Пристрій для обслідування внутрішньої частини димових труб
Номер патенту: 15681
Опубліковано: 30.06.1997
Автори: Солянік Віктор Іванович, Височанський Анатолій Франкович, Філіппов Валерій Іванович, Хірін Микола Димитрович
Текст
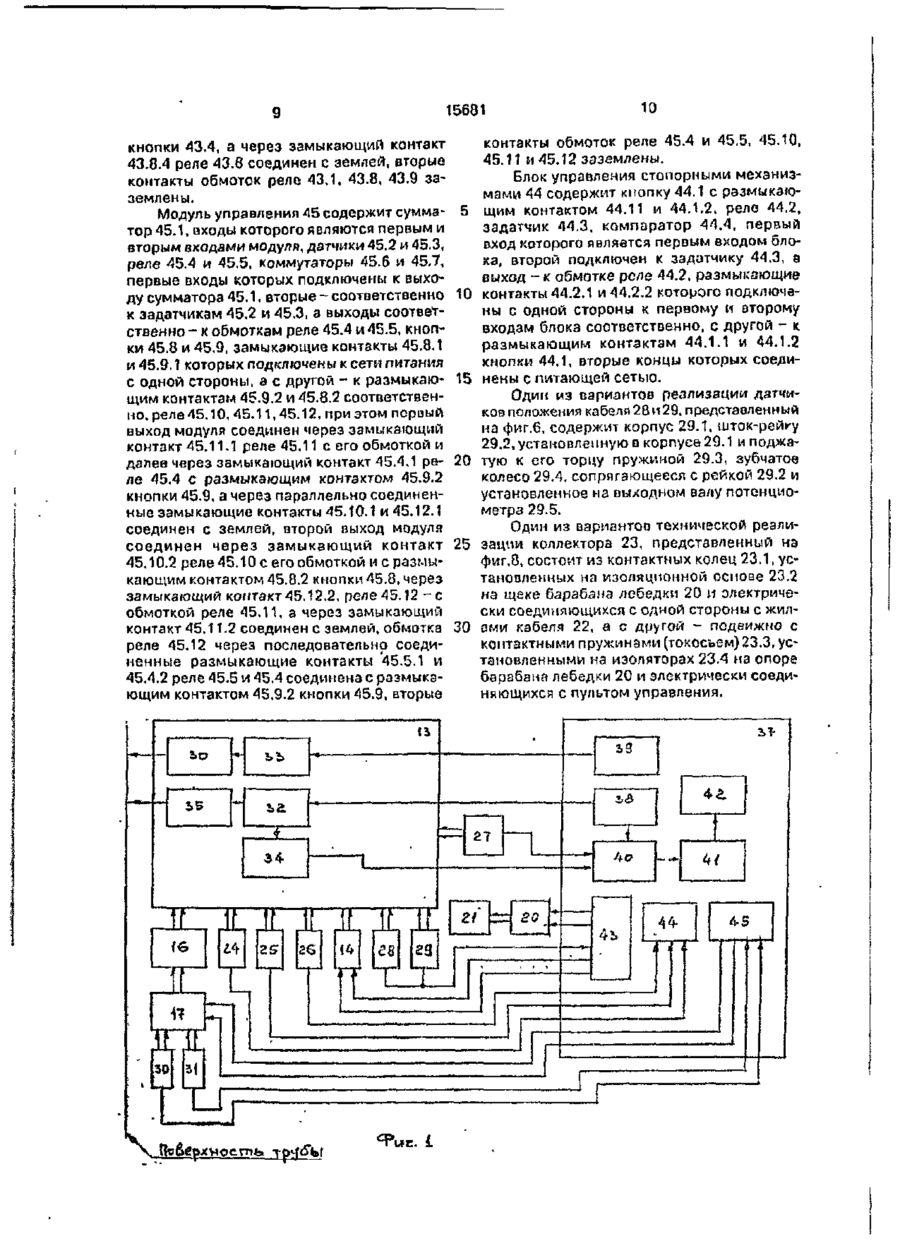
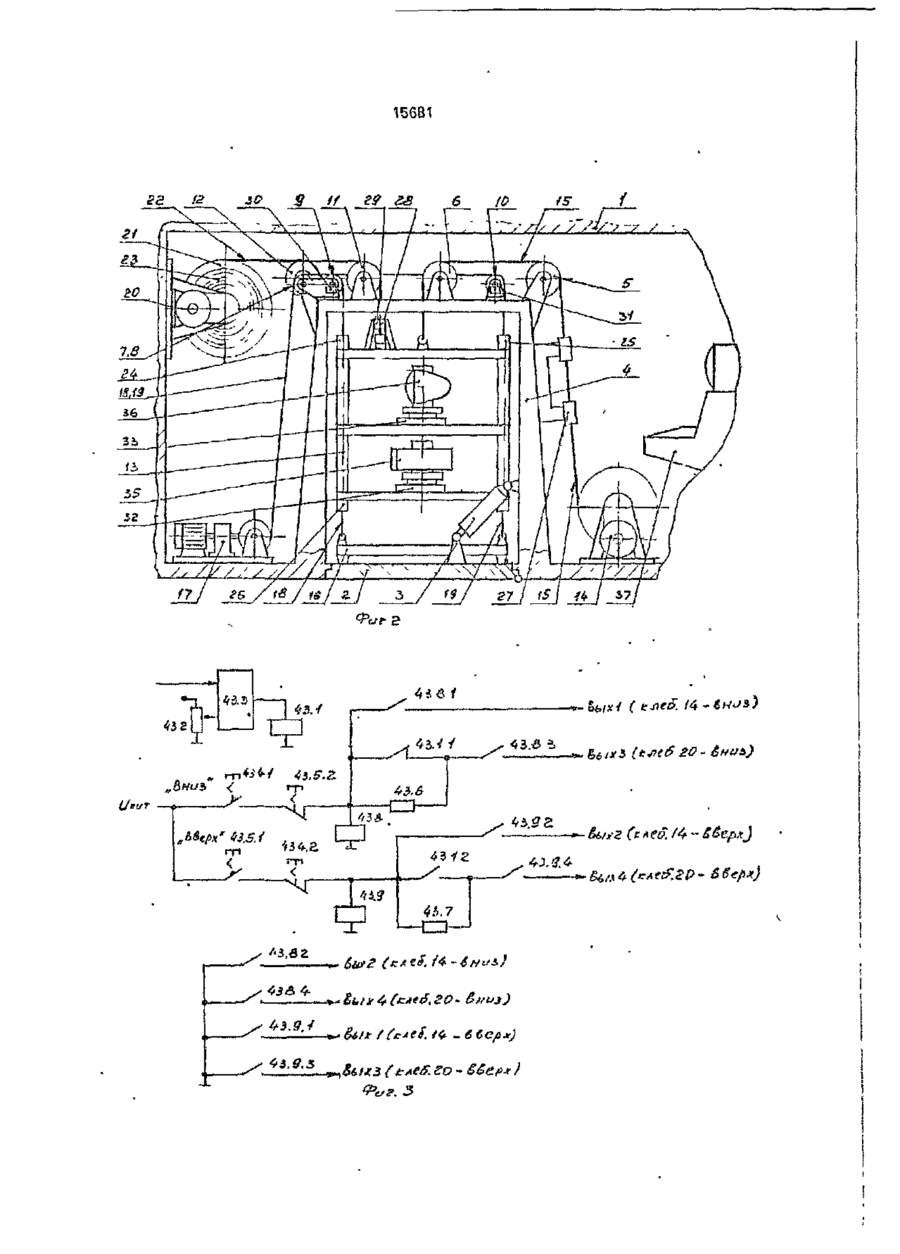
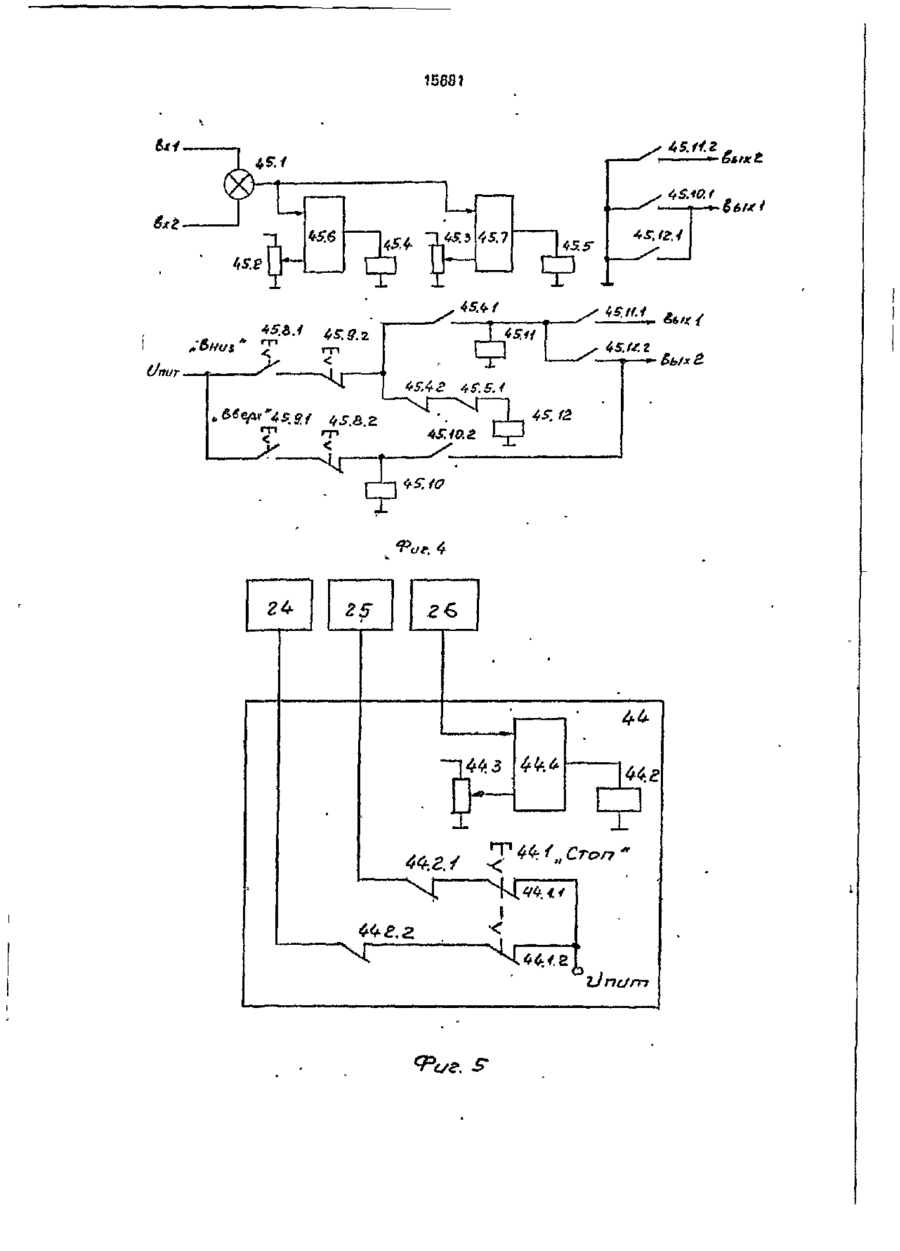
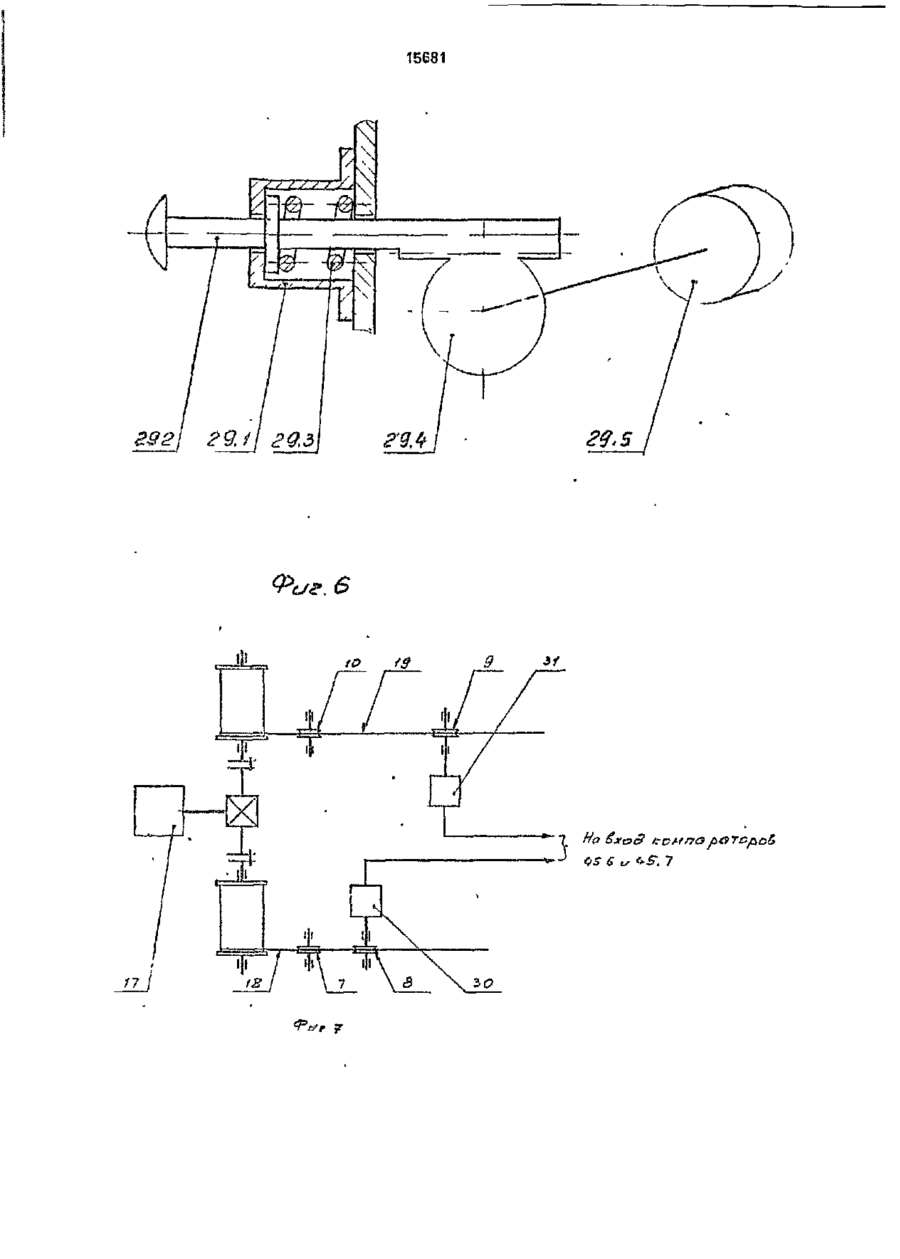
1. Устройство для обследования внутренней части дымовых труб, содержащее опору, два полиспастных блока, установленных на опоре, лебедку, тяговый трос, закрепленный одним концом на барабане лебедки и проходящий -через эти блоки, платформу, закрепленную на втором конце тягового троса под опорой, балансир, стабилизирующие тросы, закрепленные одними концами на бэлансмре и проходящие через платформу, два стопорных механизма и датчики скорости перемещения платформы, установленные на платформе и кинематически связанные со стабилизирующими тросами, систему контроля, модуль управления, блок управления стопорными механизмами, при этом первый и второй выходы модуля управления подключены к лебедке, обмотки управления стопорных механизмов и датчик скорости перемещения платформы соответственно соединены с входом и первым и вторым выходами блока управления стопорными механизмами, о т л и ч а ю щ е е с я тем, что оно снабжено дополнительными шестью полиспастными блоками, установленными на опоре, дополнительной лебедкой, на барабанах которой закреплены вторые концы стабилизирующих тросов, проходящих через третий, четвертый, пятый и шестой полиспастные блоки, двумя датчиками усилия, кинематически связанными со стабилизирующими тросами и установленными в пульте управления, дополнительным модулем управления, к, первому и второму входам которого подключены датчики усилия, а первый и второй выходы соединены со входами дополнительной лебедки, второй дополнительной лебедкой, барабан которой снабжен электрическими коллекторами и на которой намотан электрический кабель, проходящий через седьмой и восьмой полиспасткые блоки и соединенные с электрическим входом платформы, двумя датчиками положения кабеля, установленными на платформе и электрически соязанными с первым входом основного модуля управления, третий и четвертый выходы которого подключены ко оторой дополнительной лебедке. 2. Устройство п о п . 1, о т л и ч а ю щ е е с я тем, что основной модуль управления содержит четыре реле, задатчик, компаратор, первый вход которого является первым входом модуля, второй соединен с зэдатчиком, а выход - с обмоткой первого реле, две кнопки, замыкающие контакты которых подключены к сети питания с одной стороны, а с другой встречно к размыкающим контактам первая - второй, а вторая - первой кнопки, два резистора, при этом первый выход модуля соединен через первый замыкающий контакт второго реле с его обмоткой и размыкающим контактом второй кнопки, а чорез первый замыкающий контакт третьего реле соединен с землей, второй выход модуля соединен через второй замыкающий контакт третьего реле с его обмоткой и размыкающим контактом первой кнопки, а через второй замыкающий контакт второго реле соединен с землей, третий аыход модуля соединен через третий замыкающий комтакт второго реле и пероый размыкающий контакт первого реле, шунтирующий пер О 15681 4 вый резистор, с размыкающим контактом второй кнопки, а через третий замыкающий контакт третьего реле соединен с землей, четвертый выход модуля соединен через четвертый замыкающий контакт третьего реле и второй замыкающий контакт первого реле, шунтирующий второй резистор, с размыкающим контактом первой кнопки, а черезчетвертый замыкающий контакт второго реле соединен с землей, вторые контакты обмоток первого, второго и третьего реле заземлены. 