Система диспетчерського керування рухомими об’єктами з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 75709
Опубліковано: 15.05.2006
Автори: Бєляєвський Леонід Степанович, Кондратюк Василь Михайлович, Дмитрієв Микола Миколайович, Левковець Петро Романович, Топольськов Євген Олександрович, Дмитриченко Микола Федорович, Кошовий Анатолій Андрійович, Баранов Георгій Леонідович

Формула / Реферат
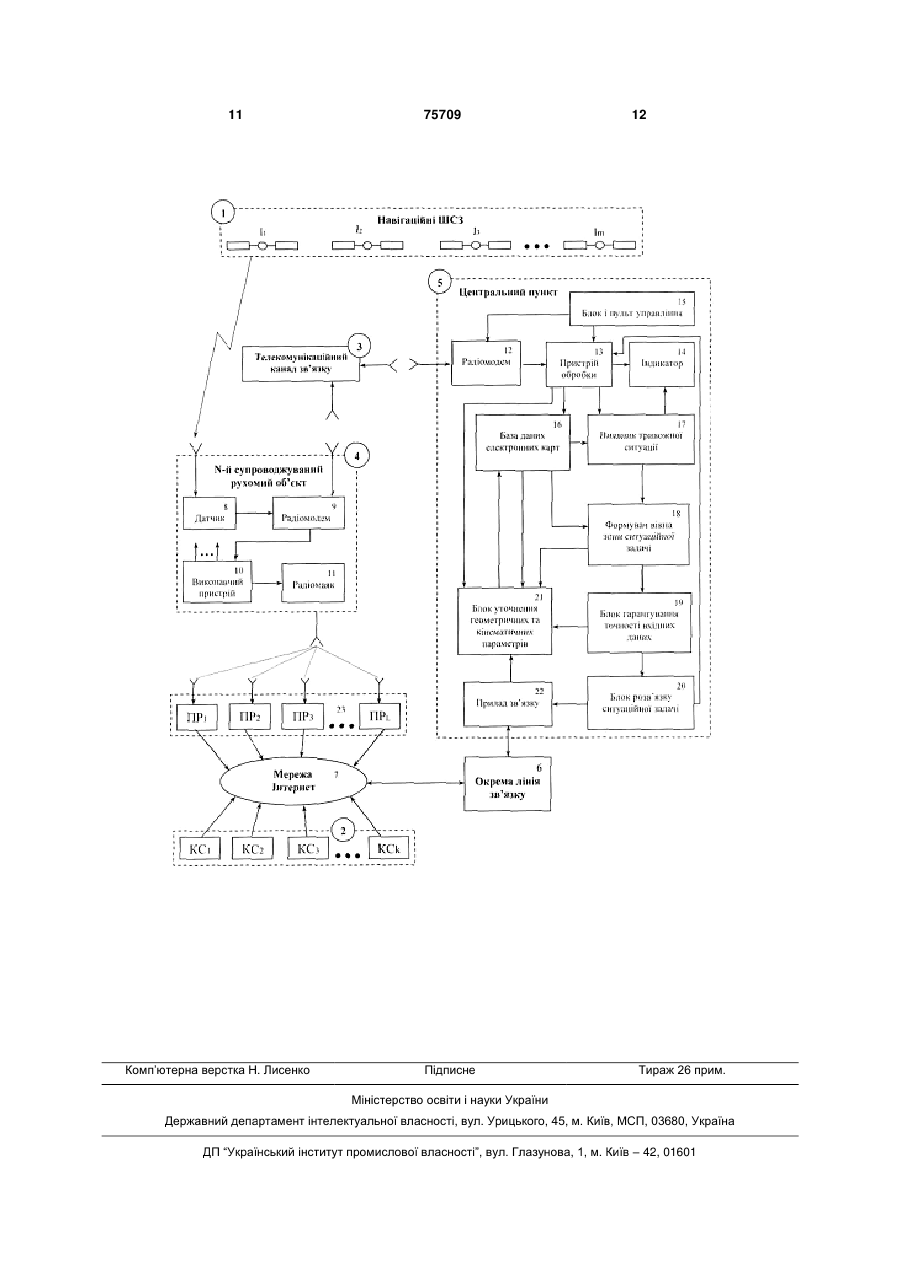
Система диспетчерського керування рухомими об'єктами з використанням сигналів глобальної супутникової системи радіонавігації, що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті, центральний пункт у складі каскадно з'єднаних радіомодема, на перший та другий входи якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, встановлених на N супроводжуваних рухомих об'єктах, пристрою обробки, вхід якого є виходом радіомодема, а вихід його є входом індикатора оператора центрального пункту, який відповідно ситуації через пульт керування змінює режими роботи блока керування, вихід якого є третім входом радіомодема, яка відрізняється тим, що в неї додатково введені блок уточнення геометричних та кінематичних параметрів, перший вхід якого є виходом приладу зв'язку, другий вхід є першим додатковим виходом пристрою обробки, третій вхід є першим виходом бази даних електронних карт, четвертий вхід є першим виходом формувача вікна зони ситуаційної задачі, а п'ятий вхід є першим виходом блока гарантування точності вхідних даних, другий вихід якого є входом блока розв'язки ситуаційної задачі, перший та другий виходи якого, відповідно, є другим входом приладу зв'язку і другим входом пристрою обробки, третій та четвертий виходи якого, відповідно, зв'язані з першим входом бази даних електронних карт та першим входом виявника тривожної ситуації, другий вхід якого є другим виходом бази даних електронних карт, другий вхід якої є виходом блока уточнення геометричних та кінематичних параметрів, перший та другий входи формувача вікна зони ситуаційної задачі, відповідно, з’єднані з третім виходом бази даних електронних карт і другим виходом виявника тривожної ситуації, перший вихід якого є додатковим входом індикатора, перший вхід блока гарантування точності вхідних даних є другим виходом формувача вікна зони ситуаційної задачі; прилад зв'язку центрального пункту, який має двосторонню комутацію з окремою лінією зв'язку, що забезпечує доступ до сервера мережі Інтернет, куди надходять у реальному часі дані від К контрольних та опорних станцій, а також L пунктів радіоспостереження, антени яких приймають сигнал від радіомаяка N-гo супроводжуваного рухомого об'єкта, а їх виходи передають прийняті сигнали радіомаяків через мережу Інтернет та окрему лінію зв'язку на прилад зв'язку центрального пункту.
