Пристрій для надання тілу рухливості і використання такого пристрою
Формула / Реферат
1. Пристрій для надання рухливості тілу, що містить приймальну платформу (1), рухому відносно нерухомої основи (20, 22), призначену для утримування людини, що тренується, в стоячому положенні, який відрізняється тим, що платформа (1) з'єднана з основою подвійним шарнірним з'єднанням, а також тим, що вона приводиться в коливальний рух відносно осі, що проходить, по суті, через її центр, за допомогою приводів (8, 9), кожний з яких з'єднаний шарнірним з'єднанням з одним валом (6), жорстко з'єднаним із згаданою платформою, при цьому згадані приводи (8, 9) шарнірно з'єднані з основою.
2. Пристрій за п. 1, який відрізняється тим, що платформа (1) шарнірно встановлена на рамі або жорсткій верхній арматурі (3), що задає першу, по суті, горизонтальну шарнірну вісь (А-А), при цьому згадана верхня рама (3) сама шарнірно встановлена на жорсткій арматурі (4) по другій, по суті, горизонтальній шарнірній осі (В-В), перпендикулярній першій шарнірній осі, при цьому згадана жорстка арматура з'єднана з основою (20, 22).
3. Пристрій за п. 2, який відрізняється тим, що платформа (1) забезпечена віссю або центральним валом (6), розташованим перпендикулярно відносно її площини, а також тим, що приводи (8, 9), в кількості двох, з'єднані з вільним кінцем згаданого вала за допомогою кардана (39, 40), при цьому напрямки роботи згаданих приводів, по суті, перпендикулярні один одному.
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що кожний з приводів (8, 9) утворений силовим циліндром, зокрема, електричним, точка кріплення якого до основи утворена шарнірним з'єднанням (10, 11) типу кардана.
5. Пристрій за п. 4, який відрізняється тим, що кожний з приводів утворений кульковим гвинтом (37, 38), виконаним з можливістю обертання в двох напрямках за допомогою безщіткового двигуна (12, 13), забезпеченого кодуючим пристроєм або ж редуктором.
6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що він містить, крім того, рукоятки і будь-який засіб для утримування з можливістю утримувати людину, яка піддається лікуванню або тренуванню, за допомогою верхніх кінцівок, враховуючи порушення рівноваги, яким вона піддається внаслідок коливань платформи, на якій вона знаходиться.
7. Пристрій за будь-яким з пп. 1-6, за винятком способів терапевтичного лікування людського тіла, який відрізняється тим, що він виконаний таким чином, що амплітуда і різні коливальні рухи, передані платформі (1), регулюються по певних програмах, виконаних з можливістю включати в себе режим випадкових коливань.
8. Пристрій за будь-яким з пп. 1-6, за винятком способів терапевтичного лікування людського тіла, який відрізняється тим, що він виконаний таким чином, що амплітуда і різні коливальні рухи, передані платформі (1) в режимі реального часу, здійснюються по команді джойстика з можливістю маніпулювання ним людиною, що забезпечує контроль згаданого надання рухливості тілу, і зокрема, практикуючим лікарем.
