Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 40138
Опубліковано: 25.03.2009
Автори: Авдєєнко Гліб Леонідович, Якорнов Євгеній Аркадійович, Мазуренко Олександр Вікторович, Ільченко Михайло Юхимович, Веселова Анастасія Петрівна

Формула / Реферат
Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радіомодема, перший і другий входи якого є входами сигналів, що надходять від рухомих об'єктів через лінії зв'язку, і пристрою обробки, вхід якого є виходом радіомодема, індикатора, вхід якого є першим виходом пристрою обробки, і блока керування, вхід якого є другим виходом пристрою обробки, а вихід з'єднаний з третім входом радіомодема, перший супроводжуваний рухомий об'єкт, з радіомодемом, другий вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS- приймачем, вихід якого є першим входом радіомодема, а вхід приймача є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи радіонавигації, виконавчим пристроєм з 2-N-виходами, вхід якого є виходом радіомодема, і радіомаяком, вхід якого є першим виходом виконавчого пристрою, другий супроводжуючий рухомий об'єкт, що супроводжує перший і містить каскадно з'єднані радіомодем, перший вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS-приймач, вхід якого є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи радіонавігації, а перший вихід є другим входом радіомодема, та індикатор взаємного положення обох рухомих об'єктів, перший вхід якого є виходом радіомодема, а другий вхід з'єднаний з другим виходом GPS-приймача, і виявник, перший вихід якого з'єднаний з третім входом індикатора взаємного положення, що містить лінійну антенну решітку, три підсилювачі високої частоти, два дільники потужності на два виходи, два фазометри і мікропроцесор, причому перший вихід мікропроцесора є першим виходом виявника, яка відрізняється тим, що лінійна антенна решітка виявника виконана трьохелементною і з різними базами між ними, другий вихід виявника з'єднаний з четвертим входом індикатора взаємного положення, і в виявник введені три смугопропускаючі фільтри, узгоджені за амплітудно-частотними характеристиками з сигналом радіомаяка, три триплечих комутатори, три множники частоти, три вузли дискретних прецизійних атенюаторів, три вузли дискретних прецизійних фазообертачів, чотири квадратурних дільники потужності, а два існуючих дільники потужності виконані квадратурними, три амплітудних детектори, шість амплітудно-цифрових перетворювачів, фазометр, гетеродин-калібратор, дві шини вводу цифрових даних до мікропроцесора та три шини виводу цифрових даних від мікропроцесора, причому до кожного з виходів трьох антен лінійної антенної решітки каскадно під'єднані смугопропускаючий фільтр, комутатор, підсилювач високої частоти, множник частоти, вузли дискретних прецизійних атенюаторів та фазообертачів і дільник потужності, перший вихід кожного з трьох з'єднаний з каскадно з'єднаними амплітудним детектором та амплітудно-цифровим перетворювачем, другі виходи - з входами четвертого, п'ятого і шостого дільників потужності, а у третіх виходах в усіх шести дільників потужності розміщені узгоджені навантаження; перші виходи четвертого і шостого дільників потужності з'єднані з першими входами першого і третього фазометрів, їх другі виходи - з входами другого фазометра, а виходи п'ятого дільника потужності - з другими входами першого і третього фазометрів, виходи усіх трьох фазометрів з'єднані відповідно з входами четвертого, п'ятого і шостого амплітудно-цифрових перетворювачів, дві шини вводу цифрових даних у мікропроцесор з'єднані відповідно з виходами першого, другого і третього амплітудно-цифрових перетворювачів та четвертого, п'ятого і шостого; перший вихід гетеродина-калібратора з'єднаний з другими входами комутаторів, а його другий вихід з другими входами множників частоти; перша шина виводу цифрових даних від мікропроцесора з'єднана з керуючими входами комутаторів, друга та третя шини - відповідно з вузлами дискретних прецизійних атенюаторів та фазообертачів, а другий вихід мікропроцесора є другим виходом виявника.
