Керований симетричний дебалансний вібропривод
Номер патенту: 113133
Опубліковано: 12.12.2016
Автори: Чубик Роман Васильович, Ярошенко Леонід Вікторович, Зрайло Назар Михайлович
Формула / Реферат
Керований симетричний дебалансний вібропривод, що складається із корпусу, в якому на підшипниках встановлено приводний вал з двома діаметрально протилежно зустрічно напрямленими канавками, що мають довжину, рівну половині кроку гвинта, і розміщеним на валу нерухомим і рухомим дебалансами та механізмом регулювання положення рухомого дебалансу, що виконаний у вигляді шпонок, розміщених в канавках і зв'язаних з рухомим дебалансом, який відрізняється тим, що на приводному валу встановлено два нерухомих відносно нього дебаланси, центри мас яких і вісь приводного вала лежать в одній площині, а по обидва боки від кожного нерухомого дебалансу виконано по парі діаметрально протилежних зустрічно напрямлених канавок та розміщено по парі рухомих дебалансів з механізмами регулювання їх положення, причому, механізми регулювання положення рухомих дебалансів жорстко кінематично зв'язані у кожній парі та між парами і отримують переміщення вздовж осі приводного вала від механізму гвинтової подачі з приводом від крокового двигуна.
Текст
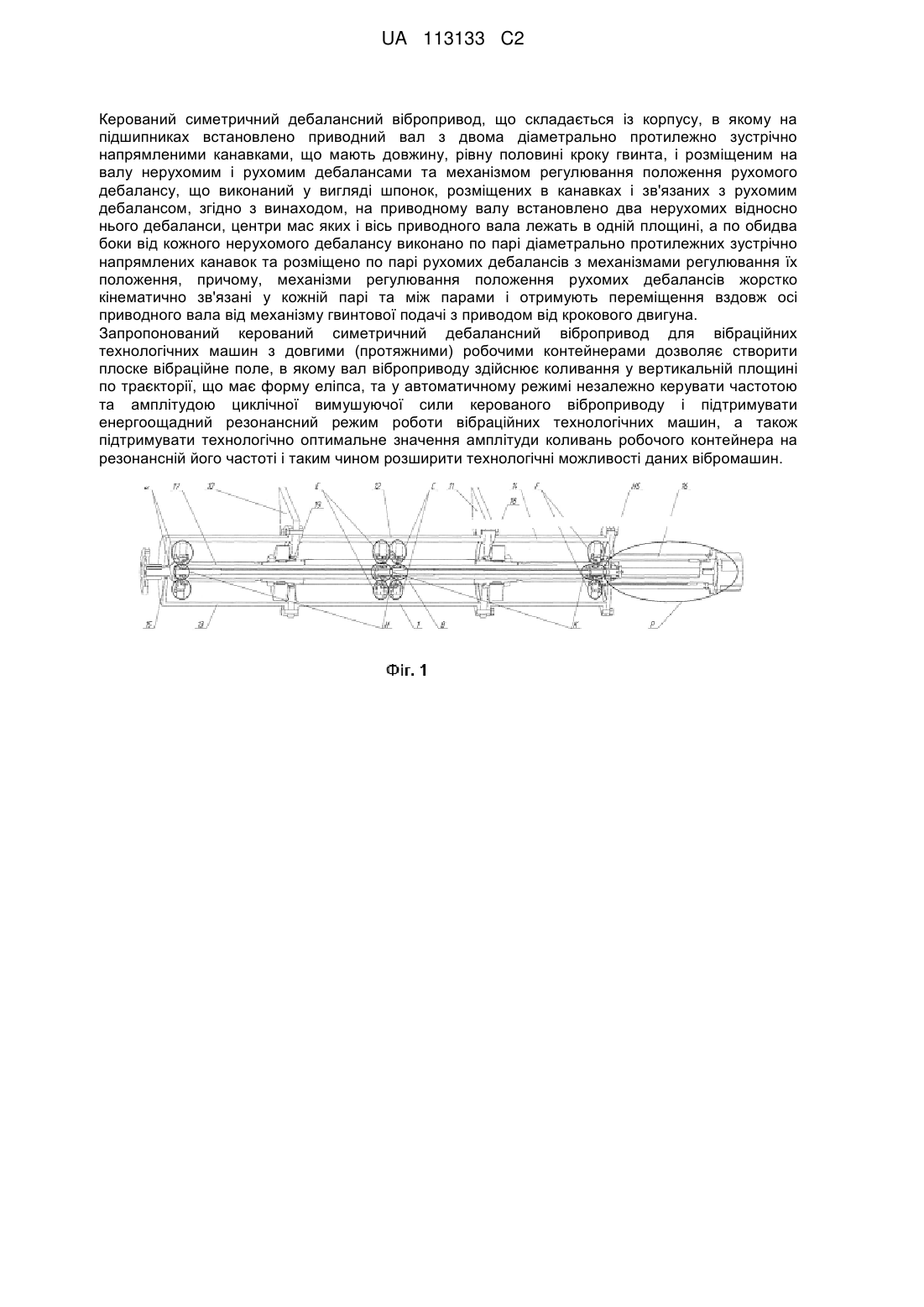
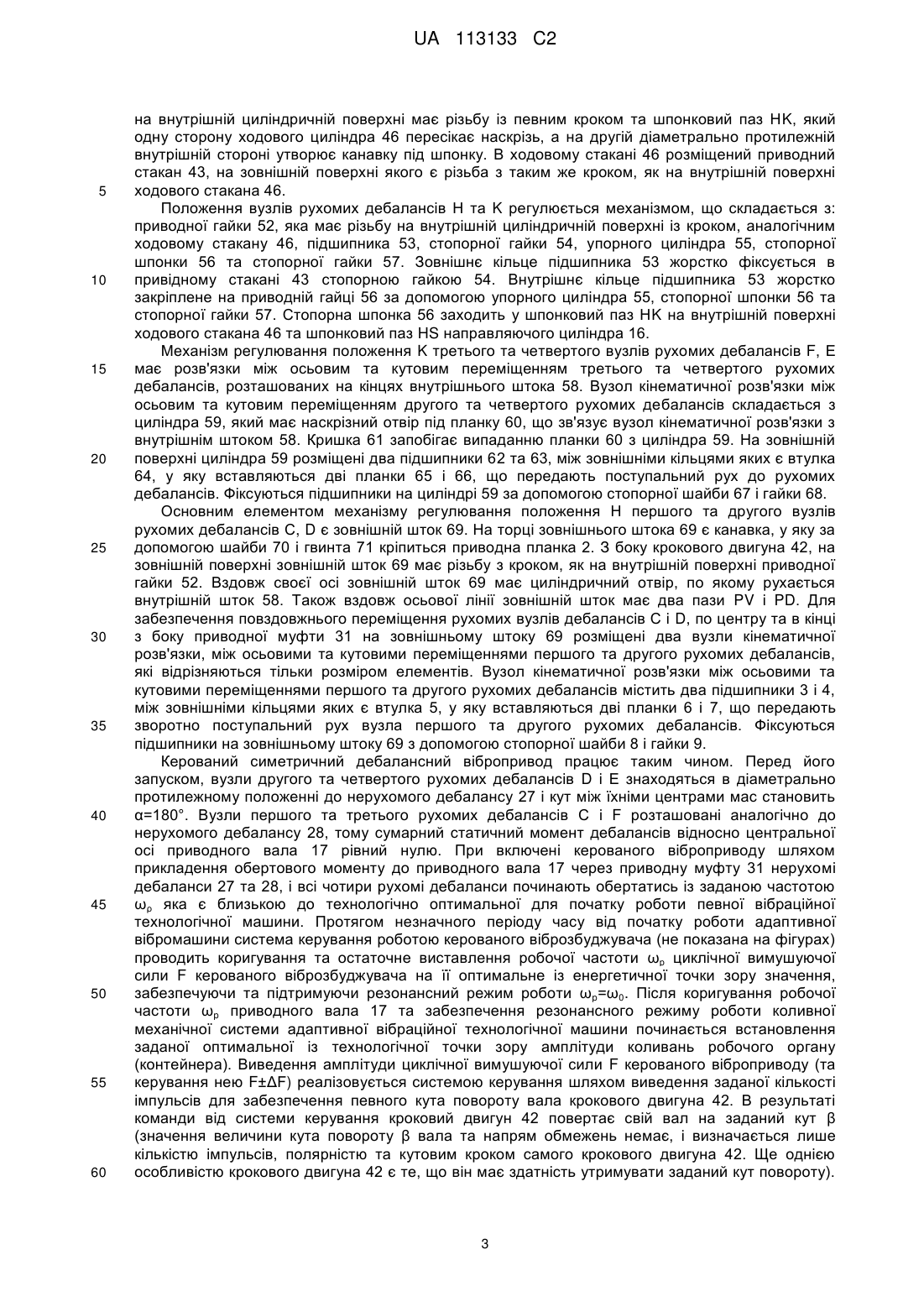
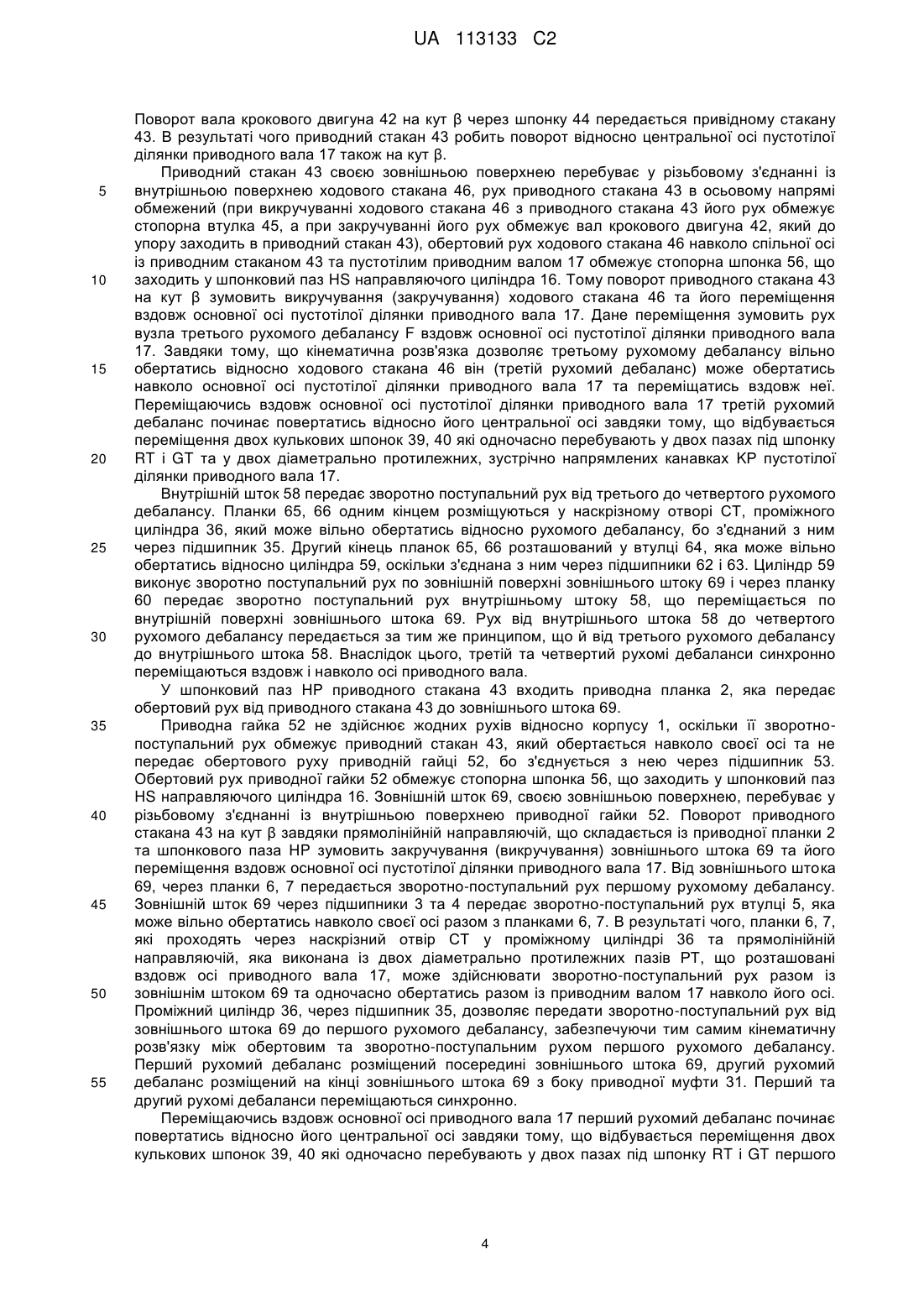
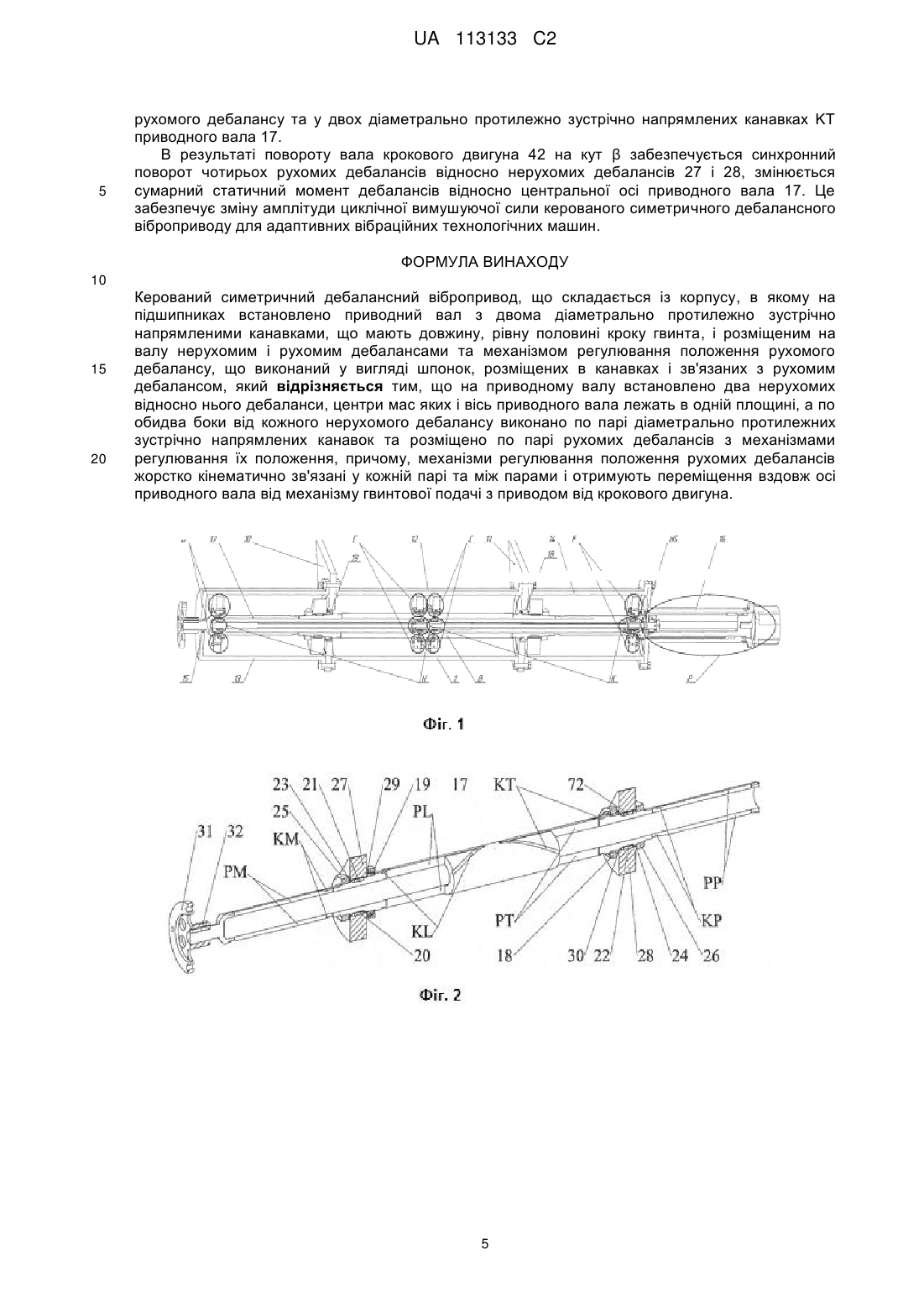
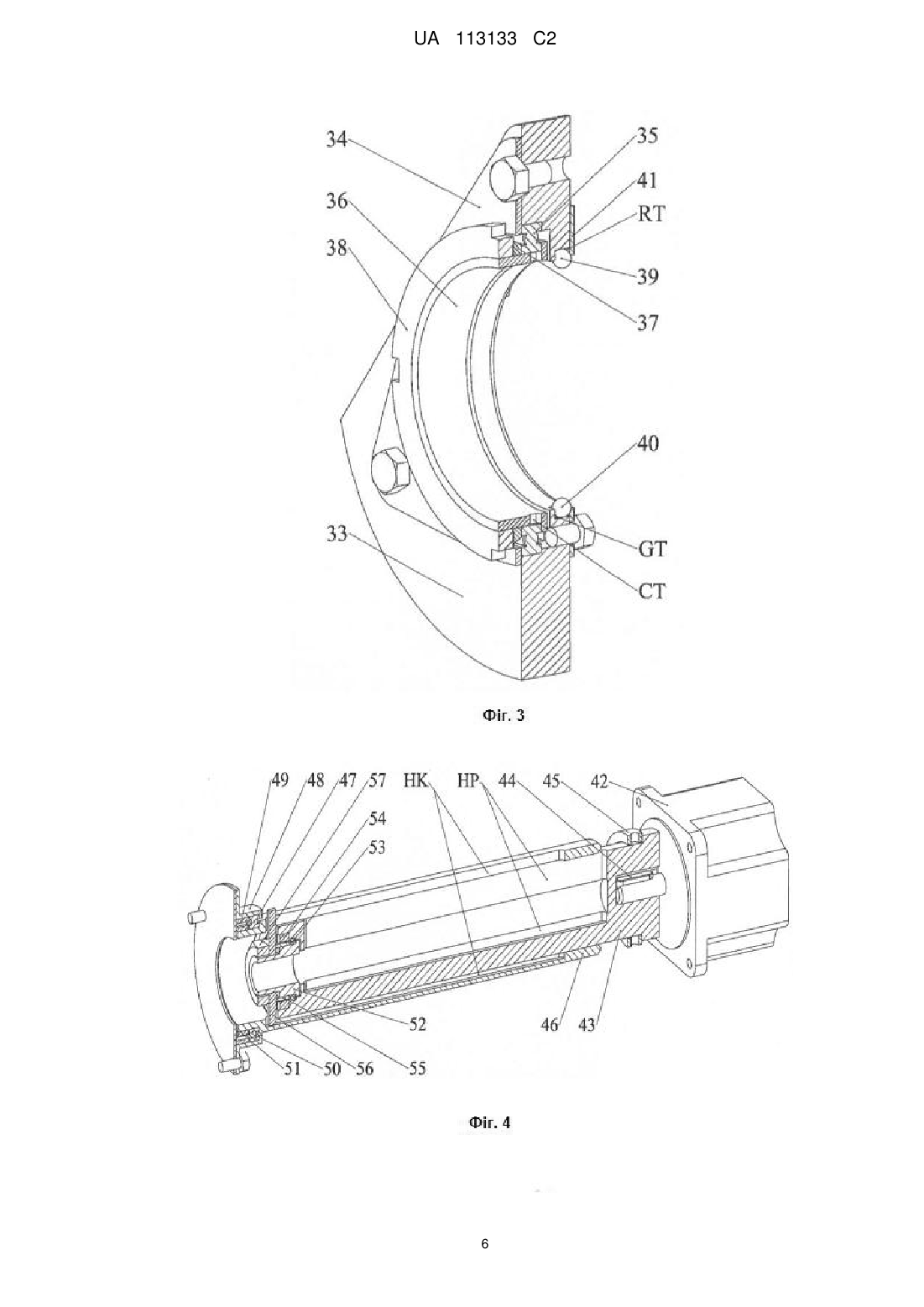
Реферат: Винахід належить до вібраційної техніки і може використовуватись для збудження коливань технологічних машин в таких галузях як машинобудування та приладобудування, а також в гірничо-переробній, харчовій, хімічній промисловості та сільськогосподарському виробництві; UA 113133 C2 (12) UA 113133 C2 Керований симетричний дебалансний вібропривод, що складається із корпусу, в якому на підшипниках встановлено приводний вал з двома діаметрально протилежно зустрічно напрямленими канавками, що мають довжину, рівну половині кроку гвинта, і розміщеним на валу нерухомим і рухомим дебалансами та механізмом регулювання положення рухомого дебалансу, що виконаний у вигляді шпонок, розміщених в канавках і зв'язаних з рухомим дебалансом, згідно з винаходом, на приводному валу встановлено два нерухомих відносно нього дебаланси, центри мас яких і вісь приводного вала лежать в одній площині, а по обидва боки від кожного нерухомого дебалансу виконано по парі діаметрально протилежних зустрічно напрямлених канавок та розміщено по парі рухомих дебалансів з механізмами регулювання їх положення, причому, механізми регулювання положення рухомих дебалансів жорстко кінематично зв'язані у кожній парі та між парами і отримують переміщення вздовж осі приводного вала від механізму гвинтової подачі з приводом від крокового двигуна. Запропонований керований симетричний дебалансний вібропривод для вібраційних технологічних машин з довгими (протяжними) робочими контейнерами дозволяє створити плоске вібраційне поле, в якому вал віброприводу здійснює коливання у вертикальній площині по траєкторії, що має форму еліпса, та у автоматичному режимі незалежно керувати частотою та амплітудою циклічної вимушуючої сили керованого віброприводу і підтримувати енергоощадний резонансний режим роботи вібраційних технологічних машин, а також підтримувати технологічно оптимальне значення амплітуди коливань робочого контейнера на резонансній його частоті і таким чином розширити технологічні можливості даних вібромашин. UA 113133 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до вібраційної техніки і може використовуватись для збудження коливань (вібраційного приводу) технологічних машин у таких галузях як машинобудування та приладобудування, а також в гірничо-переробній, харчовій, хімічній промисловості та сільськогосподарському виробництві. Найбільш близьким до заявлюваного за технічною суттю є віброзбуджувач (SU 1281312 А1, В06В 1/16. Вибровозбудитель. Сердюк Л.