Кантувач з підйомними центрами
Номер патенту: 56506
Опубліковано: 10.01.2011
Автори: В'юнник Микола Васильович, Моторін Артур Миколайович, Малюсейко Віктор Миронович
Формула / Реферат
1. Кантувач з підйомними центрами, що складається здвох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу, при цьому стійки виконані з вертикальними напрямними, каретка виконана з роликами для переміщення уздовж згаданих напрямних, а каретка однієї з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом, який відрізняється тим, що одна з опор виконана з можливістю подовжнього переміщення щодо іншої опори, а привід механізму підйому кінематично з'єднаний з кареткою за допомогою вантажних гвинтів, верхні кінці яких з'єднані з вихідними валами згаданого приводу, а нижні закріплені на основах стійок, і взаємодіючих з вантажними гвинтами гайок, закріплених на каретці.
2. Кантувач за п. 1, який відрізняється тим, що згадана опора виконана з можливістю подовжнього переміщення щодо іншої опори за допомогою лебідки, що включає привід і систему блоків для напрямлення і натягнення троса, з'єднаного з опорою, і роликів, змонтованих на опорі за допомогою двоплечих важелів, шарнірно закріплених в нижніх частинах стійок, при цьому на одному плечі двоплечих важелів змонтовані згадані ролики, а друге плече виконано з можливістю взаємодії з гідравлічними домкратами, закріпленими на згаданих стійках.
3. Кантувач за п. 2, який відрізняється тим, що каретка згаданої опори містить механізм осьового переміщення вантажоносійного елемента, що складається з двох пневматичних циліндрів, закріплених на каретці симетрично щодо подовжньої осі вантажоносійного елемента, при цьому штоки пневматичних циліндрів з'єднані з валом вантажоносійного елемента за допомогою кронштейна і забезпечені фіксатором положення штоків при висунутому вантажоносійному елементі.
4. Кантувач за п. 1, який відрізняється тим, що привід механізму підйому виконаний у вигляді мотор-редуктора і з'єднаних з ним двох конічних редукторів, вали яких з'єднані з верхніми кінцями вантажних гвинтів, при цьому вантажні гвинти і гайки виконані у вигляді гвинтових передач з трапецеїдальною різьбою або кулько-гвинтових передач, а механізм повороту виконаний у вигляді мотор-редуктора, вал якого з'єднаний з валом вантажоносійного елемента, при цьому мотор-редуктор закріплений на каретці з протилежної сторони від центру для кріплення виробу і із зміщенням щодо подовжньої осі вала вантажоносійного елемента.
5. Кантувач за п. 1, який відрізняється тим, що центри вантажоносійних елементів виконані з можливістю кріплення виробів безпосередньо або за допомогою змінних технологічних елементів або знімної опорної рами, при цьому для кріплення виробів безпосередньо згадані центри виконані з можливістю розміщення і фіксації їх усередині установних отворів в торцевих частинах виробів або з можливістю охоплення і фіксації сполучуваних частин виробу зовні, змінні технологічні елементи виконані з можливістю з'єднання з центрами і із сполучуваними частинами виробів, а знімна опорна рама виконана з можливістю з'єднання з центрами і містить базуючі і притискні елементи для кріплення виробу.
Текст
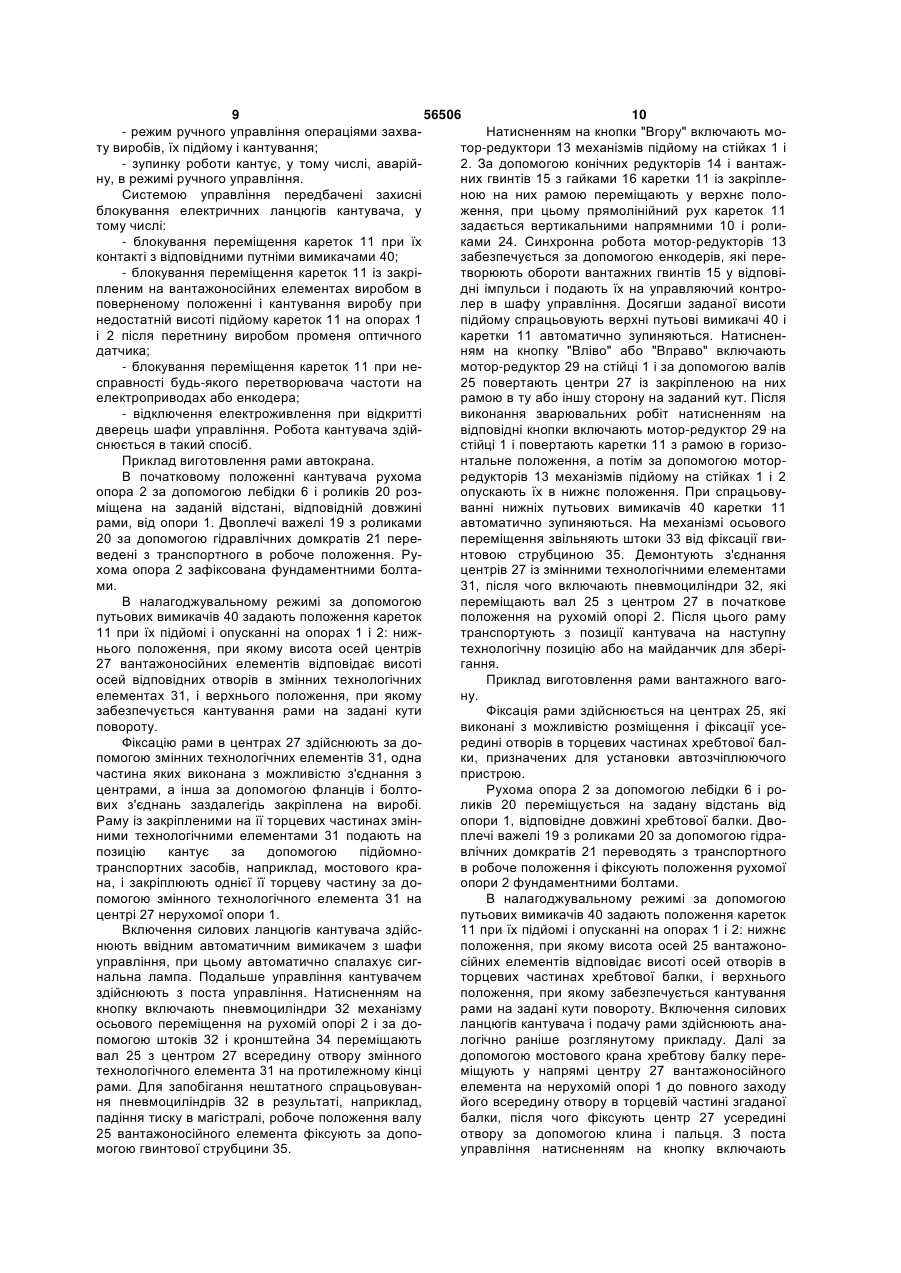
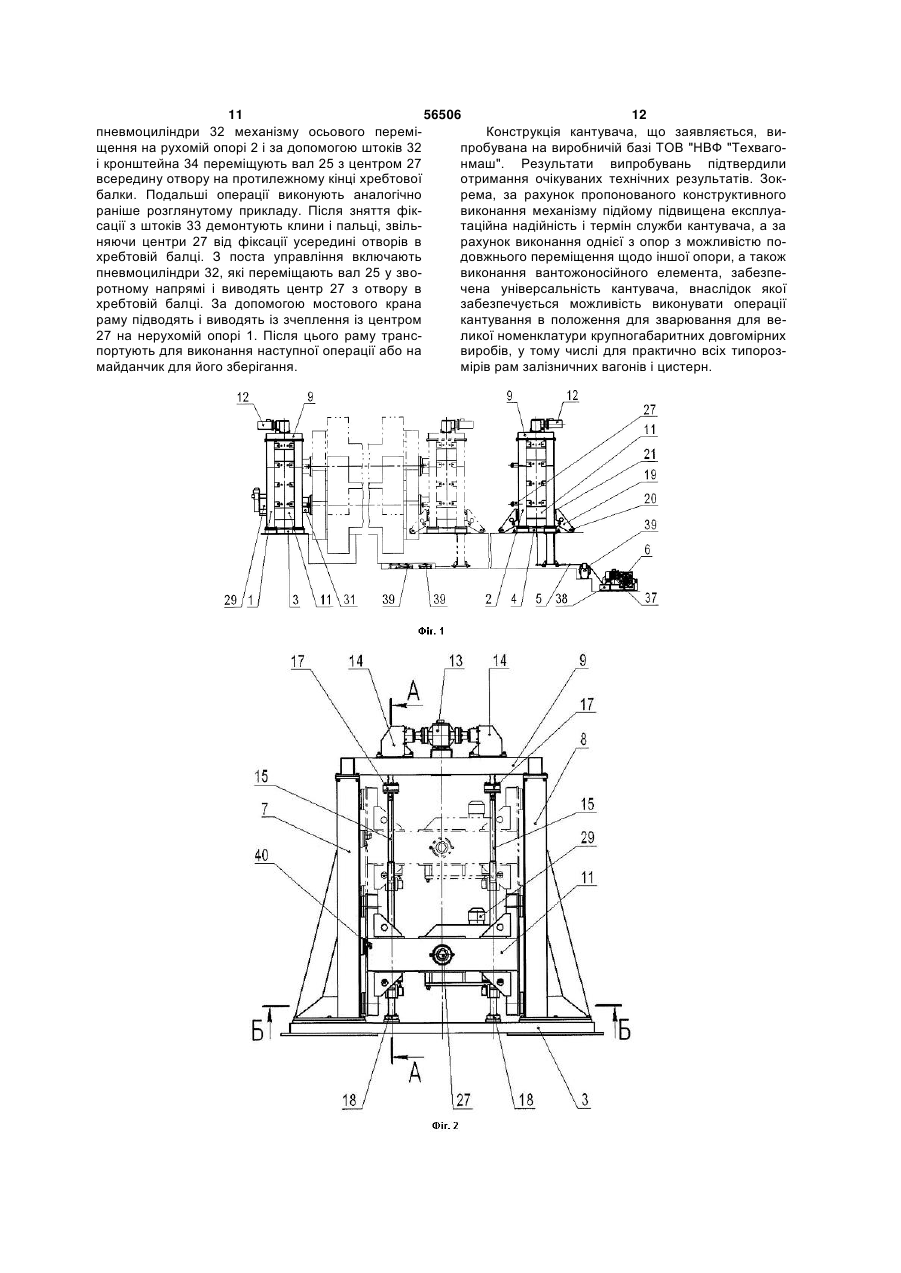
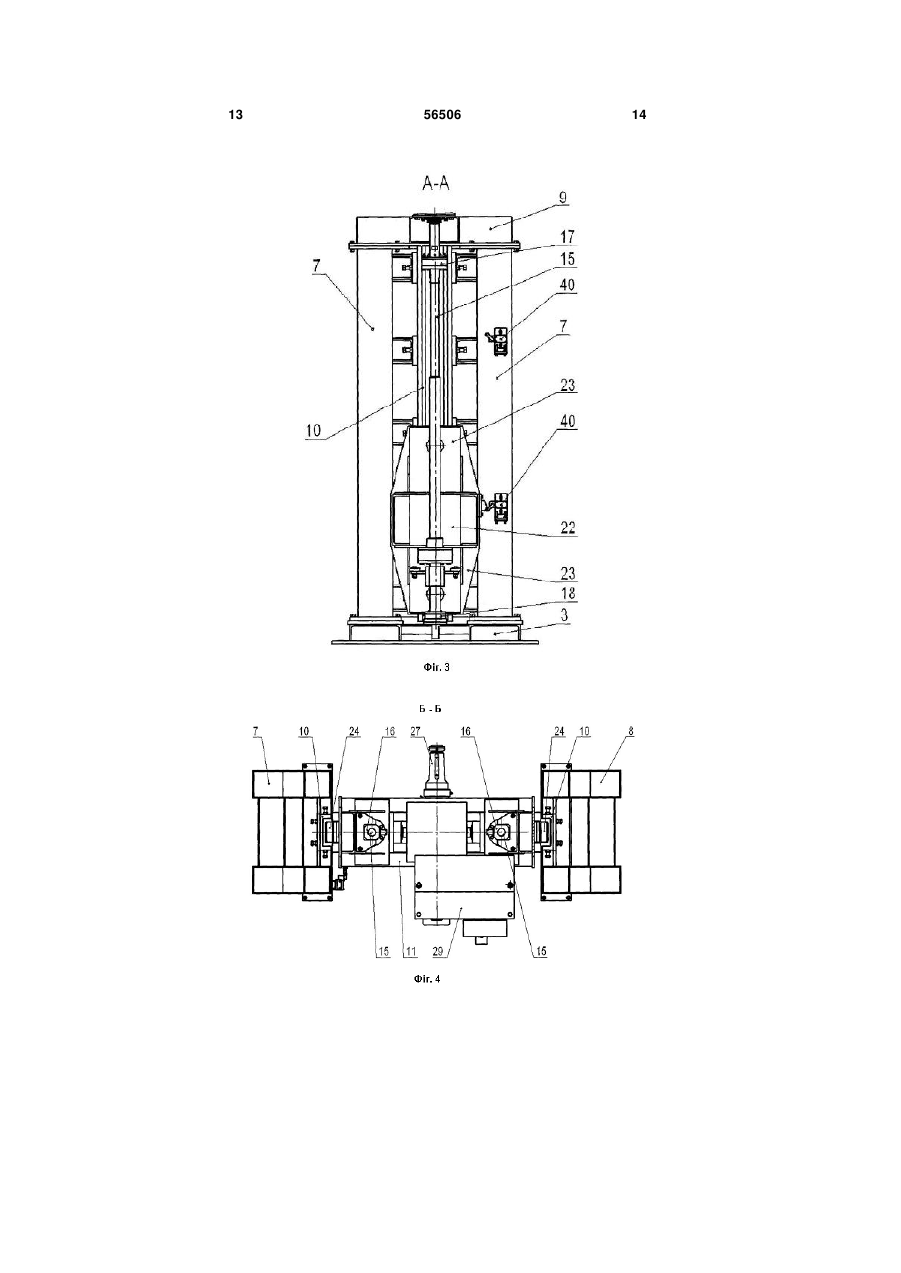
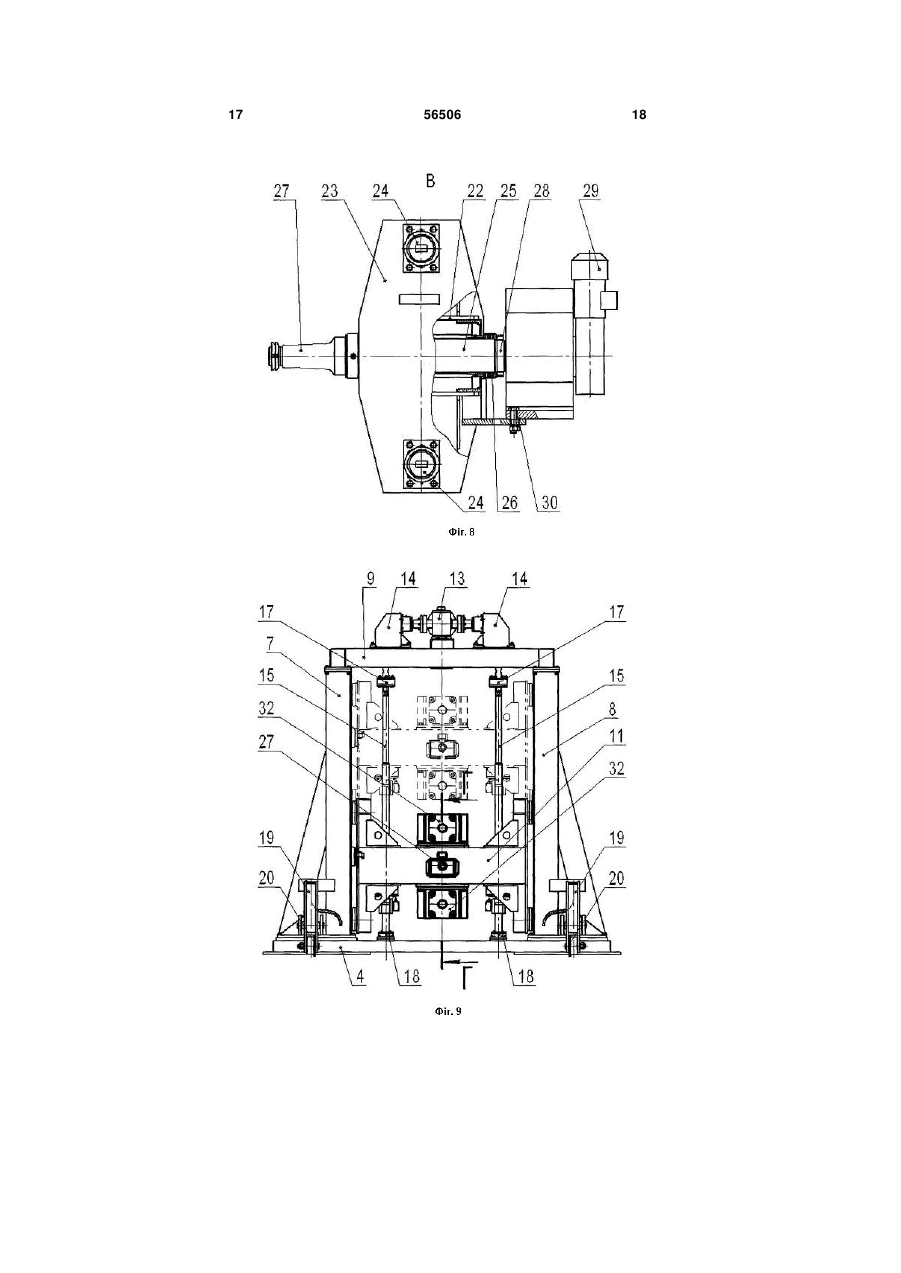
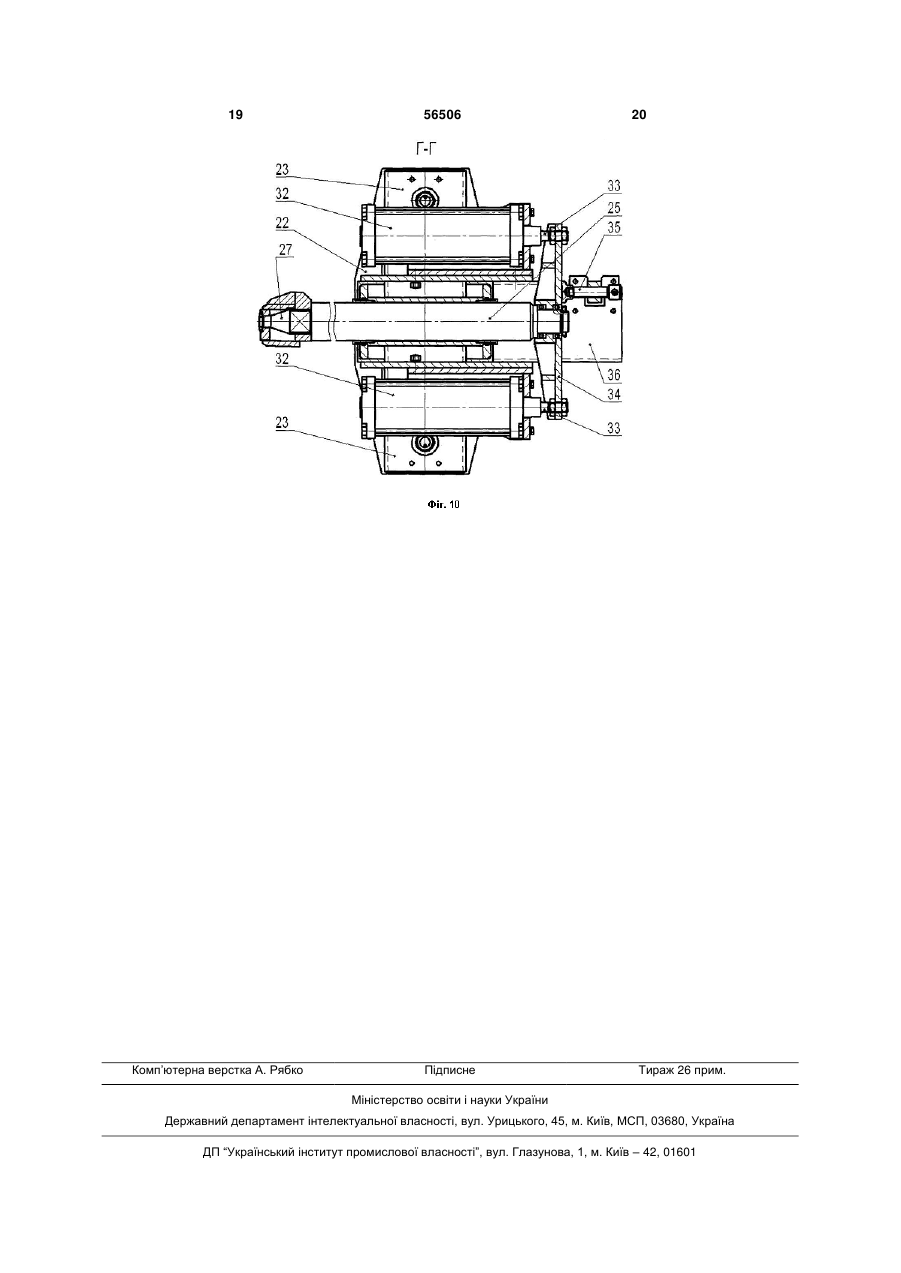
1. Кантувач з підйомними центрами, що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу, при цьому стійки виконані з вертикальними напрямними, каретка виконана з роликами для переміщення уздовж згаданих напрямних, а каретка однієї з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом, який відрізняється тим, що одна з опор виконана з можливістю подовжнього переміщення щодо іншої опори, а привід механізму підйому кінематично з'єднаний з кареткою за допомогою вантажних гвинтів, верхні кінці яких з'єднані з вихідними валами згаданого приводу, а нижні закріплені на основах стійок, і взаємодіючих з вантажними гвинтами гайок, закріплених на каретці. 