Пристрій для визначення радіальної швидкості цілі
Номер патенту: 37869
Опубліковано: 15.09.2003
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мирошниченко Михайло Іванович, Падалко Віктор Григорович, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Мокеєв Юрій Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Каспирович Олександр Геннадійович, Немчин Олександр Федорович


Формула / Реферат
Пристрій для визначення радіальної швидкості цілі, який містить гребінку з q доплерівських фільтрів, схему АБО, який відрізняється тим, що містить q порогових схем, блок вибору номера фільтра з інформаційним виходом та допоміжним виходом максимальної амплітуди, основний та допоміжний комутатори, суматор, віднімач, m блоків множення на постійний коефіцієнт, m основних схем порівняння, m допоміжних схем порівняння, дешифратор коду фазового дискрету, регістр затримки бінарної інформації, регістр затримки коду номера фільтра, дешифратор радіальної швидкості, блок вибору максимального рівня сигналу, блок пам’яті, блок стробування, причому виходи доплерівських фільтрів з’єднані з відповідними входами блока вибору номера фільтра, основного та допоміжного комутаторів та з першими входами порогових схем, з можливістю надходження на об‘єднані другі входи порогових схем порогового сигналу виявлення сигналів цілей, а виходи порогових схем з‘єднані зi входами схеми АБО, інформаційний вихід блока вибору номера фільтра з‘єднаний з входами суматора, віднімача та інформаційним входом дешифратора коду фазового дискрету, а допоміжний вихід максимальної амплітуди блока вибору номера фільтра з'єднаний з об'єднаними входами блоків множення на постійний коефіцієнт, вихід суматора з’єднаний з керуючим входом основного комутатора, вихід якого з’єднаний з об'єднаними другими входами основних схем порівняння вихід віднімача з’єднаний з керуючим входом допоміжного комутатора, вихід якого з’єднаний з об'єднаними другими входами допоміжних схем порівняння, перші входи основних та допоміжних схем порівняння з‘єднані з виходами відповідних блоків множення на постійний коефіцієнт, виходи основних та допоміжних схем порівняння з'єднані з відповідними бінарними входами дешифратора коду фазового дискрету, вихід дешифратора коду фазового дискрету з‘єднаний зі входом регістра затримки коду номера фільтра та першим інформаційним входом дешифратора радіальної швидкості, вихід схеми АБО з'єднаний зі входом регістра затримки бінарної інформації та першим бінарним входом дешифратора радіальної швидкості, виходи регістра затримки коду номера фільтра з’єднані з відповідними інформаційними входами дешифратора радіальної швидкості, а виходи регістра затримки бінарної інформації з’єднані з відповідними бінарними входами дешифратора радіальної швидкості, вхід блока вибору максимального рівня сигналу з’єднаний з допоміжним виходом максимальної амплітуди блока вибору номера фільтра, вхід блока пам'яті з’єднаний з виходом дешифратора радіальної швидкості, інформаційні входи блока стробування з'єднані з відповідними виходами блока пам'яті, стробуючий вхід з’єднаний з виходом блока вибору максимального рівня сигналу, а вихід є виходом пристрою.
Текст
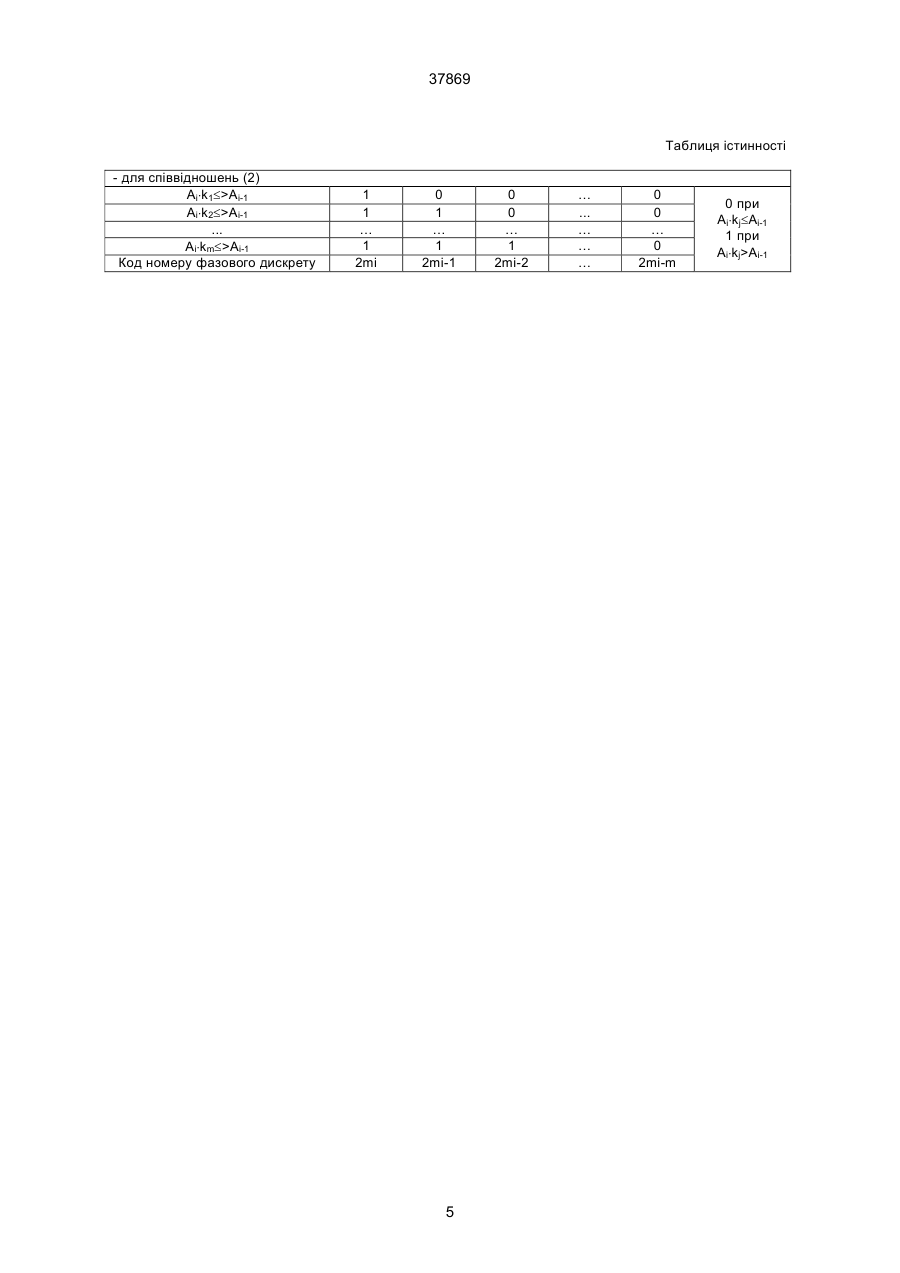