3. Устройство по пп.1 и 2, о т л и ч а ющ е е с я тем, что дополнительный модуль управления содержит сумматор, входы которого являются первым и вторым входами модуля, два задатчика, пять реле, два компаратора, первые входы которых подключены к выходу сумматора, вторые соответственно к первому и второму зпдатчикам, а выходы соотиетстоенно к обмоткам перпого и второго реле, две кнопки, замыкающие контакты которых подключены к сети питания с одной стороны, а с другой встреч но к размыкающим контактам первая - пторой, а вторая - первой кнопки, при этом первый выход модули соединен через первый замыкающий контакт четоертого реле с обмоткой четвертого реле и далее через перпый замыкающий контакт первого реле с размыкающим контактом второй кнопки, а через параллельно соединенные первые замыкающие контакты третьего и пятого реле соединен с землей, второй выход модуля соединен через иторой замыкающий контакт третьего реле с его обмоткой и с размыкающим контактом первой кнопки, через второй замыкающий контакт пятого реле с обмоткой четвертого роле, через второй замыкающий контакт четвертого реле соодинеп с землей, обмотка пятого реле через последовательно соединенные второй и первый размыкающие контакты первого и второго реле соответственно соединена с размыкающим контактом второй кнопки, вторые контакты обмоткой перпого, второго, третьего, четвертого и пятого роле заземлены. Изобретение относится к технологическому оборудованию для обследования внутренней поверхности дымовых труб энергетических станций. Наиболее близким по технической сущности к заявляемому является устройство [1], содержащее первые опоры, закрепленные на оголовке трубы, вторую опору, подвешенную на тросзх на первых опорах с возможностью перемещения поперек отверстия трубы, первый и второй полиспастные блоки, установленные па второй и первой опорах соответственно, лебедку, установленную снаружи трубы, тяговый трос, закрепленный одним концом на барабане лебедки и проходящий через первый и второй блоки, платформу, закрепленную на стером конце тягового троса внутри трубы, балансир, установленный внутри трубы, стабилизирующие тросы, проходящие через платформу и закрепленные с одной стороны на второй опоре, а с другой - на балансире, первый и второй стопорные механизмы и датчик скорости перемещения, установленные на платформе и кинематически связанные со с т а б и л и з и р у ю щ и м и т р о с а м и , систему контроля, модуль управления лебедки, блок управления стопорными механизмами (а дальнейшем ВУСМ), при этом модуль управления подключен к лебедке, обмотки управления первого и второго стопорных механизмов и выход датчика скорости перемещения платформы соответственно соединены с входом и первым и вторым выходами блока управления стопорными механизмами. Однако монтаж данного устройства перед обследованием трубы и демонтаж его после обследования чрезвычайно трудоемок, что значительно увеличивает время, затрачиваемое на обследование трубы, а следовательно время простоя. Действительно, укрупнено монтаж (демонтаж) устройства связан со следующими операциями: монтаж опор (первых) па оголовке трубы, подсоска второй опоры па тросах на первых опорах, монтаж балансира и платформы па основании трубы (возле газохода), монтаж лебедки снаружи трубы, зачалкз и монтаж тросов тягового и стабилизирующих и т.