И., опубл. 07.01.1987. Бюл. № 1), що складається із корпусу, в якому на підшипниках встановлено приводний вал з розміщеним на ньому нерухомим і рухомим дебалансами та механізмом регулювання положення рухомого дебалансу, на валу виконано діаметрально протилежно дві зустрічно напрямлені канавки, що мають довжину, рівну половині кроку гвинта, і в нормальному перерізі форму півкруга, механізм регулювання положення рухомого дебалансу виконаний у вигляді шпонок, розміщених в канавках і зв'язаних з рухомим дебалансом, і тяги, зв'язаної із зовнішньою обоймою одного із підшипників, а рухомий дебаланс зв'язаний з внутрішньою обоймою того ж підшипника і кут нахилу канавок до повздовжньої осі приводного вала, на ділянці між рухомим та нерухомим дебалансами, виконаний плавно змінним від нуля до заданого значення. Недоліком даного віброзбуджувача є те, що його не можливо застосувати для приводу вібромашин із горизонтальним положенням приводного вала, які мають довгі (протяжні) робочі контейнери. Ще одним суттєвим недоліком даного віброзбуджувача є те, що в ньому складно забезпечити задане технологічно необхідне значення амплітуди циклічної вимушуючої сили та те, що за його допомогою нього можна керувати амплітудою циклічної вимушуючої сили лише вручну. В основу винаходу поставлено задачу у керованому віброзбуджувачі, шляхом застосування двох нерухомих відносно приводного вала дебалансів, центри мас яких і вісь приводного вала лежать в одній площині, та двох пар рухомих дебалансів і встановлення жорстких кінематичних зв'язків з рухомими дебалансами у кожній парі та між парами з приводом від крокового двигуна з гвинтовою передачею, забезпечити точність і синхронність встановлення положення між рухомими та нерухомими дебалансами у кожній парі та створити плоске вібраційне поле, в якому коливання приводного вала віброприводу матимуть форму еліпса у вертикальній площині, що є перпендикулярною до осі цього вала, та у автоматичному режимі незалежно керувати частотою та амплітудою циклічної вимушуючої сили керованого віброприводу, чим розширити технологічні можливості віброзбуджувача. Поставлена задача вирішується тим, що у керованому симетричному дебалансному віброприводі, що складається із корпусу, в якому на підшипниках встановлено приводний вал з двома діаметрально протилежно зустрічно напрямленими канавками, що мають довжину, рівну половині кроку гвинта, і розміщеним на валу нерухомим і рухомим дебалансами та механізмом регулювання положення рухомого дебалансу, що виконаний у вигляді шпонок, розміщених в канавках і зв'язаних з рухомим дебалансом, згідно з винаходом, на приводному валу встановлено два нерухомих відносно нього дебаланси, центри мас яких і вісь приводного вала лежать в одній площині, а по обидва боки від кожного нерухомого дебалансу виконано по парі діаметрально протилежних зустрічно напрямлених канавок та розміщено по парі рухомих дебалансів з механізмами регулювання їх положення, причому, механізми регулювання положення рухомих дебалансів жорстко кінематично зв'язані у кожній парі та між парами і отримують переміщення вздовж осі приводного вала від механізму гвинтової подачі з приводом від крокового двигуна. Запропонований керований симетричний дебалансний вібропривод для вібраційних технологічних машин з довгими (протяжними) робочими контейнерами дозволяє створити плоске вібраційне поле в якому вал віброприводу здійснює коливання у вертикальній площині по траєкторії, що