Текст
Система диспетчерського керування рухомими об'єктами з використанням сигналів глобальної супутникової системи радіонавігації, що містить N супроводжуваних об'єктів, кожний з яких має радіомодем, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, датчик (GPS приймач), вихід якого є першим входом радіомодема, а на вхід цього датчика надходять навігаційні сигнали, які потрапляють у ширококутову діаграму спрямованості антен, що закріплені на кожному рухомому об'єкті, центральний пункт у складі каскадно з'єднаних радіомодема, на перший та другий входи якого через телекомунікаційні канали зв'язку надходять сигнали від радіомодемів, встановлених на N супроводжуваних рухомих об'єктах, пристрою обробки, вхід якого є виходом радіомодема, а вихід його є входом індикатора оператора центрального пункту, який відповідно ситуації через пульт керування змінює режими роботи блока керування, вихід якого є третім входом радіомодема, яка відрізняється тим, що в неї додатково введені блок уточнення геометричних C2 2 UA 1 3 75709 4 дження і управління рухомими об'єктами різного рухомого об'єкту у складі: радіомодема, на другий або спеціального призначення в усіх експлуатавхід якого через лінії зв'язку надходять сигнали з ційних умовах включаючи передаварійний стан, центрального пункту, і датчика (GPS приймача), несанкціонований доступ, викрадення транспортвихід якого є першим входом радіомодема, а на ного засобу та використання всупереч завданням вхід датчика (GPS приймача) надходять сигнали та інтересам власника. від навігаційних ШСЗ глобальної навігаційної супуВідома система для визначення місцезнахотникової системи, що знаходяться у зоні радіовидження рухомих об'єктів, зокрема, транспортних димості датчика (GPS приймача). засобів, що використовує глобальну навігаційну Основними недоліками прототипу є: недостатсупутникову систему GNSS, наприклад GPS ня точність і якість супроводження N транспортних (Navstar), ГЛОНАСС, Галілео, що складається з її, засобів, що пов'язано з нестаціонарністю простору І2, І3,..., Іm навігаційних штучних супутників Землі радіоканалу, стохастичністю та невизначеністю (ШСЗ), сигнали яких за допомогою встановленого динаміки якості прийому сигналів з навігаційних на рухомому об'єкті приймача сигналів декількох ШСЗ, особливо в районах із значною забудовою, навігаційних ШСЗ дозволяють визначити координа різко пересіченій місцевості (яри, ліси, гори тонати його миттєвого місцезнаходження [див. заявщо), а також в умовах навмисного створення рака WO №93/09446,. клас G01S5/00,5/14, діозавад для забезпечення угонів транспортних 13.05.1993]. Для підвищення точності визначення засобів або виконання терористичних актів, що у координат транспортних засобів у відомій системі сукупності суттєво підвищує складність і знижує додатково впроваджено опорний GPS приймач, економічні показники такої системи. координати місцезнаходження якого геодезичне Задачею, на рішення якої спрямований винаприв'язані і точно відомі. хід, є створення більш ефективної та економічної Недоліком відомої системи є те, що вартість системи диспетчерського управління рухомими апаратури формування диференційних виправоб'єктами, яка відповідно динамічній ситуації, що лень на основі даних опорного GPS приймача на виникає внаслідок руху N об'єктів та зміни відстакілька порядків вища вартості самого мобільного ней між ними, забезпечує підвищення точності GPS приймача. Крім цього, для забезпечення нерозв'язку ситуаційної задачі управління у центраобхідної точності визначення координат багатьох льному пункті за рахунок більш точної ідентифікасупроводжуваних рухомих об'єктів у відомій сисції кожного рухомого об'єкта, який знаходиться в темі потрібно реалізувати диференційний режим просторово часовому вікні супроводження та обна кожному з них, що є економічно невигідним ріладнаний радіомодемом, датчиком на основі GPS шенням. приймача, виконавчим пристроєм і радіомаяком, Відома система супроводження рухомих об'єкщо досягається завдяки введенню у центральний тів, що використовує навігаційні сигнали ШСЗ, яка, пункт наступних додаткових елементів: пульта і на відміну від попередньої системи, дозволяє виблока управління, бази даних електронних карт з значати місцезнаходження кількох транспортних геодезичною прив'язкою опорних станцій, які назасобів завдяки періодичному стробуванню сигнадають диференційні коригуючі повідомлення, та лів GPS приймачів у заданому часовому вікні та опорних вузлових точок місцевості, що визначають наявності пристрою обробки, що знаходиться у базові відстані та кути напрямку унікальних трацентральному пункті, причому швидкість передачі нспортних шляхів, виявника тривожної ситуації, даних на пристрій обробки по каналу передачі формувача просторово-часового вікна зони ситуанижча швидкості стробування сигналів GPS прийційної задачі, що виникла внаслідок порушення мача [див. патент ЕПВ №0545636, Μ.