д. Естественно, что с временем простоя трубы связан вывод на это время из эксплуатации опергетических блоков станции, снижение обьома вырабатываемой ею энергии. Кроме того, нахождение на трубе и внутри ее людей в процессе монтажа м демонтажа устройства о случае а в а р и й н о г о состояния грубы опасно для жизни монтажпиков, так как в случае отслоения и обвала 5 10 15 20 25 30 15681 6 чены к сети питания с одной стороны, а с разрушившейся футеровки возможны травдругой - встречно - к замыкающим контакмы. там, первая - второй, а вторая - первой Целью изобретения является сокращекнопки, два резистора, при этом первый выние простоя трубы при обследовании, повы5 ход модуля соединен через первый замыкашение безопасности работы персонала при ющий контакт второго реле с его обмоткой обследовании. и размыкающим контактом второй кнопки, Поставленная цель достигается тем, что а через первый замыкающий контакт третьустройство, содержащее опору, дэа полиего реле соединен с землей, второй выход спастных блока, устанооленных на опоре, 10 модуля соединен через второй замыкающий лебедку, тяговый трос, закрепленный одним контакт третьего реле с его обмоткой и законцом на барабане лебедки и проходящий мыкающим контактом первой кнопки, а чечерез блоки, платформу, закрепленную на рез второй замыкающий контакт второго отором конце тягового троса под опорой, реле соединен с землей, третий ВУХОД модубалансир, стабилизирующие тросы, закрепленные одними концами на балансире и 15 ля соединен через третий замыкающий контакт второго реле и первый размыкающий проходящие через платформу, два стопорконтакт первого реле, шунтирующий перных механизма и датчики скорости перемевый резистор, с размыкающим контактом щения платформы, установленные на второй кнопки, а через третий замыкающий платформе и кинематически осязанные со 20 контакт третьего реле соединен с землей, стабилизирующими тросами, систему кошчетвертый выход модуля соединен через роля, модуль управления, блок управления четвертый замыкающий контакт третьего стопорными механизмами, при этом первый реле и второй замыкающий контакт первого и второй выходы модуля управления подреле, шунтирующий второй резистор, с разключены к лебедке, обмотки управления 25 мыкающим контактом первой кнопки, а честопорных механизмов и выход датчика скорез четвертый замыкающий контакт второго рости перемещения платформы соответстреле соединен с землей, вторые контакты венно соединены с входом л первым и обмоток первого, второго и третьего реле оторым выходами блока управления стопорзаземлены. ными механизмами дополнительно снабжено шестью полиспастнымм блоками, 30 Дополнительный модуль управления установленными на опоре, дополнительной содержит сумматор, входы которого являлебедкой, из барабанах которой закреплеются первым и вторым входами модуля, два ны вторые концы стабилизирующих тросоп, зздатчикз, пять реле, два компаратора, перпроходящих через третий, четвертый, пятый вые входы которых подкпючены к выходу и шестой полиспастиые блоки, двумя датчи- 35 су?иматора, вторые соответственно - к перками усилия, кинематически связанными со вому и второму задатчикам, а выходы - состабилизирующими тросами, установленответственно к обмоткам первого и второго ными в пульте управления дополнительным реле, две кнопки, замыкающие контакты комодулем упраоления, к первому и второму торых подключены к сети питания с одной •ходам которого подключены датчики уси- 40 стороны, а с другой - встречно - к размыкалия, а первый и второй выходы соединены ющим контактам первая - второй, з вторая со входами дополнительной лебедки, втопервой кнопки, при этом первый выход морой дополнительной лебедки, барабан котодуля соединен через первый замыкающий рой снабжен электрическими коллекторами контакт