Текст
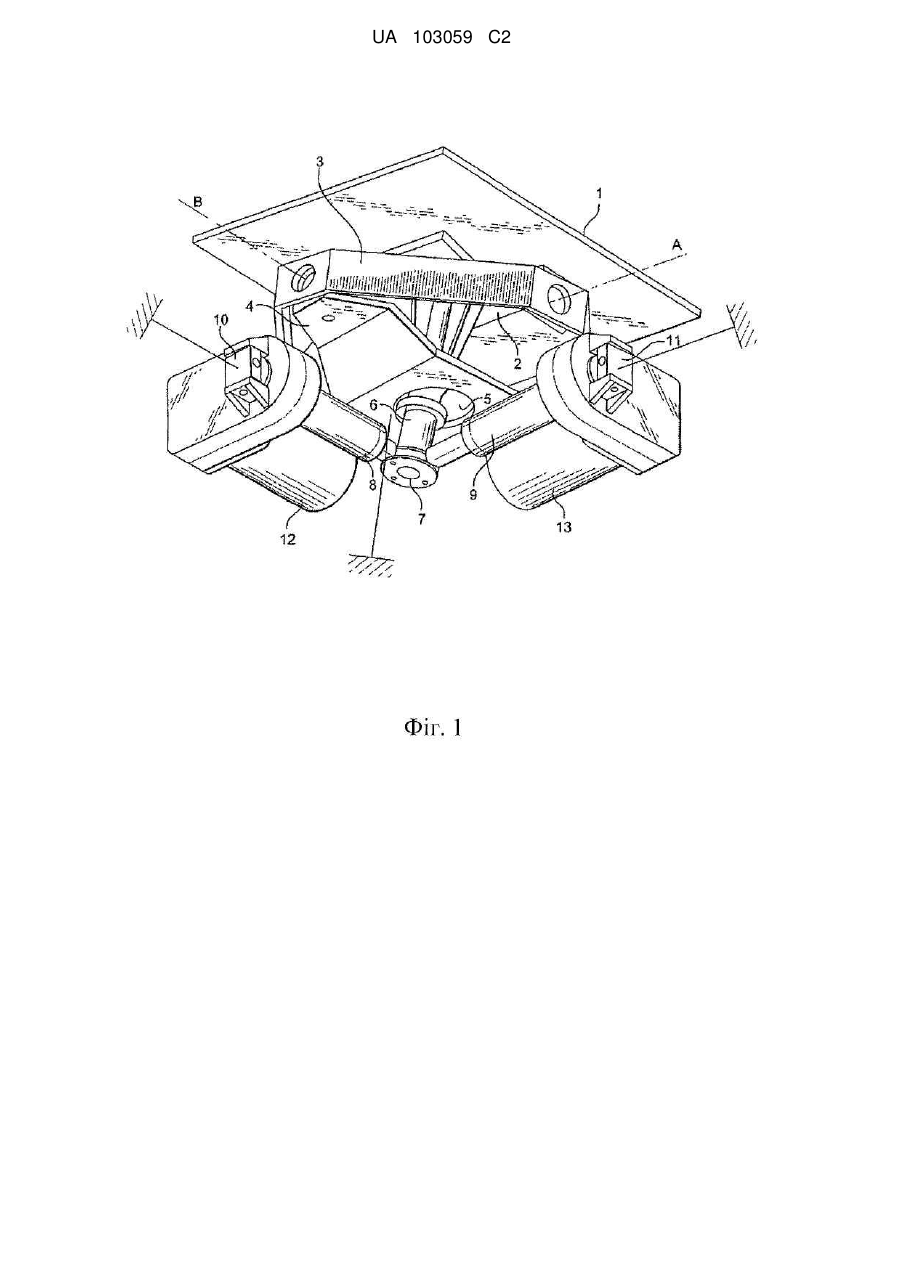
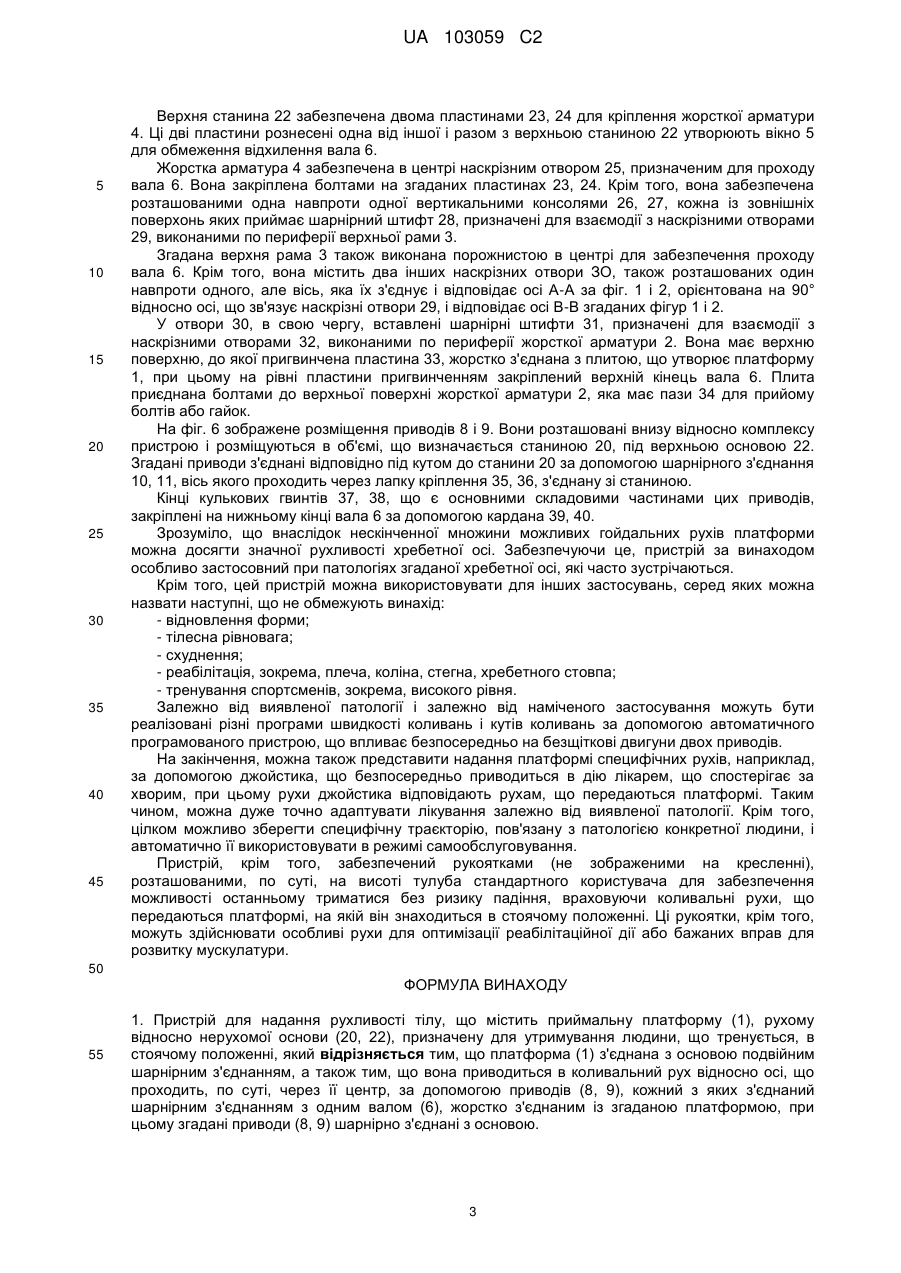
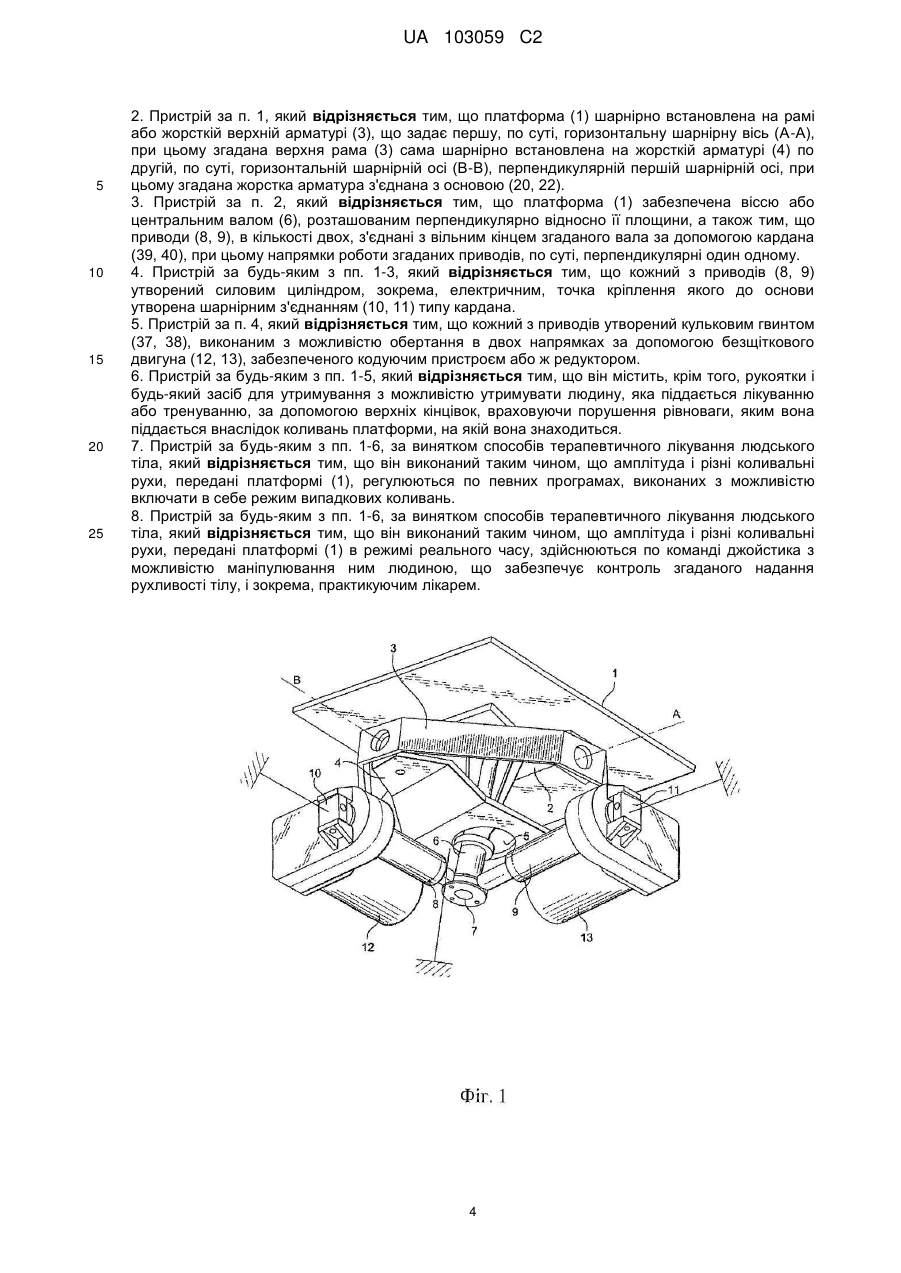
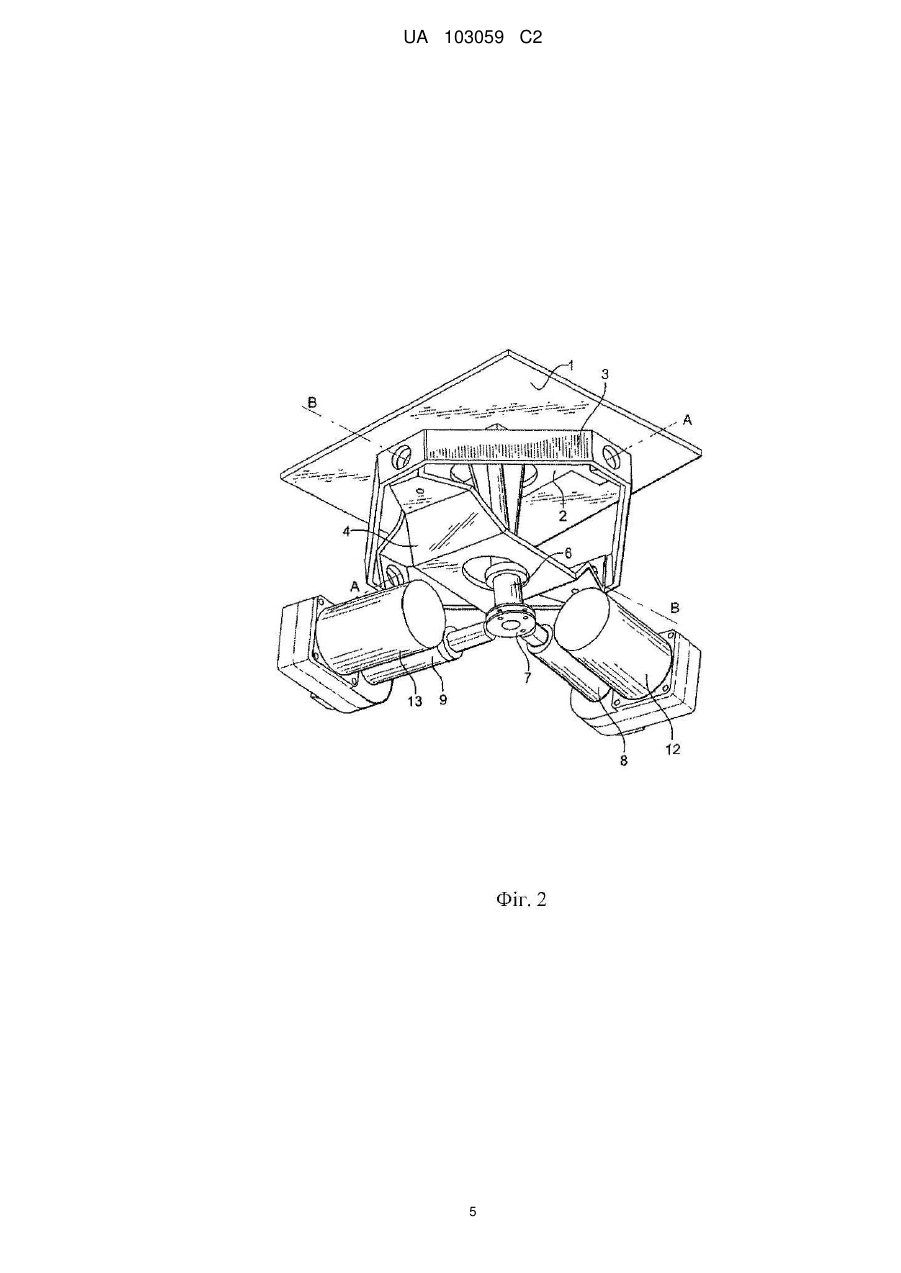
Реферат: Пристрій для надання рухливості людському тілу містить приймальну платформу (1), рухому відносно нерухомої основи, призначену для утримування людини, що тренується, в стоячому положенні. Платформа (1) з'єднана з основою подвійним шарнірним з'єднанням і приводиться в коливальний рух відносно осі, що проходить, по суті, через центр, за допомогою двох приводів (8, 9), кожний з яких з'єднаний шарнірним з'єднанням з валом (6), жорстко з'єднаним з платформою, при цьому згадані приводи (8, 9) самі шарнірно з'єднані з основою. UA 103059 C2 (12) UA 103059 C2 UA 103059 C2 5 10 15 20 25 30 35 40 45 50 55 60 ГАЛУЗЬ ТЕХНІКИ, ДО ЯКОЇ НАЛЕЖИТЬ ВИНАХІД Винахід стосується пристрою, призначеного для забезпечення рухливості тіла людини і, особливо, для приведення в рух хребетної осі, артикуляції таза і нижніх кінцівок відносно цієї хребетної осі. Винахід, таким чином, є частиною галузі досліджень такої рухливості тіла за допомогою використання платформи або пластини, виконаної з можливістю коливатися по множині осей, що проходять через її центр, причому такі різні коливання можуть здійснюватися випадковим чином. ВІДОМИЙ РІВЕНЬ ТЕХНІКИ На сьогоднішній день запропоновані різні апарати для здійснення операцій корекції і реабілітації загальної біомеханіки. їх призначенням більше є, зокрема, забезпечення м'язових тренувань спортсменів. Ці апарати містять звичайно платформу, здатну здійснювати коливання відносно центрального опорного шарніра, описану, наприклад, в документах US-A-2827894 і US-A4290601. Рух платформи приводить до втрати рівноваги людиною, що знаходиться на ній, що викликає реакцію з боку людини і забезпечує шукане надання рухливості різним біомеханічним елементам, зокрема, хребетному стовпу, тазовому поясу кінцівок і суглобам. У документі ЕР 1023111 описаний, наприклад, також пристрій, в якому платформа здійснює одночасний обертальний рух і коливальний рух. Іншими словами, кінематика пристрою, описаного в цьому документі, обмежена обертальним коливанням з регульованими амплітудою і швидкістю. Однак такий пристрій виявляється особливо складним у виготовленні і, крім того, коливальні рухи обмежені амплітудою і самою конструкцією, при цьому випадковий характер коливань не може бути одержаний по тих же причинах. У документі WO 2007/141429 запропонований, наприклад, також пристрій типу, що розглядається, але який також має обмежені ступені свободи коливань через тип супорта і привід платформи, якою він забезпечений, що зменшує можливості та ефективність лікування через відсутність будь-якого випадкового характеру коливань. Винахід пропонує пристрій типу, що розглядається, який надає платформі множину ступенів свободи коливання, тобто, здатний дозволити платформі здійснювати множину