кл. регламентних співвідношень, блока уточнення G01S5/00,5/14, 09.06.1993]. геометричних та кінематичних параметрів ситуаОсновним недоліком цієї відомої системи є ційної задачі, блока адаптивного гарантованого невисока точність визначення місцезнаходження забезпечення рівня точності вхідних даних для багатьох транспортних засобів, що супроводжурухомих об'єктів у межах вікна зони ситуаційної ються за рахунок використання опорного GPS задачі, блока розв'язку ситуаційної задачі та повеприймача, який працює у режимі контрольнорнення у нормальний експлуатаційний режим сукоригуючої станції (ККС). проводження транспортних засобів (коли відсутня Найбільш близькою за технічною суттю до затривожна ситуація), приладу зв'язку для отриманпропонованої системи є система для супровоня у реальному часі даних через мережу Інтернет; дження рухомих об'єктів з використанням сигналів які дозволяють не встановлювати на центральноглобальної супутникової системи радіонавігації му пункті опорний GPS приймач і відповідну доро[див. патент ЕПВ №0512789, Μ. кл. G01S5/14, гу апаратуру визначення диференційних виправ5/00, 11.11.1992]. Відома система супроводження лень, але забезпечують при цьому помилку рухомих об'єктів, що обрана в якості прототипу, відносно координат місцезнаходження супровомістить центральний пункт рішення задач контроджуваного об'єкта не більше 1м. лю, супроводження та управління рухомими об'єкПоставлена задача вирішується тим, що у ситами у складі; GPS приймача, робочої станції, яка стему диспетчерського управління рухомими об'єскладається з каскадно з'єднаних радіомодема, на ктами з використанням сигналів глобальної супутперший та другий входи якого через лінії зв'язку никової системи радіонавігації, що містить N надходять сигнали від кожного супроводжуваного супроводжуваних об'єктів, кожний з яких має рарухомого об'єкту, пристрою обробки, вхід якого є діомодем, на другий вхід якого через телекомунівиходом радіомодема, та індикатора, вхід якого є каційний канал зв'язку надходять сигнали з виходом пристрою обробки, супроводжуваного центрального пункту, і датчик (GPS приймач), ви 5 75709 6 хід якого є першим входом радіомодема, а на вхід ординат їх місцезнаходження та миттєву швидцього датчика надходять навігаційні сигнали, які кість руху, одержуваних через телекомунікаційний потрапляють у ширококутову діаграму спрямоваканал зв'язку з центральним пунктом системи, ності антен, що закріплені на кожному рухомому який одночасно отримує додаткову інформацію в об'єкті, центральний пункт у складі: каскадно з'єдреальному часі по окремій лінії зв'язку між меренаних радіомодема, на перший та другий входи жею Інтернет, до якої підключені контрольні та якого через лінії телекомунікаційного каналу зв'язопорні станції, що постійно надають коригуючі поку надходять сигнали від N супроводжуваних рувідомлення для коригування (підвищення точності хомих об'єктів, пристрою обробки, вхід якого є вивизначення) координат місцезнаходження рухомих ходом радіомодема, а вихід його є входом об'єктів. Крім того, нові додаткові блоки на індикатора оператора центрального пункту, який центральному пункті разом з базою даних електвідповідно ситуації через пульт управління змінює ронних карт дозволяють гарантовано здійснювати режими роботи блока управління, вихід якого є адаптивне управління у випадках виникнення нетретім входом радіомодема, у відповідності з вирегламентованих анормальних ситуацій, що винаходом введені додатково прилад зв'язку для значає виявник тривожної ситуації, який своєчасно передачі службових повідомлень та отримання у організовує контур адаптивного забезпечення точреальному часі даних по окремій лінії зв'язку з ності вихідних даних під конкретну (ситуаційно мережі Інтернет, до якої підключені контрольні та визначену) задачу управління транспортними заопорні станції (КС), що надають коригуючі повідособами та іншими рухомими об'єктами. млення для уточнення координат розташування Гарантування точності координат рухомих та користувачів, до категорії яких відноситься інших об'єктів, що потрібні для розв'язку поточної центральний пункт, перший вхід блока уточнення задачі управління досягається за рахунок цілеспгеометричних та кінематичних параметрів якого є рямованого вибору з бази даних електронних карт виходом приладу зв'язку, другий вхід є першим координат геодезичне точно визначених точок та додатковим виходом пристрою обробки, третій базових шляхів-ліній, а також сукупності регіонавхід є першим виходом бази даних електронних льне доцільних повідомлень з коригуючими дифекарт, четвертий вхід є першим виходом формуваренційними даними, які у сукупності, що контролюча