Спосіб урахування насичення асинхронного двигуна в системі векторного керування
Номер патенту: 80682
Опубліковано: 10.06.2013
Автори: Свистун Антон Володимирович, Родькін Дмитро Йосипович, Огарь Віта Олександрівна

Формула / Реферат
Спосіб урахування насичення асинхронного двигуна в системі векторного керування, який полягає у врахуванні нелінійності кривої намагнічування в системі векторного керування трифазним асинхронним електродвигуном із перетворювачем частоти як джерелом живлення, в якому сигнали з блоків датчиків струму та напруги, що вимірюють миттєві значення струму та напруги, датчика швидкості асинхронного двигуна надходять на вхід блоків перетворювачів координат, на вхід блоків пропорційно-інтегральних регуляторів потокозчеплення, активного і реактивного струмів, пропорційного регулятора швидкості, блока компенсації перехресних зв'язків, блоків задання швидкості і потокозчеплення, блоків перетворення координат, які в складі векторної системи керування здійснюють керування з орієнтацією за модулем головного потокозчеплення, який відрізняється тим, що на вхід блока, що виконує функцію компенсації насичення, надходять значення паспортних даних і сигнали з об'єкта керування (насиченого двигуна), з яких сигнали, що коректують значення параметра для регуляторів прямого та квадратурного струмів, частоти обертання двигуна, потокозчеплення, через зворотний зв'язок надходять на свої відповідні суматори і на керуючий вхід перетворювального пристрою живлення двигуна.
Текст
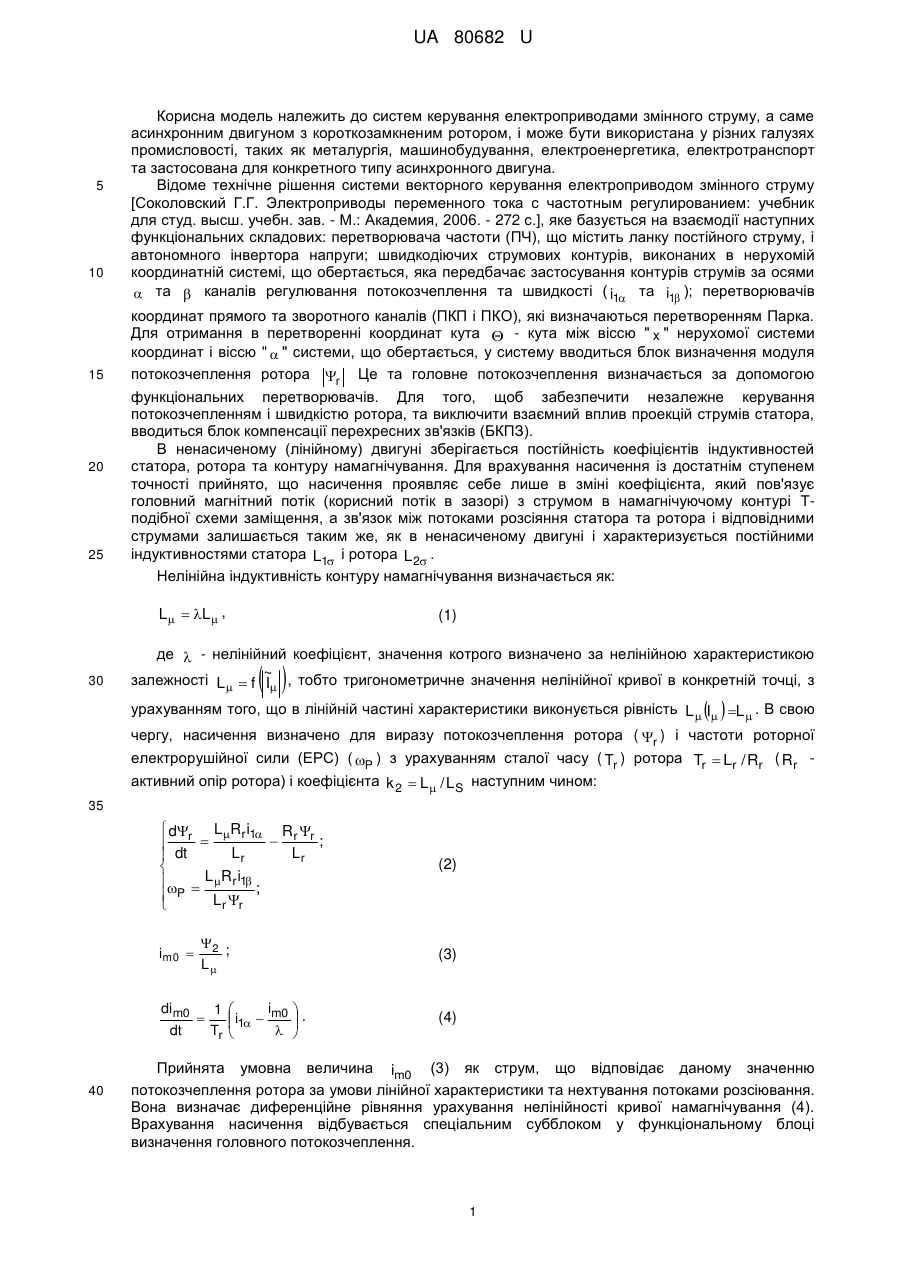
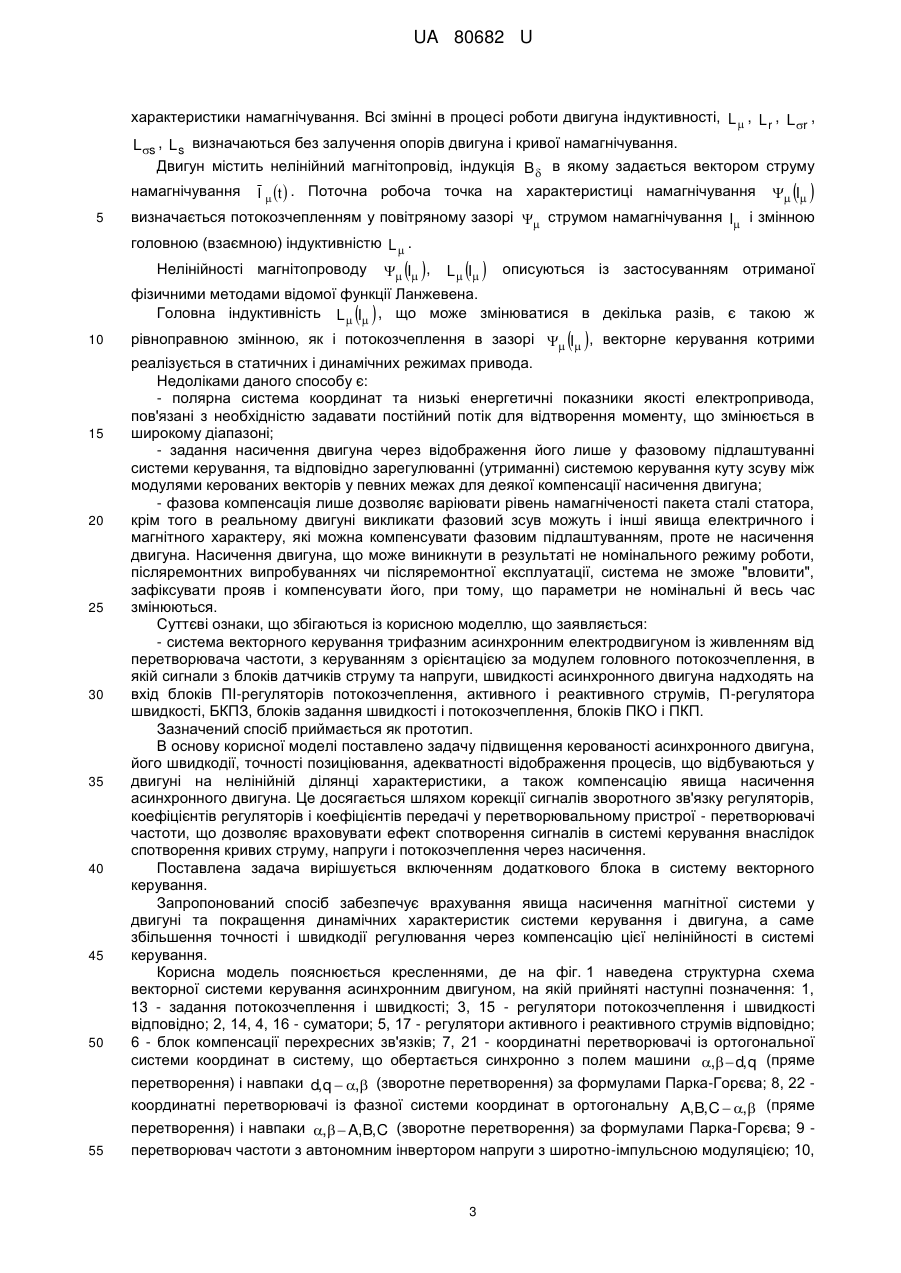
Реферат: Спосіб урахування насичення асинхронного двигуна в системі векторного керування, який полягає у врахуванні нелінійності кривої намагнічування в системі векторного керування трифазним асинхронним електродвигуном із перетворювачем частоти як джерелом живлення. На вхід блока, що виконує функцію компенсації насичення, надходять значення паспортних даних і сигнали з об'єкта керування (насиченого двигуна), з яких сигнали, що коректують значення параметра для регуляторів прямого та квадратурного струмів, частоти обертання двигуна, потокозчеплення, через зворотний зв'язок надходять на свої відповідні суматори і на керуючий вхід перетворювального пристрою живлення двигуна. UA 80682 U (54) СПОСІБ УРАХУВАННЯ НАСИЧЕННЯ АСИНХРОННОГО ДВИГУНА В СИСТЕМІ ВЕКТОРНОГО КЕРУВАННЯ UA 80682 U UA 80682 U 5 10 15 20 25 Корисна модель належить до систем керування електроприводами змінного струму, а саме асинхронним двигуном з короткозамкненим ротором, і може бути використана у різних галузях промисловості, таких як металургія, машинобудування, електроенергетика, електротранспорт та застосована для конкретного типу асинхронного двигуна. Відоме технічне рішення системи векторного керування електроприводом змінного струму [Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учебн. зав. - М.: Академия, 2006. - 272 с.], яке базується на взаємодії наступних функціональних складових: перетворювача частоти (ПЧ), що містить ланку постійного струму, і автономного інвертора напруги; швидкодіючих струмових контурів, виконаних