Текст
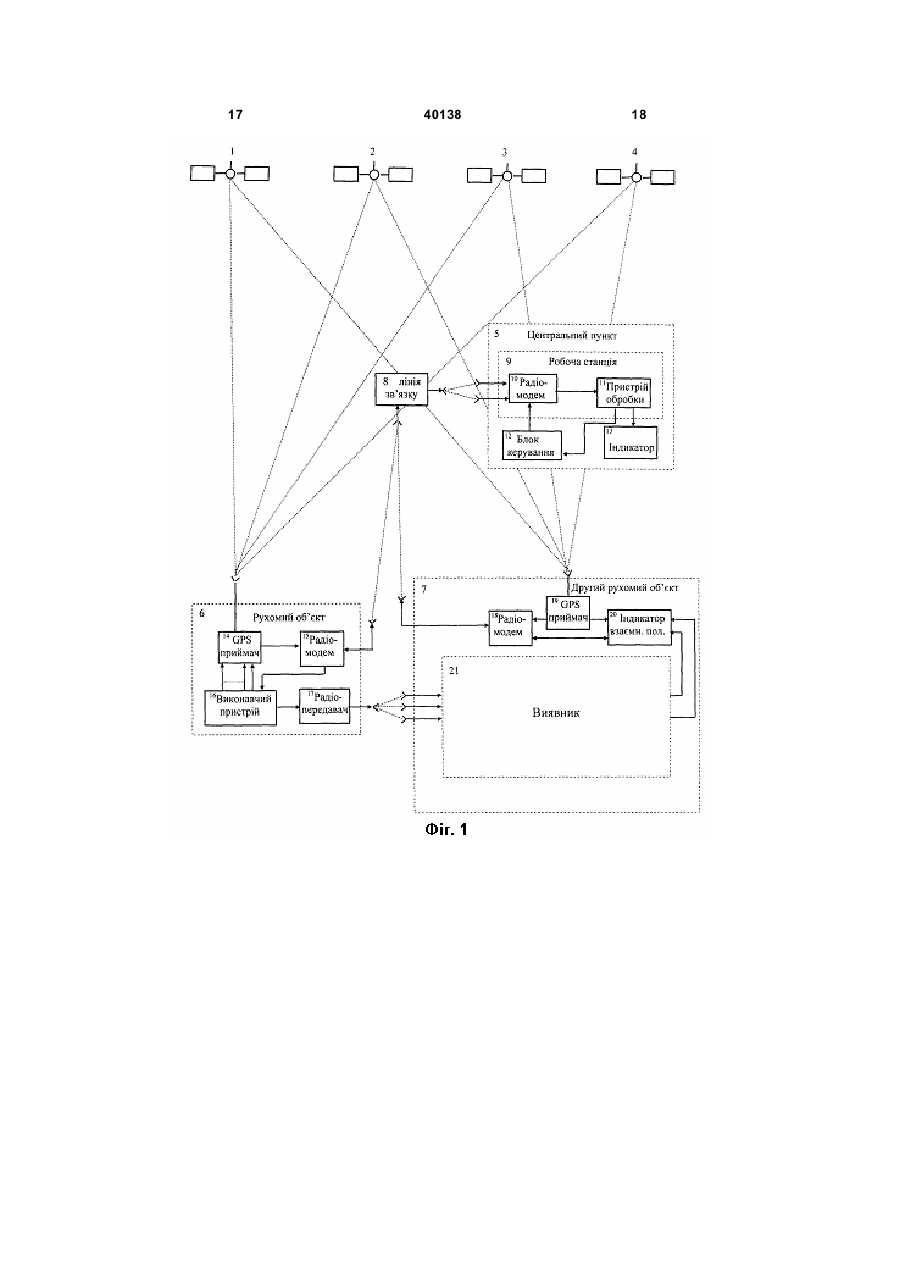
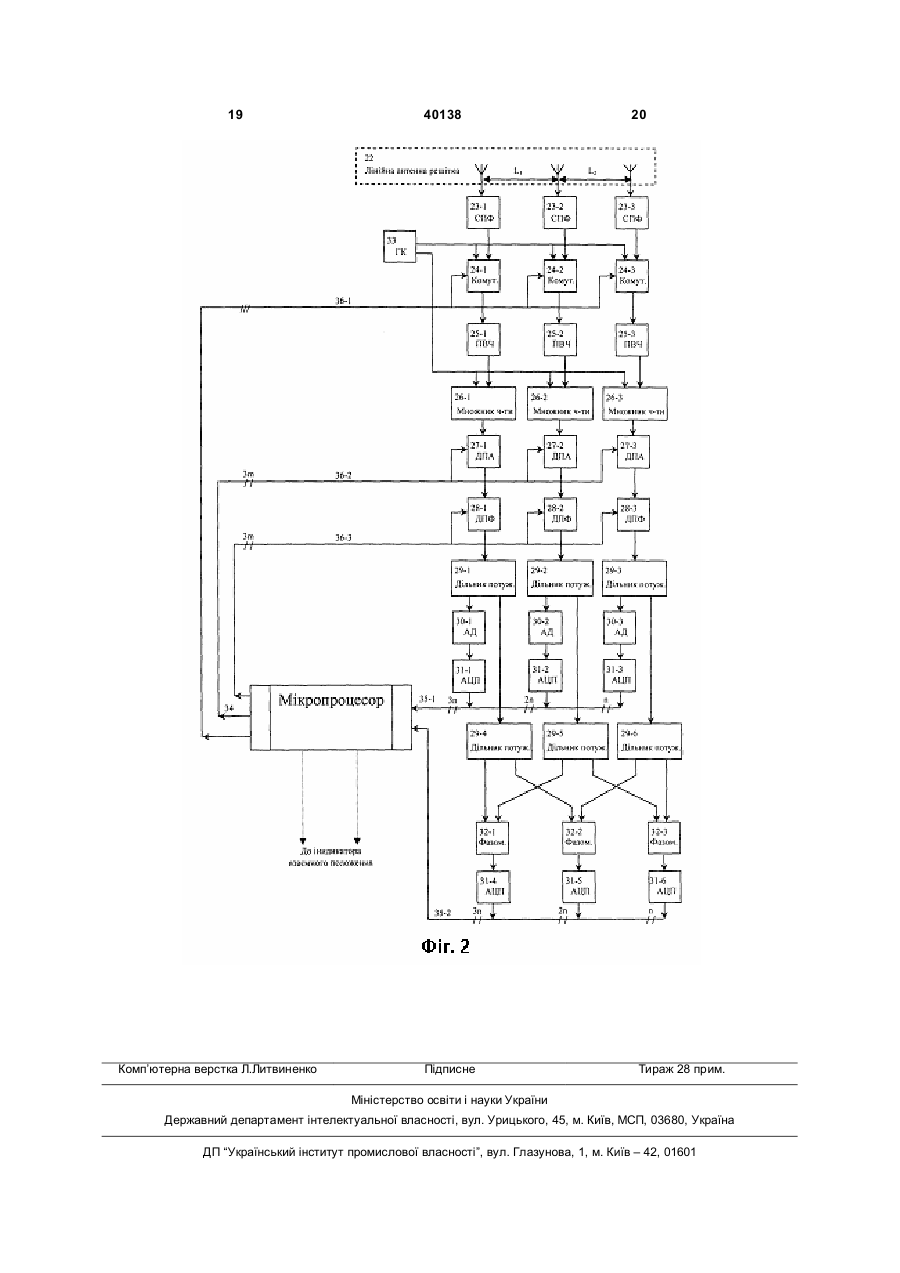
Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радіомодема, перший і другий входи якого є входами сигналів, що надходять від рухомих об'єктів через лінії зв'язку, і пристрою обробки, вхід якого є виходом радіомодема, індикатора, вхід якого є першим виходом пристрою обробки, і блока керування, вхід якого є другим виходом пристрою обробки, а вихід з'єднаний з третім входом радіомодема, перший супроводжуваний рухомий об'єкт, з радіомодемом, другий вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS- приймачем, вихід якого є першим входом радіомодема, а вхід приймача є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи радіонавигації, виконавчим пристроєм з 2N-виходами, вхід якого є виходом радіомодема, і радіомаяком, вхід якого є першим виходом виконавчого пристрою, другий супроводжуючий рухомий об'єкт, що супроводжує перший і містить каскадно з'єднані радіомодем, перший вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS-приймач, вхід якого є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи радіонавігації, а перший вихід є другим входом радіомодема, та індикатор взаємного положення обох рухомих об'єктів, перший вхід якого є виходом радіомодема, а другий вхід з'єднаний з другим виходом GPS-приймача, і виявник, перший вихід якого з'єднаний з третім входом індикатора взаємного положення, що містить лінійну антенну решіт 2 (19) 1 3 40138 4 з'єднана з керуючими входами комутаторів, друга та третя шини - відповідно з вузлами дискретних прецизійних атенюаторів та фазообертачів, а дру гий вихід мікропроцесора є другим виходом виявника. Корисна модель відноситься до радіотехніки, зокрема до систем диспетчеризації рухомих об'єктів, що використовують глобальну супутникову систему радіонавігації, і може бути застосований для контролю пересування і супроводження інкасаторських і патрульних машин, машин екстреної допомоги та інших рухомих об'єктів спеціального призначення, для дистанційного виявлення несанкціонованого доступу, викрадення службових і приватних транспортних засобів. Відома [1] система для визначення місцезнаходження рухомих об'єктів, зокрема, транспортних засобів, що використовує глобальну навігаційну систему, яка складається з 1, 2, 3,..., N супутників, сигнали яких за допомогою встановленого на рухомому об'єкті GPS-приймача дозволяють визначити координати його миттєвого місцезнаходження. Для підвищення точності визначення координат рухомого об'єкта у відомій системі впроваджений, принаймні, ще один опорний GPSприймач, координати місцезнаходження якого точно відомі. Основним недоліком відомої системи є те, що вартість апаратури формування диференційних поправок на основі даних опорного приймача на кілька порядків вища вартості самого GPSприймача. Також відома [2] система супроводження об'єктів, що використовує сигнали штучних супутників землі (ШСЗ) глобальної супутникової системи радіонавігації, яка, на відміну від попередньої системи, дозволяє визначати місцезнаходження кількох рухомих об'єктів завдяки періодичному стробуванню сигналів GPS-приймачів у заданому часовому вікні і наявності пристрою обробки, що знаходиться в центральному пункті, причому швидкість передачі даних на пристрій обробки по каналу передачі нижча швидкості стробування сигналів GPS. Основним недоліком відомої системи є невисока точність визначення місцезнаходження супроводжуваних об'єктів через використання опорного GPS-приймача. Найбільш близькою по технічній суті до запропонованої системи є система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації [3]. Відома система супроводження рухомих об'єктів, обрана в якості прототипу, містить центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радіомодема, перший і другий