четвертого реле и обмоткой четвери на которой намотан электрический кабель, 45 того реле и далее через первый замыкаюпроходящий через седьмой и восьмой полищий контакт первого реле с размыкающим спастные блоки и соединенный с электричеконтактом Бторой кнопки, з через паралским входом платформы, двумя датчиками лельно соединенные первые замыкающие положения кабеля, установленными на контакты третьего и пятого реле соединен с платформе и электрически связанными с 50 землей, второй выход модуля соединен чапервым входом основного модуля управле• рез второй замыкающий контакт третьего ния, третий и четвертый выходы которого реле с его обмоткой и с размыкающим конподключены ко второй дополнительной летактом первой кнопки, через агорой ззмибедке. кающий контакт пятого реле - с обмоткой Основной модуль управления содержит 55 четвертого реле, а через второй замыкающий контакт четвертого реле соединен с четыре реле, задатчик, компаратор, первый землей, обмотка пятого репе через последовход которого является первым входом мовательно соединенные второй и первый раздуля, второй - соединен с задатчиком, а 1 мыкающие контакты первого и второго реле сыход - с обмоткой первого реле, две кнопсоответственно соединена с размыкающим ки, замыкающие контакты которых подклю 15G81 контактом второй кнопки, вторые контакты обмоток парного, второго, третьего, четвертого и пятого реле заземлены. Ь'з фиг.1 показана структурная схема устройства; на фиг.З - общий пид устройстза; на фиг.З - принципиальная схема олектрическая третьего модуля управления; на фиг.А ~ принципиальная электрическая схема четвертого модуля управления; на фиг.5- принципиальная электрическая схемз БУСМ; На фиг.6 - один из вариантов реализации датчика положения кабеля; па фиг,7 - кинематическая схема тросовой системы второй лебедки; па фиг.8 - один из пэриантов реализации конструкции коллектора. В приведенном варианте реализации опора установлена п вертолете, возможны и другие иарианты крепления опоры, например, на оголовке трубы. Устройство содержит вертолет 1 с люком 2, открываемым гидроцилиидром 3, опору А, установленную над шоком 2, полиспастные блоки 5.6,7,8,9,10,11,12, установленные на опоре 4, платформу 13, лебедку 14, тяговый трос 15, проходящий через (Зло 5 10 15 20 25 • КИ 5 И G И ПОДСОЄДИНЄННІ.ІИ С ОДНОЙ CTOpOHtl к платформе 13. ас другой закрепленный па барабане лебедки 14, балансир 16, лебедку 17, стабилизирующие тросы 18 и 19, проходящие через блоки 7,9 и 8,10 соотпетствепно, н а п р а в л я ю щ и е платформы 13 и подсоединенные с одной стороны к балансиру 16, ас другой закрепленные па барабанах лебедки 17, лебедку 20, на барабане 21 которой намотан каб*ель 22, распаянный на коллекторе 23, проходящий через блоки 12 и 11 и подсоединенный к разъему (на чертеже не обозначен) платформы 13, стопорные механизмы 24 и 25 и датчик скорости перомещения 26, установленные на платформо 13 и кинематически связанные со стабилизирующими тросами 10 и 19, датчик перемещения 27 платформы 13 вдоль оси трубы, установленный на опоро 4 и кимемаїичесш связанный с тросом 15, датчики положения кабеля 23 и 29, установленные на платформе 13 и кинематически связанные с кабелем 22, датчики усилия 30 и 31, установленные на блоках 9 и 10 и кинематически связанные с і росами 10 и 19, устройства наведения 32 и 3J, установленный ч^ платформе 13, датчик обратной связи по развороту 34, установленный в устройстве наведения 32, -елекамера 35 и осветитель 3G, установленные на устройствах наведения 32 и 33 соответственно, пульт управления устройством 37, в котором установлены модули управления 38 и 