можливих гойдань відносно осі, що проходить, по суті, через її центр. З цієї множини витікає можливість здійснювати дискретні гойдання і надавати коливанню випадковий характер, сприяючий, зокрема, реабілітації, а також тренуванням, необхідним спортсменам. СУТЬ ВИНАХОДУ Винахід пропонує пристрій для надання тілу рухливості, що містить приймальну платформу, рухому відносно нерухомої основи, призначену для утримування людини, що тренується, в стоячому положенні. Відповідно до винаходу платформа з'єднана з основою подвійним шарнірним з'єднанням і приводиться в коливальний рух відносно осі, що проходить, по суті, через її центр, за допомогою приводів, з'єднаних кожен шарнірним з'єднанням з одним і тим же валом, жорстко з'єднаним із згаданою платформою, при цьому самі згадані приводи шарнірно з'єднані з основою. Зокрема, платформа шарнірно встановлена на верхній рамі, що задає першу, по суті горизонтальну шарнірну вісь, при цьому сама рама шарнірно встановлена на основі по другій шарнірній осі, по суті, горизонтальній і перпендикулярній згаданій першій осі. Згадана платформа забезпечена віссю або центральним валом, розміщеним перпендикулярно відносно її площини, а приводи, в кількості двох, жорстко з'єднані з вільним кінцем згаданого вала за допомогою кардана, при цьому напрямки роботи згаданих приводів, по суті, перпендикулярні один одному. Кожен з цих приводів утворений силовим циліндром, зокрема, електричним, точка кріплення якого до станини утворена шарнірним зв'язком. Переважно, пристрій для надання рухливості тілу за винаходом об'єднаний з рукоятками і, в загальному випадку, будь-яким засобом для затримування, що дозволяє людині, яка піддається лікуванню або тренуванню, триматися за допомогою верхніх кінцівок, враховуючи порушення рівноваги, яким він піддається при коливаннях платформи, на якій він знаходиться. Винахід спрямований також на використання пристрою для надання рухливості тілу за винаходом, відповідно до якого амплітуда і різні коливальні рухи, що прикладаються до платформи, регулюються за певними програмами, виконаними з можливістю включати в себе режим випадкових коливань. Альтернативно, коливальні рухи платформи здійснюються в режимі реального часу по команді джойстика, керованого людиною, що забезпечує контроль згаданого надання 1 UA 103059 C2 5 10 15 20 25 30 35 40 45 50 55 рухливості тілу, і, зокрема, лікарем-фахівцем. У цьому випадку відповідь платформи є негайною і прямою і точно слідує дії лікаря-фахівця за допомогою команд, що подаються за допомогою джойстика. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Надалі винахід пояснюється нижченаведеним описом, що не являється обмежувальним, з посиланнями на супроводжуючі креслення, на яких: Фіг. 1 і 2 схематично зображують в ізометрії вигляди у двох різних напрямках принципу роботи пристрою для надання рухливості тілу за винаходом. Фіг. 3 схематично зображує в ізометрії в розібраному вигляді варіант здійснення за винаходом. Фіг. 4 і 5 схематично зображують два вигляди в сагітальному перерізі пристрою за винаходом в двох перпендикулярних одна відносно одної площинах. Фіг. 6 схематично зображує пристрій за винаходом на вигляді знизу. ДОКЛАДНИЙ ОПИС ВИНАХОДУ На фіг. 1 і 2 зображений вигляд в ізометрії, що схематично ілюструє принцип роботи пристрою за винаходом. По суті, пристрій містить платформу 1, схематично представлену квадратною формою, але яка може мати будь-яку іншу форму, зокрема, круглу або овальну. Платформа 1 шарнірно встановлена за допомогою жорсткої арматури 2 на верхній жорсткій рамі 3 по горизонтальній шарнірній осі А-А, пунктирно показаній на фіг. 1. Іншими словами, зв'язок платформи 1 з верхньою рамою є шарнірним з'єднанням, при цьому згадана платформа 1 встановлена з можливістю повороту відносно згаданої осі А-А. Отже, верхня рама 3 сама шарнірно встановлена на жорсткій арматурі 4, з'єднаній з основою пристрою, по шарнірній осі В-В, показаній пунктирною лінією, також горизонтальною і орієнтованою перпендикулярно відносно осі А-А. Іншими словами, платформа 1 з'єднана з основою подвійним шарнірним з'єднанням. З урахуванням цього подвійного шарнірного з'єднання платформа 1 здатна мати невизначену кількість напрямків відносно її вихідної горизонтальної площини. Для уточнення можливості забезпечення цієї множини напрямків і, отже, передачі людині, що встала на згадану платформу, нескінченної множини коливальних рухів для примусової зміни його рівноваги і забезпечення необхідних різних рухів для надання рухливості згадана платформа 1 продовжується вниз валом 6, по суті, жорстко з'єднаним з центром платформи будь-якими прийнятними засобами, наприклад, болтами або тому подібним. Таким чином, в описаному прикладі вал 6 орієнтований перпендикулярно площині платформи 1. Вільний кінець цього вала 6, тобто, протилежний платформі 1, з'єднаний шарнірним з'єднанням з двома приводами 8 і 9, в цьому випадку утвореними електричними силовими циліндрами. Згадані приводи самі з'єднані зі станиною за допомогою шарнірного з'єднання, відповідно 10 і 11, і в цьому випадку забезпечені карданами, що забезпечують згаданим приводам певні відхилення в горизонтальній площині. Зокрема, ці приводи 8 і 9 утворені кожен кульковим гвинтом, здатним повертатися в двох напрямках за допомогою безщіткового двигуна, відповідно 12 і 13, забезпеченого кодуючим пристроєм, або ж, при необхідності, редуктором. Вільний кінець кожного з гвинтів з'єднаний з нижнім вільним кінцем 7 вала 6 за допомогою кардана для забезпечення кутового переміщення кінця гвинта відносно вільного кінця 7 вала 6. Два приводи 8 і 9 спрямовані перпендикулярно один одному, коли платформа знаходиться в положенні спокою, тобто, плоско або горизонтально. Звідси зрозуміло, що, впливаючи, з одного боку, на відповідні швидкості обертання безщіткових двигунів 12, 13, і, з іншого боку, на напрямки обертання гвинтів, можна надати валу 6 і, відповідно, платформі 1, яка з ним