входи якого є входами сигналів, що надходять від рухомих об'єктів через лінії зв'язку, і пристрою обробки, вхід якого є виходом радіомодема, індика тора, вхід якого є першим виходом пристрою обробки, і блока керування, вхід якого є другим виходом пристрою обробки, а вихід з'єднаній з третім входом радіомодема, перший супроводжуваний рухомий об'єкт, з радіомодемом, другий вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS-приймачем, вихід якого є першим входом радіомодема, а вхід приймача є входом сигналів, що надходять від штучних супутників Землі (ШСЗ) глобальної супутникової системи радіонавігації, виконавчим пристроєм з 2-N- виходами, вхід якого є виходом радіомодема, і радіомаяком, вхід якого є першим виходом виконавчого пристрою, другий супроводжуючий рухомий об'єкт, що супроводжує перший, і що містить каскадно з'єднані радіомодем, перший вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS-приймач, вхід якого є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи радіонавігації, а перший вихід є другим входом радіомодема, та індикатор взаємного положення обох рухомих об'єктів, перший вхід якого є виходом радіомодема, другий вхід з'єднаний з другим виходом GPS-приймача а третій вхід з виявником, що містить лінійну антенну решітку (АР) із чотирма виходами, чотири підсилювачі високої частоти, входи яких з'єднані відповідно з виходами лінійної антенної решітки, два дільники потужності, входи яких з'єднані з виходами другого і третього підсилювача високої частоти відповідно, два фазометри, перші входи яких з'єднані відповідно з виходами першого і четвертого підсилювача високої частоти, а другі відповідно з першими виходами дільників потужності, фазовий дискримінатор, перший і другий входи якого з'єднані відповідно з другими виходами дільників потужності, і мікропроцесор, перший і третій входи якого з'єднані відповідно з виходами фазометрів, а другий вхід є виходом фазового дискримінатора, що також з'єднаний з лінійною антенною решіткою по входу, причому вихід мікропроцесора є виходом виявника. Основними недоліками прототипу є недостатня точність і надійність супроводження, що зв'язано з відмінністю та зміною з часом експлуатації параметрів комплексних коефіцієнтів передачі каналів обробки сигналу та невеликою базою між елементами лінійної антенної решітки, що не дозволяє супроводжувати об'єкт за допомогою виявника на відстанях декількох десятків метрів через недостатню точність фазових дискримінаторів чи фазометрів. 5 В основу корисної моделі поставлена задача створення більш точної системи визначення місцезнаходження й ідентифікації рухомого об'єкту шляхом введення у виявник другого супроводжуючого рухомого об'єкта процесу множення частоти, що дозволяє підвищити точність визначення координат і дальність без підвищення якісних характеристик фазометрів, і введення процедури калібрування амплітудно-фазових характеристик комплексних коефіцієнтів передачі каналів обробки сигналу, що компенсуватиме дрейф характеристик сигналів з часом експлуатації. Також в системі передбачена додаткова корекція амплітуд сигналу в каналах обробки, що зв'язано з ослабленням з розповсюдженням при надходженні сигналу під кутом до нормалі антенної решітки, що проявляється в погіршенні якісних характеристик визначення координат супроводжуваного об'єкту, і набуває особливого значення після процесу множення частоти сигналу. Поставлена задача вирішується тим, що в системі для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить центральний пункт у складі робочої станції, яка складається з каскадно з'єднаних радіомодема, перший і другий входи якого є входами сигналів, що надходять від рухомих об'єктів через лінії зв'язку, і пристрою обробки, вхід якого є виходом радіомодема, індикатора, вхід якого є першим виходом пристрою