Спосіб калібрування блока датчиків системи орієнтації
Номер патенту: 120655
Опубліковано: 10.11.2017
Автори: Шаров Сергій Анатолійович, Кротов Вадим Володимирович, Лакоза Сергій Леонідович, Цисарж Вячеслав Вікторович, Літош Антон Михайлович

Формула / Реферат
Спосіб калібрування блока датчиків системи орієнтації, що включає установку блока в кантувач на калібрувальну поверхню в робочому діапазоні температур, визначення параметрів неточності виставлення осей чутливості первинних перетворювачів, вимірювання проекцій в осях чутливості первинних перетворювачів, обрахунок проекцій в осях системи координат блока, який відрізняється тим, що блок датчиків установлюють на калібровані поверхні вздовж довільних, але заздалегідь відомих напрямків, число яких не менше двох, і послідовно задають вимірювальні положення шляхом переустановлення кантувача на інші грані з числом різних значень кутів повороту не менше двох на кожному напрямку, параметри неточності виставлення осей чутливості визначають разом з параметрами калібровки чутливих елементів, параметрами впливу магнітних полів-перешкод і взаємного впливу первинних вимірювачів магнітного поля, установлюють послідовно блок датчиків уздовж довільно заданих двох напрямків, визначають зміну розрахункових значень в осях системи координат блока в робочому діапазоні температур, а проекції ![]()
![]() вектора прискорення сили тяжіння, кутової швидкості обертання й вектора напруженості магнітного поля обчислюють в осях системи координат блока за вимірюваннями
вектора прискорення сили тяжіння, кутової швидкості обертання й вектора напруженості магнітного поля обчислюють в осях системи координат блока за вимірюваннями ![]() ,
, ![]() ,
, ![]() в осях чутливості первинних вимірювачів і температури
в осях чутливості первинних вимірювачів і температури ![]() блока датчиків
блока датчиків
![]() ,
,
де ![]() ,
, ![]() - масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури,
- масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури,
![]() ,
,
де ![]() ,
, ![]() ,
, ![]() ,
, ![]() - параметри, знайдені при температурі налагодження блока.
- параметри, знайдені при температурі налагодження блока.
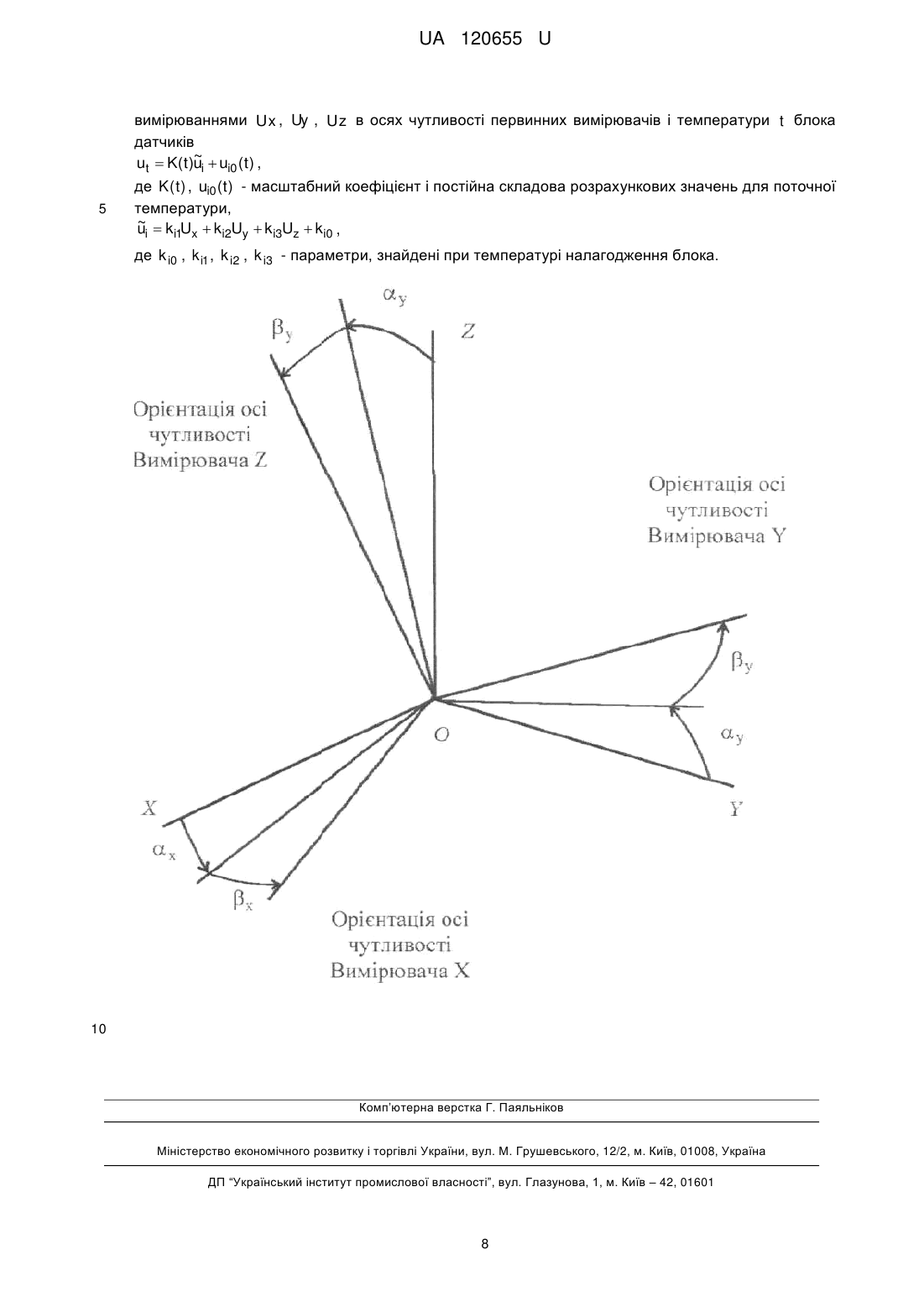
Текст
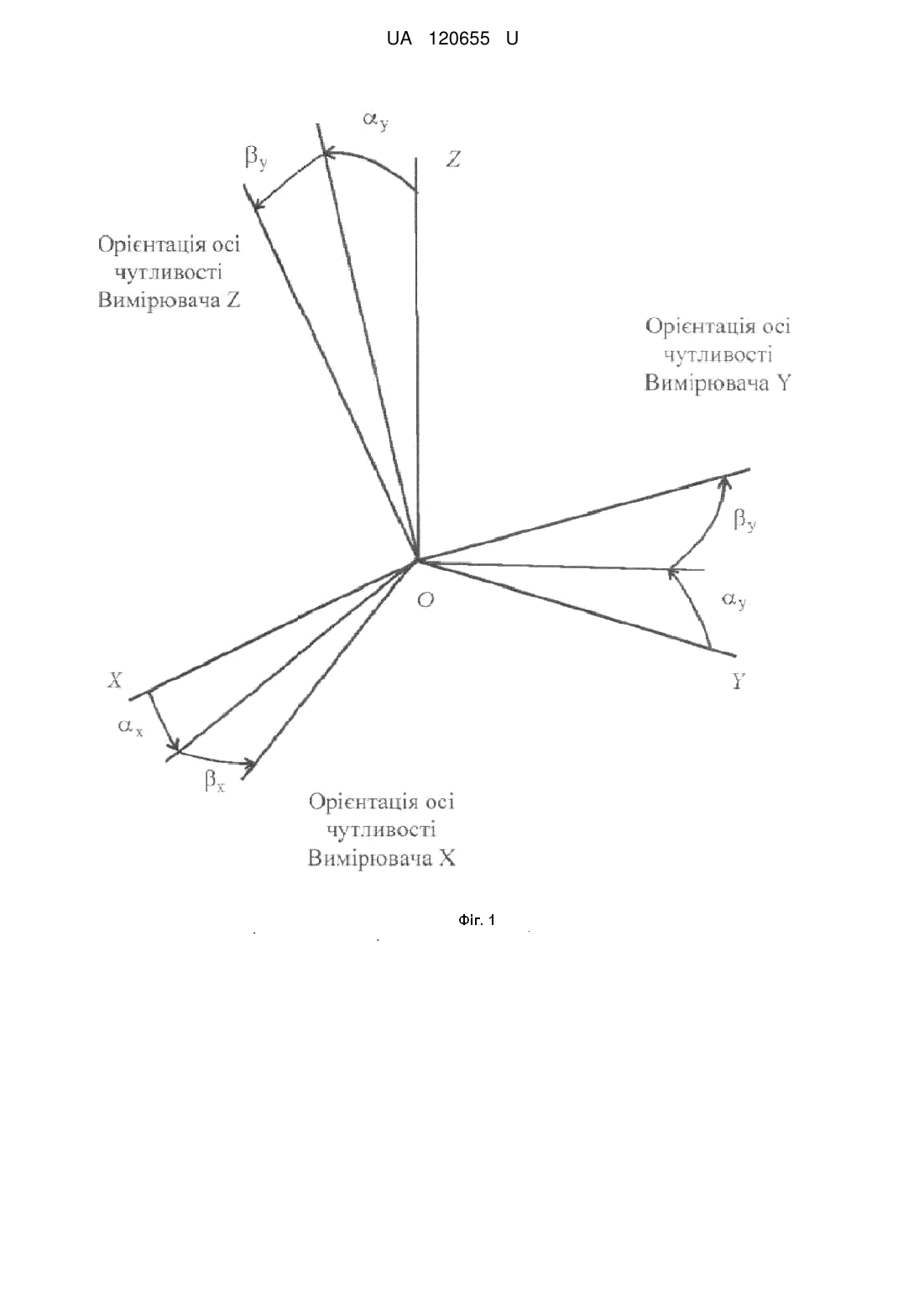
Реферат: Спосіб калібрування блока датчиків системи орієнтації, що включає установку блока в кантувач на калібрувальну поверхню в робочому діапазоні температур, визначення параметрів неточності виставлення осей чутливості первинних перетворювачів, вимірювання проекцій в осях чутливості первинних перетворювачів, обрахунок проекцій в осях системи координат блока, причому блок датчиків установлюють на калібровані поверхні вздовж довільних, але заздалегідь відомих напрямків, число яких не менше двох, і послідовно задають вимірювальні положення шляхом переустановлення кантувача на інші грані з числом різних значень кутів повороту не менше двох на кожному напрямку, параметри неточності виставлення осей чутливості визначають разом з параметрами калібровки чутливих елементів, параметрами впливу магнітних полів-перешкод і взаємного впливу первинних вимірювачів магнітного поля, установлюють послідовно блок датчиків уздовж довільно заданих двох напрямків, визначають зміну розрахункових значень в осях системи координат блока в робочому діапазоні температур. UA 120655 U (54) СПОСІБ КАЛІБРУВАННЯ БЛОКА ДАТЧИКІВ СИСТЕМИ ОРІЄНТАЦІЇ UA 120655 U UA 120655 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до точного приладобудування й може бути використана в автономних безплатформних курсових і навігаційних системах, тобто в таких системах, де застосовуються трикомпонентні вимірювачі прискорення сили тяжіння, трикомпонентні вимірювачі кутової швидкості, трикомпонентні вимірювачі вектора напруженості магнітного поля. Система орієнтації [1], створена з використанням трикомпонентного вимірювача вектора