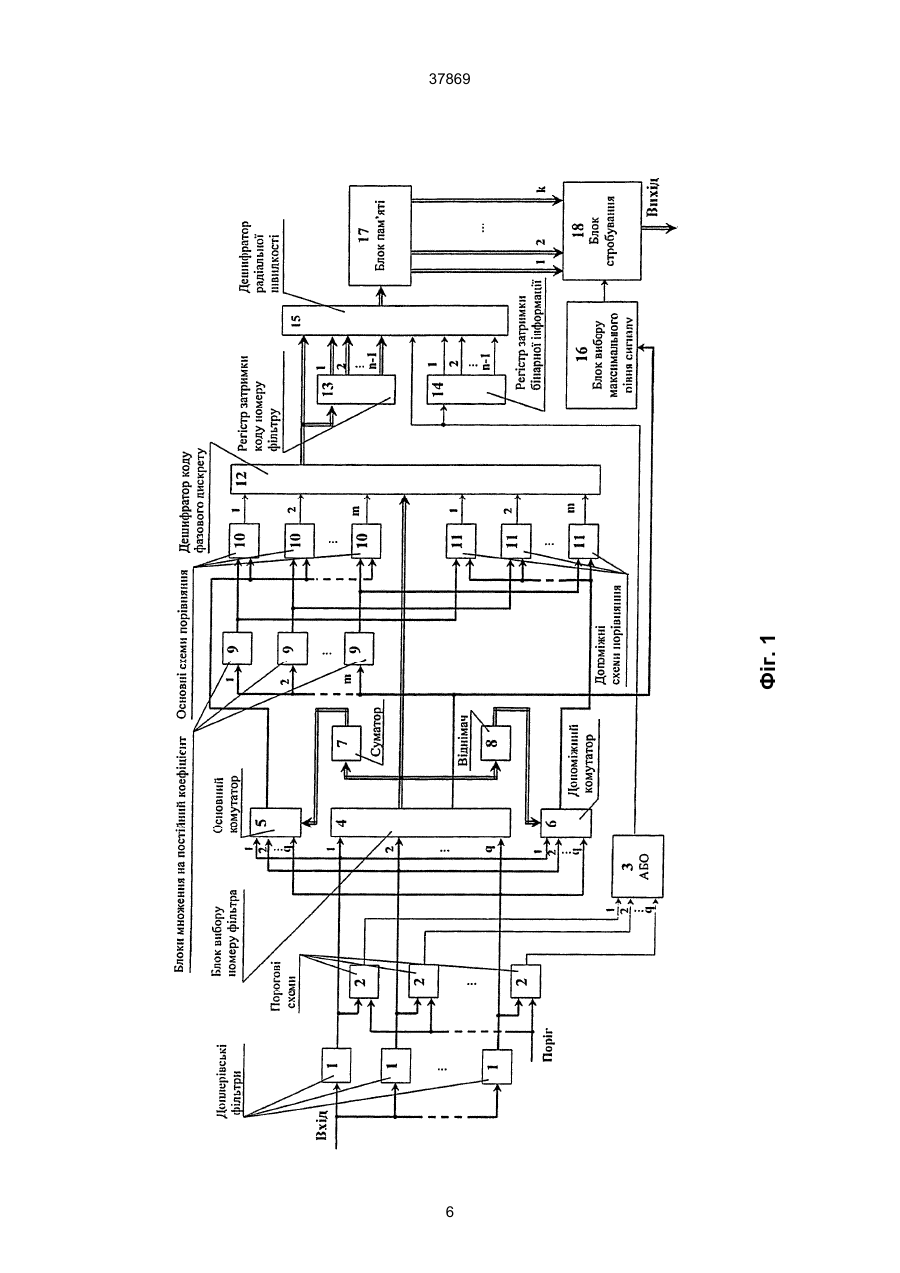
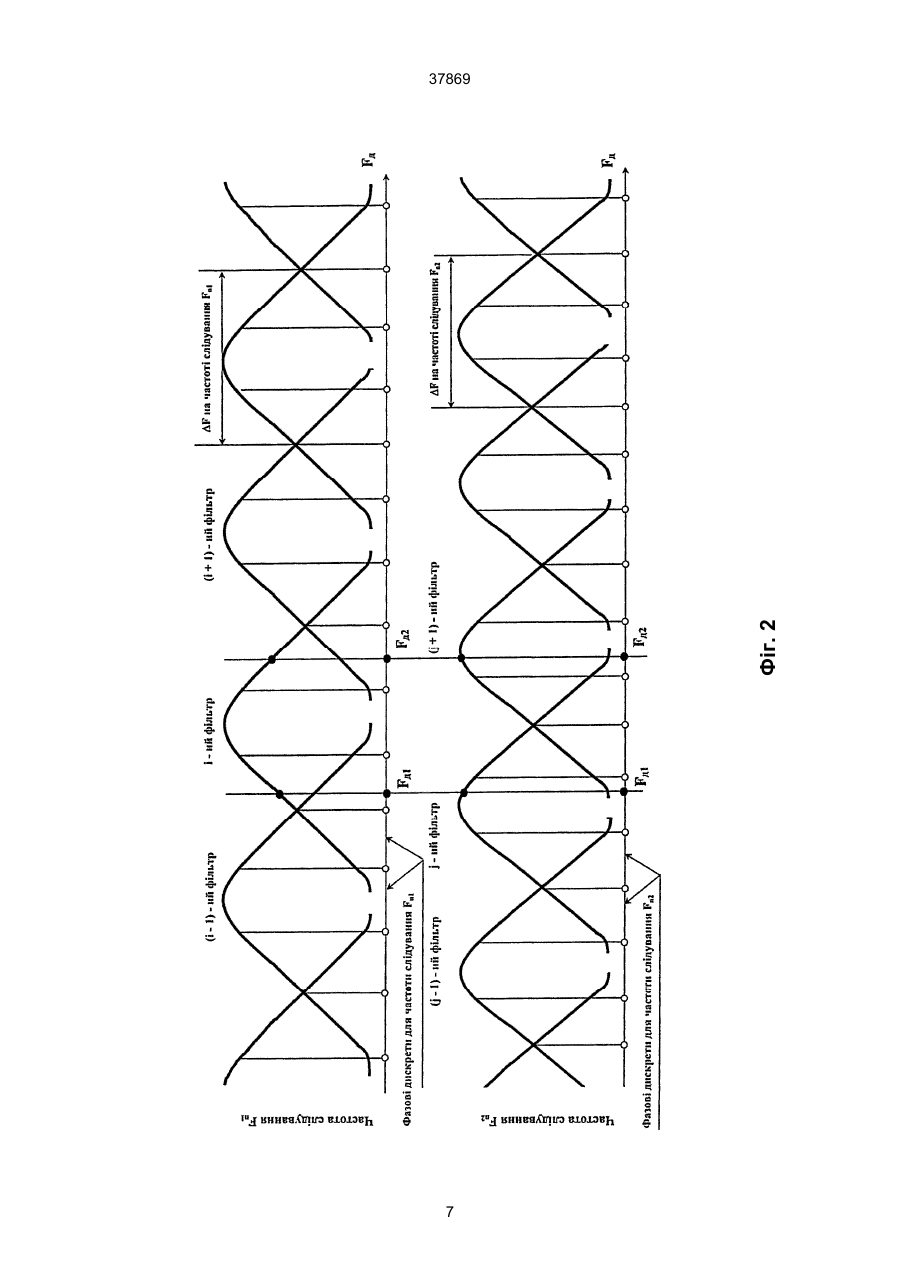
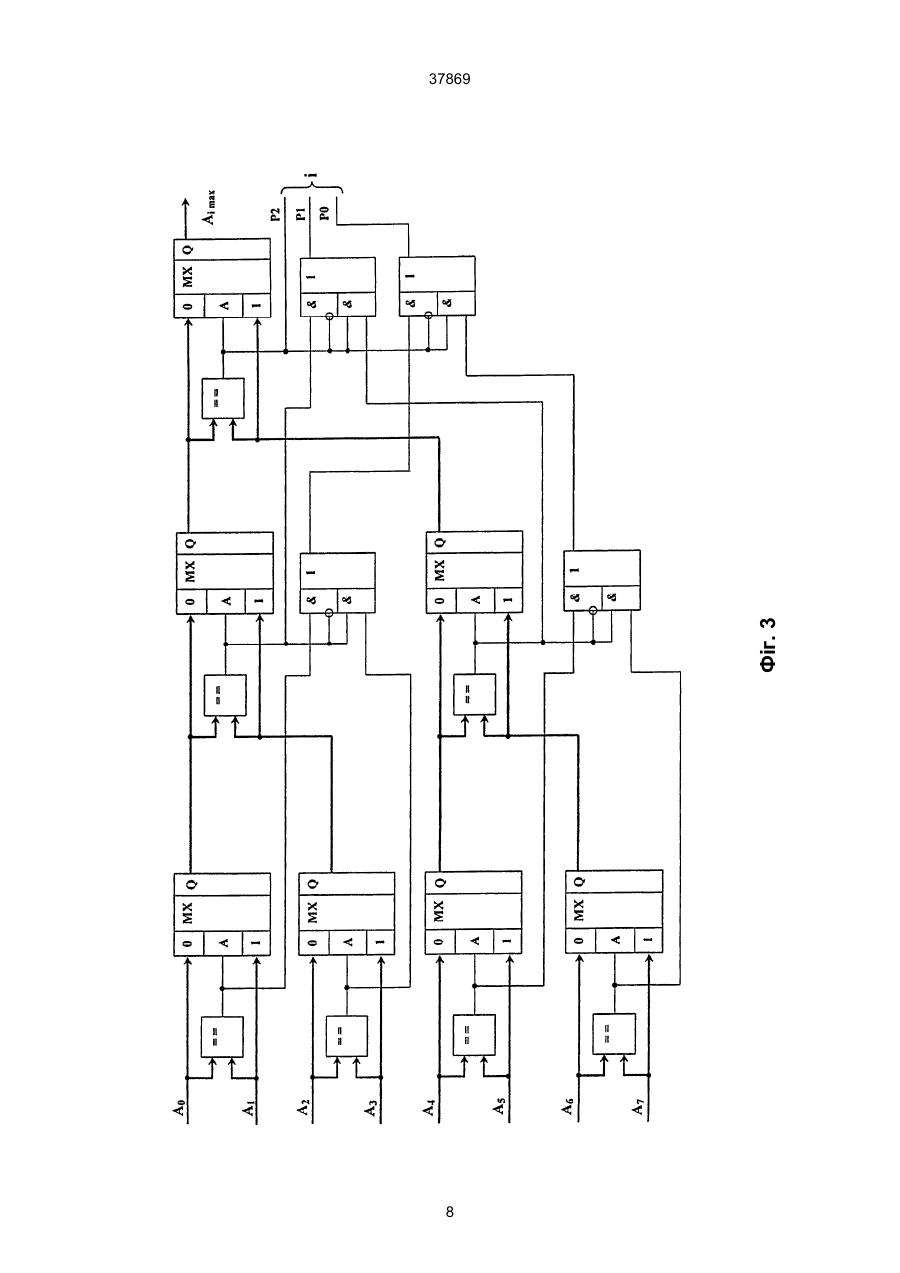
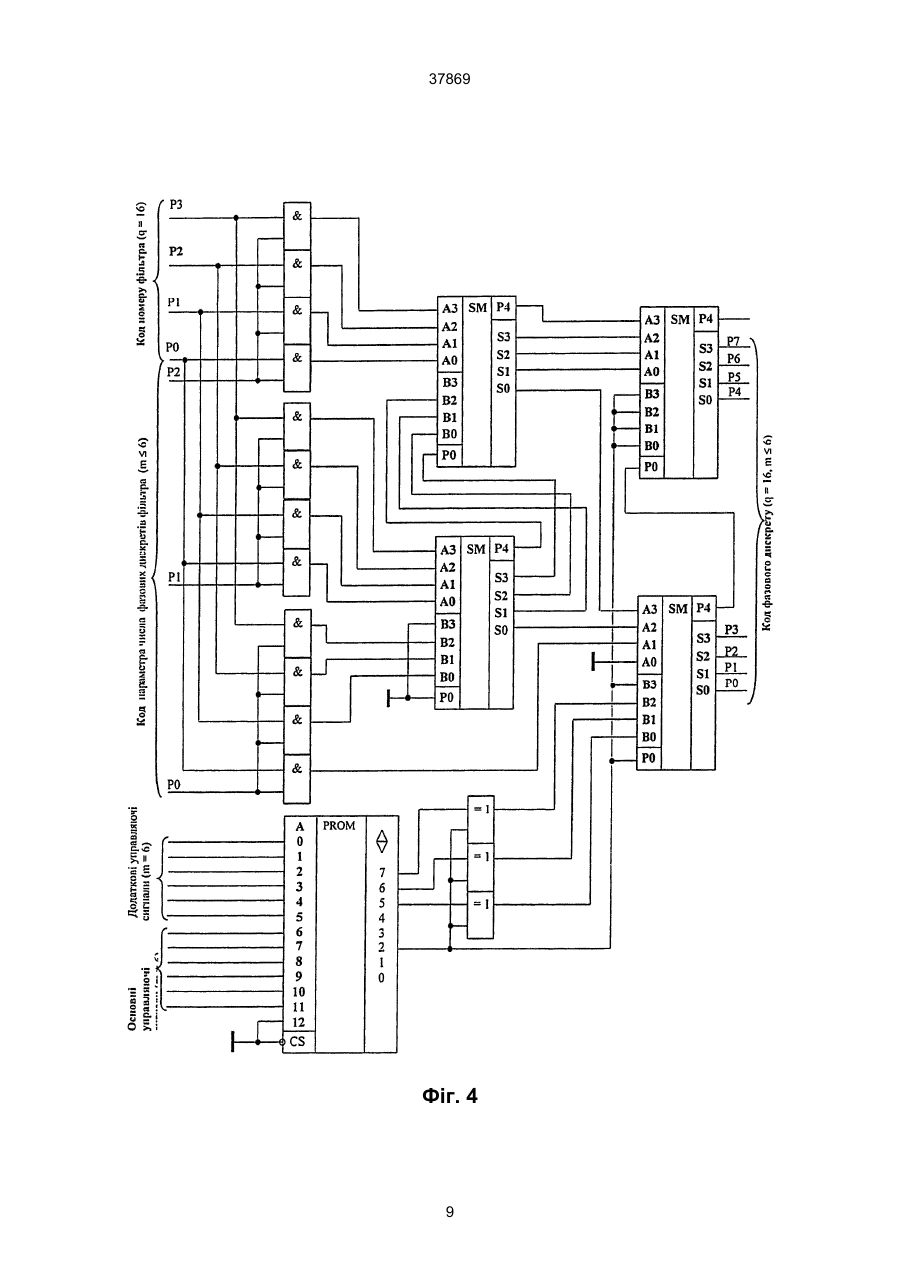
Пристрій для визначення радіальної швидкості цілі, який містить гребінку з q допплерівських фільтрів, порогову схему, схему АБО та регістр затримки, який відрізняється тим, що він містить q порогових схем, блок вибору номеру фільтра з інформаційним виходом та допоміжним виходом максимальної амплітуди, основний та допоміжний комутатори, суматор, віднімач, m блоків множення на постійний коефіцієнт, m основних схем порівняння, m допоміжних схем порівняння, дешифратор коду фазового дискрету, регістр затримки бінарної інформації, регістр затримки коду номеру фільтра, дешифратор радіальної швидкості, причому виходи допплерівських фільтрів підключені до відповідних входів блоку вибору номеру фільтра, основного та допоміжного комутаторів та до перших входів порогових схем, з можливістю надходження на об'єднані другі входи яких порогового сигналу виявлення сигналів цілей, а виходи з'єднані зі входами схеми АБО, інформаційний вихід блоку вибору номеру фільтра з'єднаний з входами суматора, віднімача та інформаційним входом дешифратора фазового дискрету, а допоміжний A (54) ПРИСТРІЙ ДЛЯ ВИЗНАЧЕННЯ РАДІАЛЬНОЇ ШВИДКОСТІ ЦІЛІ 37869 діапазон допплерівських частот цілей, що мають бути визначені цією РЛС. В РЛС з низькими частотами слідування зондуючих імпульсів ним не забезпечується однозначне визначення радіальної швидкості цілі. Найбільш близьким за суттю до пристрою, що заявляється, є пристрій для визначення радіальної швидкості цілі, що являє собою багатоканальний фільтр допплерівських частот у складі багатоканальної радіолокаційної станції (опублікована заявка РФ № 94 032 128, кл. G01S 7/40, 1996), який містить q допплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає допплерівський фільтр, вхід якого є входом допплерівського фільтрового каналу, лінію затримки з відводами, пристрій усереднення, схему порівняння, порогову схему, регістр затримки та вентильну схему, вихід якої є виходом допплерівського фільтрового каналу, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою. Недоліком такого пристрою є те, що на вихід пристрою інформація видається незалежно від того, задовольняє чи ні співвідношення сигнал/завада вимогам вимірювань з потрібною точністю, внаслідок чого визначення радіальної швидкості цілі при малих співвідношеннях сигнал/завада відбувається з великою похибкою. В основу винаходу поставлено задачу підвищення точності визначення радіальної швидкості цілі при малих відношеннях сигнал/завада. Зазначена задача досягається тим, що в пристрої для визначення радіальної швидкості цілі, який містить: гребінку з q допплерівських фільтрів, порогову схему, схему АБО та регістр затримки, згідно з винаходом, він містить q порогових схем, блок вибору номеру фільтра з інформаційним виходом та допоміжним виходом максимальної амплітуди, основний та допоміжний комутатори, суматор, віднімач, m блоків множення на постійний коефіцієнт, m основних схем порівняння, m допоміжних схем порівняння, дешифратор коду фазового дискрету, регістр затримки бінарної інформації, регістр затримки коду