Радіолокаційний вимірник радіальної швидкості цілі


Формула / Реферат
Радіолокаційний вимірник радіальної швидкості цілі, що містить приймально-передаючу антену, передавач у вигляді генератора високої частоти f0 приймач з амплітудним детектором, підсилювач частот Допплера та індикатор, який відрізняється тим, що до складу передавача додатково включений генератор високої частоти f0+Df, що періодично перестроюється, девіація частоти якого Df має величину у межах від 0 до подвоєного значення максимально можливої допплерівської частоти 2FDM, на виході підсилювача частот Допплера додатково включений фільтр-пробка, що перестроюється на частоту Df, на виході якого встановлений фільтр, що перестроюється на частоту Df/2, зв'язаний з індикатором, індикатор виконаний у вигляді електронно-променевої трубки, горизонтальна разгортка якої пропорційна девіації частоти Df, а вертикальна разгортка пропорційна амплітуді сигналу з виходу фільтру, що перестроюється.
Текст
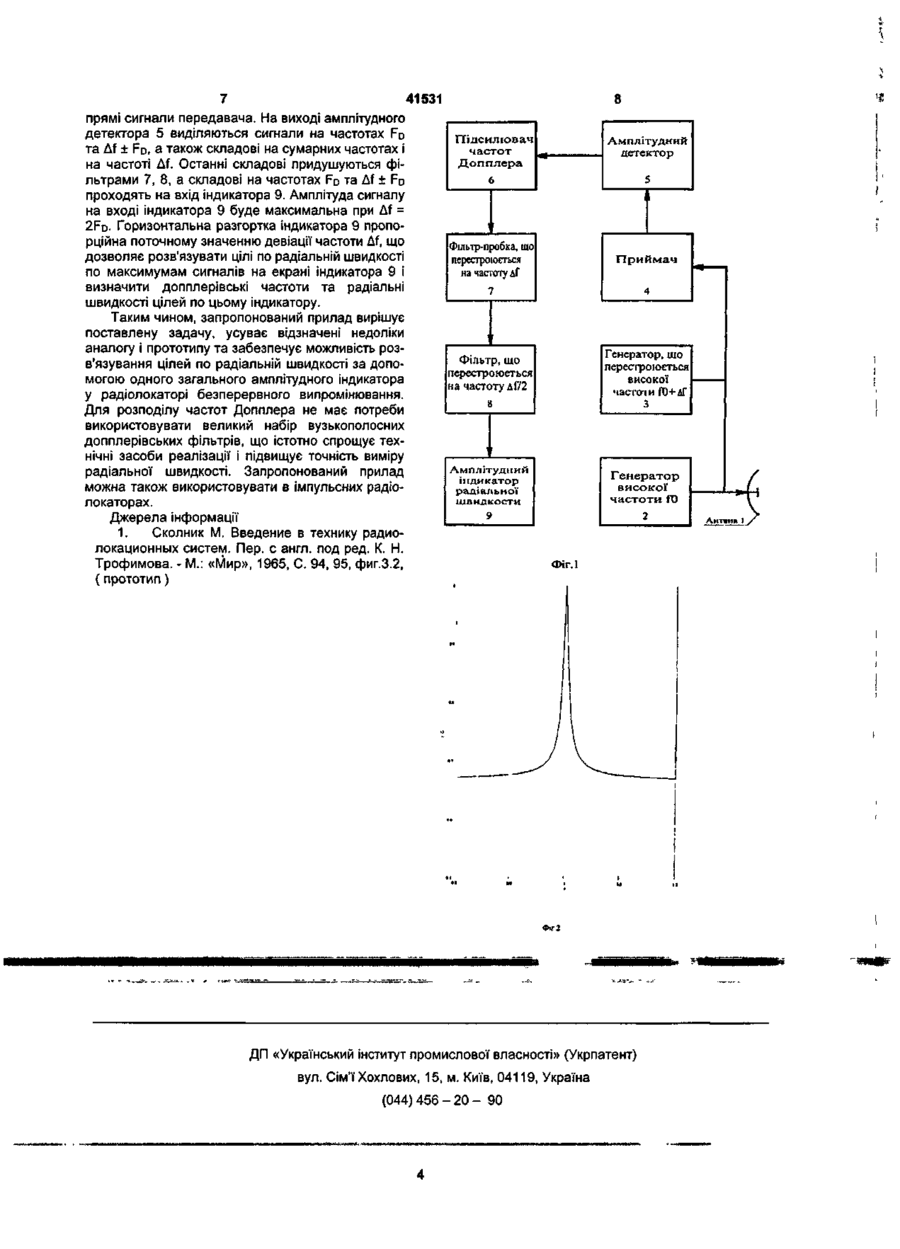
Радіолокаційний вимірник радіальної швидкості цілі, що містить приймально-передаючу антену, передавач у вигляді генератора високої частоти fo, приймач з амплітудним детектором, підсилювач частот Допплера та індикатор, який відрізняється тим, що до складу передавача додатково включений генератор високої частоти Винахід відноситься до галузі радіолокації і може бути використаний у наземних імпульсних радіолокаторах мікрохвильового діапазону або у радіолокаторах безперервного випромінювання для виміру радіальних швидкостей повітряних цілей та забезпечення розв'язання по радіальній швидкості. Відомий радіолокаційний вимірник радіальних швидкостей цілей по частоті Допплера [1], в якому для розв'язання допплерівських частот цілей використаний набір вузькополосних допплерівських фільтрів. Радіальну швидкість цілі визначають по частоті Допплера за допомогою відомого співвідношення, а частоту Допплера визначають по резонансній частоті того фільтру, на виході якого з'явиться сигнал цілі [1]. Недоліком такого аналогу є те, що для розв'язання допплерівських частот декількох цілей використовують великий набір вузькополосних допплерівських фільтрів та великий набір індикаторів на виході кожного фільтру, тобто конструкція приймальної системи радіолокатора складна і її тяжко реалізувати. Другий недолік аналогу полягає у тому, що при обмеженої (прийнятої для реалізації) кількості допплерівських фільтрів точність виміру радіальної швидкості буде низькою. Як прототип вибраний допплерівський радіолокатор безперервного випромінювання [1]. Про fo+Af, що періодично перестроюється, девіація частоти якого Af має величину у межах від 0 до подвоєного значення максимально можливої допплеровської частоти 2FDM, на виході підсилювача частот Допплера додатково включений фільтрпробка, що перестроюється на частоту Af, на виході якого встановлений фільтр, що перестроюється на частоту Af/2, зв'язаний з індикатором, індикатор виконаний у вигляді електронно-променевої трубки, горизонтальна разгортка якої пропорційна девіації частоти Af, а вертикальна разгортка пропорційна амплітуді сигналу з виходу фільтру, що перестроюється. тотип містить приймально-передаючу антену, передавач безперервних вагань високої частоти fo, приймач з амплітудним детектором, підсилювач допплерівської частоти та індикатор (наприклад, у вигляді вимірника частоти Допплера). Радіальну швидкість цілі у прототипі визначають по зміряній частоті Допплера з допомогою відомого співвідношення. Частоту Допплера цілі виділяють на виході детектора приймача, що приймає водночас як луна-сигнали рухомої цілі, так і прямий безперервний зондуючий сигнал передавача [1]. Недоліком прототипу є те, що такий радіолокатор не володіє розв'язанням по радіальній швидкості