прискорення сили тяжіння й трикомпонентного вимірювача вектора напруженості магнітного поля, призначена для вимірювання проекцій зазначених векторів на осі системи координат, зв'язаної з корпусом приладу. По виміряних проекціях відповідно до відомих алгоритмів [1] розраховуються кути орієнтації скважини, оскільки корпус приладу стикається з її внутрішньою поверхнею під час вимірювань. Точність визначення кутів орієнтації прямо пов'язана з точністю вимірювань проекцій векторів. Відомі способи настроювання інклінометрів [1], що включають припасування посадкових місць первинних вимірювачів, попереднє калібрування кожного первинного вимірювача, складання інклінометра, установку інклінометра в заданих напрямках з метою контролю й атестації приладу. Процедуру повторюють при перевищенні похибки приладу меж заданого діапазону. Недоліком описаних способів є значна трудомісткість процесу настроювання й відсутність рекомендацій з усунення похибок у вихідних сигналах трикомпонентних вимірювачів інклінометра. Найбільш близьким до корисної моделі є спосіб калібрування блока чутливих елементів з ортогональними осями [патент США на винахід № 6729176 М. кл. G05B 19/42, Calibration of orthogonal sensor suite, Date of Patent: May 4, 2004, Family ID: 25230297, Appl. No.: 09/824,543, Filed: Apr. 2, 2001]. Згідно зі способом, блок чутливих елементів кріпиться в допоміжний пристрій - кантувач, грані якого фізично реалізують бажану (ідеальну) систему координат, у якій повинні проводиться вимірювання. Установка кантувача із блоком чутливих елементів на рівну і точно виставлену в площині горизонту поверхню дозволяє відтворити в просторі наперед задані й відомі положення блока чутливих елементів щодо вектора прискорення сили тяжіння. За вихідними сигналами датчиків-акселерометрів за сукупністю вимірювань при різних положеннях кантувача, розраховуються коефіцієнти моделі поправок, що включають поправки на нульові зміщення вихідних сигналів, поправки на нерівність коефіцієнтів перетворення, поправки на перекоси осей чутливості встановлених датчиків. Основним недоліком способу слід вважати незадовільну точність калібрування в діапазоні робочих температур, оскільки при відмінності температури експлуатації від температури, при якій проводилося калібрування, змінюються як коефіцієнти перетворення, так і нульові сигнали датчиків, а отже, розрахована модель поправок не відповідає дійсній. Додатковими недоліками способу слід вважати точність моделювання положень блока в просторі, яка визначається точністю обробки поверхонь кантувача і його кутів між гранями, а також точністю обробки й попередньої виставки відкаліброваної поверхні. Задача корисної моделі - підвищення точності калібрування блока датчиків системи навігації за рахунок усунення похибок у вихідних сигналах, викликаних: нерівністю коефіцієнтів перетворення й наявністю електричних нульових зсувів у вихідних сигналах первинних вимірювачів (як у прототипі); перекосами осей чутливості первинних вимірювачів щодо осей системи координат блока датчиків (як у прототипі); дією постійних магнітних полів-перешкод в області установки перетворювачів магнітного поля; перехресними зв'язками між перетворювачами магнітного поля; зміною коефіцієнтів перетворення й дрейфом нулів у каналах вимірювання у робочому діапазоні температур експлуатації блока датчиків. Пропонований спосіб калібрування припускає наступні умови: калібрування блока проводиться в приміщенні, де відсутні магнітні поля-перешкоди й температура в приміщенні вважається незмінною протягом процесу калібрування блока датчиків; температура в приміщенні, при якій проводиться калібрування блока, входить у діапазон робочих температур системи; передбачається наявність декількох (як мінімум двох) каліброваних поверхонь із бічними напрямними, орієнтація, в просторі яких заздалегідь відома; у процесі нагрівання й охолодження блока датчиків у робочому діапазоні температур блок не змінює свого просторового положення. 