номеру фільтра, дешифратор радіальної швидкості, причому виходи допплерівських фільтрів підключені до відповідних входів блоку вибору номеру фільтра, основного та допоміжного комутаторів та до перших входів порогових схем, на об'єднані другі входи яких поступає пороговий сигнал виявлення сигналів цілей, а виходи з'єднані зі входами схеми АБО, інформаційний вихід блоку вибору номеру фільтра з'єднаний з входами суматора, віднімача та інформаційним входом дешифратора фазового дискрету, а допоміжний вихід максимальної амплітуди блоку вибору номеру фільтра з'єднаний з об'єднаними входами блоків множення на постійний коефіцієнт, вихід суматора підключений до управляючого входу основного комутатора, вихід якого підключений до об'єднаних других входів основних схем порівняння, вихід віднімача підключений до управляючого входу допоміжного комутатора, вихід якого підключений до об'єднаних других входів допоміжних схем порівняння, перші входи основних та допоміжних схем порівняння з'єднані з виходами відповідних блоків множення на постійний коефіцієнт, виходи основних та допоміжних схем порівняння з'єднані з відповідними бінарними входами дешифратора фазового дискрету, вихід дешифратора фазового дискрету з'єднаний зі входом регістра затримки коду номеру фільтра та першим інформаційним входом дешифратора радіальної швидкості, вихід схеми АБО з'єднаний зі входом регістра затримки бінарної інформації та першим бінарним входом дешифратора радіальної швидкості, виходи регістра затримки коду номеру фільтра підключені до відповідних інформаційних входів дешифратора радіальної швидкості, а виходи регістра затримки бінарної інформації підключені до відповідних бінарних входів дешифратора радіальної швидкості. Крім того, він містить блок вибору максимального рівня сигналу, вхід якого підключений до допоміжного виходу максимальної амплітуди блоку вибору номеру фільтру, блок пам'яті, вхід якого підключений до виходу дешифратора радіальної швидкості, багатовходовий блок стробування, інформаційні входи якого з'єднані з відповідними виходами блоку пам'яті, стробуючий вхід підключений до виходу блоку вибору максимального рівня сигналу, а вихід є виходом пристрою. На фігурі 1 зображено структурну схему пристрою, що пропонується, на фігурі 2 зображено амплітудно-частотні характеристики гребінки фільтрів пристрою для різних частот слідування зондуючих сигналів для пояснення принципу ділення смуги пропускання фільтру на m фазових дискретів, на фігурі 3 зображено функціональну схему одного з варіантів блоку вибору номеру фільтра, на фігурі 4 зображено функціональну схему одного з варіантів дешифратора коду фазового дискрету. Пристрій для визначення радіальної швидкості цілі, що пропонується, складається з гребінки q допплерівських фільтрів 1 з об'єднаними входами, що є входом пристрою, q порогових схем 2, q входової схеми АБО 3, блоку вибору номеру фільтра 4 з q входами і виходами максимального сигналу та коду номеру фільтра, в якому виявлено максимальний сигнал, основного комутатора 5 та аналогічного допоміжного комутатора 6 з q входами, управляючим входом та виходом, суматора 7, віднімача 8, m блоків множення на постійний коефіцієнт 9, m основних схем порівняння 