безпосередньо пов'язана, будь-який можливий тип напрямку. Відхилення вала 6, однак, обмежене конструкцією і в цьому випадку вікном 5, виконаним в жорсткій арматурі 4. Поставленою метою не є забезпечення сильного нахилу платформи, але надання останній необмеженої і невизначеної кількості напрямків і, таким чином, збільшення кількості можливих коливань відносно її центральної осі 6. На фіг. 3-6 представлені різні варіанти здійснення пристрою за винаходом. Таким чином, пристрій утворений станиною 20, розміщеною на підлозі на ніжках 21, в цьому випадку на шести, переважно, забезпечених нековзним покриттям. Станина 20 містить зверху основу 22, яка жорстко з нею з'єднана, наприклад, зварюванням. 2 UA 103059 C2 5 10 15 20 25 30 35 40 45 Верхня станина 22 забезпечена двома пластинами 23, 24 для кріплення жорсткої арматури 4. Ці дві пластини рознесені одна від іншої і разом з верхньою станиною 22 утворюють вікно 5 для обмеження відхилення вала 6. Жорстка арматура 4 забезпечена в центрі наскрізним отвором 25, призначеним для проходу вала 6. Вона закріплена болтами на згаданих пластинах 23, 24. Крім того, вона забезпечена розташованими одна навпроти одної вертикальними консолями 26, 27, кожна із зовнішніх поверхонь яких приймає шарнірний штифт 28, призначені для взаємодії з наскрізними отворами 29, виконаними по периферії верхньої рами 3. Згадана верхня рама 3 також виконана порожнистою в центрі для забезпечення проходу вала 6. Крім того, вона містить два інших наскрізних отвори ЗО, також розташованих один навпроти одного, але вісь, яка їх з'єднує і відповідає осі А-А за фіг. 1 і 2, орієнтована на 90° відносно осі, що зв'язує наскрізні отвори 29, і відповідає осі В-В згаданих фігур 1 і 2. У отвори 30, в свою чергу, вставлені шарнірні штифти 31, призначені для взаємодії з наскрізними отворами 32, виконаними по периферії жорсткої арматури 2. Вона має верхню поверхню, до якої пригвинчена пластина 33, жорстко з'єднана з плитою, що утворює платформу 1, при цьому на рівні пластини пригвинченням закріплений верхній кінець вала 6. Плита приєднана болтами до верхньої поверхні жорсткої арматури 2, яка має пази 34 для прийому болтів або гайок. На фіг. 6 зображене розміщення приводів 8 і 9. Вони розташовані внизу відносно комплексу пристрою і розміщуються в об'ємі, що визначається станиною 20, під верхньою основою 22. Згадані приводи з'єднані відповідно під кутом до станини 20 за допомогою шарнірного з'єднання 10, 11, вісь якого проходить через лапку кріплення 35, 36, з'єднану зі станиною. Кінці кулькових гвинтів 37, 38, що є основними складовими частинами цих приводів, закріплені на нижньому кінці вала 6 за допомогою кардана 39, 40. Зрозуміло, що внаслідок нескінченної множини можливих гойдальних рухів платформи можна досягти значної рухливості хребетної осі. Забезпечуючи це, пристрій за винаходом особливо застосовний при патологіях згаданої хребетної осі, які часто зустрічаються. Крім того, цей пристрій можна