вікна зони ситуаційної задачі, п'ятий вхід є перється блоком гарантування точності вхідних даних, шим виходом блока гарантування точності вхідних забезпечують цілеспрямовану комплексну обробку даних, другий вихід якого є входом блока розв'язки різнорідної надлишкової інформації про системні ситуаційної задачі управління, перший та другий відношення геометричних та кінематичних паравиходи якого, відповідно, є другим входом приладу метрів у межах ситуаційно визначеного графу, зв'язку і другим входом пристрою обробки, третій кількість точно визначених вершин якого дорівнює та четвертий виходи якого відповідно зв'язані з або перевищує кількість вершин, що характеризупершим входом бази даних електронних карт та ють супроводжувані рухомі об'єкти у просторовопершим входом виявника тривожної ситуації, дручасовій зоні даної ситуаційної задачі, яка виникла гий вхід якого є другим виходом бази даних електвнаслідок неконтрольованих випадкових факторів ронних карт, другий вхід якої є виходом блока утоприродного або соціального змісту (неадекватність чнення геометричних та кінематичних параметрів, виконання завдання, спроба захоплення, терорисперший та другий входи формувача вікна зони тичного акту, викрадення та інш.). ситуаційної задачі, відповідно, поєднані з третім На кресленні наведена структурна схема сисвиходом бази даних електронних карт і другим теми диспетчерського управління транспортними виходом виявника тривожної ситуації, перший визасобами та іншими рухомими об'єктами з викорихід якого є додатковим входом індикатора, перший станням сигналів глобальної супутникової системи вхід блока гарантування точності вхідних даних є радіонавігації. Згідно креслення дана система місдругим виходом формувача вікна зони ситуаційної тить: m навігаційних ШСЗ (І1–Іm) глобальної навізадачі, прилад зв'язку центрального пункту має гаційної супутникової ситеми радіонавігації 1; k двосторонню комутацію з окремою лінією зв'язку, контрольних та опорних станцій (КС1-KCk) дифещо забезпечує доступ до серверу мережі Інтернет, ренційної наземної підсистеми глобальної супуткуди надходять поточні дані від k контрольних і никової системи радіонавігації 2, телекомунікаційопорних станцій, а також L пунктів радіоспостерений канал зв'язку 3 між N рухомими об'єктами 4 та ження, антени яких приймають сигнал від радіоцентральним пунктом 5, окрему лінію зв'язку 6, яка маяка N-ro супроводжуваного рухомого об'єкта, а з'єднує центральний пункт 5 з мережею Інтернет 7, їх виходи надають прийняті сигнали радіомаяків датчик (GPS приймач) 8, радіомодем 9, виконавчерез мережу Інтернет та окрему лінію зв'язку на чий пристрій 10, радіомаяк 11, які встановлені на прилад зв'язку. N-му рухомому об'єкті; радіомодем 12, пристрій Підвищення ефективності та якості роботи сиобробки 13, індикатор 14, блок і пульт управління стеми диспетчерського управління рухомими об'є15, базу даних електронних карт 16, виявник триктами обумовлено точністю та оперативністю розвожної ситуації 17, формувач вікна зони ситуаційв'язку тривожної ситуації, що випадково виникає з ної задачі 18, блок гарантування точності вхідних окремими рухомими об'єктами, супроводження даних 19, блок розв'язку ситуаційної задачі 20, яких в заявленій системі забезпечується за рахублок уточнення геометричних та кінематичних панок нової структурно-функціональної організації раметрів 21, прилад зв'язку 22, мережу L пунктів роботи центрального пункту, що супроводжує N радіоспостереження (ПР1-ПРL) сигналів 23. рухомих об'єктів з майже аналогічною бортовою Порівняльний аналіз з прототипом показує, що апаратурою, яка надає оперативні дані щодо козапропонована система диспетчерського управ 7 75709 8 ління транспортними засобами та іншими рухомиУ пристрої обробки 13 здійснюється розв'язок сисми об'єктами відрізняється наявністю нових блоків теми алгебраїчних рівнянь, що цілеспрямовано і нових зв'язків між елементами системи, які засформовані для забезпечення компенсації квазибезпечують нові якісні властивості, що дозволяє систематичних помилок, які обумовлені недолікастворювати більш економічну систему диспетчерми координатно-часового забезпечення навігаційського управління рухомими об'єктами. Таким чиних космічних сигналів від ШСЗ I1–Іm, ном, запропонована система відповідає критерію нестаціонарністю поширення радіохвиль в атмосвинаходу "новизна". фері Землі та іншими факторами, включаючи неСистема працює наступним чином. стаціонарне екранування сигналів. При супроводженні рухомих об'єктів 4 викориКонтрольні станції 2 використовують GPS стовують GPS приймачі (датчики) 8 сигналів глоприймачі типу АОА-АСТ Benchmarks, Turboбальної супутникової системи радіонавігації (наRogues, Ashtech Ζ-12 та операційну систему UNIX. приклад "Navstar"), що встановлені на рухомих В якості телекомунікаційного каналу зв'язку 3 можоб'єктах. Основні принципи визначення координат на використовувати супутниковий зв'язок за допомогою супутникових радіонавігаційних сисINTELSAT, INMARSAT, EUTELSAT, мобільний тем широко висвітлені в науково-технічній літеразв'язок стандарту NMT, GSM або транкінговий турі [див. Сетевые спутниковые радионавигационзв'язок з контролером на мікропроцесорі INTEL в ные системы / Под ред. В.