10, m допоміжних схем порівняння 11, дешифратор коду фазового дискрету 12 з інформаційним входом, m основними та m допоміжними бітовими входами та виходом, регістр затримки коду номеру фільтра 13 зі входом та (n-1) виходом, регістр затримки бінарної інформації 14 зі входом та (n-1) виходом, дешифратор радіальної швидкості 15, що має 2n входів та вихід, блок вибору максимального рівня сигналу 16 зі входом та виходом, блок пам'яті 17 зі входом та k виходами, k-входовий блок стробування 18 з стробуючим входом, вихід якого є виходом пристрою. Виходи допплерівських фільтрів 1 під'єднані до входів відповідних схем порівняння 2, до відповідних входів блоку вибору номеру фільтра 4, основного комутатора 5 та допоміжного комутатора 6. На об'єднані другі входи схем порівняння 2 заведений пороговий сигнал, перевищення якого свідчить про наявність сигналу від цілі, а виходи схем порівняння 2 підключені до q входів схеми АБО 3, вихід якої з'єднаний зі входом регістру за 2 37869 тримки бінарної інформації 14 та першим бінарним входом дешифратора радіальної швидкості 15. Інформаційний вихід блока вибору номера фільтру 4 з'єднаний з входами суматора 7, віднімача 8 та інформаційним входом дешифратора коду фазового дискрету 12, а вихід максимального сигналу підключений до об'єднаних входів блоків множення на постійний коефіцієнт 9 та входу блоку вибору максимального рівня сигналу 16. Вихід суматора 7 підключений до управляючого входу основного комутатора 5, а вихід віднімача 8 підключений до управляючого входу допоміжного комутатора 6, вихід основного комутатора 5 підключений до об'єднаних входів m основних схем порівняння 10, вихід допоміжного комутатора 6 підключений до об'єднаних входів m допоміжних схем порівняння 11, виходи m блоків множення на постійний коефіцієнт 9 з'єднані з другими входами відповідних основних схем порівняння 10 та допоміжних схем порівняння 11. Виходи основних схем порівняння 10 з'єднані з m основними, а виходи допоміжних схем порівняння 11 з'єднані з m допоміжними бітовими входами дешифратора коду фазового дискрету 12, вихід якого підключений до входу регістра затримки коду номеру фільтра 13 та першого інформаційного входу дешифратора радіальної швидкості 15, (n-1) виходи регістра затримки коду номеру фільтра 13 підключені, відповідно, до інформаційних входів 2...n, а (n-1) виходи регістра затримки бінарної інформації 14 підключені, відповідно, до бінарних входів 2...n дешифратора радіальної швидкості 15, вихід дешифратора радіальної швидкості 15 з'єднаний з входом блока пам'яті 17, k виходів якого підключені до k входів блоку стробування 18, а стробуючий вхід блоку стробування 18 з'єднаний з виходом блоку вибору максимального рівня сигналу 16. Пристрій працює наступним чином. На об'єднані входи q допплерівських фільтрів 1 надходить сигнал з виходу приймача імпульснодопплерівської РЛС, в якій здійснюється вобуляція частоти слідування зондуючих імпульсів. Зміна частоти слідування зондуючих імпульсів відбувається через кожні q періодів зондування, а кількість частот слідування складає n. Незалежно від типу антенного пристрою РЛС (з механічним чи електронним способом сканування), від однієї цілі може бути отримана пачка з N