обробки, і блока керування, вхід якого є другим виходом пристрою обробки, а вихід з'єднаній з третім входом радіомодема, перший супроводжуваний рухомий об'єкт, з радіомодемом, другий вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS-приймачем, вихід якого є першим входом радіомодема, а вхід приймача є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи радіонавігації, які потрапляють у широко кутову діаграму спрямованості його антени, виконавчим пристроєм з 2-N- виходами, вхід якого є виходом радіомодема, і радіомаяком, вхід якого є першим виходом виконавчого пристрою, другий супроводжуючий рухомий об'єкт, що супроводжує перший, і що містить каскадно з'єднані радіомодем, перший вхід якого є входом сигналів, що надходять з центрального пункту через лінії зв'язку, GPS-приймач, вхід якого є входом сигналів, що надходять від штучних супутників Землі глобальної супутникової системи, а перший вихід є другим входом радіомодема, та індикатор взаємного положення обох рухомих об'єктів, перший вхід якого є виходом радіомодема, а другий вхід з'єднаний з другим виходом GPS-приймача, і виявник, перший вихід якого з'єднаний з третім входом індикатора взаємного положення, що містить лінійну антенну решітку, три підсилювачі високої частоти, два дільники потужності на два виходи, два фазометри, фазовий дискримінатор і мікропроцесор, перший і другий входи якого з'єднані відповідно з виходами фазометрів, причому перший вихід мікропроцесора є першим виходом виявника; лінійна антенна решітка виявника виконана трьохелементною і з різними базами між ними, фазовий дискримінатор заміне 40138 6 ний на фазометр, другий вихід виявника з'єднаний з четвертим входом індикатора взаємного положення, і в виявник введені три смугопропускаючі фільтри узгоджені за амплітудно-частотними характеристиками з сигналом радіомаяка, три триплечих комутатори, три множника частоти, три вузли дискретних прецизійних фазообертачів, три вузли дискретних прецизійних атенюаторів, чотири квадратурних дільники потужності, а два існуючих дільники потужності виконані квадратурними, три амплітудних детектори (АД), шість амплітудноцифрових перетворювачів (АЦП), гетеродинкалібратор, дві шини вводу цифрових даних до мікропроцесора та три шини виводу цифрових даних від мікропроцесора. Причому до кожного з виходів трьох антен лінійної антенної решітки каскадно під'єднані смугопропускаючий фільтр, комутатор, підсилювач високої частоти, множник частоти, вузли дискретних атенюаторів та фазообертачів і дільник потужності, перший вихід кожного з трьох з'єднаний з каскадно з'єднаними АД та АЦП, другі виходи - з входами четвертого, п'ятого і шостого дільників потужності, а у третіх виходах в усіх шести дільників потужності розміщені узгоджені навантаження; перші виходи четвертого і шостого дільників потужності з'єднані з першими входами першого і третього фазометрів, йох другі виходи - з входами другого фазометра, а виходи другого дільника потужності - з другими входами першого і третього фазометрів, виходи усіх трьох фазометрів з'єднані відповідно з входами четвертого, п'ятого і шостого АЦП, дві шини вводу цифрових даних у мікропроцесор з'єднані відповідно з виходами першого, другого і третього АЦП та четвертого, п'ятого і шостого; перший вихід гетеродина-калібратора з'єднаний з другими входами комутаторів, а його другий вихід з другими входами множників частоти; перша шина виводу цифрових даних від мікропроцесора з'єднана з керуючими входами комутаторів, друга та третя шини - відповідно з вузлами дискретних атенюаторів та фазообертачів, а другий вихід мікропроцесора є другим виходом виявника. Порівняльний аналіз з прототипом показує, що запропонована система відрізняється наявністю нових блоків і нових зв'язків в структурі виявника другого супроводжуючого рухомого