в нерухомій координатній системі, що обертається, яка передбачає застосування контурів струмів за осями та каналів регулювання потокозчеплення та швидкості ( i1 та i1 ); перетворювачів координат прямого та зворотного каналів (ПКП і ПКО), які визначаються перетворенням Парка. Для отримання в перетворенні координат кута - кута між віссю " x " нерухомої системи координат і віссю " " системи, що обертається, у систему вводиться блок визначення модуля потокозчеплення ротора r Це та головне потокозчеплення визначається за допомогою функціональних перетворювачів. Для того, щоб забезпечити незалежне керування потокозчепленням і швидкістю ротора, та виключити взаємний вплив проекцій струмів статора, вводиться блок компенсації перехресних зв'язків (БКПЗ). В ненасиченому (лінійному) двигуні зберігається постійність коефіцієнтів індуктивностей статора, ротора та контуру намагнічування. Для врахування насичення із достатнім ступенем точності прийнято, що насичення проявляє себе лише в зміні коефіцієнта, який пов'язує головний магнітний потік (корисний потік в зазорі) з струмом в намагнічуючому контурі Тподібної схеми заміщення, а зв'язок між потоками розсіяння статора та ротора і відповідними струмами залишається таким же, як в ненасиченому двигуні і характеризується постійними індуктивностями статора L1 і ротора L 2 . Нелінійна індуктивність контуру намагнічування визначається як: L L , 30 (1) де - нелінійний коефіцієнт, значення котрого визначено за нелінійною характеристикою залежності L f ~ , тобто тригонометричне значення нелінійної кривої в конкретній точці, з I урахуванням того, що в лінійній частині характеристики виконується рівність L I L . В свою чергу, насичення визначено для виразу потокозчеплення ротора ( r ) і частоти роторної електрорушійної сили (ЕРС) ( P ) з урахуванням сталої часу ( Tr ) ротора Tr Lr / Rr ( R r активний опір ротора) і коефіцієнта k 2 L / L S наступним чином: 35 dr L R r i1 R r r ; Lr Lr dt L R r i1 ; P L r r im0 2 ; L dim0 1 dt Tr 40 i i1 m0 (2) (3) . (4) Прийнята умовна величина im0 (3) як струм, що відповідає даному значенню потокозчеплення ротора за умови лінійної характеристики та нехтування потоками розсіювання. Вона визначає диференційне рівняння урахування нелінійності кривої намагнічування (4). Врахування насичення відбувається спеціальним субблоком у функціональному блоці визначення головного потокозчеплення. 1 UA 80682 U 5 10 15 20 25 30 35 40 45 50 55 Недоліками даного технічного рішення є: - представлення векторної системи керування у системі, що обертається синхронно з полем статора ( , ), що не дає достатньої відповідності загальноприйнятим вимогам в оперуванні векторами потокозчеплення, швидкості та струмів; - використання в перетворенні координат нерухомої системи координат ( x , y ), що є недоцільно для застосування у якості проміжної координатної системи в перетворювачі координат і в блоці визначення куту , тому що потрібно застосування перетворення через експоненту із комплексним степенем e jc , що додає складності обчислення, а в деяких випадках робить неможливим обчислення перетворення із