використовувати для інших застосувань, серед яких можна назвати наступні, що не обмежують винахід: - відновлення форми; - тілесна рівновага; - схуднення; - реабілітація, зокрема, плеча, коліна, стегна, хребетного стовпа; - тренування спортсменів, зокрема, високого рівня. Залежно від виявленої патології і залежно від наміченого застосування можуть бути реалізовані різні програми швидкості коливань і кутів коливань за допомогою автоматичного програмованого пристрою, що впливає безпосередньо на безщіткові двигуни двох приводів. На закінчення, можна також представити надання платформі специфічних рухів, наприклад, за допомогою джойстика, що безпосередньо приводиться в дію лікарем, що спостерігає за хворим, при цьому рухи джойстика відповідають рухам, що передаються платформі. Таким чином, можна дуже точно адаптувати лікування залежно від виявленої патології. Крім того, цілком можливо зберегти специфічну траєкторію, пов'язану з патологією конкретної людини, і автоматично її використовувати в режимі самообслуговування. Пристрій, крім того, забезпечений рукоятками (не зображеними на кресленні), розташованими, по суті, на висоті тулуба стандартного користувача для забезпечення можливості останньому триматися без ризику падіння, враховуючи коливальні рухи, що передаються платформі, на якій він знаходиться в стоячому положенні. Ці рукоятки, крім того, можуть здійснювати особливі рухи для оптимізації реабілітаційної дії або бажаних вправ для розвитку мускулатури. 50 ФОРМУЛА ВИНАХОДУ 55 1. Пристрій для надання рухливості тілу, що містить приймальну платформу (1), рухому відносно нерухомої основи (20, 22), призначену для утримування людини, що тренується, в стоячому положенні, який відрізняється тим, що платформа (1) з'єднана з основою подвійним шарнірним з'єднанням, а також тим, що вона приводиться в коливальний рух відносно осі, що проходить, по суті, через її центр, за допомогою приводів (8, 9), кожний з яких з'єднаний шарнірним з'єднанням з одним валом (6), жорстко з'єднаним із згаданою платформою, при цьому згадані приводи (8, 9) шарнірно з'єднані з основою. 3 UA 103059 C2 5 10 15 20 25 2. Пристрій за п. 1, який відрізняється тим, що платформа (1) шарнірно встановлена на рамі або жорсткій верхній арматурі (3), що задає першу, по суті, горизонтальну шарнірну вісь (А-А), при цьому згадана верхня рама (3) сама шарнірно встановлена на жорсткій арматурі (4) по другій, по суті, горизонтальній шарнірній осі (В-В), перпендикулярній першій шарнірній осі, при цьому згадана жорстка арматура з'єднана з основою (20, 22). 3. Пристрій за п. 2, який відрізняється тим, що платформа (1) забезпечена віссю або центральним валом (6), розташованим перпендикулярно відносно її площини, а також тим, що приводи (8, 9), в кількості двох, з'єднані з вільним кінцем згаданого вала за допомогою кардана (39, 40), при цьому напрямки роботи згаданих приводів, по суті, перпендикулярні один одному. 