і не може водночас вимірювати радіальні швидкості декількох цілей. Інший недолік прототипу полягає в тому, що він не може вимірювати дальність цілі. В основу винаходу поставлена задача вдосконалення радіолокаційного вимірника радіальної швидкості цілі, в якому за рахунок включення до складу приладу генератора високої частоти, що періодично перестроюється із девіацією частоти Af, фільтру-пробки, що перестроюється на частоту Af та фільтру, що перестроюється на частоту Af/2, забезпечується розв'язання цілей по радіальній швидкості на загальному амплітудному індикаторі, розгортка якого пропорційна девіації частоти Af. Поставлена задача вирішується тим, що у радіолокаційному вимірникові радіальної швидкості CO ю 41531 цілі, що містить приймально-передаючу антену, передавач у вигляді генератора високої частоти fo, приймач з амплітудним детектором, підсилювач частот Допплера та індикатор, згідно винаходу у склад передавача додатково включений генератор високої частоти fo+Af, що періодично перестроюється, девіація частоти якого Af має величину у межах від 0 до подвоєного значення максимально можливої допплерівської частоти 2PDM; на виході підсилювача частот Допплера додатково включений фільтр-пробка, що перестроюється на частоту Af, на виході якого встановлений фільтр, що перестроюється на частоту Af/2, зв'язаний з індикатором; індикатор виконаний у вигляді електроннопроменевої трубки, горизонтальна розгортка якої пропорційна девіації частоти Af, а вертикальна розгортка пропорційна амплітуді сигналу з виходу фільтру ,що перестроюється. Частоти Допплера (або радіальні швидкості цілей) визначають по максимумам сигналів на амплітудному індикаторі, при цьому частота Допплера вдвічі менш значення девіації частоти Af, відповідного максимуму сигналу. Запропоноване виконання передавача та амплітудного індикатора радіолокатора, а також додаткове включення до складу приладу фільтрупробки і фільтру ,що перестроюється, забезпечують розв'язання цілей по радіальній швидкості на одному загальному індикаторі, що значно розширює можливості приладу у порівнянні з прототипом У порівнянні із зазначеним вище аналогом запропонований прилад спрощує конструкцію приймальної системи, не вимагає великої кількості допплерівських фільтрів та підвищує точність виміру радіальної швидкості цілей. Крім того, слідує відзначити, що запропонований прилад може бути використаний також в імпульсних радіолокаторах, для виміру як радіальних швидкостей, так і дальності цілей. При цьому період зміни частоти генератора передавача, що перестроюється може бути значно більше періоду проходження імпульсів/ Технічна суттєвість та принцип дії запропонованого приладу пояснюються фіг.1, 2. На фіг.1 представлена спрощена структурна схема запропонованого радіолокатора, а на фіг.2 представлений розрахунковий графік залежності амплітуди сигналу на вході індикатора від нормованого значення х = Af/2Ffl девіації частоти генератора передавача, що перестроюється. До складу запропонованого приладу на схемі фіг.1 входять такі основні елементи: приймально-передаюча антена 1; генератор високої частоти fo передавача 2; генератор, що перестроюється 3 високої частоти fo + Af передавача, девіація частоти якого Af періодично змінюється у межах від 0 до подвоєної максимально можливої допплерівської частоти сигналу цілі 2PDM; приймач 4 (наприклад, приймач прямого підсилення); амплітудний детектор приймача 5; підсилювач частот Допплера 6; фільтр-пробка, що перестроюється 7? частота придушення якого рівна девіації частоти Af пере давача і перестроюється у відповідності з поточним значенням цієї девіації; фільтр, що перестроюється 8, резонансна частота якого рівна Af/2 і перестроюється у відповідності з поточним значенням девіації частоти