С.Шебшаевича. 2-е изд. залежності від зони обслуговування центрального - M.: Радио и связь, 1993. -408с.; Гофманпункту. Радіомодеми 9, 12 підбираються під станВеленгоф Б., Колінз Д. Глобальна система визнадарт радіозв'язку. Датчик (GPS приймач) 8 можна чення місцеположення (GPS) Теорія та практика. використовувати типу NovAtel 3151R, Lassen SK8, Пер. з англ. Під ред, Я.Ц.Яцніна. - K.: Наук. Думка, АСЕ2 та інш. 1996. -387с.; Соловьев Ю.А. Системы спутниковой Блок управління та пульт управління 15 - це навигации. - Μ.: Эко-Тренд. 2000. -267с.]. Датчик персональний комп'ютер типу Pentium 4. У якості (GPS приймач) 8 по навігаційним сигналам не пристрою обробки 13 використовується ПЕОМ зі менш ніж чотирьох супутників (I1-I4) визначає місспеціальним програмним забезпеченням, що здійцезнаходження N-го рухомого об'єкта 4, радіомоснює управління на маршруті, яким рухається судем 9 якого із заданою дискретністю передає випроводжуваний рухомий об'єкт, з використанням значені координати через телекомунікаційний координатних орієнтирів [див. А.С. 1487689, Α1 М. канал зв'язку 3 на радіомодем 12 центрального кл. G05D1/02 від 14.04.86 та AC. СРСР 1403849 Α1 пункту 5, де вони аналізуються у пристрої обробки Μ. кл. G05D1/02 від 15.10.86]. Індикатор 14 - це 13 та результати відображаються на індикаторі 14 монітор персонального комп'ютера. оператора системи, а в разі потреби записуються Виконавчий пристій 10 - це реле [див. Патент у базу даних електронних карт з S шарами 16. №2027195, (Росія) Спутниковая система для Точність визначення координат приймачем GPS определения местоположения судов и самолѐтов, NovAtel 3151R складає 5-10м., але у ряді випадків, потерпевших аварию., М. кл. G01S5/1 // Дикарев особливо під час руху транспортних засобів в умоВ.И. и др.]. Радіомаяк (передавач) 11 - це генеравах міста і сильно мінливої місцевості де відбуватор на діоді Гана. ється часткове або повне екранування сигналів База даних електронних карт 16 це сервер із навігаційних ШСЗ, а також при неможливості роспеціалізованим програмним забезпеченням [див. боти GPS приймача на час зловмисного створення Вагущенко Л.Л., Ранцевич Β.Α., Кошевой А.А. Элезавад, виникає різке погіршення точності вхідних ктронные системы отображения навигационных даних при виконанні управління з диспетчерського карт. -2-е издание, переработанное и дополненпункту 5. ное. Одесса: ОГМА, 2000г. -110с.] для роботи у В будь-яких непередбачених випадках виявник складі інформаційно-управляючих систем з викотривожної ситуації 17 активізує усі інформаційні ристанням протоколів TCP/IP (Transmission Control ресурси саме центрального пункту 5 і тих контроProtocol / Internet Protocol). Для передачі даних на льних та опорних станцій 2, що забезпечують підблоки 17, 18, 21 сервер використовує протоколи вищення точності визначення координат рухомих HTTP (Hyper Text Transfer Protocol) і FTP (File об'єктів 4, які відносяться до просторово-часового Transfer Protocol). Локальна мережа інформації по вікна ситуаційної задачі, що визначив форобчислювальній підсистемі центрального пункту за мувач 18. допомогою приладу зв'язку 22 та окремої лінії зв'яЗа рахунок цілеспрямованої роботи блока газку б забезпечує усі режими роботи по стандарту рантування точності вхідних даних 19, що потрібні ADSL (Asymmetrical Digital Subscriber Line), вклюблока розв'язку ситуаційної задачі управління 20 у чаючи двосторонній доступ до Web і FTP серверів поточній тривожній ситуації, блок уточнення геота систему електронної пошти. Коригуюча інформетричних та кінематичних параметрів 21 реалізує мація надається у форматі RTCM та використовупроцедури оптимального послідовного оцінювання ється за схемами взаємодії згідно протоколу TCP. невизначених параметрів супроводжуваного рухоОператор центрального пункту може сформувати мого об'єкта 4 шляхом формування ситуаційно запит на режим RTK або звичайний диференційвизначеного графу, кількість точно визначених ний режим з вибором сервера, який найближче вершин якого дорівнює або перевищує кількість знаходиться до центральної станції і забезпечує невизначених параметрів, що необхідні для гараноперативний зв'язок з корисними (необхідними) тування заданого рівня точності [див. Бєляєвський коригуючими станціями 2, які ситуаційно наближеЛ.С. Обработка и отображение радионавигационні до вікна задачі управління рухомими об'єктами, ной информации. - Μ.: Радиосвязь, 1990. -61-71с.]