об'єкту. У зв'язку з цим запропонована система відповідає критерію корисної моделі «новизна». На Фіг.1 наведена структурна схема системи для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, а на Фіг.2 - структурна схема виявника. Підвищення точності і надійності визначення місцезнаходження першого супроводжуваного рухомого об'єкта в заявленій системі забезпечується за рахунок підвищення точності вимірювання дальності та пеленгу в виявнику об'єкта, що супроводжує без збільшення бази між елементами АР і якісних характеристик фазометрів завдяки процесу множення частоти сигналів радіомаяка, що оброблюються, який встановлено в об'єкті, що супроводжує, а також за рахунок вирівнювання та калібрування амплітудно-фазових характеристик 7 комплексних коефіцієнтів передачі каналів обробки інформації. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації (Фіг.1, 2) містить: N ШСЗ 1N (не менше 4-х) глобальної супутникової системи радіонавігації; центральний пункт 5; перший супроводжуваний рухомий об'єкт 6; другий супроводжуючий рухомий об'єкт 7, що супроводжує перший, і лінії зв'язку 8, які з'єднують ці об'єкти з центральним пунктом 5. Центральний пункт 5 складається з робочої станції 9, що містить радіомодем 10, перший і другий входи якого є входом сигналів, що надходять від першого супроводжуваного 6 та другого супроводжуючого 7 рухомих об'єктів через лінії зв'язку 8, і пристрій обробки 11, вхід якого є виходом радіомодема 10, блока керування 12, вхід якого з'єднаний з другим виходом пристрою обробки 11, а вихід є третім входом радіомодема 10 робочої станції 5, і індикатора 13, вхід якого є першим виходом пристрою обробки 11. Перший супроводжуваний рухомий об'єкт 6 містить GPS-приймач 14, вхід якого є входом сигналів, що надходять від ШСЗ 1-N глобальної супутникової системи навігації, радіомодем 15, перший вхід якого є виходом GPS-приймача 14, а другий його вхід є входом сигналів, що надходять з центрального пункту 5 через лінії зв'язку 8, виконавчий пристрій з 2-N - виходами 16, вхід якого є виходом радіомодема 15 і радіомаяк 17, вхід якого є першим виходом виконавчого пристрою 16, а його вихід є випромінювачем радіосигналу, а в позаштатній ситуації, й індивідуального коду об'єкта. Другий супроводжуючий рухомий об'єкт 7 містить радіомодем 18, перший вхід якого є входом сигналів, що надходять з центрального пункту 5 через лінію зв'язку 8, GPS-приймач 19, вхід якого є входом сигналів, що надходять від ШСЗ 1-N глобальної супутникової системи навігації, а перший вихід є другим входом радіомодема 18, індикатор взаємного положення 20, перший вхід якого з'єднаний із виходом радіомодема 18, а другий вхід є другим виходом GPS-приймача 19 і виявник 21, два виходи якого з'єднані з третім та четвертим входами індикатора взаємного положення 20. Виявник 21 складається з лінійної АР 22 з трьох елементів і з різними базами між ними, трьох смугопропускаючих фільтрів (СПФ) 23-1-23-3, узгоджених за АЧХ з сигналом радіомаяка, трьох триплечих комутатори 24-1-24-3, трьох підсилювачів високої частоти (ПВЧ) 25-1-25-3, трьох множників частоти 26-1-263, трьох вузлів дискретних прецизійних атенюаторів (ДПА) 27-1-27-3, трьох вузлів дискретних прецизійних фазообертачів (ДПФ) 28-1-28-3, шести квадратурних дільників потужності на мостовій схемі 29-1-29-6, трьох АД 30-1-30-3, шести АЦП 31-1-31-6, трьох фазометрів 32-1-32-3, гетеродина-калібратора 33, мікропроцесора 34, дві шини вводу цифрових даних до мікропроцесора 35-1, 35-2, три шини виводу цифрових даних від мікропроцесора 36-1-36-3. Причому до кожного з виходів трьох антен лінійної АР 22 каскадно під’єднані СПФ 23-1-23-3, комутатори 24-1-24-3, ПВЧ 25-1-25-3, множники частоти 26-1-26-3, вузли дискретних атенюаторів 40138 8 27-1-27-3 та фазообертачів 28-1-28-3 і дільники потужності 