передавача; амплітудний індикатор радіальної швидкості 9 у вигляді електронно-променевої трубки, горизонтальна розгортка якої пропорційна девіації частоти Af передавача. Принцип дії запропонованого приладу пояснюється наступним. Передавач радіолокатора виконаний з двочастотним сигналом із двох генераторів: генератора високої частоти fo і генератора високої частоти fo + Af, що періодично перестроюється девіація частоти якого Af плавно змінюється у межах від 0 до 2PDM, тобто у порівняно невеликих межах. Приймач радіолокатора водночас приймає як луна-сигнали цілей, так і дві несучих частоти передавача fo та fo + Af. На виході амплітудного детектора приймача будуть виділені допплеровскі частоти, рівні різницям частот лунасигналів цілей і зондуючих сигналів передавача. Фільтр-пробка 7 не пропускає на вихід різиичну частоту Af зондуючих сигналів передавача, а фільтр, що перестроюється виділяє сигнал на частоті Af/2. Розрахунки показали, що сигнал від відповідної цілі на вході фільтру, що перестроюється 8 буде максимальний, коли девіація частоти Af передавача буде вдвічі більше допплеровськой частоти FD ЦІЄЇ ЦІЛІ, тобто за умови Af=2FD, (1) де Af - поточне значення девіації частоти передавача; FD - допплерівська частота відповідної цілі. Це забезпечує розв'язання цілей по радіальній швидкості і дозволяє визначити допплерівські частоти (і радіальні швидкості) цілей по максимумам сигналів на екрані загального амплітудного індикатора, горизонтальна розгортка якого пропорційна значенню поточної девіації частоти Af передавача. Для обґрунтування можливості практичної реалізації запропонованого технічного рішення та його істотних відмінних признаків нижче приводяться необхідні математичні співвідношення. При цьому для спрощення аналіз проводиться для однієї з цілей і наближено вважається, що амплітудний детектор приймача має приблизно квадратичну вольт-амперну характеристику. Приймач прямого підсилення 4 водночас приймає лунусигнали цілей та зондуючи сигнали передавача на двох близьких частотах, напруга сигналу на виході амплітудного детектора 5 буде ь-Uclcos[2*(/,-*-o)f + e,]+ Ucl соряWt-&/-FD)t-np}} }2, (2) де Uo - напруга на виході амплітудного детектора приймача; а - коефіцієнт вольт-амперної характеристики детектора; RH - опір навантаження амплітудного детектора; Um,Un2 - амплітуди напруг сигналів передавача на виході приймача; Фофі - початкові фази сигналів передавача на виході приймача; 41531 fo- несуча частота генератора передавача; приведена у літературі [1]. Амплітудний детектор 5 Af - поточне значення девіації частоти генерамає приблизно квадратичну вольт-амперну характора передавача, що перестроюється; теристику. Генератор 3 високої частоти fo + Af, що t - час; перестроюється може бути виконаний, наприклад, Uci,UC2 - амплітуди напруг луна-сигналів цілі на у вигляді відомого генератора, що управляється першій та другій частотах передавача; напругою. Управляюча напруга цього генератора має пилообразну форму з порівняно великим пеФгфз - початкові фази луна-сигналів цілі на виріодом повторення пили. Межі зміни девіації часході приймача; тоти Af генератора 3 порівняно малі і знаходяться FD - частота Допплера сигналу цілі. в інтервалі від 0 до FDM. Фільтр-пробка 7, що переЗ виразу (2) видно, що напруга на виході ампстроюється на частоту подавления Af може бути літудного детектора містить складові на сумарних виконано у вигляді аналогового фільтру з конденчастотах, постійну складову, складову на частоті саторами, ємність яких змінюється електричне за Af, складову на частотах Af + FD та Af - FD І складопомогою пилообразно!" управляючої напруги дову на частоті Допплера FD. Постійна складова та генератора 3 передавача. Можливо також викоскладова на частоті Af будуть подавлені фільтромнання цього фільтру у вигляді цифрового фільтру, пробкою 7. Фільтри 7, 8 подавлять також складову що управляється. Фільтр, що перестроюється 8 на на сумарних частотах. Тому для напруги на вході частоту Af/2 також перестроюється управляючою індикатора 9 можна приблизно записати наступне пилообразною напругою генератора 3 передавача вираження і також може бути виконаний або в аналоговій, або у цифровій формі. Амплітудний індикатор радіаль)l+