1 UA 120655 U 5 10 15 Поставлена задача вирішується тим, що у способі калібрування блока датчиків системи орієнтації, що включає установку блока в кантувач на калібрувальну поверхню в робочому діапазоні температур, визначення параметрів неточності виставлення осей чутливості первинних перетворювачів, вимірювання проекцій в осях чутливості первинних перетворювачів, обрахунок проекцій в осях системи координат блока, новим є те, що блок датчиків установлюють на калібрувальні поверхні вздовж довільних, але заздалегідь відомих напрямків, число яких не менше двох, і послідовно задають вимірювальні положення шляхом переустановлення кантувача на інші грані з числом різних значень кутів повороту не менше двох на кожному напрямку, параметри неточності виставлення осей чутливості визначають разом з параметрами калібровки чутливих елементів, параметрами впливу магнітних полівперешкод і взаємного впливу первинних вимірювачів магнітного поля, установлюють послідовно блок датчиків уздовж довільно заданих двох напрямків, визначають зміну розрахункових значень в осях системи координат блока в робочому діапазоні температур, а проекції ui (i x, y, z) вектора прискорення сили тяжіння, кутової швидкості обертання й вектора напруженості магнітного поля обчислюють в осях системи координат блока за вимірюваннями Ux , Uy , Uz в осях чутливості первинних вимірювачів і температури t блока датчиків u K( t )~ u ( t ) , u t 20 25 30 35 40 45 50 i i0 де K( t ) , ui0 (t ) - масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури, ~ k U k U k U k , ui i1 x i2 y i3 z i0 де k i0 , k i1 , k i2 , k i3 - параметри, знайдені при температурі налагодження блока. Спосіб калібрування на базі трикомпонентного вимірювача прискорення сили тяжіння, трикомпонентного вимірювача кутової швидкості й трикомпонентного вимірювача напруженості магнітного поля включає відомі операції, такі самі, як і в прототипі, а саме: установку блока датчиків гранями кантувача на калібровану поверхню в робочому діапазоні температур, визначення параметрів неточності виставки осей чутливості первинних вимірювачів, вимірювання проекцій в осях чутливості первинних вимірювачів, обчислення проекцій в осях системи координат блока датчиків, а також припускає проведення додаткових операцій у порівнянні із прототипом, а саме: 1) блок датчиків встановлюють на відкалібровану поверхню вздовж довільних, але заздалегідь відомих напрямків, число яких не менше двох, і послідовно задають вимірювальні положення шляхом переустановки кантувача, як мінімум, на дві інші грані по кожному напрямку; 2) визначають параметри неточності виставки осей чутливості разом з калібрувальними параметрами чутливих елементів, параметрами впливу магнітних полів-перешкод і взаємного впливу первинних вимірювачів магнітного поля; 3) блок датчиків встановлюють послідовно уздовж довільно заданих двох напрямків; 4) визначають зміну розрахункових значень в осях системи координат блока датчиків у діапазоні температур; 5) обчислюють проекції ui (i x, y, z) вектора прискорення сили тяжіння, вектора кутової швидкості обертання Землі, а також вектора напруженості магнітного поля в осях системи координат блока датчиків за вимірюваннями Ux , Uy , Uz в осях чутливості первинних вимірювачів і температури t всередині блока датчиків ~ u t K( t )ui ui0 ( t ) , де K( t ) , ui0 (t ) - масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури, ~ k U k U k U k , ui i1 x i2 y i3 z i0 де k i0 , k i1 , k i2 , k i3 - параметри, знайдені при температурі калібрування блока датчиків. У загальному випадку вирази для проекцій прискорення сили тяжіння, напруженості магнітного поля Землі й проекцій кутової швидкості обертання Землі у взаємно перпендикулярних осях блока датчиків мають вигляд ~ a xc f11 f12 f13 A x a x 0 ~ a y c f 21 f 