має форму еліпса, та у автоматичному режимі незалежно керувати частотою та амплітудою циклічної вимушуючої сили керованого віброприводу і підтримувати енергоощадний резонансний режим роботи вібраційних технологічних машин, а також підтримувати технологічно оптимальне значення амплітуди коливань робочого контейнера на резонансній його частоті і таким чином розширити технологічні можливості даних вібромашин. На фіг. 1 зображено конструкцію керованого симетричного дебалансного віброприводу у зборі, на фіг. 2 - конструкція приводного вала з нерухомими дебалансами, фіг. 3 - конструкція вузла першого рухомого дебалансу, фіг. 4 - конструкція механізму гвинтової подачі, фіг. 5 конструкція механізму регулювання положення третього та четвертого рухомих дебалансів, фіг. 6 - конструкція механізму регулювання положення першого та другого рухомих дебалансів, фіг. 7 динамічна схема приводного вала віброприводу. Керований симетричний дебалансний вібропривод для адаптивних вібраційних технологічних машин складається із таких конструктивних та функціональних частин: корпус 1; 1 UA 113133 C2 5 10 15 20 25 30 35 40 45 50 55 60 вузол основного приводного вала В; вузол першого рухомого дебалансу С; вузол другого рухомого дебалансу D; вузол третього рухомого дебалансу F; вузол четвертого рухомого дебалансу Е; механізм регулювання положення Η першого та другого вузлів рухомих дебалансів С, D; механізм регулювання положення K третього та четвертого вузлів рухомих дебалансів F, Е; механізм гвинтової подачі Ρ з приводом від крокового двигуна. Корпус 1 складається з двох стійок 10 та 11, за допомогою яких вібропривод кріпиться до робочого контейнера вібраційних технологічних машин. Стійки 10 та 11 з'єднані між собою основним циліндром 12. До стійки 10 кріпиться також закритий циліндр 13, а до стійки 11 кріпиться відкритий циліндр 14. В торці закритого циліндра 13 розміщений сальник 15. До відкритого циліндра 14 кріпиться направляючий циліндр 16. Направляючий циліндр 16 має шпонковий паз HS. Вузол основного приводного вала В складається з пустотілого приводного вала 17, на якому містяться два радіально-упорних підшипники 18 і 19, за допомогою яких приводний вал 17 встановлюється у корпус 1. На приводному валу 17 за допомогою шпонок 20; 21; 22 та 72, стопорних шайб 23 і 24, та гайок 25 і 26 жорстко закріплено нерухомі дебаланси 27 і 28. Між конічним радіально-упорним підшипником 18 та нерухомим дебалансом 28 розміщена шайба 30. Шайба 29 розміщена між радіально-упорним підшипником 19 та нерухомим дебалансом 27. Керований симетричний дебалансний вібропривод приводиться в дію за рахунок обертового моменту, що передається приводному валу 17 через приводну муфту 31, яка закріплена на приводному валу 17 за допомогою шпонки 32. По обидва боки від кожного нерухомого дебалансу 27 та 28 виконано по парі діаметрально протилежних зустрічно напрямлених канавок KL і KM, KР і KТ, що в перерізі мають форму півкруга. Також по обидва боки від кожного нерухомого дебалансу 27 та 28 виконано пази вздовж осьової лінії PL і РМ, РР і РТ. Вузол першого рухомогодебалансу С розташований на приводному валу 17, та переміщається вздовж його осі і повертається навколо неї. Основним елементом вузла рухомого дебалансу С є сам рухомий дебаланс 33. У ньому шайбою 34 зафіксовано зовнішнє кільце підшипника 35. Шайба 34 кріпиться до рухомого дебалансу 33 гвинтами. Внутрішнє кільце підшипника 35 фіксується у проміжному циліндрі 36 шайбою 37 та гайкою 38. Проміжний циліндр 36 має наскрізний отвір СТ під планки 6 і 7. Рухомий дебаланс 33 має два пази RT і GT, у яких розміщуються кулькові шпонки 39 і 40, що переміщаються по канавках KТ приводного вала 17. Завдяки