маси палива й практично не має обмеження часу дії. 4 UA 87915 U 5 10 15 20 25 30 35 40 45 50 55 Властивість безопорних рушіїв, що використовують для одержання руху тільки внутрішні енергетичні запаси, і які реалізовані в замкнутому циклі (тобто практично без витрат енергії), дозволить надавати апаратам, на яких вони встановлені, будь-яку швидкість (навіть нескінченно велику) тому, що фізичні обмеження на її межу не встановлюються, що дає принципову можливість, навіть при існуючому рівні розвитку земної техніки, посилати космічні апарати не тільки до планет Сонячної системи, але й у найближчому майбутньому досягати зоряних систем у реальних інтервалах часу [11], [12]. Підвищення ефективності застосування способу переміщення транспортного засобу у просторі, що заявляється, у порівнянні з прототипом, досягається шляхом створення тяги всередині корпусу рушія, що має замкнутий герметичний контур/систему, без викидання мас робочого тіла за межі зазначеного корпусу рушія. Зазначене забезпечує те, що направлений потік робочої маси/тіла, який створює тягу рушія, не супроводжується втратою маси робочого тіла й практично не має обмеження часу дії, а застосування двох типів речовин, де одна з речовина повинна мати щільність на кілька порядків більшим, ніж щільність іншої рідини робочої маси/тіла, забезпечує виключення будь-якої механічної роботи складових частин рушія для досягнення ефекту руху транспортного засобу й появи паразитного потоку рідини (робочої маси/тіла) у внутрішньому просторі рушія. Джерела інформації: 1. М.Г. Иванов "Безопорные двигатели космических аппаратов". Серия Relata Refero, Издат. ЛКИ, - М: 2008, 152 с (ISBN 978-5-382-01413-5). 2. О.А. Горшков "Холловские и ионные плазменные двигатели для космических аппаратов", Издат. Машиностроение, - М: 2008, 292 с. 3. Заявка ФРН (Німеччина) № 4413479, кл. F 03 Н 5/00, кл. В 64 G 1/40, опубл. 01.12.1994 р. - аналог. 4. Патент Франції № 2177153, кл. F 03 Н 5/00, опубл. 02.11.1973 р. - аналог. 5. Патент Російської Федерації (RU) № 98103193 від 20.02.1998 р. (опубл. бюл. № 36 від 27.02.1998 р.), МПК 5 F 03 G 7/00, Н 02 К 57/00 - аналог. 6. Заявка на патент Російської Федерації (RU) № 2002123072 (опубл. 20.06.2004 р.) - аналог. 7. Патент Російської Федерації (RU) № 94013559 (опубл. 20.12.1995 р.) - аналог. 8. Патент Російської Федерації (RU) № 2023203 (13) С1 від 15.11.1994 р., МПК 5 F 03 G 7/00, Н 02 К 57/00, В 64 G 1/40 - аналог. 9. Патент Російської Федерації (RU) № 2303850 (13) С1 від 27.07.2007 р., МПК (2007) F 03 G 7/00, Н 02 К 57/00 - аналог. 10. Исследование ракетных двигателей на жидком топливе // Пер. с англ. Под ред. В.А. Ильинского / М.: Издат. Мир, 1984, 355 с. - прототип. 11. Гильзин К.А. "Двигатели невиданных скоростей". - М.: Издат. Машиностроение, 1965. 334 с. 12. Чириков К.Ю. "Необычные двигатели". - М.: Издат. Знание, 1976, 64 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Спосіб переміщення транспортного засобу у просторі, при якому за допомогою рушія, розміщеного на транспортному засобі, формують направлений потік робочої маси/тіла, який створює тягу і призводить до зміни стану системи - руху центра мас системи по осі результуючої сили і, як слідство, руху безпосередньо транспортного засобу з рушієм в цілому в указаному напрямку, при цьому створюється і підтримується дисбаланс енергій - між постійною енергією зовні і енергією, що змінюється, всередині корпусу рушія, який відрізняється тим, що тягу створюють всередині корпусу рушія, що має замкнутий герметичний контур/систему, без викидання мас робочого тіла за межі зазначеного корпусу рушія, при цьому направлений потік робочої маси/тіла, який створює тягу рушія, не супроводжується втратою маси робочого тіла й практично не має обмеження часу дії. 2. Спосіб за п. 1, який відрізняється тим, що піднімальну силу й горизонтальну тягу створюють всередині корпусу рушія без впливу на зовнішнє середовище й незалежно від нього. 3. Спосіб за п. 1 та п. 2, який відрізняється тим, що потік робочої маси/тіла створюють в порожнині корпусу рушія з використанням приводу робочої маси/тіла. 4. Спосіб за п. 1, який відрізняється тим, що формування результуючої сили, що змушує рушій прискорюватися, зміну її напрямку й величини здійснюють за допомогою зміни напрямків сил, відповідно, від робочої маси/тіла, що переміщується всередині порожнини рушія, та швидкості потоку зазначеної робочої маси/тіла. 5 UA 87915 U 5 5. Спосіб за п. 1, який відрізняється тим, що як робочу масу/тіло використовують одну або декілька речовин різних за характеристиками щільності, при щільності однієї з речовин не менше щільності води. 6. Спосіб за п. 1 та п. 5, який відрізняється тим, що у випадку застосування двох типів речовин, одна речовина повинна мати щільність на кілька порядків більшу, ніж щільності іншої рідини робочої маси/тіла. 6 UA 87915 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюBykh Oleksandr Ivanovych
Автори російськоюБых Александр Иванович
МПК / Мітки
МПК: B64G 1/40, H02K 57/00, H02K 11/00, F03G 7/00
Мітки: переміщення, транспортного, спосіб, просторі, засобу
Код посилання
<a href="https://ua.patents.su/9-87915-sposib-peremishhennya-transportnogo-zasobu-u-prostori.html" target="_blank" rel="follow" title="База патентів України">Спосіб переміщення транспортного засобу у просторі</a>
Спосіб переміщення транспортного засобу білецького ю.о.