2. Кантувач за п. 1, який відрізняється тим, що згадана опора виконана з можливістю подовжнього переміщення щодо іншої опори за допомогою лебідки, що включає привід і систему блоків для напрямлення і натягнення троса, з'єднаного з опорою, і роликів, змонтованих на опорі за допомогою двоплечих важелів, шарнірно закріплених в нижніх частинах стійок, при цьому на одному плечі двоплечих важелів змонтовані згадані ролики, а друге 2 (19) 1 3 Корисна модель відноситься до пристроїв, для захвату, підйому і кантування виробів в положення для зварки, переважно при виготовленні довгомірних і великогабаритних виробів, наприклад, рам спеціальних і великовантажних автомобілів, залізничних вагонів і цистерн, і може бути використаний на машинобудівних і вагонобудівних підприємствах при виготовленні, модернізації і капітальному ремонті різних виробів такого типу. Відомий кантувач з підйомними центрами (див. а.с. СРСР №986691, МПК В23К37/04, дата публікації 07.01.1983p.), що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і виконана у вигляді двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу, при цьому каретка на одній з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом, стійки виконані з вертикальними напрямними, а каретка виконана з роликами для переміщення уздовж згаданих напрямних. Опори закріплені на заданій відстані одна щодо одної стаціонарно. Механізм підйому виконаний у вигляді двох ланцюгових передач, верхні і нижні вітки яких розташовані на зірочках, з’єднаних, відповідно, з приводом і з натягачем. Вільні кінці ланцюгових передач закріплені на каретці і на страхувальних важелях, виконаних з можливістю гальмування і фіксації положення кареток при обриві або ослабленні ланцюга. Привід механізму підйому складається з двигуна, муфти, гальма, редуктора і відкритої одноступінчатої зубчатої передачі, що складається з шестерні і колеса, на загальному валу з яким закріплена зірочка верхньої вітки ланцюгової передачі. Вісь згаданого валу орієнтована перпендикулярно до подовжньої осі вантажоносійного елемента. Механізм повороту виконаний у вигляді приводу і відкритої зубчатої передачі, з'єднаної з валом вантажоносійного елемента. Зворотно-поступальне переміщення вантажоносійного елемента здійснюється за допомогою механізму осьового переміщення, виконаного у вигляді пневмоциліндра, розташованого на каретці. Фіксація положення вантажоносійного елемента в його крайніх положеннях здійснюється за допомогою двоплечих важелів, одне плече яких виконано з можливістю взаємодії з валом вантажоносійного елемента, а друге плече містить копіювальний ролик, виконаний з можливістю взаємодії із закріпленими на стійках упорами. Управління кантувачем здійснюється з кнопкових пультів, закріплених на опорах. Кантувач призначений для захвату, підйому і кантування в положення для зварки рам залізничних вагонів. Недоліками відомого кантувача є: - використовування ланцюгової передачі в механізмі підйому кареток, що знижує надійність експлуатації і терміну служби; - стаціонарне розташування опор, що виключає переналагодження кантувача для виготовлен 56506 4 ня різних типорозмірів виробів і, відповідно, обмежує його технологічні можливості; - використовування механічних систем блокування механізмів підйому і осьового переміщення при нештатних ситуаціях, що ускладнює конструкцію кантує і знижує надійність його експлуатації. Відомий кантувач з підйомними центрами (см. Цыган Б.Г., Цыган А.Б. Вагоностроительные конструкции. Изготовление, модернизация, ремонт / Монография, под ред. Б.Г. Цыгана. - Кременчуг: Изд. "Кременчуг", 2005. - 751с. - 169-172с.), що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і виконана у вигляді двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу. Каретка на одній з опор містить механізм повороту, привід якого з'єднаний з вантажоносійного елементом. Стійки виконані з вертикальними напрямними, а каретка виконана з роликами для переміщення уздовж згаданих напрямних. Опори закріплені на заданій відстані одна щодо одної стаціонарно. Механізм підйому виконаний у вигляді двох ланцюгових передач, верхні і нижні вітки яких розташовані на зірочках, з'єднаних, відповідно, з приводами і з натягачами. Вільні кінці ланцюгових передач закріплені на каретці. Привід механізму підйому складається з черв'ячного мотор-тормоз-редуктора, циліндрового редуктора і відкритої одноступінчатої зубчатої передачі, що складається з шестерні і колеса, на загальному валу з яким закріплені зірочки. Вісь згаданого валу орієнтована уздовж подовжньої осі вантажоносійного елемента. Механізм повороту виконаний у вигляді приводу, що складається з