комплексним степенем, навіть при використанні у системі керування мікропроцесора чи мікроконтролера; - урахування насичення лише постійним коефіцієнтом, що унеможливлює для системи компенсацію насичення не в номінальному режимі роботи, для якого визначено даний коефіцієнт, а тим більше не відображає роботу двигуна на нелінійній ділянці характеристики кривої намагнічування. Ознаки, що збігаються із корисною моделлю, що заявляється: представлення урахування насичення асинхронного двигуна спеціальним блоком та включення його до функціонального блока визначення головного потокозчеплення двигуна. Відоме технічне рішення - спосіб урахування насичення асинхронного двигуна системи адаптивно-векторного керування асинхронним двигуном з короткозамкненим ротором [Виноградов А.Б. Учет потерь в стали, насыщения и поверхностного эффекта при моделировании динамических процессов в частотно-регулируемом асинхронном электроприводе // Электротехника. - 2005. - № 5. - С. 57-62]. Принцип побудови цієї системи дозволяє високоякісне керування об'єктами, які мають підвищені вимоги до динамічних властивостей і діапазону регулювання. Спосіб урахування насичення двигуна в цій системи визначений для представлення асинхронного двигуна, записаного за диференційними рівняннями Парка-Горєва. Система орієнтована за вектором потокозчеплення ротора, із базовими рівняннями, записаними відносно струму статора і потокозчеплення ротора в синхронній ортогональній системі координат d , q , 0 . Спосіб передбачає використання перетворювача напруги, що реалізує функції обмеження максимального значення заданої напруги, зворотного перетворення координат і компенсації запізнення, що вноситься системою керування, а також обмежувача напруги інвертора. Алгоритм роботи обмежувача організований таким чином, щоб в усіх режимах роботи привода величина заданої вихідної напруги інвертора не перевищувала його максимального значення із урахуванням фактичного значення вхідної напруги інвертора і обмежень, пов'язаних з неідеальністю силових ключів. При роботі привода в умовах обмеження напруги, канал d має пріоритет перед каналом q , тобто, у першу чергу, забезпечується бажаний рівень потокозчеплення, а вже потім формується потрібний електромагнітний момент. Дана логіка забезпечує коректне функціонування привода в другій зоні регулювання швидкості (уверх від номінальної). Недоліками даного технічного рішення є необхідність введення додаткового еквівалентного контуру, що враховує як додаткові до основних - потокозчеплення і струм, які відображають процес насичення двигуна. Таке представлення явища насичення призводить до ускладнення системи керування та приблизно відображає характер зміни індуктивності контуру намагнічування асинхронного двигуна не лише при зміні амплітуди та частоти напруги живлення, а й параметрів самого двигуна, тобто активних та індуктивних опорів статора, ротора та контуру намагнічування при тривалій експлуатації двигуна, після планового ремонту чи обслуговування. Система не здатна достовірно описати цю нелінійність при зміні параметрів двигуна. Ознаки, що збігаються із корисною моделлю, що заявляється: наявність блока урахування насичення асинхронного двигуна, що включається в регулятор, а саме в блок адаптації. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є спосіб "Метод керування асинхронним двигуном і електропривода, реалізуючи цей метод" (Method of induction motor control and electric drive realizing this method) [Патент США № 4926105. / V.A. Mischenko, N.I. Mischenko. New York. 1990]. Згідно з даним технічним рішенням, закономірності змін всіх індуктивностей при насиченні в статиці визначаються співвідношеннями фаз і модулів векторів без використання 2 UA 80682 U характеристики намагнічування. Всі змінні в процесі роботи двигуна індуктивності, L , L r , L r , L s , L s визначаються без залучення опорів двигуна і кривої намагнічування. Двигун містить нелінійний магнітопровід, індукція B в якому задається вектором струму намагнічування I t . Поточна робоча точка на характеристиці намагнічування I 5 визначається потокозчепленням у повітряному зазорі струмом намагнічування I і змінною головною (взаємною) індуктивністю L . Нелінійності магнітопроводу I , L I описуються із застосуванням отриманої фізичними методами відомої функції Ланжевена. Головна індуктивність L I , що може змінюватися в декілька разів, є такою ж 10 15 20 25 30 35 40 45 50 рівноправною змінною, як і потокозчеплення в зазорі I , векторне керування котрими реалізується в статичних і динамічних режимах привода. Недоліками даного способу є: - полярна система координат та низькі енергетичні показники якості електропривода, пов'язані з необхідністю задавати постійний потік для відтворення моменту, що змінюється в широкому діапазоні; - задання насичення двигуна через відображення його лише у фазовому підлаштуванні системи керування, та відповідно зарегулюванні (утриманні) системою керування куту зсуву між модулями керованих векторів у певних межах для деякої компенсації насичення двигуна; - фазова компенсація лише дозволяє варіювати рівень намагніченості пакета сталі статора, крім того в реальному двигуні викликати фазовий зсув можуть і інші явища електричного і магнітного характеру, які можна компенсувати фазовим підлаштуванням, проте не насичення двигуна. Насичення двигуна, що може виникнути в результаті не номінального режиму роботи, післяремонтних випробуваннях чи післяремонтної експлуатації, система не зможе "вловити", зафіксувати прояв і компенсувати його, при тому, що параметри не номінальні й весь час змінюються. Суттєві ознаки, що збігаються із корисною моделлю, що заявляється: - система векторного керування трифазним асинхронним електродвигуном із живленням від перетворювача частоти, з керуванням з орієнтацією за модулем головного потокозчеплення, в якій сигнали з блоків датчиків струму та напруги, швидкості асинхронного двигуна надходять на вхід блоків ПІ-регуляторів потокозчеплення, активного і реактивного струмів, П-регулятора швидкості, БКПЗ, блоків задання швидкості і потокозчеплення, блоків ПКО і ПКП. Зазначений спосіб приймається як прототип. В основу корисної моделі поставлено задачу підвищення керованості асинхронного двигуна, його