4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що кожний з приводів (8, 9) утворений силовим циліндром, зокрема, електричним, точка кріплення якого до основи утворена шарнірним з'єднанням (10, 11) типу кардана. 5. Пристрій за п. 4, який відрізняється тим, що кожний з приводів утворений кульковим гвинтом (37, 38), виконаним з можливістю обертання в двох напрямках за допомогою безщіткового двигуна (12, 13), забезпеченого кодуючим пристроєм або ж редуктором. 6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що він містить, крім того, рукоятки і будь-який засіб для утримування з можливістю утримувати людину, яка піддається лікуванню або тренуванню, за допомогою верхніх кінцівок, враховуючи порушення рівноваги, яким вона піддається внаслідок коливань платформи, на якій вона знаходиться. 7. Пристрій за будь-яким з пп. 1-6, за винятком способів терапевтичного лікування людського тіла, який відрізняється тим, що він виконаний таким чином, що амплітуда і різні коливальні рухи, передані платформі (1), регулюються по певних програмах, виконаних з можливістю включати в себе режим випадкових коливань. 8. Пристрій за будь-яким з пп. 1-6, за винятком способів терапевтичного лікування людського тіла, який відрізняється тим, що він виконаний таким чином, що амплітуда і різні коливальні рухи, передані платформі (1) в режимі реального часу, здійснюються по команді джойстика з можливістю маніпулювання ним людиною, що забезпечує контроль згаданого надання рухливості тілу, і зокрема, практикуючим лікарем. 4 UA 103059 C2 5 UA 103059 C2 6 UA 103059 C2 7 UA 103059 C2 Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюApparatus for mobilization of the body, and use of such an apparatus
Автори російськоюFuster, Arnaud
МПК / Мітки
МПК: A61H 1/00, A63B 22/00
Мітки: пристрою, пристрій, тілу, такого, рухливості, використання, надання
Код посилання
<a href="https://ua.patents.su/10-103059-pristrijj-dlya-nadannya-tilu-rukhlivosti-i-vikoristannya-takogo-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для надання тілу рухливості і використання такого пристрою</a>
Пристрій для селективного розділення твердих порошкових матеріалів по гранулометричному складу з використанням відцентрової сили і спосіб використання такого пристрою
Номер патенту: 102875
Опубліковано: 27.08.2013
Автор: Девро Себастьян
МПК: B07B 4/04, B07B 11/00, B07B 7/083
Мітки: матеріалів, відцентрової, порошкових, складу, такого, сили, використанням, розділення, пристрою, селективного, пристрій, гранулометричному, твердих, використання, спосіб
Формула / Реферат:
1. Пристрій (1) для розділення твердих порошкових матеріалів по гранулометричному складу з використанням відцентрової сили, придатний до розділення матеріалів на дві фракції - дрібну фракцію і крупну фракцію - який містить:корпус (6),циліндричний ротор (2), який здатен обертатися відносно згаданого корпуса на вертикальній осі, розташованій всередині згаданого корпуса, оснащений лопатями (3), розташованими на його...