планетарного мотор-редуктора і відкритої двохступінчастої зубчатої передачі, з'єднаної з валом вантажоносійного елемента. Кутові положення вантажоносійного елемента контролюються кінцевими вимикачами. Центр для кріплення виробу виконаний з можливістю розміщення усередині отворів в торцевих частинах виробу. Поворотнопоступальне переміщення вантажоносійного елемента здійснюється за допомогою механізму осьового переміщення, виконаного у вигляді пневмоциліндра, розташованого на каретці. Для запобігання нештатного спрацьовування пневмоциліндра він забезпечений кульковим замком. Система управління виконана з можливістю автоматичного управління операціями по прийому виробів з візка конвеєра і їх підйому на задану висоту. Управління кантувачем здійснюється з пультів управління, розташованих біля кожної стійки. Система управління містить електричні блокування, що виключають одночасне включення двох пультів управління, а також переміщення кареток із закріпленим на вантажоносійних елементах виробом в поверненому положенні і повороту виробу, що виключають при недостатній висоті підйому кареток на опорах. Кантувач призначений для за 5 56506 6 хвату, підйому і кантування в положення для зварним двох конічних редукторів, вали яких з'єднані з ки рам залізничних вагонів. верхніми кінцями вантажних гвинтів, при цьому Недоліками відомого кантувача є: вантажні гвинти і гайки виконані у вигляді гвинто- використовування ланцюгової передачі в мевих передач з трапецеїдальним різьбленням або ханізмі підйому кареток, що знижує надійність екскулько-гвинтових передач, а механізм повороту плуатації і термін служби; виконаний у вигляді мотор-редуктора, вал якого - стаціонарне розташування опор, що виклюз'єднаний з валом вантажоносійного елемента, чає переналагодження кантувача для виготовленпри цьому мотор-редуктор був закріплений на каня інших типорозмірів виробів і, відповідно, обмеретці з протилежної сторони від центру для кріпжує його технологічні можливості. лення виробу і із зміщенням щодо подовжньої осі В основу корисної моделі поставлена задача валу вантажоносійного елемента. створення такого кантувача з підйомними центраЦентри вантажоносійних елементів виконані з ми, в якому за рахунок іншого конструктивного можливістю кріплення виробів безпосередньо або виконання механізму підйому кареток і іншого його за допомогою змінних технологічних елементів взаємозв'язку з каретками, а також іншого викоабо знімної опорної рами, при цьому для кріплення нання одній з опор кантувача забезпечується підвиробів безпосередньо згадані центри виконані з вищення надійності його експлуатації і терміну можливістю розміщення і фіксації їх усередині служби при одночасному розширенні технологічустановних отворів в торцевих частинах виробів них можливостей. або з можливістю охоплення і фіксації сполучаєПоставлена задача вирішується тим, що канмих частин виробу зовні, змінні технологічні елетувач з підйомними центрами, що складається з менти виконані з можливістю з'єднання з центрами двох дзеркально розташованих на заданій відстані і із сполучаємими частинами виробів, а знімна одна щодо одної опор, кожна з яких закріплена на опорна рама виконана з можливістю з'єднання з основі і складається з двох стійок, з'єднаних у верцентрами і містить базуючі і притискні елементи хній частині горизонтальною балкою, каретки, видля кріплення виробу. конаної з можливістю переміщення уздовж стійок, Використовування вантажних гвинтів і взаємомеханізму підйому, привід якого закріплений на діючих з ними гайок в кінематичному з'єднанні горизонтальній балці і кінематично з'єднаний з приводу механізму підйому з кареткою дозволяє кареткою, і змонтованого на каретці вантажоносійпідвищити надійність кантувача при експлуатації в ного елемента з центром для кріплення виробу, порівнянні з ланцюговою схемою їх з'єднання. Випри цьому стійки виконані з вертикальними напряконання однієї з опор з можливістю подовжнього мними, каретка виконана з роликами для переміпереміщення щодо іншої опори дозволяє виконущення уздовж згаданих напрямних, а каретка одвати переналагодження кантує при виготовленні нієї з опор містить механізм повороту, привід якого різних типорозмірів виробів, що розширює його з'єднаний з вантажоносійним елементом, згідно технологічні можливості. Таким чином, сукупність корисної моделі одна з