29-1-29-3, перший вихід кожного з трьох з'єднаний з каскадно з'єднаними АД 30-1-303 та АЦП 31-1-31-3, другі виходи - з входами четвертого, п'ятого і шостого дільників потужності 294-29-6, а у третіх виходах в усіх шести дільників потужності 29-1-29-6 розміщені узгоджені навантаження; перші виходи четвертого 29-4 і шостого 29-6 дільників потужності з'єднані з першими входами першого 32-1 і третього 32-3 фазометрів, йох другі виходи - з входами другого 32-2 фазометра, а виходи п'ятого 29-5 дільника потужності - з другими входами першого 32-1 і третього 32-3 фазометрів, виходи усіх трьох фазометрів 32-1-32-3 з'єднані відповідно з входами четвертого 31-4, п'ятого 31-5 і шостого 31-6 АЦП; дві шини 35-1 і 352 вводу цифрових даних у мікропроцесор 34 з'єднані відповідно з виходами першого, другого і третього АЦП 31-1-31-3 та четвертого 31-4, п'ятого 315 і шостого 31-6; перший вихід гетеродинакалібратора 33 з'єднаний з другими входами комутаторів 24-1-24-3, а його другий вихід з другими входами множників частоти 26-1-26-3; перша 36-1 шина виводу цифрових даних від мікропроцесора 34 з'єднана з керуючими входами комутаторів 241-24-3, друга 36-2 та третя 36-3 шини - відповідно з вузлами ДПА 27-1-27-3 та ДПФ 28-1-28-3, а другий вихід мікропроцесора 34 є другим виходом виявника 21. Система (Фіг.1) для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації працює таким чином. Як і в системі-прототипі вона визначає місцезнаходження першого супроводжуваного рухомого об'єкта 6, використовуючи сигнали від ШСЗ 1-4. Для цього в першому супроводжуваному рухомому об'єкті 6 установлений GPS-приймач 14, що по сигналах не менш ніж із чотирьох супутників 1-4 визначає своє місцезнаходження і з заданою дискретністю за допомогою радіомодема 15 першого супроводжуваного рухомого об'єкта 6 і радіомодема 10 центрального пункту 5 передає через лінію зв'язку 8 свої координати на центральний пункт 5, де вони аналізуються в пристрої обробки 11 робочої станції 9 і відображаються на індикаторі 13 оператора, а в разі потреби і запам'ятовуються. Точність визначення координат складає 5-10м, але у ряді випадків вона являється недостатньою, особливо при супроводженні цінних і небезпечних вантажів в умовах міста і гірської місцевості, коли відбувається часткове або повне екранування сигналів від ШСЗ 1-N. Тому для особливих випадків (супроводження, пошук) здійснюється спільна обробка інформації з другого супроводжуючого рухомого об'єкта 7, який визначає свої координати за допомогою GPSприймача 19 і зв'язаний з центральним пунктом 5 за допомогою радіомодема 18 другого супроводжуючого рухомого об'єкта 7, радіомодема 10 центрального пункту 5 і ліній зв'язку 8. Для цього його координати відображаються на індикаторі 13 робочої станції 9 і на індикаторі взаємного положення 20, на який з центрального пункту 5 поступають координати першого супроводжуваного рухомого 9 40138 об'єкта 6, що дозволяє визначити координати останнього з точністю менше 5м [4]. Ці відносні координати відображаються на індикаторі взаємного положення 20. Однак, введення такої обробки хоча і забезпечує підвищення точності визначення координат, але не вирішує цілком проблему супроводження в міській зоні і на різко пересіченій місцевості через екранування сигналів з супутників, яке має місце, а значить, і похибок у визначенні координат. Крім того, при спробах захоплення першого супроводжуваного рухомого об'єкта 6 по GPS-приймачам 14, 19 обох рухомих об'єктів можуть бути застосовані [5] навмисні активні перешкоди, що можуть цілком нейтралізувати процес визначення свого місцезнаходження. Тому для цих випадків у систему впроваджена додаткова автономна підсистема визначення дальності й пеленгу, до складу якої входять: радіомаяк (передавач) 17 у першому супроводжуваному рухомому об'єкті 6 і виявник 21, що