Силова головка
Номер патенту: 2573
Опубліковано: 15.06.2004
Автори: Гречка Андрій Іванович, Пестунов Володимир Михайлович, Крижанівський Володимир Андрійович

Завантажити PDF файл.
Формула / Реферат
1. Силоваголовка, що містить привід головного руху і автономний механізм подачі, яка відрізняється тим, що у приводі головного руху установлена циліндрична косозуба зубчаста передача, ширина вінця якої перевищує довжину ходу пінолі і розташована протилежно кінцевій передачі механізму подачі.
2. Силова головка за п. 1, яка відрізняється тим, що вона має датчик пружної деформації пінолі, що через порівняльний, програмний і управляючий пристрої з'єднаний з двигуном механізму подачі.
Текст
Силова головка відноситься до верстатобудування і, зокрема, до агрегатних верстатів і автоматичних ліній. Відома силова головка, що містить привід головного руху і автономний гідравлічний механізм подачі з ексцентричне розташованою віссю шпинделя відносно осі поршня гідроциліндра подачі. [1] Відома силова головка має підвищені вантажні втрати у механізмі подач і зменшену точність положення пінолі, що зменшує точність обробки. В основу корисної моделі поставлена задача зменшення вантажних втрат у механізмі подач і підвищення точності положення пінолі шляхом мінімізації деформацій у напрямних пінольного вузла при забезпеченні визначеності базування пінолі і необхідної жорсткості у стику піноль-напрямні. Поставлена задача вирішується тим, що у приводі головного руху установлена циліндрична косозуба зубчата передача, ширина вінця якої перевищує довжину ходу пінолі і розташована протилежно кінцевій передачі механізму подачі. За іншим варіантом поставлена задача вирішується тим, що силова головка оснащена датчиком пружної деформації пінолі, що через порівнюючий, програмний і управляючий пристрої з'єднаний з двигуном механізму подачі. Схема силової головки приведена на фіг. На фіг. показана силова головка, що містить привід головного приводу 1, що містить циліндричну косозубу зубчату передачу 2, ви хідна ланка якої з'єднана з шпинделем 3. Шпиндель 3 установлений на підшипниках у пінолі 4. Ширина вінця одного з коліс циліндричної косозубої зубчатої передачі 2 перевищує величину ходу пінолі 4. З піноллю 4 також з'єднана рейка зубчато-рейкової передачі 5 автономного механізму подачі 6. Інші елементи силової головки, що забезпечують її працездатність, але не вирішують поставленої задачі, на фіг. не показані. Принцип дії силової головки наступний. Привід головного руху забезпечує обертання шпинделя 3. При обертанні розташованої у ланцюзі головного приводу циліндричної косозубої зубчатої передачі 2 внаслідок похилого розташування зубців виникає сила Q, що направлена у сторону руху пінолі 4. Автономний механізм подачі 6 забезпечує прямолінійний рух пінолі 4 з заданою швидкістю за допомогою зубчато-рейкової передачі 5, в зчепленні якої виникає рушійна сила Р. Таким чином, рух пінолі забезпечується силами Р і Q, а кінематичні характеристики цього руху - параметрами автономного приводу подачі. Внаслідок ексцентричного (відносно осі пінолі 4) розташування сил Р і Q виникають моменти, що призводять до перекосу пінолі в напрямних. Величина сили Р залежить від параметрів зубчаторейкової передачі 5 і потужності, що передається по ланцюгу автономного механізму подачі 6. Величина сили Q залежить від параметрів циліндричної косозубої зубчатої передачі 2 і потужності, що передається по ланцюгу головного приводу 1. Регулюванням співвідношення між вказаними силами та їх ексцентриситетами досягають необхідних параметрів точності пінолі при забезпеченні сталості її базування і мінімізації вантажних втрат. Інший варіант силової головки містить датчик 7 пружної деформації пінолі, що через порівнюючий 8, програмний 9 і управляючий 10 пристрої з'єднаний з двигуном механізму подачі. Сигнал з датчика 7, що відповідає певній величині деформації напрямних пінолі 4, поступає на порівнюючий пристрій 8, куди одночасно надходить сигнал з програмного пристрою 9. Величина сигналу з програмного пристрою 9 відповідає величині допустимої деформації. Різниця між сигналами з датчика 7 і програмного пристрою 9 виділяється у порівнюючому пристрої 8 і надходить на управляючий пристрій 10, у якому перетворюється на управляючий сигнал двигуна автономного механізму подачі 6. Таким чином, при збільшенні деформації напрямних пінолі управляючий пристрій 10 подає сигнал на двигун автономного механізму подачі 6, внаслідок чого величина подачі пінолі зменшиться, що призведе до зменшення сил, які діють на піноль, і, відповідно, до зменшення деформацій напрямних пінолі. При зменшенні даних деформацій величина подачі пінолі відповідно буде збільшуватись. Закон залежності між деформаціями напрямних пінолі і величиною подачі задається програмним пристроєм 9. Таким чином, регулювання величини деформації напрямних пінолі відбувається у функції подачі пінолі. Економічна ефективність силової головки забезпечується за рахунок покращення параметрів точності при мінімально допустимих вантажних втрата х. Література: 1. Силовая головка: А.с. 1798119 А1 СССР МКИ В23Q37/00 / В.А. Крыжановский, В.М. Пестунов (СССР) Опубл. в Б.И., 1993, №8.- 2с.