опор виконана з можливісзагальних і відрізнювальних істотних ознак користю подовжнього переміщення щодо іншої опори, а ної моделі, що заявляється, дозволяє підвищити привід механізму підйому кінематично з'єднаний з надійність кантувача при експлуатації при одночакареткою за допомогою вантажних гвинтів, верхні сному розширенні його технологічних можливоскінці яких з'єднані з вихідними валами згаданого тей. Виконання підйомних центрів пропонованої приводу, а нижні закріплені на основах стійок, і конструкції дозволяє значно розширити область взаємодіючих з вантажними гвинтами гайок, закрізастосування кантувача унаслідок забезпечення плених на каретці. кріплення і кантування широкої номенклатури виЗгадана опора виконана з можливістю поробів з різними типорозмірами. довжнього переміщення щодо іншої опори за доКонструкція кантувача з підйомними центрами, помогою лебідки, що включає привід і систему що заявляється, пояснюється на прикладах його блоків для напряму і натягнення троса, з'єднаного виконання, розроблених Товариством з обмежез опорою, і роликів, змонтованих на опорі за допоною відповідальністю "НВФ "Техвагонмаш", могою двоплечих важелів, шарнірно закріплених в м.Кременчук, Україна. нижніх частинах стійок, при цьому на одному плечі Сутність корисної моделі пояснюється преддвоплечих важелів змонтовані згадані ролики, а ставленими фігурами креслень, де на Фіг.1 - загадруге плече виконано з можливістю взаємодії з льний вид кантувача, вид спереду; на Фіг.2 - загагідравлічними домкратами, закріпленими на згальний вид кантувача, вид збоку; на Фіг.3 - переріз даних стійках. А-А на Фіг.2 (установка ходового гвинта механізму Доцільно, щоб каретка згаданої опори містила підйому); на Фіг.4 - переріз Б-Б на Фіг.2 (установка механізм осьового переміщення вантажоносійного каретки з механізмом повороту на опорах); на елемента, що складається з двох пневматичних Фіг.5 - опора нерухома, вид збоку; на Фіг.6 - опора циліндрів, закріплених на каретці симетрично щорухома, вид збоку; на Фіг.7 - каретка, вид спереду; до подовжньої осі вантажоносійного елемента, при на Фіг.8 - вид В на Фіг.7 (каретка, вид збоку); на цьому штоки пневматичних циліндрів були з'єднані Фіг.9 - приклад виконання опори рухомої з механіз валом вантажоносійного елемента за допомогою змом осьового переміщення вантажоносійного кронштейна і забезпечені фіксатором положення елемента, вид збоку; на Фіг.10 - переріз Г-Г на штоків при висунутому вантажоносійному елеменФіг.2 (механізм осьового переміщення вантажоноті. сійного елемента). Доцільно, щоб привід механізму підйому був Кантувач з підйомними центрами складається виконаний у вигляді мотор-редуктора і з'єднаних з (Фіг.1-6) з двох дзеркально розташованих на зада 7 56506 8 ній відстані одна щодо одної нерухомої 1 і рухомої можуть закріплюватися на виробі до подачі його 2 опор, кожна з яких закріплена на основах, відпона позицію кантувача (виріб монтується на опорній відно, 3 і 4. Основа 4 рухомої опори 2 за допоморамі за допомогою базуючих і притискних елеменгою троса 5 з'єднана з лебідкою 6 для переміщентів). ня щодо опори 1. Задане розташування рухомої Конструкція каретки 11, розміщеної на рухомій опори 2 щодо нерухомої опори 1 фіксується за опорі 2, відрізняється від каретки 11 на нерухомій допомогою фундаментних болтів (не позначені). опорі 2 тим, що вона виконана (Фіг.9, 10) без меОпори 1 і 2 складаються з двох стійок 7 і 8 коханізм повороту вантажоносійного елемента, але робчастої конструкції, з'єднаних у верхній частині містить механізм осьового переміщення вантажогоризонтальною балкою 9 рамної конструкції. Узносійного елемента, який складається з двох пнедовж стійок 7 і 8 закріплені вертикальні напрямні вмоциліндрів 32, закріплених на верхній і нижній 10 для переміщення кареток 11. На горизонтальній поверхнях каретки 11 симетрично щодо подовжбалці 9 закріплений привід 12 механізму підйому, ньої осі валу 25. Штоки 33 пневмоциліндрів 32 що складається з мотор-редуктора 13 і з'єднаних з з'єднані з валом 25 за допомогою кронштейна 34. ним двох конічних редукторів 14. Приводи 12 на Робоче (висунуте) положення валу 25 вантажоноопорах 1 і 2 кінематично з'єднані з відповідними сійного елемента додатково фіксується за допомокаретками 11 за допомогою вантажних гвинтів 15 і гою гвинтової струбцин 35, закріпленої на кронгайок 