. де виникла тривожна ситуація. Передача вимірів з 9 75709 10 частотою 1Гц від контрольних станцій можлива безпечить перехід тривожної ситуації у ситуацію, через TCP сервер за адресою що регламентно-сприятлива, в якій виявник триftp:\\sideshow.gpl.nasa.gov\pub\rjm\jplG\GPS з виковожної ситуації 17 не активізує роботу блоків 18, ристанням програми Real-Time Net Transfer 19, 20, 21. (RTNT) та протоколу User Datagram Protocol Блок гарантування точності вхідних даних 19 (UDP). Кожне коригуюче повідомлення має 560 біт. працює у двох режимах. Як багатоканальний приВиявник тривожної ситуації 17 реалізовано як лад передпускового контролю він використовує багатоканальний прилад допустового контролю m результати оцінок точності координат рухомих параметрів, що характеризують технічний стан об'єктів, які повинні відповідати граничним значенрухомих об'єктів на заданому часовому інтервалі ням допуску за точністю. У цьому режимі він реаліта у визначений на електронній карті зоні місцеззує майже аналогічні функції блока 17. Але у друнаходження. Якщо є порушення у вигляді виходу гому режимі, коли виявлено відхилення, тобто контрольованого параметру за нижню (Umin) або порушення (погіршення) точності координат контвехню (Umax) межі допуску, тоді формується сигрольованого рухомого об'єкта блок 19 забезпечує нал тривожної ситуації з наданням інформації про зміну законів узгодження вхідних і вихідних сигнаіндивідуальний код (номер) контрольованого палів у дискретному просторі шляхом багатоканальраметру визначеного рухомого об'єкта. ної генерації послідовностей даних для тих кроків, Реалізація блока 17 можлива, наприклад, згідколи супроводжуваний рухомий об'єкт 4 за будьно технічного рішення [див. А.С. №840819 від яких причин надає на центральний пункт 5 недо23.06.81, Бюл. №23]. стовірні координати, що не задовольняють логіці Формувач просторово-часового вікна зони сиконтрольованої ситуації. У цих випадках блок 19 туаційної задачі 18 для кожного з N рухомих об'єкздійснює багатоканальну генерацію чисел за формулою тів, що знаходяться на заданій Lmax відстані від Ykj A j Yk 1j , об'єкту, який ініціював видачу сигналу виявником тривожної ситуації 17, працює на умові апроксимації рухів усіх об'єктів, що знаходяться у зоні вікна, у вигляді експоненціальних процесів. Проводимо прогноз часу досягнення контрольованим параметром заданого значення передаварійної межі. Рахуємо мінімальне та максимальне значення показника експоненціальної функції i, Yi Ai exp t , яка на інтервалі апроксимує зміну i параметра Yi у дискретному просторі розрахунку кроком h нових динамічно змінюваних параметрів, що контролюються у вікні на час t Ti max Lmax , Vmax де: Vmax максимальне значення швидкості руху і-го об'єкта, швидкість, якого перевищує швидкості інших рухомих об'єктів, що у межах вікна зони ситуаційної задачі. Розрахунок показника експоненціальної функції такої, що збільшується або зменшується з вільно встановленим усталеним значенням, проводимо за технічним рішенням [див. А.С. №133590А1 від 07.09.87. Бюл. №33]. Тоді розрахунок прогнозу часу для групи з m перехідних процесів здійснюємо [див. А.С. 1500997А1 від 15.08.89. Бюл. №30]. Завдяки своєчасному визначенню уточнених динамічних параметрів контрольованих об'єктів формувач вікна зони ситуаційної задачі 18 надає значення прогнозного часу та геометричних координат прямокутника зони на електронній карті для роботи блоків 19, 20, 21. Таким чином, незалежно від закону руху контрольованого об'єкта він буде знаходитись у вікні зони ситуаційної задачі до тих пір, поки блок розв'язання ситуаційної задачі управління 20 не за де k - номер кроку для якого потрібно знати точні параметри j-ϊ координати об'єкта, що рухається відповідно функції F(x), для якої розраховуємо параметр Aj. Дана функція блока 19 реалізується згідно технічного рішення [див. А.С. №1067490 від 15.01.84. Бюл. №2] для тих рухомих об'єктів, координати яких тимчасово неможливо визначати відповідно датчика 8. Блок уточнення геометричних та кінематичних параметрів 21 здійснює формування системи алгебраїчних рівнянь з відомими точними коефіцієнтами та параметрами, що надають блок 19 та база даних електронних карт 16, яка селективне, з урахуванням зони ситуаційної задачі (відповідно блока 18), визначає наявні точні дані про опорні точки і базові точні напрями головних ділянок доріг, що геодезичне привязані під час їх будівництва або обслуговування. Таким чином, визначення невідомих або тих параметрів, що уточнюються, здійснюється шляхом використання стандартних програм рішення системи алгебраїчних рівнянь, наприклад, з бібліотеки Matlab або MathCAD. Кількість невідомих параметрів в усіх випадках менша або дорівнює кількості точно визначених параметрів об'єктів, що обрані у вікні зони ситуаційної задачі, яка динамічно змінюється у часі та відповідно руху N-го супроводжуваного об'єкту 4 у просторі, але у межах, що відображені на електронній карті. Проведений аналіз відомих технічних рішень у даній галузі техніки показав, що сукупність ознак, яка відрізняє винахід від прототипу, має істотні відмінності. 11 Комп’ютерна верстка Н. Лисенко 75709 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSupervisory control system for mobile objects using signals of the global satellite radio navigation system