імпульсів при k циклах вобуляції, тобто k=N/(q×n). В допплерівських фільтрах протягом q періодів зондування здійснюється розфільтровка вхідного сигналу на q допплерівських каналів в кожному дискреті дальності. Результат розфільтровки поступає на q схем порівняння 2, вихідні сигнали яких свідчать про наявність чи відсутність факту перевищення порогу виявлення в даному допплерівському каналі. Вихідні бінарні сигнали схем порівняння 2 логічно сумуються на входах схеми АБО 3 і її вихідний сигнал свідчить про наявність чи відсутність цілі в даному дискреті дальності. Увесь діапазон міжперіодного набігу фази вхідних сигналів пристрою лежить в межах (-p; +p). Смуга пропускання кожного фільтру гребінки складає таким чином величину 2p/q. Міжперіодний набіг фази сигналів, що відбиваються від рухомих об'єктів, залежить як від радіальної швидкості об' єкту, так і від періоду (частоти) слідування зондуючих імпульсів, тому сигнали, які відбиті від об'єктів, що мають сталу радіальну швидкість, при різних частотах слідування зондуючих імпульсів можуть потрапити в різні фільтри гребінки. На фіг. 2 показані характеристики фільтрів гребінки для випадку двох частот слідування. Для частоти слідування зондуючих сигналів Fn1 сигнали від двох цілей з різними допплерівськими частотам, Fд1 та Fд2 потрапили в один і той самий і-ий фільтр гребінки, в той час як для частоті слідування зондуючих сигналів Fn2 вони виявилися в різних фільтрах, а саме в j-ому та (j+1)-ому. Якщо використати n частот слідування зондуючих імпульсів, то сигналам, відбитим від об'єктів, які мають різну радіальну швидкість, відповідають різні комбінації, що складаються з n номерів фільтрів. Код номеру фільтра, який найбільш точно відповідає міжперіодному набігові фази при даній частоті слідування зондуючих імпульсів, визначається в блокові вибору номеру фільтра 4 шляхом аналізу амплітуд сигналів усіх фільтрів і вибору номера фільтра, що відповідає сигналові з максимальною амплітудою. Додатково в блокові вибору номера фільтра 4 вибирається і сам сигнал з максимальною амплітудою. На фіг. 3 представлена функціональна схема можливого варіанту побудови блока вибору номера фільтра 4 для випадку, коли q = 8. Алгоритм побудови зрозумілий з фіг. 3 і полягає в послідовному попарному порівнянні сигналів і відбору більшого з них, при цьому вихідні бінарні сигнали схем порівняння використовуються як для формування коду номера фільтра з максимальним сигналом, так і для вибору самого сигналу. Але при малому q сигнали від цілей з близькими, але різними швидкостями, можуть і не призвести до різних комбінацій номерів фільтра, тому покращення точності визначення радіальної швидкості цілі досягається за рахунок додаткового розбиття смуги пропускання допплерівських фільтрів на (2m+1) фазових дискретів. Для формування коду фазового дискрету призначені основний комутатор 5, допоміжний комутатор 6, суматор 7, віднімач 8, m блоків множення на постійний коефіцієнт 9, m основних схем порівняння 10, m допоміжних схем порівняння 11, дешифратор коду фазового дискрету 12. Принцип формування фазових дискретів, оснований на ідентичності характеристик фільтрів гребінки та на аналізі співвідношення амплітуд сигналів в