16. Верхні кінці вантажних гвинтів 15 за доштейні 36 з можливістю взаємодії із згаданим помогою муфт 17 з'єднані з вихідними валами (не кронштейном 34. позначені) конічних редукторів 14, а нижні кінці Лебідка 6 містить (Фіг.1) привід 37, закріплений закріплені в опорних підшипниках 18 на основах 3 і на рамі 38, і систему блоків 39 для напряму і натя4. Гайки 16 закріплені на каретках 11. Гвинтова гнення троса 5. Залежно від конструктивного викопередача між вантажними гвинтами 15 і гайками нання і розмірів виробів переміщення рухомої 16 може бути виконана у вигляді трапецеїдального опори 2 на нову позицію може здійснюватися тарізьблення або у вигляді кулько-гвинтової передачі кож за допомогою мостового крана і фіксації осно(не показана). ви 4 затискними елементами або знімними фунНа рухомій опорі 2 в нижніх частинах стійок 7 і даментними болтами (не показані). В цьому 8 шарнірно закріплені двоплечі важелі 19, на одвипадку рухома опора 2 виконується без двопленому плечі яких змонтовані ролики 20, а другі плечих важелів 19, роликів 20 і гідравлічних домкратів чі виконані з можливістю взаємодії з гідравлічними 21. домкратами 21, закріпленими на стійках 7 і 8. Управління кантувача здійснюється за допоКаретка 11 на нерухомій опорі 1 виконана могою системи управління, побудованої на базі (Фіг.4, 7, 8) у вигляді каркаса 22 з жорстко закріпуправляючого контролера. Об'єктами управління леними на його протилежних торцевих частинах являються мотор-редуктори 13 механізмів підйому вертикальними кронштейнами 23, на кожному з на опорах 1 і 2, мотор-редуктор 29 механізму пояких змонтовано по два ролики 24 для переміщенвороту на опорі 1, пневмоциліндри 32 механізму ня уздовж вертикальних напрямних 10. Вантажоосьового переміщення вантажоносійного елемента носійний елемент складається з валу 25, закріплеі гідравлічні домкрати 21 на опорі 2, а також привід ного всередині каркаса 22 на підшипникових 37 лебідки 6. Для управління вказаними об'єктами опорах 26, і центру 27 для кріплення виробу, викона стійках 7 і 8 закріплені путьові вимикачі 40 для наного на вільному кінці валу 25. Протилежний зупинки кареток 11 при їх підйомі і опусканні на кінець валу 25 за допомогою гайки 28 з'єднаний з заданій висоті, енкодери (не показані) для синхровихідним валом (не позначений) механізму повонізації кутів повороту вантажоносійних елементів роту, виконаного у вигляді мотор-редуктора 29, на опорах 1 і 2, а також оптичні датчики (не показакріпленого за допомогою кронштейна 30 на карзані) для запобігання переміщення кареток 11 із касі 22 з протилежної сторони від центру 27 і із закріпленим на вантажоносійних елементах вирозміщенням щодо його подовжньої осі. бом в поверненому положенні і кантування виробу Залежно від конструктивного виконання і розпри недостатній висоті підйому кареток 11 на опомірів виробів центри 27 вантажоносійних елеменрах 1 і 2. тів можуть бути виконані як з можливістю кріпленУправління роботою кантувача здійснюється з ня виробівбезпосередньо, так і кріплення за шафи управління і кнопкового поста управління допомогою змінних технологічних елементів 31 (не показані). Шафа управління змонтована побабо знімної опорної рами (не показана), закріплелизу кантувача і містить пускову апаратуру з світних на центрах 27 за допомогою, наприклад, флалосигнальними лампами, кнопкову панель, управнцевих з'єднань. Для кріплення виробів безпоселяючий контролер і органи захисту і сигналізації редньо згадані центри 27 можуть бути виконаний з (не показані). Пост управління розміщений біля можливістю розміщення і фіксації їх усередині однієї з опор і взаємозв'язані з шафою управління. отворів в торцевих частинах виробів або з можлиПости управління містять кнопкові панелі І світловістю охоплення і фіксації сполучаємих частин ву сигналізацію (не показані). Система управління виробів зовні. Змінні технологічні елементи 31 випідключена до трифазної мережі електроживлення конані з можливістю з'єднання з центрами 27 і з напругою 380В і частотою 50Гц. сполучаємими частинами виробів. Знімна опорна Система управління забезпечує: рама виконана з базуючими і притискними елеме- включення електричних силових ланцюгів нтами для установки і фіксації сполучаємих частин кантувача; виробу зовні або зсередини (не показані). Змінні - наладку в режимі ручного управління полотехнологічні елементи 