22 f 23 A y a y 0 , (1) ~ a zc f 31 f 32 f 33 A z a z0 2 UA 120655 U 5 10 15 20 25 30 ~ m11 m12 m13 R x r x0 rxc ~ , (2) ry c m 21 m 22 m 23 R y r y0 ~ m 31 m 32 m 33 R z rz0 rzc ~ p xc 11 p12 p13 x x0 ~ y c p 21 p 22 p 23 y y0 , (3) ~ zc p 31 p 32 p 33 z z0 ~ ~ ~ де компоненти ~ xc , ~ y c , ~ zc ; ~ , ~ c , ~ і x , y , z - проекції прискорення сили a a a rxc ry rzc тяжіння, напруженості магнітного поля Землі й кутової швидкості обертання Землі у взаємно перпендикулярних осях системи координат ox c y c z c , зв'язаної з блоком датчиків, при температурі калібрування. Вони розраховуються по вихідних сигналах компонентних датчиків прискорення A x , A y , A z , компонентних перетворювачів магнітного поля R x , R y , R z , компонентних вимірювачів кутової швидкості x , y , z : і поправок fij (i, j 1... 3) , a x0 , a y0 , a z0 , mij (i, j 1...3) , rx0 , r y 0 , rz0 і p ij (i, j 1...3) , x 0 , y 0 , z0 , що враховують реальні характеристики датчиків (нерівність коефіцієнтів перетворення, наявність електричних нульових зсувів у вихідних сигналах, перекоси осей чутливості первинних вимірювачів щодо корпуса і кріплень), геометричні похибки їх установки в блоці датчиків (перекоси місць кріплення первинних вимірювачів відносно напрямків системи координат блока датчиків ox c y c z c ), вплив магнітних полів-перешкод на перетворювачі магнітного поля й взаємний вплив магнітних перетворювачів. Значення проекцій прискорення сили тяжіння у взаємно перпендикулярних осях блока датчиків ox c y c z c у робочому діапазоні температур можна представити як ~ 0 0 a xc a x0 ( t ) a xc k x ( t ) ~ k y (t) 0 a y c a y0 ( t ) , (4) a y c 0 ~ a zc 0 0 k z ( t ) a zc a z0 ( t ) де: ~ a xc f11 f12 f13 A x a x 0 ~ , a y c f 21 f 22 f 23 A y a y 0 ~ a zc f 31 f 32 f 33 A z a z0 a k x (t ) , k y ( t ) , k z (t ) , a x0 ( t ) , a y 0 ( t ) , a z0 ( t ) - коефіцієнти перетворення й зміщення нуля каналів вимірювання прискорення, які запам'ятовуються або представляються аналітично як функції температури. При вимірюванні напруженості магнітного поля перетворювачами, що мають дрейф вихідного сигналу в діапазоні температур експлуатації, обчислення проводяться за аналогією із залежностями (4), а саме 0 0 ~ r x 0 ( t ) rxc r xc k rx ( t ) ~ k ry ( t ) 0 ry c r y 0 ( t ) , (4') r y c 0 rzc 0 0 k rz ( t ) ~ rz0 ( t ) rzc де ~ m11 m12 m13 R x r x0 rxc ~ ry c m 21 m 22 m 23 R y r y0 . ~ m 31 m 32 m 33 R z rz0 rzc При вимірюваннях кутової швидкості обертання Землі трійкою датчиків кутової швидкості, вихідний сигнал яких змінюється в діапазоні температур експлуатації при нерухомій основі, обчислення проводяться по залежностях аналогічних (4), а саме ~ 0 0 xc x0 ( t ) xc k x ( t ) ~ k y ( t ) 0 y c y0 ( t ) , (4") y c 0 ~ zc 0 0 k z ( t ) zc z0 ( t ) де 3 UA 120655 U 5 10 15 ~ xc p11 p12 p13 x x0 ~ . y c p 21 p 22 p 23 y y0 ~ zc p 31 p 32 p 33 z z0 Величина поправок індивідуальна для кожного блока датчиків і визначається наступними факторами. Нехай система координат ox c y c z c є базовою (будівельною) системою блока датчиків, по осях якої повинні бути закріплені осі чутливості первинних вимірювачів: акселерометрів, датчиків кутової швидкості й магнітометрів. Оскільки поворот датчика навколо осі чутливості не призводить до спотворення сигналу, задамо двома кутами й можливу орієнтацію осі чутливості кожного компонентного вимірювача щодо системи координат ox c y c z c . На кресленні показана можлива орієнтація осей чутливості первинних вимірювачів відносно базової системи координат, що враховує геометричні похибки виготовлення посадкових місць під первинні вимірювачі й невідповідності напрямків осей вимірювачів відносно корпуса. Вирази для вихідних сигналів акселерометрів A x , A y , A z , що враховують перекоси осей чутливості відносно базової системи координат, а також індивідуальність коефіцієнтів перетворення K ax , K ay , K az і нульових