і-ому фільтрі гребінки (з максимальною амплітудою сигналу) і в сусідніх йому (зліва - (і-1)ий та справа - (і+1)-ий). Смуга пропускання допплерівського фільтра розбивається на m фазових дискретів зліва від центрального фазового дискрету і на m фазових дискретів справа від центрального фазового дискрету, всього на (2m+1) фазовий дискрет. Аналіз проводиться за співвідношеннями: Аі×k1£>Аі+1; Аi×k2£>Аі+1; … Аі×km£>Аі+1; 3 (1) Ai×k1£>Ai-1; Аi×k2£>Аі-1; … Аі×km£>Аi-1; (2) 37869 вуючого пристрою (ПЗП), наприклад, 556РТ17, з алгоритмом прошиття, що відповідає таблицям істинності, виробляє код поправки (в нашому випадку трьохбітовий) та допоміжний сигнал для формування від'ємної поправки. На вихідних суматорах до добутку 2×m×і або додається код поправки (для співвідношень (1), або від вказаного добутку віднімається код поправки (для співвідношень (2), або поправка дорівнює нулеві, що відповідає кодові центрального фазового дискрету. В кожному дискреті дальності на вхід регістру затримки коду номеру фільтра 13 та на перший інформаційний вхід дешифратора радіальної швидкості 15 надходить код фазового дискрету, а на вхід регістра затримки бінарної інформації і на перший бінарний вхід дешифратора радіальної швидкості 15 надходить бінарна інформація з виходу логічної схеми АБО 3 про наявність в даному дискреті дальності сигналів від цілей. В цих регістрах інформація затримується на проміжок часу, що дорівнює q×(n-1) періодів відповідної частоти слідування зондуючих сигналів. Інформація з (n-1) виходів регістра затримки коду номеру фільтра 13 надходить на 2...n інформаційні входи дешифратора радіальної швидкості 15, відповідно, бінарна інформація з (n-1) виходів регістра затримки бінарної інформації 14 надходить на 2...n бінарні входи дешифратора радіальної швидкості 15. В дешифраторі радіальної швидкості 15 аналізується вся бінарна інформація і, у випадку прийняття рішення про наявність пачки сигналів, що відбиті об'єктом, який рухається, визначається код радіальної швидкості шляхом аналізу комбінацій з n кодів фазового дискрету. Отримана інформація затримується в блокові пам'яті 17 на час, необхідний для визначення в блокові вибору максимального рівня сигналу 16 яке з вимірювань виконувалось при максимальній амплітуді сигналу в межах даної пачки. Побудова блоку вибору максимального рівня сигналу аналогічна побудові блоку вибору номеру фільтра і відрізняється наявністю на вході лінії затримки. подібної блокові пам'яті, так як аналіз необхідно проводити за відрізок часу обробки пачки сигналів з N імпульсів. Вироблений блоком вибору максимального рівня сигналу управляючий сигнал за допомогою блоку стробування дозволить видачу на подальшу обробку тільки результату вимірювання, проведеного при максимальному співвідношенні сигнал/завада. де k1...km - постійні коефіцієнти, величина яких обирається зі співвідношень Аі×k1=Аі+1; ...