31 або знімна опорна рама жень кареток 11 при їх підйомі і опусканні; 9 56506 10 - режим ручного управління операціями захваНатисненням на кнопки "Вгору" включають моту виробів, їх підйому і кантування; тор-редуктори 13 механізмів підйому на стійках 1 і - зупинку роботи кантує, у тому числі, аварій2. За допомогою конічних редукторів 14 і вантажну, в режимі ручного управління. них гвинтів 15 з гайками 16 каретки 11 із закріплеСистемою управління передбачені захисні ною на них рамою переміщають у верхнє полоблокування електричних ланцюгів кантувача, у ження, при цьому прямолінійний рух кареток 11 тому числі: задається вертикальними напрямними 10 і роли- блокування переміщення кареток 11 при їх ками 24. Синхронна робота мотор-редукторів 13 контакті з відповідними путніми вимикачами 40; забезпечується за допомогою енкодерів, які пере- блокування переміщення кареток 11 із закрітворюють обороти вантажних гвинтів 15 у відповіпленим на вантажоносійних елементах виробом в дні імпульси і подають їх на управляючий контроповерненому положенні і кантування виробу при лер в шафу управління. Досягши заданої висоти недостатній висоті підйому кареток 11 на опорах 1 підйому спрацьовують верхні путьові вимикачі 40 і і 2 після перетнину виробом променя оптичного каретки 11 автоматично зупиняються. Натиснендатчика; ням на кнопку "Вліво" або "Вправо" включають - блокування переміщення кареток 11 при немотор-редуктор 29 на стійці 1 і за допомогою валів справності будь-якого перетворювача частоти на 25 повертають центри 27 із закріпленою на них електроприводах або енкодера; рамою в ту або іншу сторону на заданий кут. Після - відключення електроживлення при відкритті виконання зварювальних робіт натисненням на дверець шафи управління. Робота кантувача здійвідповідні кнопки включають мотор-редуктор 29 на снюється в такий спосіб. стійці 1 і повертають каретки 11 з рамою в горизоПриклад виготовлення рами автокрана. нтальне положення, а потім за допомогою моторВ початковому положенні кантувача рухома редукторів 13 механізмів підйому на стійках 1 і 2 опора 2 за допомогою лебідки 6 і роликів 20 розопускають їх в нижнє положення. При спрацьовуміщена на заданій відстані, відповідній довжині ванні нижніх путьових вимикачів 40 каретки 11 рами, від опори 1. Двоплечі важелі 19 з роликами автоматично зупиняються. На механізмі осьового 20 за допомогою гідравлічних домкратів 21 перепереміщення звільняють штоки 33 від фіксації гвиведені з транспортного в робоче положення. Рунтовою струбциною 35. Демонтують з'єднання хома опора 2 зафіксована фундаментними болтацентрів 27 із змінними технологічними елементами ми. 31, після чого включають пневмоциліндри 32, які В налагоджувальному режимі за допомогою переміщають вал 25 з центром 27 в початкове путьових вимикачів 40 задають положення кареток положення на рухомій опорі 2. Після цього раму 11 при їх підйомі і опусканні на опорах 1 і 2: нижтранспортують з позиції кантувача на наступну нього положення, при якому висота осей центрів технологічну позицію або на майданчик для збері27 вантажоносійних елементів відповідає висоті гання. осей відповідних отворів в змінних технологічних Приклад виготовлення рами вантажного вагоелементах 31, і верхнього положення, при якому ну. забезпечується кантування рами на задані кути Фіксація рами здійснюється на центрах 25, які повороту. виконані з можливістю розміщення і фіксації усеФіксацію рами в центрах 27 здійснюють за доредині отворів в торцевих частинах хребтової балпомогою змінних технологічних елементів 31, одна ки, призначених для установки автозчіплюючого частина яких виконана з можливістю з'єднання з пристрою. центрами, а інша за допомогою фланців і болтоРухома опора 2 за допомогою лебідки 6 і рових з'єднань заздалегідь закріплена на виробі. ликів 20 переміщується на задану відстань від Раму із закріпленими на її торцевих частинах змінопори 1, відповідне довжині хребтової балки. Двоними технологічними елементами 31 подають на плечі важелі 19 з роликами 20 за допомогою гідрапозицію кантує за допомогою підйомновлічних домкратів 21 переводять з транспортного транспортних засобів, наприклад, мостового крав робоче положення і фіксують положення рухомої на, і закріплюють однієї її торцеву частину за доопори 2 фундаментними болтами. помогою змінного технологічного елемента 31 на В