39 устройствами наведения 32 и 33 соответственно, блок смешивания сигналов 30 35 40 45 50 55 40, впдеоконтрольиоз устройства 41,видеомагнитофон 42, третий модуль управления 43, блок управления 44 стопорными механизмами 24 и 25, четпертый модуль управления 45, при этом телекамера 35, устройство наведения 32 и модуль управления 38 последовательно электрически соединены, пыход модуля управления 38 подключен к первому входу блока смешивания сигналов 40, второй вход которого подключен к датчику обратной связи 39, третий - к датчику перемещения 27 платформы 13, а выход - к сходу пидеоконтрольного устройства 41, v, выход/ которого подключен видеомагнитофон 42, осветитель 30, устройство наведения 33, модуль упргтления 38 последовательно соединены, первый вход модуля управления 43 сое/\^\іеи с датчиками положения к?беля 20 и 29, пероым и второй выходы соединены с приполом лебедки 14, а третий и четвертый выходы с приводом лебедки 20, порпый и второй входы модуля управления 45 соединены с датчиками усилил 30 и 31, ЇЇ первый и второй "ыходы с приводом лебедки 17, обмотки управления стопорных механизмов 24 п 25, выход датчика скорости перемещения 2G соответственно соединены с первым входом и первым и вторым выходами блока упрлппомия 44, Модуль управления 43 содержит роле 43.1, задатчик 43.2, комгпратор 43.3, первый вход которого является первым входом модуля, агорой соединен с сіадатчиком 43,2, а виход - с обмоткой рело 43 1, кнопки 43,4 «43,5, замыкающий контакты 43.4,1 и 43.0.1 которых подключены ]•; сети мигания с одной стороны, а с другой-к замыкающим контактам 43,5.2 и 43.4,2 сротретегпенмо, резисторы 43,6 и 43.7, реле 43.Ь и ^3.9, при этом первый выход модуля соединен через замыкающий контакт 43.0.1 реле 43.5,, г. о т обмогкой и замыкающим контактом 43.5.2 кнопки 43.5, а через замыкающий контакт 43.9.1 реле 43.9 соединен с землей, второй выход модуля соединен через замыкающий контакт 43.9,2 реле 43,9 с его обмоткой и замыкающим контактом 43.4,2 кнопки 43,4, а через размыкающий контакт 43,8.2 реле 43.0 соединен с землей, третий выход модуля соединен через замыкающий контакт 43.8.3 реле 43.В и размыкающий контакт 43.1.1 реле 43 I шунтирующий резистор 43.6, с размыкающим контактом 43.5.2 кнопки 43.5, а через замыкающий контакт 43.9.3 реле '13,9 с землей, четвертый выход модуля соединен через замыкающий контакт 43.9.4 реле 43.9 и замыкающий контакт 43.1.2 реле 43.1, шунтирующий резистор 43.7, с размыкающим контактом 43,4.2 10 15681 кнопки 43.4, а через замыкающий контакт 43.8.4 реле 43.8 соединен с землей, вторые контакты обмоток реле 43,1, 43.8, 43.9 заземлены. Модуль управления 45 содержит сумматор 45.1, входы которого являются первыми вторым входами модуля, датчики 45.2 и 45.3, реле 45.4 и 45.5, коммутаторы 45.6 и 45.7, первые входы которых подключены к выходу сумматора 45.1. вторые - соответственно к задэтчикам 45.2 и 45.3, а выходы соответственно - к обмоткам реле 45.4 и 45.5, кнопки 45.8 и 45.9, замыкающие контакты 45.8.1 и 45.9.1 которых подключены к сети питания с одной стороны, а с другой - к размыкающим контактам 45.9.2 и 45.8.2 соответственно, реле 45.10, 45.11,45.12, при этом первый выход модуля соединен через замыкающий контакт 45.11.1 реле 45.11 с его обмоткой и далее через замыкающий контакт 45,4.1 реле 45.4 с размыкающим контактом 45.9.2 кнопки 45.9, а через параллельно соединенные замыкающие контакты 45.10.1 и 45.12.1 соединен с землей, второй выход модуля соединен через замыкающий контакт 45.10.2 реле 45.10 с его обмоткой и с размыкающим контактом 45.8.2 кнопки 45.8, через замыкающий контакт45.12.2, реле 