Автори англійськоюBaranov Heorhii Leonidovych, Beliaevskyi Leonid Stepanovych, Dmytrychenko Mykola Fedorovych, Kondratiuk Vasyl Mykhailovych
Назва патенту російськоюСистема диспетчерского управления подвижными объектами с использованием сигналов глобальной спутниковой системы радионавигации
Автори російськоюБаранов Георгий Леонидович, Беляевский Леонид Степанович, Дмитриченко Николай Федорович, Кондратюк Василий Михайлович
МПК / Мітки
МПК: G01S 5/14
Мітки: глобальної, диспетчерського, система, радіонавігації, системі, керування, використанням, супутникової, сигналів, об'єктами, рухомими
Код посилання
<a href="https://ua.patents.su/6-75709-sistema-dispetcherskogo-keruvannya-rukhomimi-obehktami-z-vikoristannyam-signaliv-globalno-suputnikovo-sistemi-radionavigaci.html" target="_blank" rel="follow" title="База патентів України">Система диспетчерського керування рухомими об’єктами з використанням сигналів глобальної супутникової системи радіонавігації</a>
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 8150
Опубліковано: 15.07.2005
Автори: Копитко Ігор Йосипович, Авдєєнко Гліб Леонідович, Саричев Юрій Олексійович, Жукова Маргарита Василівна, Якорнов Євгеній Аркадійович
МПК: G01S 5/14
Мітки: об'єктів, рухомих, супроводження, використанням, сигналів, системі, глобальної, система, супутникової, радіонавігації
Формула / Реферат:
Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить центральний пост у складі робочої станції з двома приймально-передавальними антенами, що складається з каскадно з'єднаних приймача з датчиком команд і пристрою обробки, перший вихід якого з'єднаний з першим входом приймача з датчиком команд, блока управління, вхід якого з'єднаний з першим виходом робочої станції, який є другим...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 63867
Опубліковано: 15.01.2004
Автори: Левшенко Олександр Семенович, Копитко Ігор Йосипович, Ільченко Михайло Юхимович, Якорнов Євгеній Аркадійович, Рогов Петро Дмитрович
МПК: G01S 5/14
Мітки: радіонавігації, система, системі, супроводження, об'єктів, сигналів, використанням, супутникової, глобальної, рухомих
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням глобальної супутникової системи радіонавігації, що містить супроводжуваний рухомий об'єкт з GPS-датчиком, що приймає й обробляє сигнали штучних супутників Землі глобальної супутникової системи радіонавігації, які попадають у ширококутову діаграму направленості його антени, радіомодемом, вхід якого зв'язаний з виходом GPS-датчика, лінії зв'язку, на які надходять сигнали з виходу...
Система для супроводження рухомих об’єктів з використанням сигналів глобальної супутникової системи радіонавігації
Номер патенту: 57534
Опубліковано: 16.06.2003
Автори: Рогов Петро Дмитрович, Саричев Юрій Олексійович, Копитко Ігор Йосипович, Вдовіченко Наталія Євгенівна, Федоров Володимир Іванович, Якорнов Євгеній Аркадійович
МПК: G01S 5/14
Мітки: супроводження, системі, радіонавігації, система, сигналів, супутникової, рухомих, об'єктів, використанням, глобальної
Формула / Реферат:
1. Система для супроводження рухомих об'єктів з використанням сигналів глобальної супутникової системи радіонавігації, що містить перший супроводжуваний рухомий об'єкт з радіомодемом, на другий вхід якого через лінії зв'язку надходять сигнали з центрального пункту, і датчиком, вихід якого є першим входом радіомодема, а на вхід датчика надходять сигнали від штучних супутників землі глобальної супутникової системи, центральний пункт у складі...
Центральна станція системи радіозв’язку з рухомими об’єктами
Номер патенту: 44130
Опубліковано: 15.01.2002
Автор: Білоусов Дмитро Олександрович
МПК: H04B 7/26
Мітки: станція, рухомими, об'єктами, центральна, системі, радіозв'язку
Формула / Реферат:
Центральна станція системи радіозв'язку з рухомими об'єктами, яка містить приймач, блок керування, блок пам'яті і з'єднані послідовно блок формування сигналу вмикання передавача та передавач, яка відрізняється тим, що введені блок замикання шлейфа, аналого-цифровий і цифро-аналоговий перетворювачі, комутатор ліній, детектор викличного сигналу, блок диференціальної розв'язки, перший і другий буферні підсилювачі, причому перший, другий, третій,...