сигналів A x0 , A y 0 , A z0 мають вигляд: sin ax cos ax a xc A x0 k ay cos ay cos ay sin ay cos ay a y c A y0 , 0 sin az cos az cos ax cos ax a zc A z0 a zc - проекції прискорення сили тяжіння, що діють по осях базової системи координат ox c y c z c блока датчиків. Оскільки на практиці кути , 1, то з точністю до членів першого порядку малості вираз прийме вигляд 0 0 1 ax ax a xc A x0 A x k ax 0 ay 1 ay a y c A y0 . A y 0 k ay A z 0 0 k az az az 1 a zc A z0 Система рівнянь розв'язується відносно невідомих проекцій прискорення сили тяжіння за вимірюваннями компонентів, що мають вищезазначені похибки. Розв'язок представимо у вигляді ~ a xc f11 f12 f13 A x a x 0 ~ ,(5) a y c f 21 f 22 f 23 A y a y 0 ~ a zc f 31 f 32 f 33 A z a z0 де: A x k ax A y 0 A z 0 де a xc , a y c , 20 25 f11 f12 f21 f22 f31 f32 0 0 cos ax cos ax 0 sin ay k az sin az f13 Kax f23 ayKay f33 azKaz axKax Kay azKaz sin ax 1 axKax ayKay , Kaz 1 30 ax K ax ax K ax A x0 a x0 K ax K ay ay K ay A y0 . a y0 ay K ay a z0 az K az az K az K az A z0 Як випливає з (5), величина всіх коефіцієнтів визначається множниками типу K i і A i , що мають різні значення при різних температурах. Це характерно для будь-якого типу акселерометрів. Тобто, проекції a xc , a y c , a zc , що розраховуються, залежать від температури. Врахування перекосів осей чутливості при розрахунках проекцій дійсне тільки для температури, при якій були знайдені ці перекоси. Враховуючи цей факт, проекції, дійсні для однієї конкретної температури, позначені: ~ xc , ~ y c , ~ zc . a a a 35 Вирази для вихідних сигналів датчиків кутової швидкості x , y , z , які враховують перекоси осей чутливості відносно базової системи координат, а також індивідуальність 4 UA 120655 U 5 коефіцієнтів перетворення K x , K y , K z , і нульових сигналів x0 , y 0 , z0 , для і 1 з точністю до членів першого порядку малості мають вигляд: 0 0 1 x x xc x0 x k x y 0 k y 0 y 1 y y c y0 . z 0 0 k z z z 1 zc z0 Система рівнянь розв'язується відносно невідомих проекцій кутової швидкості обертання Землі за вимірюваннями компонентів, що мають вищезазначені похибки. Розв'язок і виведення рівнянь аналогічні (5). ~ xc p11 p12 p13 x x0 ~ , (6) y c p 21 p 22 p 23 y y0 ~ zc p 31 p 32 p 33 z z0 де: p11 p12 p 21 p 22 p 31 p 32 p13 K x p 23 y K y p 33 z K z x K x K y z K z x K x y K y K z 1 , 1 10 x K x x K x x0 x0 K x K y y K y y0 . y0 y K y z0 z K z z K z K z z0 Вирази для вихідних сигналів перетворювачів магнітного поля R x , R y , R z , що враховують розузгодження осей чутливості датчиків з базовою системою координат, індивідуальність коефіцієнтів перетворення K rx , K ry , K rz , нульових сигналів R x 0 , R y 0 , R z0 , аналогічно запишемо у вигляді 15 R x k rx R y 0 R z 0 0 k ry 0 0 cos rx cos rx 0 sin ry k rz sin rz sin rx cos ry cos ry sin rz cos rz ' sin rx cos rx rxc R x0 ' sin ry cos ry ry c R y0 , ' cos rx cos rx rzc R z0 ' ' ' де r xc , r y c , r zc - проекції вектора напруженості сумарного магнітного поля Землі й поля завад, що діють по осях системи координат ox c y c z c блока датчиків. Вирази, що описують ' ' ' зв'язок проекцій напруженості магнітного поля Землі r xc , r y c , r zc з проекціями r xc , r y c , r zc , описані в літературі [3]. Вони мають вигляд: 20 r ' r xc q * q12 q13 r xc q x0 xc 11 ' * r y c r y c q 21 q 22 q 23 r y c q y0 * ' q rzc rzc 31 q 32 q 33 rzc q z0 * * або при q11 q11 1 , q 22 q * 1 , q 33 q 33 1 22 q q12 q13 rxc q x0 11 q 21 q 22 q 23 ry c q y0 , (7) rzc q z0 q31 q32 q33 i, j 1...3 - параметри, що визначають викривлення проекцій вектора напруженості магнітного поля Землі "м'яким у магнітному відношенні" залізом елементів конструкції блока датчиків і перехресними зв'язками між перетворювачами магнітного поля; q x0 , q y0 і qz0 r ' xc ' ry c ' rzc де q ij , 25 проекції постійного магнетизму ("твердого в магнітному відношенні заліза") елементів конструкції блока датчиків. Якщо