Спосіб надання рухливості елементам рекламно-сувенірного виробу
Номер патенту: 55419
Опубліковано: 10.12.2010
Автор: Потопаєв Ростислав Павлович
МПК: G09F 21/00, G09F 11/00
Мітки: виробу, надання, рекламно-сувенірного, спосіб, елементам, рухливості
Формула / Реферат:
1. Спосіб надання рухливості елементам рекламно-сувенірного виробу, що включає встановлення приводу для поступального та зворотного руху елементів, який відрізняється тим, що елементам виробу надають руху шляхом задавання приводом постійного зворотно-поступального руху через зубчастий механізм, зубчасті елементи якого співвісно з'єднані з елементами виробу.2. Спосіб за п. 1, який відрізняється тим, що зубчастий механізм виконують у...
Підйомний механізм для підйому електричного пристрою з підмотуванням кабелю такого пристрою
Номер патенту: 101088
Опубліковано: 25.02.2013
Автори: Фєдосовскій Міхаіл Євгєньєвіч, Алєксанін Сєргєй Андрєєвіч, Сєлягін Іван Сергєєвіч, Ніколаєв Вячєслав Вікторовіч
МПК: B66D 1/02, B66D 1/16, B66D 1/26, B66D 1/14
Мітки: кабелю, підйому, підмотуванням, такого, пристрою, механізм, електричного, підйомний
Формула / Реферат:
1. Підйомний механізм для підйому електричного пристрою, який містить канатний барабан для намотування вантажонесучого каната, жорстко закріплений на валу канатного барабана, кабельний барабан для намотування кабелю електричного пристрою, жорстко закріплений на валу кабельного барабана, опори канатного барабана, у яких з можливістю обертання встановлений вал канатного барабана, і опори кабельного барабана, у яких з можливістю обертання...
Захисний пристрій на основі фотонного кристала і спосіб формування такого пристрою
Номер патенту: 95565
Опубліковано: 10.08.2011
Автор: Уайтман Роберт
МПК: B42D 15/10, B42D 15/00, B29D 11/00
Мітки: такого, захисний, фотонного, спосіб, кристала, формування, пристрій, основі, пристрою
Формула / Реферат:
1. Спосіб формування оптично змінного захисного пристрою, який полягає в тому, що:забезпечують матеріал фотонного кристала іздійснюють над цим матеріалом процес, який викликає деформацію матеріалу таким чином, що формується перша зона, для якої падаюче світло, що приймається матеріалом кристала, вибірково відбивається або пропускається для створення першого оптично змінного ефекту, і друга зона, для якої падаюче світло, що...
Пристрій для автоматичного керування електромережею і моторний привід для такого пристрою
Номер патенту: 75916
Опубліковано: 15.06.2006
Автори: Дональ Дітер, Фірекк Карстен, Ерміш Йохен
МПК: H02P 13/00, H01F 29/00, H02P 7/18, G05F 1/147
Мітки: електромережею, пристрою, пристрій, керування, моторний, такого, автоматичного, привід
Формула / Реферат:
1. Пристрій для автоматичного керування електромережею, який містить трансформатор зі ступеневим регулюванням напруги, регулювальна обмотка якого має відводи, і оснащений моторним приводом ступеневий перемикач, виконаний з можливістю безрозривного перемикання відводів регулювальної обмотки під навантаженням, розміщений на трансформаторі зі ступеневим регулюванням напруги вимірювальний перетворювач напруги для реєстрації дійсного значення...
Попередній патент: Стабільний за розмірами пакувальний контейнер та спосіб його одержання
Наступний патент: Кондитерська композиція з начинкою
Випадковий патент: Конструкція швидкозмінних п'ят та підп'ятників