45.12 - с обмоткой реле 45.11, а через замыкающий контакт 45.11.2 соединен с землей, обмотка реле 45.12 через последовательно соединенные размыкающие контакты 45.5.1 и 45.4.2 реле 45.5 и 45.4 соединена с размыкающим контактом 45.9.2 кнопки 45.9, вторые 10 15 20 25 30 контакты обмоток реле 45.4 и 45.5, 45.10, 45.11 и 45.12 заземлены. Блок управления стопорными механизмами 44 содержит кнопку 44.1 с размыкзющим контактом 44.11 и 44.1.2, реле 44.2, задатчик 44.3, компаратор 44.4, первый вход которого является первым входом блока, второй подключен к задотчику 44.3, а выход - к обмотке реле 44.2, размыкающие контакты 44.2.1 и 44.2.2 которого подключены с одной стороны к первому и второму входам блока соответственно, с другой - к размыкающим контактам 44.1.1 и 44.1.2 кнопки 44.1, вторые концы которых соедийены с питающей сетью. Один из вариантов реализации датчиков положения кабеля 28 и 29. представленный на фиг.6, содержит корпус 29.1, шток-рейку 29.2,установленную в корпусе 29.1 и поджатую к его торцу пружиной 29.3, зубчатое колесо 29.4, сопрягающееся с рейкой 29.2 и установленное на выходном валу потенциометра 29.5. Один из вариантоо технической реализацпи коллектора 23, представленный на фиг,8, состоит из контактных колец 23.1, установленных на изоляционной основе 23.2 на щеке барабана лебедки 20 и электрически соединяющихся с одной стороны с жиломи кабеля 22, а с другой - подвижно с контактными пружинами (токосъем) 23.3, установленными на изоляторах 23.4 на опоре барабана лебедки 20 и электрически соединяющихся с пультом управления. 4 г. 34 п. Ас? 1L го 23 X ILJ v.J uc . L 15681 2г зо § if г? гг в і/еит . ' . **Un , /«. _ б to /s і 15681 t/rtur "Риг. 4 Фиг. S 15681 Фиг. 6 15681 го Фаг. в . Упорчдиик Замовлення Техред М.Моргентал Коректор А. Обручар Тирзж Підписне Державне патентне відомстоо України, 25465S, ГСП, КиГв-ЬЗ, Львівська пл., С Відкрите акціонерне товариство "Патент", м. Ужгород, аул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for inspection of internal part of chimney flues
Автори англійськоюVysochanskyi Anatolii Frankovych, Solianik Viktor Ivanovych, Filippov Valerii Ivanovych, Khirin Mykola Dymytrovych
Назва патенту російськоюУстройство для обследования внутренней части дымовых труб
Автори російськоюВисочанский Анатолий Франкович, Соляник Виктор Иванович, Филиппов Валерий Иванович, Хирин Николай Димитриевич
МПК / Мітки
МПК: B66F 11/04
Мітки: обслідування, пристрій, внутрішньої, димових, частини, труб
Код посилання
<a href="https://ua.patents.su/10-15681-pristrijj-dlya-obsliduvannya-vnutrishno-chastini-dimovikh-trub.html" target="_blank" rel="follow" title="База патентів України">Пристрій для обслідування внутрішньої частини димових труб</a>
Пристрій для дистанційного управління забійними машинами та механізмами
Номер патенту: 7602
Опубліковано: 29.09.1995
Автори: Серебров Леонтій Михайлович, Зворигін Артур Георгієвич, Сілаєв Віктор Іванович, Вейланд Сергій Христофорович, Городецький Анатолій Юлійович, Магілат Генадій Йосипович, Муфель Лев Абрамович, Лагунович Євген Федорович
МПК: E21C 35/24
Мітки: забійними, машинами, управління, механізмами, дистанційного, пристрій
Формула / Реферат:
Устройство для дистанционного управления забойными машинами и механизмами, содержащее пульт управления, включающий кнопки "Стоп" и "Пуск" конвейера, приемный блок, включающий источник постоянного тока, первый вывод которого подключен к первым выводам первого дополнительного и первого исполнительного реле, понижающий трансформатор, один вывод которого подключен к первому проводу линии связи, второй вывод понижающего...