вираз (7) підставити в залежності для вихідних сигналів перетворювачів магнітного поля, то з урахуванням і 1, маємо 5 UA 120655 U R x k rx R y 0 R z 0 0 k ry 0 0 1 0 ry k rz rz rx 1 rz rx q11 q12 ry q 21 q 22 1 q 31 q 32 ' q13 rxc R x0 ' q 23 ry c R y0 ' q 33 rzc R z0 або R x n11 n12 R y n 21 n 22 R z n 31 n 32 де: n13 rxc R * 0 x n 23 ry c R * 0 , y n 33 rzc R * 0 z n11 K rx (q11 q 21 rx q 31 rx ); n13 K rx (q13 q 23 rx q 33 rx ); n12 K rx (q12 q 22 rx q 32 rx ); n 21 K ry ( q11 ry q 21 q 31 ry ); n 22 K ry ( q 21 ry q 22 q 32 ry ); 15 20 n 32 K rz (q12 rz q 22 rz q 32 ); n 33 K rz (q13 rz q 23 rz q 33 ); 10 n 23 K ry ( q13 ry q 23 q 33 ry ); n 31 K rz (q11 rz q 21 rz q 31 ); 5 R * 0 K rx (q x0 q y0 rx q z0 rx ) R x0 ; x R * 0 K ry ( q x0 ry q y0 q z0 ry ) R y0 ; R * K (q q q ) R . y z0 rz x 0 rz y 0 rz z0 z0 Система рівнянь розв'язується відносно невідомих проекцій напруженості магнітного поля Землі за вимірюваннями компонентних перетворювачів магнітного поля, що мають вищезазначені похибки, і в умовах магнітних завад. Розв'язок має вигляд ~ m11 m12 m13 R x r x0 rxc ~ , (8) ry c m 21 m 22 m 23 R y r y0 ~ m 31 m 32 m 33 R z rz0 rzc де: 1 1 rx0 n11 n12 n13 R * 0 m11 m12 m13 n11 n12 n13 x m21 m22 m23 n21 n22 n23 , ry0 n 21 n 22 n 23 R * 0 . y rz0 n 31 n 32 n 33 R * m31 m32 m33 n31 n32 n33 z0 Відповідно до отриманих рівнянь (5), (6) і (8), у процесі налагодження блока датчиків необхідно визначити значення чотирьох поправочних коефіцієнтів для кожного каналу розрахунків відповідних проекцій. Визначення поправочних коефіцієнтів належить до задач параметричної ідентифікації, для яких розроблені ефективні алгоритми розрахунків. На прикладі однієї системи, що складається з двох рівнянь, розв'яжемо задачу класичним методом Гауса, на основі якого розроблені як пакетні, так і рекурентні алгоритми ідентифікації. Згідно із системою (5), перше рівняння має вигляд: ~ f A f A f A a . a xc 11 x 12 y 13 z x0 Опускаючи проміжні викладки, запишемо вирази для знаходження коефіцієнтів f11 , f12 , f13 , a x0 25 30 1 ˆ a x0 1 ~ 1 ... 1 1 A x1 A y1 A z1 1 1 ... 1 a xc1 ~ 1 A ~ f11 A x1 A x 2 ... A xN x 2 A y 2 A z 2 A x1 A x 2 ... A xN a xc2 , ~ ... ... A y1 A y 2 ... A y N ... f12 A y1 A y 2 ... A y N ... ... ~ ~ A z1 A z2 ... A zN 1 A xN A y N A zN A z1 A z2 ... A zN a xcN f13 ˆ ˆ ˆ де f11 , f12 , f13 , a x0 - оцінки відповідних коефіцієнтів f11 , f12 , f13 , a x0 ; A i1 , A i2 , A iN ˆ - вихідні сигнали акселерометрів в 12,..., N положеннях приладу; ~ xc1 , ~ xc2 , ~ xcN (i x, y, z) a a a , відомі значення проекцій вектора прискорення сили тяжіння в положеннях блока 12,..., N . , Для визначення всіх 36 коефіцієнтів (12 для компонентів вектора прискорення сили тяжіння, 12 для компонентів кутової швидкості й 12 для компонентів вектора напруженості магнітного поля Землі) розв'язуються ще 8 аналогічних систем. Необхідний мінімум вимірювань N чотири. Однак у реальних умовах, вимірювання проводяться зі скінченною точністю, мають 6 UA 120655 U 5 випадкову складову похибки вимірювання й проводяться в просторових положеннях, заданих також зі скінченною точністю. Тому, рекомендується виконувати більше чотирьох вимірювань. Розрахункові значення a i0 й ri0 будь-якого компонента ai , i або ri для двох різних просторових положень блока датчиків у робочому діапазоні температур можна представити у вигляді a ip1 K( t )a i1 a i0 ( t ) , a ip1 K( t )a i2 a i0 ( t ) . Оскільки після введення поправок, згідно з (5), (6) і (8), при температурі налаштування блока датчиків виконується умова K(t) 1 , a i0 ( t ) 0 , то розрахункові значення a ip (при температурі 10 15 20 25 30 35 налаштування) відповідають дійсним проекціям ai у процесі нагрівання-охолодження блока в робочому діапазоні температур. Нагріваючи й охолоджуючи в робочому діапазоні температур блок датчиків у двох різних просторових положеннях, запам'ятовуємо поточну