знаходиться в другому супроводжуючому рухомому об'єкті 7. Ця підсистема може працювати й у звичайних (не екстремальних) умовах і шляхом комплексування обробки інформації підвищити точність визначення координат першого супроводжуваного рухомого об'єкта 6. Принцип дії зазначеної підсистеми полягає в наступному. Радіомаяк (передавач) 17 випромінює сигнали узгоджені з смугопропускаючим фільтром 10 виявника. Ці сигнали можуть нести індивідуальний код першого супроводжуваного рухомого об'єкта 6, що дуже важливо у випадку великої кількості контрольованих транспортних засобів і при їхньому викраденні, оскільки ці сигнали можна запеленгувати і при знаходженні викрадених об'єктів у частково екранованих приміщеннях (гаражах, трейлерах і т.д.). Причому, при установці радіомаяка (передавача) 17 на першому супроводжуваному рухомому об'єкті 6 потрібно передбачити комплекс заходів, що ускладнять його візуальне виявлення (приховане розташування апаратури, маскування антен під елементи конструкції об'єкта, автономне живлення та ін.). У випадку відсутності другого супроводжуючого рухомого об'єкта 7 пошук викрадених транспортних засобів по сигналах радіомаяка (передавача) 17 здійснюється відомими методами пеленгування джерела випромінювання. При наявності другого супроводжуючого рухомого об'єкта 7 його виявник 21 у реальному масштабі часу видає на індикатор взаємного положення 20 пеленг на перший супроводжуваний рухомий об'єкт 6 і дальність до нього. Ці дві координати в системі добуваються із кривизни фазового фронту електромагнітних хвиль (ЕМХ), що випромінюються радіомаяком (передавачем) і, як показано в роботи авторів [6] дальність можна визначити за допомогою наступних відношень, що отримані для однакових відстаней (L) між елементами АР: 8p 2L2 - l2 æ Dj 2 + D j2 ö ç 1 2÷ l2 D Dj × (D j1 + D j2 ) ø= è , d= 4 p(4 pL sin b - l (Dj1 + Dj 2 )) 4 plDD j де l - довжина хвилі сигналу радіомаяка 17; b - пеленг; Dj1 - різниця фаз між першим і другим антенним елементом решітки 22; Dj2 - різниця фаз між другим і третім антенним елементом решітки 22; DDj=Dj2-Dj1 - різниця різниць фаз між суміжними антенними парами - інформаційний параметр, однозначно зв'язаний із дальністю d до джерела радіовимірювання; ö æ ç l (Dj1 + Dj 2 )é8 p 2L2 - 2 l2 Dj1Dj 2 ù ÷ ê ú÷ ë û , ç b = arcsinç æ 2 2 2æ 2 2 öö ÷ ç 4 pLç 8p L - l ç Dj1 + Dj 2 ÷ ÷ ÷ øø ø è è è (2) æ ç 1 b » arcsinç ç 2pL ç è ö 2 8p 2L2 - l2 æ Dj1 + Dj2 ö ÷ ç 2÷ ÷ è ø , ÷ 2 ÷ ø значення дальності і пеленга виявником через не ідентичності характеристик його прийомних каналів і недостатній точності фазометрів (2,3°). Так, наприклад, значення DDj при вимірюванні дальності по кривизні хвильового фронту може сягати декількох десятих або навіть сотих градуса - практично плоский фронт (d=100-1000м), тому виникає задача підвищення точності вимірювання DDj, оскільки вона обмежує максимальну межу визначення дальності значенням: dгр » або при L
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for following movable objects with use of signals of global satellite system of radio-navigation
Автори англійськоюAvdeenko Hlib Leonidovych, Veselova Anastasia Petrivna, Ilchenko Mykhailo Yukhymovych, Mazurenko Oleksandr Viktorovych, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюСистема для сопровождения подвижных объектов с использованием сигналов глобальной спутниковой системы радионавигации
Автори російськоюАвдеенко Глеб Леонидович, Веселова Анастасия Петровна, Ильченко Михаил Ефимович, Мазуренко Александр Викторович, Якорнов Евгений Аркадиевич
МПК / Мітки
МПК: G01S 5/14
Мітки: система, глобальної, радіонавігації, системі, сигналів, використанням, об'єктів, супроводження, супутникової, рухомих
Код посилання