Комутаційний пристрій для рейкових кіл

Номер патенту: 9846
Опубліковано: 30.09.1996
Автори: Чаговець Микола Дмитрович, Подгайчєнко Міхаіл Сєргєєвіч, Крайнов Вадім Федорович, Луковнєва Єлєна Алєксандровна, Капуста Олександр Степанович
МПК: B61L 23/00
Мітки: рейкових, пристрій, комутаційний, кіл
Формула / Реферат:
Коммутирующее устройство для рельсовых цепей, содержащее источник питания, соединенный одним выводом с нагрузкой, триаки, конденсатор, контрольное реле, одна из обмоток которого шунтирована силовой цепью основного триака и в цепь питания которой включен собственный первый размыкающий контакт, в цепь питания второй обмотки контрольного реле включен собственный первый замыкающий контакт, контакты кодового трансмиттера включены через первый...
Привід електродвигуна для дистанційного керування розмикачем контактної мережі
Номер патенту: 17555
Опубліковано: 06.05.1997
Автор: Шумейко Василь Андрійович
МПК: H02H 7/08, H02J 13/00
Мітки: привід, мережі, контактної, керування, електродвигуна, розмикачем, дистанційного
Формула / Реферат:
Привод электродвигателя для дистанционного управления разъединителем контактной сети, содержащий сочлененные друг с другом электродвигатель, редуктор, муфту сцепления, кривошип и выходной шток, предназначенный для подсоединения к штанге вала разъединителя, контакты блокировки включения электродвигателя, установленные по меньшей мере в одной из линий питания электродвигателя, первый и второй блок-контакты, замкнутые в положении привода...
Пристрій для управління симістором
Номер патенту: 1081
Опубліковано: 30.12.1993
Автор: Соколов Вячеслав Федорович
МПК: H02M 1/08
Мітки: симістором, управління, пристрій
Формула / Реферат:
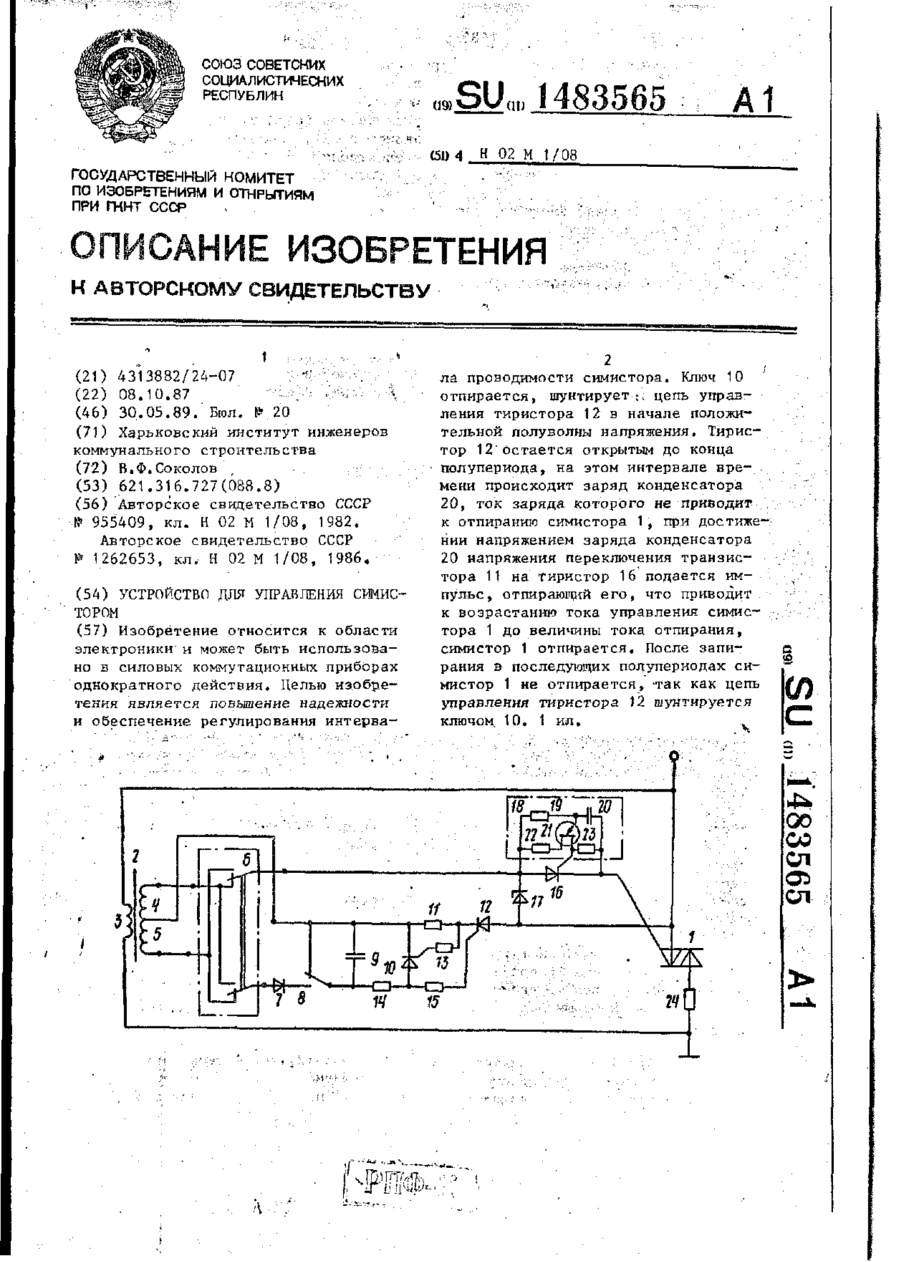
Устройство для управления симистором, содержащее пусковой диод, трансформатор, первичная обмотка которого подключена к сети переменного тока, крайние выводы вторичной обмотки соединены с входами переключателя полярности, имеющего два выхода, средняя точка вторичной обмотки подключена к отрицательной обкладке накопительного конденсатора, соединенной с выходом вспомогательного ключа, выход которого подключен к точке соединения первого и второго...