температуру й значення проекцій, розрахованих із залежностей (5), (6) і (8). З масивів значень визначаємо величини K i і a i0 як функції температури, а саме a ip1 a ip2 a a ip2 (a i1 a i2 )K(t ) , a i0 (t ) ip1 , K( t ) a i1 a i2 2 де a i1 , a i2 - розраховані значення проекцій при температурі, рівній температурі налагодження блока датчиків, що входить у робочий діапазон температур; a ip1 , a ip 2 розраховані значення проекцій при поточній температурі робочого діапазону в процесі нагрівання й охолодження. Розраховані значення, K i і a i0 можна зберігати в пам'яті, як дискретний масив з визначеним кроком по температурі або апроксимувати аналітичною функцією. У процесі розрахунків проекцій прискорення сили тяжіння, проекцій кутової швидкості й напруженості магнітного поля необхідно одночасно з вимірюванням вихідних сигналів фіксувати температуру всередині блока датчиків. А далі ввести поправки у вимірювання згідно з (5), (6) і (8), використовуючи коефіцієнти, розраховані для температури налагодження, і по значенню температури ввести поправки по залежностях (4), (4') і (4"). Джерела інформації: 1. Ковшов, Г.Н. Инклинометры (Основы теории и проектирования)/ Г.Н. Ковшов, Р.И. Алимбеков, А.В. Жибер. - Уфа: Гилем, 1998. - 380 с. 2. Пат. 2085852 Рос. Федерація, МПК G01C 25/00 (1995.01), 9/00 (1995.01). Способ настройки инклинометра и контроля достоверности результатов [Текст]/ Н.И. Горбатенков (RU), A.M. Дремин (RU), А.В. Жилинский (RU), О.С. Колосов (RU), Е.А. Салов (RU), А.В. Федоров (RU), Д.А. Федоров (RU), Н.А. Цепляев (RU). - RU 9494018200, заявл. 18.05.1994; опубл 27.07.1997: іл. 3. Кожухов В.П. Магнитные компасы: Учебник для ВУЗов морск. трансп./ В.П. Кожухов, В.В. Воронов, В.В. Григорьев. -М.: Транспорт, 1981, - 212 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Спосіб калібрування блока датчиків системи орієнтації, що включає установку блока в кантувач на калібрувальну поверхню в робочому діапазоні температур, визначення параметрів неточності виставлення осей чутливості первинних перетворювачів, вимірювання проекцій в осях чутливості первинних перетворювачів, обрахунок проекцій в осях системи координат блока, який відрізняється тим, що блок датчиків установлюють на калібровані поверхні вздовж довільних, але заздалегідь відомих напрямків, число яких не менше двох, і послідовно задають вимірювальні положення шляхом переустановлення кантувача на інші грані з числом різних значень кутів повороту не менше двох на кожному напрямку, параметри неточності виставлення осей чутливості визначають разом з параметрами калібровки чутливих елементів, параметрами впливу магнітних полів-перешкод і взаємного впливу первинних вимірювачів магнітного поля, установлюють послідовно блок датчиків уздовж довільно заданих двох напрямків, визначають зміну розрахункових значень в осях системи координат блока в робочому діапазоні температур, а проекції ui (i x, y, z) вектора прискорення сили тяжіння, кутової швидкості обертання й вектора напруженості магнітного поля обчислюють в осях системи координат блока за 7 UA 120655 U 5 вимірюваннями Ux , Uy , Uz в осях чутливості первинних вимірювачів і температури t блока датчиків ut K(t )~i ui0 (t ) , u де K( t ) , ui0 (t ) - масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури, ~ k U k U k U k , ui i1 x i2 y i3 z i0 де k i0 , k i1 , k i2 , k i3 - параметри, знайдені при температурі налагодження блока. 10 Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 25/00, G01C 9/00
Мітки: системі, орієнтації, спосіб, калібрування, блока, датчиків
Код посилання
<a href="https://ua.patents.su/10-120655-sposib-kalibruvannya-bloka-datchikiv-sistemi-oriehntaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб калібрування блока датчиків системи орієнтації</a>
Безплатформний навігаційний комплекс з інерціальною системою орієнтації на “грубих” чутливих елементах і спосіб корекції його інерціальних датчиків