Система та спосіб управління потужністю глобальної багатосупутникової системи
Номер патенту: 26214
Опубліковано: 19.07.1999
Автори: Петерсон Кеннет Мейнард, Бертіджер Барі Роберт, Леопольд Реймонд Джозеф
МПК: H04B 7/185
Мітки: глобальної, потужністю, система, управління, системі, спосіб, багатосупутникової
Формула / Реферат:
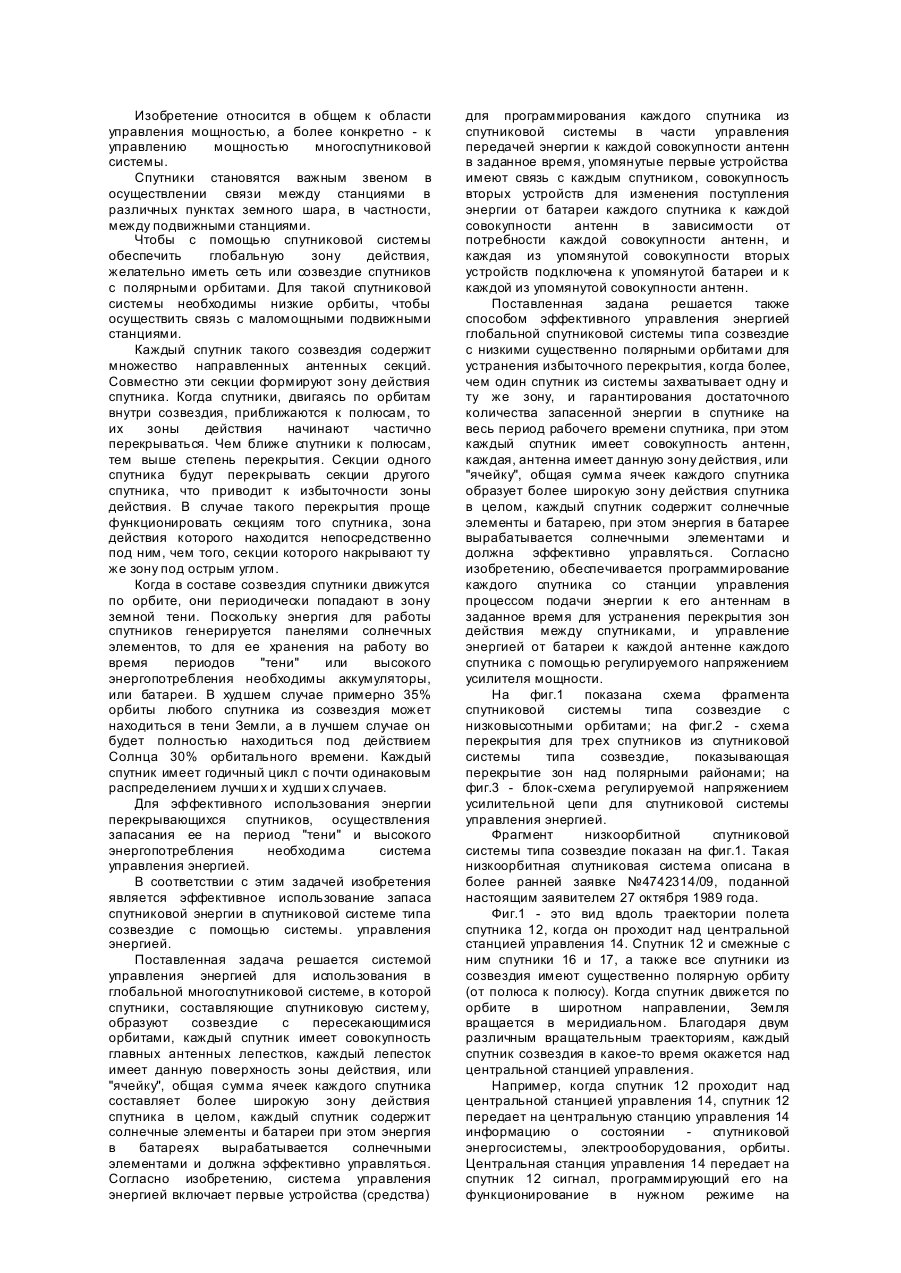
1, Система, управления мощностью глобальной многоспутниковой системы, в которой входящие в нее спутники образуют созвездие с пересекающимися орбитами, причем каждый спутник содержит множество антенн, проецирующих множество лепестков диаграмм направленности на земную поверхность, причем каждый лепесток имеет первую зону обслуживания на земной поверхности, или "ячейку", причем сумма ячеек для каждого спутника образует вторую зону...
Попередній патент: Пристрій для керування трифазним двигуном змінного струму
Наступний патент: Багатоканальний ондуляторний індукційний прискорювач
Випадковий патент: Спосіб одержання складних ефірів 1,1-діоксі пеніціланової кислоти