<a href="https://ua.patents.su/10-40138-sistema-dlya-suprovodzhennya-rukhomikh-obehktiv-z-vikoristannyam-signaliv-globalno-suputnikovo-sistemi-radionavigaci.html" target="_blank" rel="follow" title="База патентів України">Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації</a>
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 8150
Опубліковано: 15.07.2005
Автори: Якорнов Євгеній Аркадійович, Авдєєнко Гліб Леонідович, Саричев Юрій Олексійович, Копитко Ігор Йосипович, Жукова Маргарита Василівна
МПК: G01S 5/14
Мітки: система, сигналів, супроводження, використанням, системі, глобальної, супутникової, радіонавігації, об'єктів, рухомих
Формула / Реферат:
Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить центральний пост у складі робочої станції з двома приймально-передавальними антенами, що складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід якого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід якого з'єднаний з першим виходом робочої станції, який є другим...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 57534
Опубліковано: 16.06.2003
Автори: Вдовіченко Наталія Євгенівна, Федоров Володимир Іванович, Якорнов Євгеній Аркадійович, Рогов Петро Дмитрович, Саричев Юрій Олексійович, Копитко Ігор Йосипович
МПК: G01S 5/14
Мітки: супутникової, система, сигналів, глобальної, використанням, супроводження, системі, радіонавігації, рухомих, об'єктів
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радіомодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радіомодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 63867
Опубліковано: 15.01.2004
Автори: Левшенко Олександр Семенович, Якорнов Євгеній Аркадійович, Копитко Ігор Йосипович, Рогов Петро Дмитрович, Ільченко Михайло Юхимович
МПК: G01S 5/14
Мітки: супутникової, система, супроводження, сигналів, радіонавігації, використанням, об'єктів, рухомих, системі, глобальної
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали штучних супутників Землі глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, лінії зв'язку, на які надходять сигнали з виходу...
Система диспетчерського керування рухомими біологічними об`єктами з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 39917
Опубліковано: 25.03.2009
Автори: Газнюк Максим Олександрович, Вишнякова Євгенія Вікторівна, Куценко Олександр Вікторович, Харченко Володимир Петрович, Трикоз Валерій Павлович, Кондратюк Василь Михайлович, Погурельський Олексій Сергійович
МПК: G01S 5/14
Мітки: радіонавігації, система, супутникової, використанням, рухомими, біологічними, об'єктами, системі, сигналів, глобальної, диспетчерського, керування
Формула / Реферат:
Система диспетчерського керування рухомими біологічними об'єктами з використанням сигналів глобальної супутникової системи радіонавігації (GPS), що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову...
Система диспетчерського керування рухомими об’єктами з використанням сигналів глобальної супутникової системи радіонавігації

Номер патенту: 75709
Опубліковано: 15.05.2006
Автори: Дмитриченко Микола Федорович, Баранов Георгій Леонідович, Дмитрієв Микола Миколайович, Топольськов Євген Олександрович, Левковець Петро Романович, Кондратюк Василь Михайлович, Кошовий Анатолій Андрійович, Бєляєвський Леонід Степанович
МПК: G01S 5/14
Мітки: рухомими, диспетчерського, радіонавігації, супутникової, об'єктами, використанням, глобальної, сигналів, система, системі, керування
Формула / Реферат:
Система диспетчерського керування рухомими об'єктами з використанням сигналів глобальної супутникової системи радіонавігації, що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму...
Попередній патент: Пристрій для контролю торкання різального інструмента до деталі при токарній обробці
Наступний патент: Антифрикційний композиційний матеріал
Випадковий патент: Система супутникового зв'язку, яка використовує паралельно каскадне кодування