швидкодії, точності позиціювання, адекватності відображення процесів, що відбуваються у двигуні на нелінійній ділянці характеристики, а також компенсацію явища насичення асинхронного двигуна. Це досягається шляхом корекції сигналів зворотного зв'язку регуляторів, коефіцієнтів регуляторів і коефіцієнтів передачі у перетворювальному пристрої - перетворювачі частоти, що дозволяє враховувати ефект спотворення сигналів в системі керування внаслідок спотворення кривих струму, напруги і потокозчеплення через насичення. Поставлена задача вирішується включенням додаткового блока в систему векторного керування. Запропонований спосіб забезпечує врахування явища насичення магнітної системи у двигуні та покращення динамічних характеристик системи керування і двигуна, а саме збільшення точності і швидкодії регулювання через компенсацію цієї нелінійності в системі керування. Корисна модель пояснюється кресленнями, де на фіг. 1 наведена структурна схема векторної системи керування асинхронним двигуном, на якій прийняті наступні позначення: 1, 13 - задання потокозчеплення і швидкості; 3, 15 - регулятори потокозчеплення і швидкості відповідно; 2, 14, 4, 16 - суматори; 5, 17 - регулятори активного і реактивного струмів відповідно; 6 - блок компенсації перехресних зв'язків; 7, 21 - координатні перетворювачі із ортогональної системи координат в систему, що обертається синхронно з полем машини , d, q (пряме перетворення) і навпаки d, q , (зворотне перетворення) за формулами Парка-Горєва; 8, 22 координатні перетворювачі із фазної системи координат в ортогональну A,B, C , (пряме 55 перетворення) і навпаки , A,B, C (зворотне перетворення) за формулами Парка-Горєва; 9 перетворювач частоти з автономним інвертором напруги з широтно-імпульсною модуляцією; 10, 3 UA 80682 U 11, 12 - датчики струму; 19, 20 - датчики напруги; 13 - завдання синхронної швидкості обертання 5 10 ; 18 - блок визначення модуля головного потокозчеплення і потокозчеплення ротора; 23 блок визначення синусної і косинусної складових ортогональних струмів; 24 - датчик потокозчеплення; 26 - датчик швидкості; ПЧ - пристрій перетворювача частоти; М - асинхронний двигун. На фіг. 2 наведено блок визначення модуля головного потокозчеплення і потокозчеплення ротора, на якій прийняті позначення: 27, 38 - Lm / Lr ; 28, 37 - дільник; 29, 34 піднесення до квадрата; 30, 33, 35, - суматор; 31, 36 - L m L r ; 32 - коефіцієнт 3 / 2 ; 39 - блок перетворення координат. На фіг. 3 прийняті позначення: 44 - блок ідентифікації параметрів двигуна (5), 40, 42, 45, 47 - блоки виробки абсолютної похибки визначення параметра двигуна відносно параметрів насиченого двигуна (6), 41, 43, 46, 48 - блок приведення до єдиних величин системи керування (7). L mR r dI d 1 r Ts Iq Ud ; Ts dt K r Id 2 Rs Lr R s dI Ts q K r Iq Ts Id L m r 1 Uq ; dt LrRs Rs T dr L I ; r md r dt L mIq ; s Tr r Lm 3 M 2 Z p L r Iq ; r J d Z dt M MC . p (5) / ; / ; p p I Id Id.p / Id ; Iq Iq Iq.p / Id . d / Uз ; / Uз ; d d Id I / Uз ; Id I / Uз . (6) (7) 15 20 25 30 де Uз - величина напруги задання для регуляторів, до якої зводяться значення коефіцієнтів датчиків