кульковим шпонкам 39 і 40 відбувається передача обертового моменту від приводного вала 17 до рухомого дебалансу 33. Випаданню кульок з рухомого дебалансу 33 запобігає шайба 41, яка гвинтами кріпиться до рухомого дебалансу 33. Вузли першого і четвертого рухомих дебалансів С та Ε ідентичні, а вузли другого та треього рухомих дебалансів D і F відрізняються від них розмірами деталей та отворів у дебалансах, оскільки вони розташовані на частинах приводного вала 17 з меншим діаметром. Товщини першого, другого, третього та четвертого рухомих дебалансів підібрані так, що статичні моменти відносно осі приводного вала 17 в усіх чотирьох однакові. Механізм гвинтової подачі Ρ забезпечує перетворення обертового руху крокового двигуна 42 у зворотно поступальний рух механізмів регулювання положення рухомих дебалансів Η та K. Механізм гвинтової подачі Ρ містить кроковий двигун 42, приводний стакан 43, шпонку 44, стопорну втулку 45, ходовий стакан 46, підшипник 47, приводну тарілку 48, фіксуючий циліндр 49, стопорну шайбу 50, гайку 51, приводну гайку 52, підшипник 53, стопорну гайку 54, упорний циліндр 55, стопорну шпонку 56 та стопорну гайку 57. Приводний стакан 43 нерухомо закріплений на валу крокового двигуна 42 за допомогою шпонки 44. Приводний стакан 43 має шпонковий паз HP, який одну сторону приводного стакана 43 пересікає наскрізь, а на другій діаметрально протилежній внутрішній стороні утворює канавку під шпонку. З боку крокового двигуна 42 приводний стакан 43 має бортик, у який впирається стопорна втулка 45, що гвинтами зафіксована у направляючому циліндрі 16. Для забезпечення переміщення рухомого дебалансу 33 вздовж осі приводного вала 17 використовується ходовий стакан 46. Ходовий стакан 46 кріпиться до рухомого дебалансу 33 за допомогою вузла кінематичної розв'язки. Вузол кінематичної розв'язки дозволяє рухомому дебалансу 33 вільно обертатись відносно ходового стакана 46 і складається з підшипника 47, приводної тарілки 48, фіксуючого циліндра 49, стопорної шайби 50 та гайки 51. Зовнішнє кільце підшипника 47 у приводній тарілці 48 фіксується циліндром 49. Приводна тарілка 48 кріпиться до рухомого дебалансу 33 гвинтами. Внутрішнє кільце підшипника 47 на ходовому стакані 46 фіксується стопорною шайбою 50 та гайкою 51. Ходовий стакан 46 із приводним валом 17 утворюють циліндричну напрямну для прямолінійного руху рухомого дебалансу 33 вздовж осі приводного вала 17. Ходовий стакан 46 2 UA 113133 C2 5 10 15 20 25 30 35 40 45 50 55 60 на внутрішній циліндричній поверхні має різьбу із певним кроком та шпонковий паз НK, який одну сторону ходового циліндра 46 пересікає наскрізь, а на другій діаметрально протилежній внутрішній стороні утворює канавку під шпонку. В ходовому стакані 46 розміщений приводний стакан 43, на зовнішній поверхні якого є різьба з таким же кроком, як на внутрішній поверхні ходового стакана 46. Положення вузлів рухомих дебалансів Η та K регулюється механізмом, що складається з: приводної гайки 52, яка має різьбу на внутрішній циліндричній поверхні із кроком, аналогічним ходовому стакану 46, підшипника 53, стопорної гайки 54, упорного циліндра 55, стопорної шпонки 56 та стопорної гайки 57. Зовнішнє кільце підшипника 53 жорстко фіксується в привідному стакані 43 стопорною гайкою 54. Внутрішнє кільце підшипника 53 жорстко закріплене на приводній гайці 56 за допомогою упорного циліндра 55, стопорної шпонки 56 та стопорної гайки 57. Стопорна шпонка 56 заходить у шпонковий паз НK на внутрішній поверхні ходового стакана 46 та шпонковий паз HS направляючого циліндра 16. Механізм регулювання положення K третього та четвертого вузлів рухомих дебалансів F, Е має розв'язки між осьовим та кутовим переміщенням