налагоджувальному режимі за допомогою центрі 27 нерухомої опори 1. путьових вимикачів 40 задають положення кареток Включення силових ланцюгів кантувача здійс11 при їх підйомі і опусканні на опорах 1 і 2: нижнє нюють ввідним автоматичним вимикачем з шафи положення, при якому висота осей 25 вантажоноуправління, при цьому автоматично спалахує сигсійних елементів відповідає висоті осей отворів в нальна лампа. Подальше управління кантувачем торцевих частинах хребтової балки, і верхнього здійснюють з поста управління. Натисненням на положення, при якому забезпечується кантування кнопку включають пневмоциліндри 32 механізму рами на задані кути повороту. Включення силових осьового переміщення на рухомій опорі 2 і за доланцюгів кантувача і подачу рами здійснюють анапомогою штоків 32 і кронштейна 34 переміщають логічно раніше розглянутому прикладу. Далі за вал 25 з центром 27 всередину отвору змінного допомогою мостового крана хребтову балку перетехнологічного елемента 31 на протилежному кінці міщують у напрямі центру 27 вантажоносійного рами. Для запобігання нештатного спрацьовуванелемента на нерухомій опорі 1 до повного заходу ня пневмоциліндрів 32 в результаті, наприклад, його всередину отвору в торцевій частині згаданої падіння тиску в магістралі, робоче положення валу балки, після чого фіксують центр 27 усередині 25 вантажоносійного елемента фіксують за допоотвору за допомогою клина і пальця. З поста могою гвинтової струбцини 35. управління натисненням на кнопку включають 11 56506 12 пневмоциліндри 32 механізму осьового переміКонструкція кантувача, що заявляється, вищення на рухомій опорі 2 і за допомогою штоків 32 пробувана на виробничій базі ТОВ "НВФ "Техвагоі кронштейна 34 переміщують вал 25 з центром 27 нмаш". Результати випробувань підтвердили всередину отвору на протилежному кінці хребтової отримання очікуваних технічних результатів. Зокбалки. Подальші операції виконують аналогічно рема, за рахунок пропонованого конструктивного раніше розглянутому прикладу. Після зняття фіквиконання механізму підйому підвищена експлуасації з штоків 33 демонтують клини і пальці, звільтаційна надійність і термін служби кантувача, а за няючи центри 27 від фіксації усередині отворів в рахунок виконання однієї з опор з можливістю похребтовій балці. З поста управління включають довжнього переміщення щодо іншої опори, а також пневмоциліндри 32, які переміщають вал 25 у звовиконання вантожоносійного елемента, забезперотному напрямі і виводять центр 27 з отвору в чена універсальність кантувача, внаслідок якої хребтовій балці. За допомогою мостового крана забезпечується можливість виконувати операції раму підводять і виводять із зчеплення із центром кантування в положення для зварювання для ве27 на нерухомій опорі 1. Після цього раму трансликої номенклатури крупногабаритних довгомірних портують для виконання наступної операції або на виробів, у тому числі для практично всіх типорозмайданчик для його зберігання. мірів рам залізничних вагонів і цистерн. 13 56506 14 15 56506 16 17 56506 18 19 Комп’ютерна верстка А. Рябко 56506 Підписне 20 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTilter with lifting centers
Автори англійськоюMotorin Artur Mykolaiovych, Maliuseiko Viktor Myronovych, Viunnyk Mykola Vasyliovych
Назва патенту російськоюКантователь с подъемными центрами
Автори російськоюМоторин Артур Николаевич, Малюсейко Виктор Миронович, Вьюнник Николай Васильевич
МПК / Мітки
МПК: B23K 37/04
Мітки: кантувач, центрами, підйомними
Код посилання
<a href="https://ua.patents.su/10-56506-kantuvach-z-pidjjomnimi-centrami.html" target="_blank" rel="follow" title="База патентів України">Кантувач з підйомними центрами</a>
Кантувач підвісний
Номер патенту: 54470
Опубліковано: 10.11.2010
Автори: Моторін Артур Миколайович, Малюсейко Віктор Миронович, Роздабара Владислав Іванович
МПК: B23K 37/047, B66C 1/00
Формула / Реферат:
1. Кантувач підвісний містить вертикально орієнтовані вантажоносійні елементи, виконані з можливістю кріплення до вантажопідйомних засобів, поворотні опори, розташовані в нижніх частинах вантажоносійних елементів, і з'єднані з ними захватні елементи, виконані з можливістю взаємодії з протилежними торцевими частинами виробів, при цьому щонайменше один вантажоносійний елемент виконаний з механізмом кантування, що включає привід, кінематично...