ДивитисяДодаткова інформація
Автори англійськоюKryzhanivskyi Volodymyr Andriiovych, Pestunov Volodymyr Mykhailovych, Hrechka Andrii Ivanovych
Автори російськоюКрижанивский Владимир Андреевич, Пестунов Владимир Михайлович, Гречка Андрей Иванович
МПК / Мітки
МПК: B23Q 37/00
Код посилання
<a href="https://ua.patents.su/1-2573-silova-golovka.html" target="_blank" rel="follow" title="База патентів України">Силова головка</a>
Силова головка

Номер патенту: 66677
Опубліковано: 17.05.2004
Автори: Крижанівський Володимир Андрійович, Гречка Андрій Іванович, Пестунов Володимир Михайлович
МПК: B23Q 37/00
Формула / Реферат:
1. Силова головка, що містить привід головного руху і гідравлічний механізм подачі, шток і поршень якого з'єднані з піноллю, яка відрізняється тим, що поршень оснащений принаймні одним карманом гідростатичної опори, що розташована по циліндричній його поверхні і з'єднана каналами з напірною порожниною гідроциліндра робочої подачі, а площа карманів гідростатичної опори прийнята із співвідношення:
Силова головка
Номер патенту: 66678
Опубліковано: 17.05.2004
Автори: Пестунов Володимир Михайлович, Крижанівський Володимир Андрійович, Гречка Андрій Іванович
МПК: B23Q 37/00
Формула / Реферат:
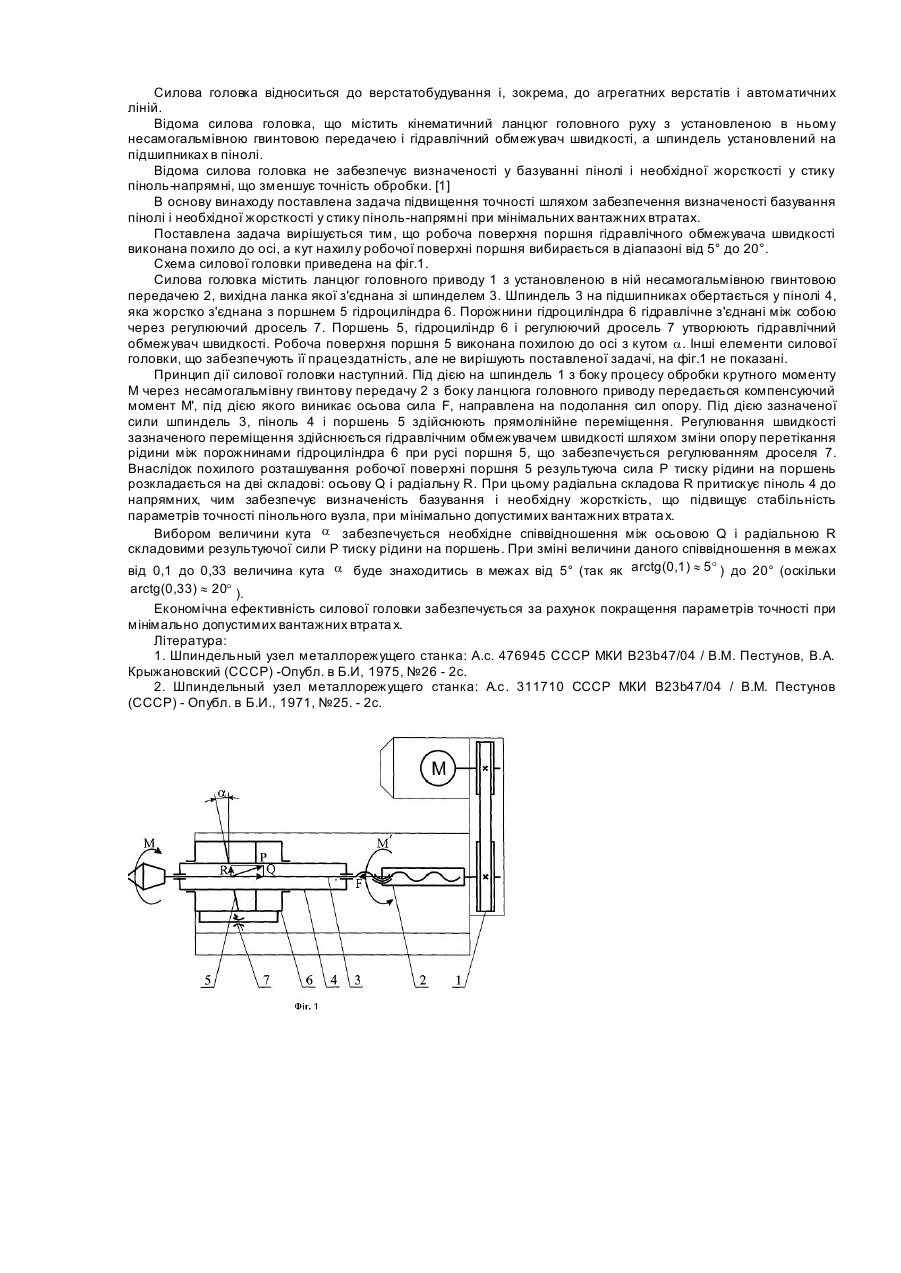
Силова головка, що містить кінематичний ланцюг головного руху з установленою в ньому несамогальмівною гвинтовою передачею і гідравлічний обмежувач швидкості, а шпиндель установлений на підшипниках в пінолі, яка відрізняється тим, що робоча поверхня поршня гідравлічного обмежувача швидкості виконана похило до осі, а кут нахилу робочої поверхні поршня вибирається в діапазоні від 5° до 20°.
Силова головка
Номер патенту: 54509
Опубліковано: 17.03.2003
Автори: Гречка Андрій Іванович, Пестунов Володимир Михайлович
МПК: B23Q 5/00, B23Q 37/00, B23Q 5/22
Формула / Реферат:
1. Силова головка, що містить корпус з встановленими у ньому на підшипниках шпинделем та механізмом поперечної подачі, що зв'язані з приводом, яка відрізняється тим, що механізм поперечної подачі містить циліндр, який через кругові напрямні з'єднано з переднім і заднім дисками, які зв'язані з приводом синхронного обертання і в яких циліндр розташований на кругових напрямних ексцентрично, причому в циліндрі також ексцентрично розташований...
Силова головка

Номер патенту: 31888
Опубліковано: 15.12.2000
Автори: Гречка Андрій Іванович, Пестунов Володимир Михайлович
МПК: B23Q 37/00, B23B 47/00
Текст:
...муфти 20 зафіксується зубчате колесо 12, а з ним і гвинт 10. Піноль 4 позбавлена можливості перекочуватися по гвинту 10, так як повзун З зафіксовано відносно каретки 2. Отже, піноль 4 при правому її обертанні гвинтовою нарізкою 7 буде загвинчуватися по гвинту 10, переміщуючись у повздовжньому напрямку назад. Для забезпечення вертикальної подачі каретки включаються гальмо 18 і муфти 16 і 20, гальмо 17 і муфта 19 відключаються....
Силова головка з автоматичною подачею
Номер патенту: 23432
Опубліковано: 02.06.1998
Автори: Бухов Лев Давидович, Ісаєв Віктор Петрович, Гнитько Володимир Іванович, Ковальчук Павло Васильович
МПК: B23B 47/00
Мітки: автоматичною, силова, подачею, головка
Формула / Реферат:
Силовая головка с автоматической подачей, содержащая двигатель с передачами, одна из которых связана с валом-втулкой, пинолью и шпинделем, отличающаяся тем, что вторая цепная передача связана с расположенным на вале-втулке цилиндрическим кулачком, установленным с возможностью взаимодействия с роликом, поводок которого расположен подвижно в продольном пазу вала-втулки и связан со шпинделем, имеющим возможность осевого перемещения.
Попередній патент: Автоматичний дозатор кормів
Наступний патент: Контейнер для збору сміття з рекламоносіями “лайт-бін”
Випадковий патент: Регульована фара