Номер патенту: 32724
Опубліковано: 26.05.2008
Автор: Білецький Юрій Олександрович
МПК: B63H 11/00
Мітки: транспортного, спосіб, білецького, засобу, переміщення, ю.о
Формула / Реферат:
1. Спосіб переміщення транспортного засобу за рахунок реактивної сили потоку текучого середовища, спрямованого в підводну зону в сторону, протилежну напряму руху, який відрізняється тим, що як текуче середовище використовують повітря, яке у вигляді повітряних бульок, підіймаючись потоком уверх по похилій поверхні транспортного засобу, утворює із водою реактивний потік.2. Спосіб за п. 1, який відрізняється тим, що потік повітря подають...
Паливний бак транспортного засобу з диференціюючим регулятором тиску в надрідинному просторі
Номер патенту: 85140
Опубліковано: 11.11.2013
Автори: Лісовал Анатолій Анатолійович, Краснокутська Зоя Ігорівна, Божок Аркадій Михайлович
МПК: B60K 15/00
Мітки: тиску, надрідинному, просторі, бак, регулятором, засобу, транспортного, диференціюючим, паливний
Формула / Реферат:
Паливний бак транспортного засобу з диференціюючим регулятором тиску в надрідинному просторі, що містить бак і акумулятор стисненого повітря транспортного засобу, систему повітропостачання двигуна внутрішнього згорання, першу пневматичну лінію, що сполучає надрідинний простір паливного бака зі штатною системою повітропостачання, другу з перепускним клапаном пневматичну лінію, що сполучає бак з акумулятором, і автоматичний клапанний механізм...
Гідропривід переміщення транспортного засобу
Номер патенту: 56605
Опубліковано: 25.01.2011
Автори: Сафар Ханлу Хуссейн, Таурит Тетяна Георгіївна, Буслов Володимир Кузьмович, Лисенко Володимир Сергійович
МПК: B62D 5/00
Мітки: гідропривід, переміщення, транспортного, засобу
Формула / Реферат:
Гідропривід переміщення транспортного засобу, що містить чотири гідродвигуни переміщення, три дільники потоку, чотирилінійні гідророзподільники, зворотні клапани, насос, клапан тиску, де виходи першого дільника потоку з'єднані з входами другого і третього дільників потоку, які через чотирилінійні гідророзподільники з'єднані з гідролініями високого, низького тиску гідродвигунів та гідробаком, який відрізняється тим, що у гідропривід введені...
Пристрій для переміщення у підземному просторі
Номер патенту: 5725
Опубліковано: 15.03.2005
Автори: КУЦИН МИХАЙЛО МИКОЛАЙОВИЧ, Древецький Володимир Володимирович, Кованько Володимир Володимирович
МПК: E02F 5/18
Мітки: пристрій, переміщення, підземному, просторі
Формула / Реферат:
Пристрій для переміщення у підземному просторі, що містить конічну носову частину, зв'язану за допомогою пружини, яка охоплена герметичною гофрованою еластичною оболонкою, з хвостовою розпірною частиною у вигляді порожнистого перфорованого циліндра, також герметично охопленого гофрованою еластичною оболонкою і з'єднаного з системою енергопідведення, який відрізняється тим, що система енергопідведення являє собою зовнішнє високовольтне...
Пристрій для переміщення у грунтовому просторі
Номер патенту: 10257
Опубліковано: 15.11.2005
Автори: Древецький Володимир Володимирович, КУЦИН МИХАЙЛО МИКОЛАЙОВИЧ, Кованько Володимир Володимирович
МПК: E02F 5/18
Мітки: просторі, грунтовому, пристрій, переміщення
Формула / Реферат:
Пристрій для переміщення у ґрунтовому просторі, що містить корпус, в якому розміщений вал, зв'язаний з двигуном, загострені підпружинену носову та хвостову частини, встановлені на опорах в пазах корпусу ролики, охоплені нескінченними еластичними стрічками, який відрізняється тим, що опори роликів підпружинені та шарнірно зв'язані тягами з передаючими зусилля елементами носової частини, вал реверсивного двигуна оснащений системою конічних...
Попередній патент: Безпечний кореневий бор
Наступний патент: Рідина для пожежогасіння 1,1,2,2,4,5,5,5-nonafluoro-4-(trifluoromenthyl)-3-pentanone
Випадковий патент: Ролик стрічкових конвеєрів