Аі×km =Аі+1; Ai×k1=Ai-1; ... Аі×km =Аi-1 і залежать від характеристики допплерівських фільтрів та кількості фазових дискретів. За співвідношеннями (1) формуються основні управляючі сигнали, а за співвідношеннями (2) формуються допоміжні управляючі сигнали для дешифратора коду фазового дискрету 12. Формування коду фазового дискрету відбувається за наступними таблицями істинності. Формування коду фазового дискрету відбувається наступним чином. Код номеру фільтра і з інформаційного виходу блоку вибору номеру фільтра 4 надходить на входи суматора 7, віднімача 8 та дешифратору коду фазового дискрету 12. В суматорі 7 та віднімачеві 8 з кодом номеру фільтра і виконуються операції, відповідно, додавання та віднімання одиниці, тому на управляючому вході основного комутатора 5 присутній код (і+1) і на вихід його надійде сигнал з амплітудою Аі+1 сусіднього справа допплерівського каналу, на управляючому вході допоміжного комутатора 6 присутній код (і-1) і на вихід його надійде сигнал з амплітудою Аі-1 сусіднього зліва допплерівського каналу. Коди амплітуд Аі+1 та Аі-1 надходять відповідно на об'єднані перші входи m основних схем порівняння 10 та m допоміжних схем порівняння 11. Код максимальної амплітуди Аі з допоміжного виходу блоку вибору номеру фільтра 4 є вхідним сигналом для m блоків множення на постійний коефіцієнт 9, де на першому основному блокові 9 відбувається множення на коефіцієнт k1, на другому блокові - на k2, на останньому m-ому блокові - на km. З виходів блоків множення на постійний коефіцієнт 9 коди добутків Аі×k1, Аi×k2, ... Аi×km поступають на другі входи основних схем порівняння 10 та допоміжних схем порівняння 11. В результаті аналізу бінарних сигналів на виходах основних схем порівняння 10 відбувається формування коду фазового дискрету в діапазоні міжперіодних фазових набігів від центральної точки і-го фільтру до точки перетину характеристик і-го та (і+1)-го фільтрів, а в результаті аналізу бінарних сигналів на виходах допоміжних схем порівняння 11 відбувається формування коду фазового дискрету в діапазоні міжперіодних фазових набігів від центральної точки і-го фільтру до точки перетину характеристик і-го та (і-1)-го фільтрів. На фіг. 4 представлена принципова схема одного з варіантів дешифратора фазового дискрету 12 для випадку, коли q £ 16, m = 6. За допомогою схем І (наприклад, 1533ЛИ1) та перших суматорів (наприклад, 533ИМ6) формується добуток 2×m×і, як того вимагають таблиці істинності. Функціональний перетворювач на основі постійного запам’ято Таблиця істинності - для співвідношень (1) Аі×k1£>Аі+1 Аi×k2£>Аі+1 ... Аі×km£>Аі+1 Код номеру фазового дискрету 1 1 ... 1 2mi 0 1 ... 1 2mi+1 4 0 0 ... 1 2mi+2 ... ... ... ... ... 0 0 ... 0 2mi +m 0 при Аі×kj£Аі+1 1 при Аі×kj>Аі+1 37869 Таблиця істинності - для співвідношень (2) Аі×k1£>Аі-1 Аi×k2£>Аі-1 ... Аі×km£>Аі-1 Код номеру фазового дискрету 1 1 … 1 2mi 0 1 … 1 2mi-1 5 0 0 … 1 2mi-2 … ... … … … 0 0 … 0 2mi-m 0 при Аі×kj£Аі-1 1 при Аі×kj>Аі-1 Фіг. 1 37869 6 Фіг. 2 37869 7 Фіг. 3 37869 8 37869 Фіг. 4 9 37869 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 10
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining radial velocity of a target
Автори англійськоюMyroshnychenko Mykhailo Ivanovych, Kaspyrovych Oleksandr Hennadiiovych, Kononovych Viktor Yakovych, Kopnov Mykhailo Oleksandrovych, KUKOLNITSKYI ANATOLII PYLYPOVYCH, Nemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych
Назва патенту російськоюУстройство для определения радиальной скорости цели