Номер патенту: 103858
Опубліковано: 25.11.2013
Автори: Греков Миколай Олександрович, Греков Олександр Миколайович, Алексеев Сергій Юрійович
МПК: G01C 23/00
Мітки: системою, навігаційний, інерціальною, комплекс, корекції, грубих, безплатформний, чутливих, спосіб, інерціальних, орієнтації, датчиків, елементах
Формула / Реферат:
1. Безплатформний навігаційний комплекс з інерціальною системою орієнтації на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і містить розташовані за трьома ортогональними осями три акселерометри і три датчики кутових швидкостей, який відрізняється тим, що він додатково містить підключені до обчислювальної платформи трьохосьовий магнітний компас і гідростатичний блок нахилу, що містить три диференціальних...
Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів
Номер патенту: 31547
Опубліковано: 15.12.2000
Автори: Орлов Валерій Олександрович, Нікітінський Михайло Павлович, Абарбарчук Ігор Азарович, Браз Вадим Давидович
МПК: G01L 1/22
Мітки: натягу, силовимірювальних, калібрування, контролю, повірки, датчиків, армоканатів, системі, спосіб
Текст:
...Індуктованих показань силовимірювального датчика , що ка лібрують та зразкових засобів вимірювань під час впливу на них з £ даних зусиль, провести точне масштабування апаратури Індикації СІ ловимірювальних датчиків, що калібрують, яке надає їм можливість з необхідною точністю постійно визначати натяг армоканату . Новина способу полягас у створенні таких вихідних умов для п чатку вимірювань, зв'язаних з особливостями вбудови...
Пристрій для калібрування датчиків полум’я
Номер патенту: 111006
Опубліковано: 10.03.2016
Автори: Годунов Ігор Михайлович, Жуков Павло Петрович, Матвієнко Микола Павлович
МПК: G08B 17/00, G08B 29/20
Мітки: калібрування, пристрій, полум'я, датчиків
Формула / Реферат:
Пристрій для калібрування датчиків полум'я, що включає кнопку "ПУСК", підпалювач, датчик полум'я, трубу, в якій по всій довжині встановлені фотодіоди, виходи яких підключені до блока перетворення спалаху полум'я в імпульси, який відрізняється тим, що введені схема "І", "R-S"-тригер, дешифратор та блок індикації, при цьому один вхід схеми "І" з'єднаний з виходом блока перетворення спалаху полум'я в...
Спосіб калібрування датчиків температури
Номер патенту: 72054
Опубліковано: 10.08.2012
Автори: Сипко Микола Іванович, Шварц Марина Михайлівна, Іващенко Олексій Миколайович, Шварц Юрій Михайлович, Копко Дмитро Петрович
МПК: G01K 15/00
Мітки: температури, датчиків, спосіб, калібрування
Формула / Реферат:
Спосіб високоточного калібрування взаємозамінних датчиків температури, який включає встановлення та стабілізацію заданої температури в кріостаті або термостаті, вимірювання вихідного сигналу термометра - падіння напруги при постійному прямому струмі в точках робочого діапазону температур, розрахунок термометричних характеристик з використанням кубічних сплайнів з вільними вузлами, який відрізняється тим, що вимірювання вихідного сигналу...
Спосіб калібрування інерціальних датчиків
Номер патенту: 106614
Опубліковано: 25.09.2014
Автор: Даше Деміен
МПК: G01P 21/00, G01C 25/00
Мітки: датчиків, калібрування, інерціальних, спосіб
Формула / Реферат:
1. Спосіб калібрування інерціальних датчиків робочого обладнання, який включає: збір даних від одного або більше інерціальних датчиків та від одного або більше датчиків температури, розташованих поблизу інерціальних датчиків, коли робоче обладнання не в роботі, та оновлення моделі температурної систематичної похибки для інерціальних датчиків даними, зібраними від інерціальних датчиків та датчиків температури, причому...
Попередній патент: Спосіб одночасного визначення цифлуфенаміду та дифеноконазолу в одній пробі води
Наступний патент: Спосіб визначення ефективності лікування експериментальної пудендопатії
Випадковий патент: Суміш для виготовлення вогнезахисного покриття