третього та четвертого рухомих дебалансів, розташованих на кінцях внутрішнього штока 58. Вузол кінематичної розв'язки між осьовим та кутовим переміщенням другого та четвертого рухомих дебалансів складається з циліндра 59, який має наскрізний отвір під планку 60, що зв'язує вузол кінематичної розв'язки з внутрішнім штоком 58. Кришка 61 запобігає випаданню планки 60 з циліндра 59. На зовнішній поверхні циліндра 59 розміщені два підшипники 62 та 63, між зовнішніми кільцями яких є втулка 64, у яку вставляються дві планки 65 і 66, що передають поступальний рух до рухомих дебалансів. Фіксуються підшипники на циліндрі 59 за допомогою стопорної шайби 67 і гайки 68. Основним елементом механізму регулювання положення Η першого та другого вузлів рухомих дебалансів С, D є зовнішній шток 69. На торці зовнішнього штока 69 є канавка, у яку за допомогою шайби 70 і гвинта 71 кріпиться приводна планка 2. З боку крокового двигуна 42, на зовнішній поверхні зовнішній шток 69 має різьбу з кроком, як на внутрішній поверхні приводної гайки 52. Вздовж своєї осі зовнішній шток 69 має циліндричний отвір, по якому рухається внутрішній шток 58. Також вздовж осьової лінії зовнішній шток має два пази PV і PD. Для забезпечення повздовжнього переміщення рухомих вузлів дебалансів С і D, по центру та в кінці з боку приводної муфти 31 на зовнішньому штоку 69 розміщені два вузли кінематичної розв'язки, між осьовими та кутовими переміщеннями першого та другого рухомих дебалансів, які відрізняються тільки розміром елементів. Вузол кінематичної розв'язки між осьовими та кутовими переміщеннями першого та другого рухомих дебалансів містить два підшипники 3 і 4, між зовнішніми кільцями яких є втулка 5, у яку вставляються дві планки 6 і 7, що передають зворотно поступальний рух вузла першого та другого рухомих дебалансів. Фіксуються підшипники на зовнішньому штоку 69 з допомогою стопорної шайби 8 і гайки 9. Керований симетричний дебалансний вібропривод працює таким чином. Перед його запуском, вузли другого та четвертого рухомих дебалансів D і Ε знаходяться в діаметрально протилежному положенні до нерухомого дебалансу 27 і кут між їхніми центрами мас становить α=180°. Вузли першого та третього рухомих дебалансів С і F розташовані аналогічно до нерухомого дебалансу 28, тому сумарний статичний момент дебалансів відносно центральної осі приводного вала 17 рівний нулю. При включені керованого віброприводу шляхом прикладення обертового моменту до приводного вала 17 через приводну муфту 31 нерухомі дебаланси 27 та 28, і всі чотири рухомі дебаланси починають обертатись із заданою частотою ωρ яка є близькою до технологічно оптимальної для початку роботи певної вібраційної технологічної машини. Протягом незначного періоду часу від початку роботи адаптивної вібромашини система керування роботою керованого віброзбуджувача (не показана на фігурах) проводить коригування та остаточне виставлення робочої частоти ωр циклічної вимушуючої сили F керованого віброзбуджувача на її оптимальне із енергетичної точки зору значення, забезпечуючи та підтримуючи резонансний режим роботи ωp=ω0. Після коригування робочої частоти ωp приводного вала 17 та забезпечення резонансного режиму роботи коливної механічної системи адаптивної вібраційної технологічної машини починається встановлення заданої оптимальної із технологічної точки зору амплітуди коливань робочого органу (контейнера). Виведення амплітуди циклічної вимушуючої сили F керованого віброприводу (та керування нею F±ΔF) реалізовується системою керування шляхом виведення заданої кількості імпульсів для забезпечення певного кута повороту вала крокового двигуна 42. В результаті команди від системи керування кроковий двигун 42 повертає свій вал на заданий кут β (значення величини кута повороту β вала та напрям обмежень немає, і визначається лише кількістю імпульсів, полярністю та кутовим кроком самого крокового двигуна 42. Ще однією особливістю крокового двигуна 42 є те, що він має здатність утримувати заданий кут повороту). 