Іскробезпечний пристрій дистанційного керування
Номер патенту: 9316
Опубліковано: 30.09.1996
Автори: Резнік Леонід Бенціонович, Янопуло Володимир Миколайович, Галкін Василь Дмитрович, Лоцманов Михайло Сергійович
МПК: G05B 9/00
Мітки: пристрій, дистанційного, іскробезпечний, керування
Формула / Реферат:
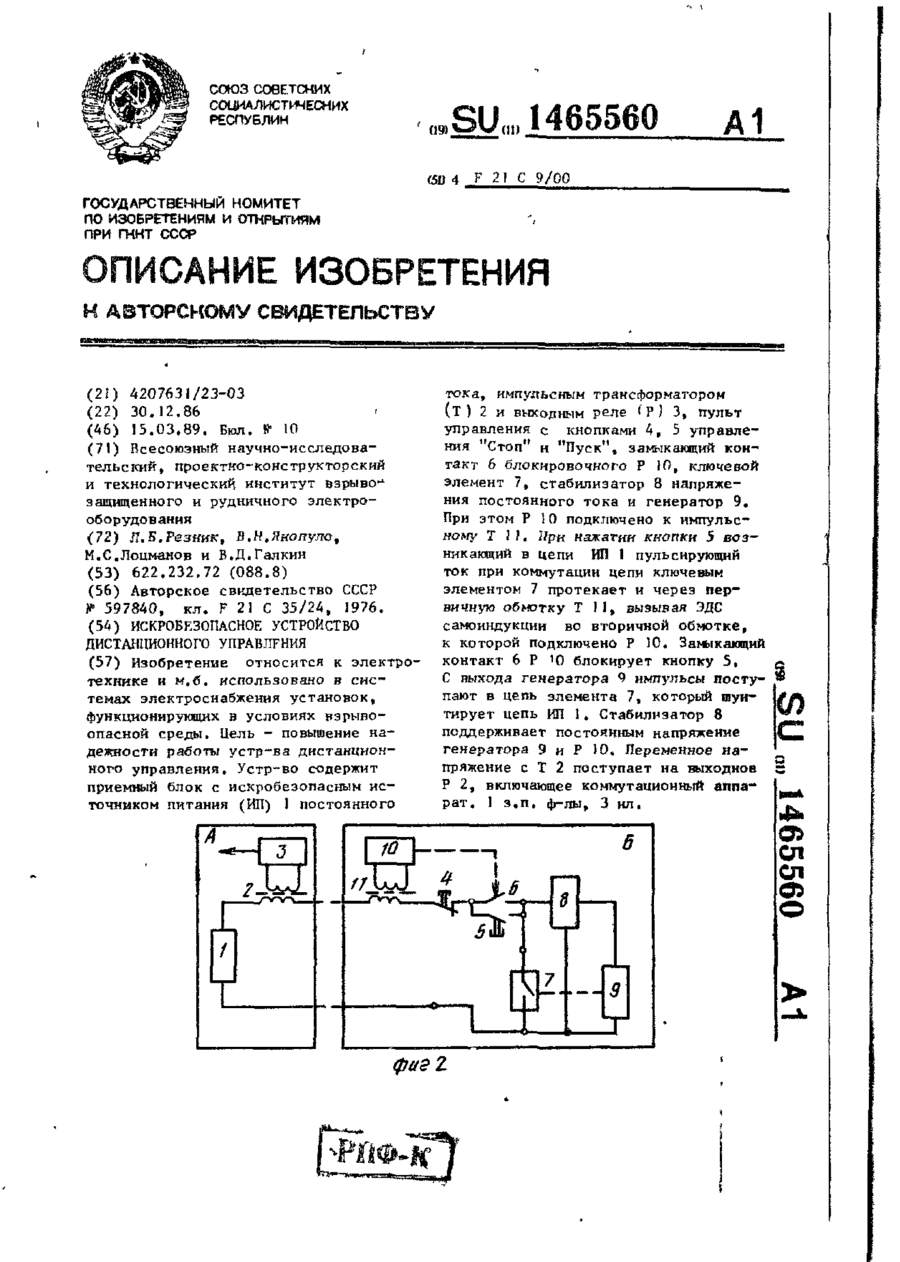
І» Искробезопасное устройство дистанционного управления, содержащее искробезопасный источник питания и исполнительное реле, расположенные в приемном блоке, соединенном двухпроводной линией связи с пультом управления, состоящим из генератора и последовательно соединенных кнопок "Пуск" и "Стоп", отличающееся тем, что, с целью повышения надежности работы, оно снабжено импульсным трансформатором, стабилизатором...
Попередній патент: Пристрій для футерування глуходонного конвертера
Наступний патент: Зносостійка полімерна композиція
Випадковий патент: Роторна машина патрила