Автори російськоюМирошниченко Михаил Иванович, Каспирович Александр Геннадиевич, Кононович Виктор Яковлевич, Копнов Михаил Александрович, КУКОЛЬНИЦКИЙ АНАТОЛИЙ ФИЛИППОВИЧ, Немчин Александр Федорович, Мокеев Юрий Геннадьевич
МПК / Мітки
МПК: G01S 13/00, G01S 13/524, G01S 7/00
Мітки: швидкості, визначення, радіальної, пристрій, цілі
Код посилання
<a href="https://ua.patents.su/10-37869-pristrijj-dlya-viznachennya-radialno-shvidkosti-cili.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення радіальної швидкості цілі</a>
Кореляційно-фазовий вимірювач радіальної швидкості цілі
Номер патенту: 48844
Опубліковано: 15.08.2002
Автори: Карлов Володимир Дмитрович, Коваль Олександр Андрійович, Савченко Микола Павлович, Челпанов Артем Володимирович, Стахєєв Микола Олександрович, Фик Олександр Ілліч
МПК: G01S 13/52, G01S 13/00
Мітки: радіальної, швидкості, вимірювач, кореляційно-фазовий, цілі
Формула / Реферат:
Кореляційно-фазовий вимірювач радіальної швидкості цілі, який містить: блок вимірювання фази, генератор опорних функцій фази, розв'язуючий блок, який відрізняється тим, що додатково введено запам'ятовуючий пристрій (ЗП), блок обчислення різниці фаз, блок грубої оцінки, блок вагової обробки і блок усунення неоднозначності, причому блоки вимірювання фази, ЗП, корелятор, розв'язуючий блок, блок вагової обробки та блок усунення неоднозначності...
Радіолокаційний вимірник радіальної швидкості цілі
Номер патенту: 41531
Опубліковано: 17.09.2001
Автор: Порошин Сергій Михайлович
МПК: G01S 11/00
Мітки: швидкості, радіальної, вимірник, цілі, радіолокаційний
Формула / Реферат:
Радіолокаційний вимірник радіальної швидкості цілі, що містить приймально-передаючу антену, передавач у вигляді генератора високої частоти f0 приймач з амплітудним детектором, підсилювач частот Допплера та індикатор, який відрізняється тим, що до складу передавача додатково включений генератор високої частоти f0+Df, що періодично перестроюється, девіація частоти якого Df має величину у межах від 0 до подвоєного значення максимально можливої...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Гегечкорі Сергій Олексійович, Невгасимий Олександр Федорович, Гладиш Фелікс Леонідович, Шермаревич Владлен Георгієвич, Кравцов Володимир Геннадєвич
МПК: G01S 13/00
Мітки: швидкості, визначення, радіолокаційний, пристрій, дальності, цілі
Формула / Реферат:
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора
Номер патенту: 17468
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: вимірювання, радіолокатора, спосіб, секвентного, швидкості, радіальної, цілі
Формула / Реферат:
Способ измерения радиальной скорости цели для секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, отличающийся тем, что выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала,...
Пристрій для вимірювання дальності та радіальної швидкості
Номер патенту: 15338
Опубліковано: 30.06.1997
Автори: Челпанов Володимир Валентинович, Самуль Юрій Володимирович
МПК: G01S 13/00
Мітки: дальності, вимірювання, швидкості, радіальної, пристрій
Формула / Реферат:
Устройство для измерения дальности и радиальной скорости, содержащее последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход -с вторым входом блока фазоизмерителей, отличающееся тем, что...