ДивитисяДодаткова інформація
Автори англійськоюPoroshyn Serhiy Mykhailovych
Автори російськоюПорошин Сергей Михайлович
МПК / Мітки
МПК: G01S 11/00
Мітки: цілі, радіальної, швидкості, вимірник, радіолокаційний
Код посилання
<a href="https://ua.patents.su/4-41531-radiolokacijjnijj-vimirnik-radialno-shvidkosti-cili.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний вимірник радіальної швидкості цілі</a>
Радіолокаційний вимірювач радіальної швидкості
Номер патенту: 40131
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/02
Мітки: швидкості, вимірювач, радіолокаційний, радіальної
Формула / Реферат:
Радіолокаційний вимірювач радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач і вимірювач частоти Доплера, який відрізняється тим, що передавач виконаний у виді генератора проміжної частоти fпp і двох помножителей цієї частоти на ціле число N і N+2 відповідно, виходи яких пов'язані з антеною, що передає, до складу приймача додатково включений помножитель проміжної частоти fпp...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Гладиш Фелікс Леонідович, Гегечкорі Сергій Олексійович, Кравцов Володимир Геннадєвич, Невгасимий Олександр Федорович, Шермаревич Владлен Георгієвич
МПК: G01S 13/00
Мітки: дальності, цілі, пристрій, швидкості, радіолокаційний, визначення
Формула / Реферат:
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора
Номер патенту: 17468
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: швидкості, радіальної, цілі, спосіб, радіолокатора, секвентного, вимірювання
Формула / Реферат:
Способ измерения радиальной скорости цели для секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, отличающийся тем, что выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала,...
Вимірювач радіальної швидкості для радіолокатора наведення безупинного випромінювання
Номер патенту: 40136
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/02
Мітки: радіолокатора, вимірювач, швидкості, випромінювання, наведення, радіальної, безупинного
Формула / Реферат:
Вимірювач радіальної швидкості для радіолокатора наведення безупинного випромінювання, що містить передавач безупинного сигналу з дзеркальною антеною, що передає, приймач із приймальнею антеною, амплітудним детектором і фільтром низьких частот і вимірювач частоти Доплера, що відрізняється тим, що приймальна антена виконана у вигляді круглої кільцевої щілини на параболічному дзеркалі антени, що передає, і пов'язана коаксіальним...
Радіолокаційний далекомір безупинного випромінювання
Номер патенту: 40132
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/02
Мітки: безупинного, випромінювання, далекомір, радіолокаційний
Формула / Реферат:
Радіолокаційний далекомір безупинного випромінювання, що містить антену, що передає, передавач із генератора безупинного сигналу високої частоти, генератора сигналу, що модулює, і амплітудного модулятора, приймальну антену, приймач і фазовимірювач, що відрізняється тим, що генератор сигналу передавача, що модулює, виконаній у виді двох генераторів синусоїдальних сигналів двох низьких частот, що модулюють, F1 і F2 на виході амплітудного...
Попередній патент: Спектрофотометр
Наступний патент: Радіолокаційний вимірник кутових координат
Випадковий патент: 1-n-хлорбензил-8-(піридиніл-3') метиліденгідразинотеобромін, який виявляє антиоксидантну дію