3 UA 113133 C2 5 10 15 20 25 30 35 40 45 50 55 Поворот вала крокового двигуна 42 на кут β через шпонку 44 передається привідному стакану 43. В результаті чого приводний стакан 43 робить поворот відносно центральної осі пустотілої ділянки приводного вала 17 також на кут β. Приводний стакан 43 своєю зовнішньою поверхнею перебуває у різьбовому з'єднанні із внутрішньою поверхнею ходового стакана 46, рух приводного стакана 43 в осьовому напрямі обмежений (при викручуванні ходового стакана 46 з приводного стакана 43 його рух обмежує стопорна втулка 45, а при закручуванні його рух обмежує вал крокового двигуна 42, який до упору заходить в приводний стакан 43), обертовий рух ходового стакана 46 навколо спільної осі із приводним стаканом 43 та пустотілим приводним валом 17 обмежує стопорна шпонка 56, що заходить у шпонковий паз HS направляючого циліндра 16. Тому поворот приводного стакана 43 на кут β зумовить викручування (закручування) ходового стакана 46 та його переміщення вздовж основної осі пустотілої ділянки приводного вала 17. Дане переміщення зумовить рух вузла третього рухомого дебалансу F вздовж основної осі пустотілої ділянки приводного вала 17. Завдяки тому, що кінематична розв'язка дозволяє третьому рухомому дебалансу вільно обертатись відносно ходового стакана 46 він (третій рухомий дебаланс) може обертатись навколо основної осі пустотілої ділянки приводного вала 17 та переміщатись вздовж неї. Переміщаючись вздовж основної осі пустотілої ділянки приводного вала 17 третій рухомий дебаланс починає повертатись відносно його центральної осі завдяки тому, що відбувається переміщення двох кулькових шпонок 39, 40 які одночасно перебувають у двох пазах під шпонку RT і GT та у двох діаметрально протилежних, зустрічно напрямлених канавках KР пустотілої ділянки приводного вала 17. Внутрішній шток 58 передає зворотно поступальний рух від третього до четвертого рухомого дебалансу. Планки 65, 66 одним кінцем розміщуються у наскрізному отворі СТ, проміжного циліндра 36, який може вільно обертатись відносно рухомого дебалансу, бо з'єднаний з ним через підшипник 35. Другий кінець планок 65, 66 розташований у втулці 64, яка може вільно обертатись відносно циліндра 59, оскільки з'єднана з ним через підшипники 62 і 63. Циліндр 59 виконує зворотно поступальний рух по зовнішній поверхні зовнішнього штоку 69 і через планку 60 передає зворотно поступальний рух внутрішньому штоку 58, що переміщається по внутрішній поверхні зовнішнього штока 69. Рух від внутрішнього штока 58 до четвертого рухомого дебалансу передається за тим же принципом, що й від третього рухомого дебалансу до внутрішнього штока 58. Внаслідок цього, третій та четвертий рухомі дебаланси синхронно переміщаються вздовж і навколо осі приводного вала. У шпонковий паз HP приводного стакана 43 входить приводна планка 2, яка передає обертовий рух від приводного стакана 43 до зовнішнього штока 69. Приводна гайка 52 не здійснює жодних рухів відносно корпусу 1, оскільки її зворотнопоступальний рух обмежує приводний стакан 43, який обертається навколо своєї осі та не передає обертового руху приводній гайці 52, бо з'єднується з нею через підшипник 53. Обертовий рух приводної гайки 52 обмежує стопорна шпонка 56, що заходить у шпонковий паз HS направляючого циліндра 16. Зовнішній шток 69, своєю зовнішньою поверхнею, перебуває у різьбовому з'єднанні із