Кантувач великовагових металоконструкцій
Номер патенту: 7259
Опубліковано: 15.06.2005
Автори: Єрмаков Володимир Петрович, Желем Андрій Йосипович
МПК: B23K 37/04
Мітки: великовагових, кантувач, металоконструкцій
Формула / Реферат:
Кантувач великовагових металоконструкцій, що містить дві стійки і поворотну раму, з'єднану зі стійками з можливістю підйому-опускання рами і з можливістю повороту і фіксації її у повернутому положенні, і затискачі виробу, який відрізняється тим, що рама виконана у вигляді замкнутого контура з вільним отвором, обриси якого відповідають обрисам периметра виробу в його стійкому положенні, з можливістю вільного наскрізного переміщення виробу...
Кантувач для складання та зварювання рам залізничних пасажирських вагонів
Номер патенту: 29474
Опубліковано: 10.01.2008
Автори: Дорофій Сергій Миколайович, Браславець Олександр Володимирович, Яковлев Віталій Васильович, Захаренко Олена Олексіївна, Нестеренко Олег Миколайович, Дрюкова Катерина Юріївна, Касперов Олексій Петрович, Руденко Роман Анатолійович, Горовой Олександр Володимирович, Яцина Наталія Радіївна
МПК: B23K 37/047
Мітки: пасажирських, зварювання, залізничних, складання, вагонів, кантувач, рам
Формула / Реферат:
1. Кантувач для складання та зварювання рам залізничних пасажирських вагонів, що складається з двох дзеркально розташованих, синхронно працюючих частин, кожна з яких містить дві стійки, виконані у вигляді телескопічних нерухомих та рухомих частин, траверсу, тримач рами, встановлений на траверсі з можливістю осьового обертання, кожен механізм підйому траверси виконаний у вигляді каретки, встановленої своїми котками в напрямних нерухомого...
Кантувач кувального крана
Номер патенту: 63278
Опубліковано: 15.01.2004
Автори: Дорохов Микола Юрійович, Крупко Валерій Григорович
МПК: B21J 13/00
Мітки: кувального, крана, кантувач
Формула / Реферат:
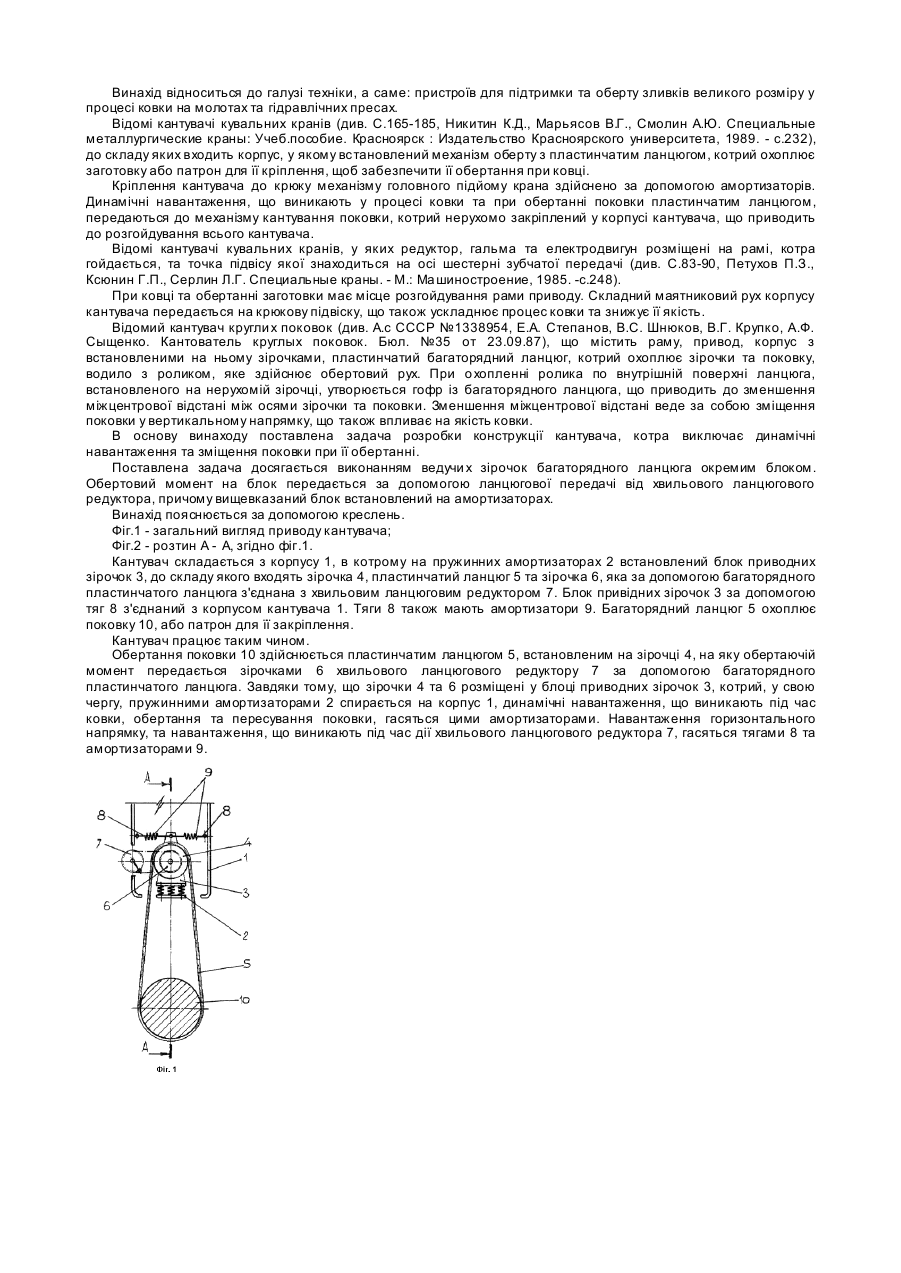
Кантувач кувального крана, що містить раму, привід, корпус з встановленими на ньому зірочками, пластинчатий багаторядний ланцюг, який охоплює зірочку та поковку, водило з роликом, яке здійснює обертовий рух, який відрізняється тим, що обертання поковки здійснюють пластинчатим ланцюгом, встановленим на зірочці, яка виконана єдиним блоком з веденою зірочкою хвильового ланцюгового редуктора, причому блок, у свою чергу, пружинними амортизаторами...
Кантувач для складання і зварювання виробів
Номер патенту: 76020
Опубліковано: 15.06.2006
Автори: Масловець Олександр Миколайович, Єрмаков Віталій Вікторович, Шиляєв Володимир Миколайович, Самогородський Олександр Степанович, Масловець Юрій Миколайович, Коробка Борис Афанасійович, Приходько Володимир Іванович, Назаренко Леонід Іванович
МПК: B23K 37/047, B23K 37/04
Мітки: складання, зварювання, кантувач, виробів
Формула / Реферат:
1. Кантувач для складання і зварювання виробів, що складається з двох дзеркальних синхронно працюючих частин, кожна з яких містить дві стійки, які складаються з телескопічних нерухомих і рухомих частин, траверсу, що одним кінцем шарнірно з'єднана з рухомою частиною однієї стійки, а інший її кінець виконаний з опорною поверхнею для рухомої частини другої стійки, механізм підйому і повороту траверси, тримач виробу, установлений на траверсі з...
Попередній патент: Назальний респіратор
Наступний патент: Кантувач з підйомними центрами
Випадковий патент: Лічильник-витратомір рідини чи газу