внутрішньою поверхнею приводної гайки 52. Поворот приводного стакана 43 на кут β завдяки прямолінійній направляючій, що складається із приводної планки 2 та шпонкового паза HP зумовить закручування (викручування) зовнішнього штока 69 та його переміщення вздовж основної осі пустотілої ділянки приводного вала 17. Від зовнішнього штока 69, через планки 6, 7 передається зворотно-поступальний рух першому рухомому дебалансу. Зовнішній шток 69 через підшипники 3 та 4 передає зворотно-поступальний рух втулці 5, яка може вільно обертатись навколо своєї осі разом з планками 6, 7. В результаті чого, планки 6, 7, які проходять через наскрізний отвір СТ у проміжному циліндрі 36 та прямолінійній направляючій, яка виконана із двох діаметрально протилежних пазів РТ, що розташовані вздовж осі приводного вала 17, може здійснювати зворотно-поступальний рух разом із зовнішнім штоком 69 та одночасно обертатись разом із приводним валом 17 навколо його осі. Проміжний циліндр 36, через підшипник 35, дозволяє передати зворотно-поступальний рух від зовнішнього штока 69 до першого рухомого дебалансу, забезпечуючи тим самим кінематичну розв'язку між обертовим та зворотно-поступальним рухом першого рухомого дебалансу. Перший рухомий дебаланс розміщений посередині зовнішнього штока 69, другий рухомий дебаланс розміщений на кінці зовнішнього штока 69 з боку приводної муфти 31. Перший та другий рухомі дебаланси переміщаються синхронно. Переміщаючись вздовж основної осі приводного вала 17 перший рухомий дебаланс починає повертатись відносно його центральної осі завдяки тому, що відбувається переміщення двох кулькових шпонок 39, 40 які одночасно перебувають у двох пазах під шпонку RT і GT першого 4 UA 113133 C2 5 рухомого дебалансу та у двох діаметрально протилежно зустрічно напрямлених канавках KТ приводного вала 17. В результаті повороту вала крокового двигуна 42 на кут β забезпечується синхронний поворот чотирьох рухомих дебалансів відносно нерухомих дебалансів 27 і 28, змінюється сумарний статичний момент дебалансів відносно центральної осі приводного вала 17. Це забезпечує зміну амплітуди циклічної вимушуючої сили керованого симетричного дебалансного віброприводу для адаптивних вібраційних технологічних машин. ФОРМУЛА ВИНАХОДУ 10 15 20 Керований симетричний дебалансний вібропривод, що складається із корпусу, в якому на підшипниках встановлено приводний вал з двома діаметрально протилежно зустрічно напрямленими канавками, що мають довжину, рівну половині кроку гвинта, і розміщеним на валу нерухомим і рухомим дебалансами та механізмом регулювання положення рухомого дебалансу, що виконаний у вигляді шпонок, розміщених в канавках і зв'язаних з рухомим дебалансом, який відрізняється тим, що на приводному валу встановлено два нерухомих відносно нього дебаланси, центри мас яких і вісь приводного вала лежать в одній площині, а по обидва боки від кожного нерухомого дебалансу виконано по парі діаметрально протилежних зустрічно напрямлених канавок та розміщено по парі рухомих дебалансів з механізмами регулювання їх положення, причому, механізми регулювання положення рухомих дебалансів жорстко кінематично зв'язані у кожній парі та між парами і отримують переміщення вздовж осі приводного вала від механізму гвинтової подачі з приводом від крокового двигуна. 5 UA 113133 C2 6 UA 113133 C2 7 UA 113133 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B06B 1/16
Мітки: керований, симетричний, дебалансний, вібропривод
Код посилання
<a href="https://ua.patents.su/10-113133-kerovanijj-simetrichnijj-debalansnijj-vibroprivod.html" target="_blank" rel="follow" title="База патентів України">Керований симетричний дебалансний вібропривод</a>
Керований симетричний дебалансний збуджувач коливань
Номер патенту: 112137
Опубліковано: 25.07.2016
Автори: Мокрицький Роман Богданович, Ярошенко Леонід Вікторович, Чубик Роман Васильович, Зрайло Назар Михайлович
МПК: B06B 1/16
Мітки: керований, коливань, дебалансний, симетричний, збуджувач
Формула / Реферат:
Керований симетричний дебалансний збуджувач коливань, що містить корпус, встановлений в ньому на підшипниках вал з гвинтовими пазами та розміщеними на валу двома рухомими дебалансами і одним нерухомим, статичний момент якого удвічі більший від статичного моменту нерухомих дебалансів, які розташовані по обидва боки від нерухомого дебалансу, та розміщених в гвинтових пазах вала кульових шпонок, що взаємодіють з рухомими дебалансами, який...
Керований дебалансний віброзбуджувач
Номер патенту: 88546
Опубліковано: 26.10.2009
Автори: Пісковий Сергій Сергійович, Сердюк Леонід Іванович
МПК: B06B 1/10
Мітки: дебалансний, віброзбуджувач, керований
Формула / Реферат:
Керований дебалансний віброзбуджувач, що складається з корпусу, розміщеного в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднані з валом кульовими шпонками, статичний момент кожного рухомого дорівнює половині статичного моменту нерухомого дебалансу, який відрізняється тим, що кульові шпонки, які з'єднують рухомі дебаланси з валом, розміщені в...
Керований дебалансний віброзбуджувач
Номер патенту: 32745
Опубліковано: 26.05.2008
Автори: Сердюк Леонід Іванович, Пісковий Сергій Сергійович
МПК: B06B 1/10
Мітки: дебалансний, віброзбуджувач, керований
Формула / Реферат:
Керований дебалансний віброзбуджувач, що складається з корпусу, розміщеного в ньому механізму керування та дебалансного вала з гвинтовими канавками, на якому закріплено один нерухомий дебаланс та два рухомих дебаланси, з'єднані з валом кульовими шпонками, статичний момент кожного рухомого дорівнює половині статичного моменту нерухомого дебаланса, який відрізняється тим, що кульові шпонки, які з'єднують рухомі дебаланси з валом, розміщені в...
Керований віброзбуджувач
Номер патенту: 111436
Опубліковано: 25.04.2016
Автори: Чубик Роман Васильович, Зрайло Назар Михайлович, Ярошенко Леонід Вікторович
МПК: B06B 1/16
Мітки: віброзбуджувач, керований
Формула / Реферат:
Керований віброзбуджувач, що складається із корпусу, в якому на підшипниках встановлено приводний вал з розміщеним на ньому нерухомим і рухомим дебалансами, на валу виконано діаметрально протилежно дві зустрічно напрямлені канавки, що мають довжину, рівну половині кроку гвинта і в нормальному перерізі форму півкруга, та механізму регулювання положення рухомого дебалансу, що виконаний у вигляді шпонок, розміщених в канавках і зв'язаних з...
Планетарний дебалансний інерційний запобіжний механізм
Номер патенту: 71529
Опубліковано: 15.11.2004
Автор: Нагорняк Галина Степанівна
МПК: F16D 43/00
Мітки: інерційний, запобіжний, дебалансний, механізм, планетарний
Формула / Реферат:
Планетарний дебалансний інерційний запобіжний механізм з ведучим водилом і веденим центральним колесом, які зв'язані між собою за допомогою сателітів, кожен з яких нерухомо з'єднаний з встановленим в підшипниках водила і його кришки валом, на якому жорстко закріплений ведучий диск з периферійним виступом-поводком, а в проміжку між ближніми торцями сателіта і ведучого диска на валу на підшипниках встановлений дебаланс, який відрізняється тим,...
Попередній патент: Застосування 2-арил-3-гідроксихінолін-4-онів як флуоресцентних зондів для визначення аденозин-5′-трифосфату у водних розчинах
Наступний патент: Спосіб прогнозування метаболічних порушень у віл-інфікованих осіб, хворих на хронічний гепатит с
Випадковий патент: Установка для випробувань пасових передач