зворотних зв'язків за струмом, потокозчепленням, частотою обертання двигуна. Метод реалізується наступним чином. При векторному керуванні, керованість здійснюється за миттєвими значеннями змінних. Реалізується принцип орієнтації векторних змінних одна відносно одної. При складанні диференційних рівнянь електричної машини, приймається відома ідеалізація, яка дозволяє одержати досить прості електромагнітні зв'язки при адекватному відображенні основного електромагнітного процесу в двигуні. Для дослідження електричних та електромагнітних процесів двигуна використовується запис диференційних рівнянь двигуна у фазній системі координат. Це дозволяє врахувати електромагнітні процеси пофазно, тобто в кожній фазі як статора, так і ротора двигуна окремо, що дає змогу підстроювати параметри асинхронного двигуна та створювати адаптивну систему керування, яка б враховувала ці зміни. Для визначення коефіцієнтів структурної схеми, розрахунку проекцій і визначення постійних часу, необхідно розрахувати Т-подібну схему заміщення асинхронного двигуна. Для визначення параметрів пропорційно-інтегральних регуляторів та на основі параметрів схеми заміщення двигуна, маємо: 1) постійні часу і коефіцієнти підсилення регуляторів реактивного (прямого) струму і потокозчеплення: 35 4 UA 80682 U k p 5 (7) де Tr , T , Ti , Tic1 - постійні часу, а k p , k pс1 , k с1 , k , k nч - коефіцієнти підсилення в складі регуляторів. 2) Аналогічно для розрахунку регуляторів активного (квадратурного) струму і швидкості маємо: Tіш 10 2Tk L Tk nч k с1 Tr k с1 Ls , ; Ti ;k pс1 ; Tic1 2Tk L k с1 Tk nч k с1 Rs 2 32Т k с r J k c 2 ; k рc 2 k pс1 Т k nч k с1 Ls , ; Tрш 8Т ; Т іс 2 Т іс1 T k nч k с1 Rs (8) Регулятори синтезовані в обертовій координатній системі ( d , q , 0 ), a векторна система складається з перетворювача частоти (ПЧ) з ланкою постійного струму і автономного інвертора напруги. Швидкодіючі струмові контури синтезовані також в обертовій системі, тому ці контури за прямою та квадратурною осями ( i1d та i1q ) включають в себе ПКП і ПКО, котрі визначаються перетворенням Парка. Для отримання в перетворенні координат кута між віссю " x " нерухомої системи координат і віссю " " обертової системи, в систему вводиться блок визначення модуля потокозчеплення ротора r . Це виконується у функціональному 15 20 25 30 35 40 перетворювачі 18 (фіг. 1). Головне потокозчеплення визначається у функціональному перетворювачі 27, 29-35, 37-38 (фіг. 2). Для того, щоб забезпечити незалежне керування потокозчепленням ротора і швидкістю ротора, та виключити взаємний вплив проекцій струмів статора, вводиться блок компенсації перехресних зв'язків БК. Координатні перетворення для блока прямого та зворотного перетворення виконуються за рівняннями Парка-Горєва. Спосіб урахування явища насичення двигуна реалізується у відповідності до блок-схем, наведених на фіг. 1, 2, 3. Запуск системи керування починається з ініціації завдання регулятора потокозчеплення 2, та регулятора швидкості 14 із затримкою на перемагнічування. В задатчику швидкості 13 формується наростаючий імпульс із затримкою 0,1 секунди, який обмежується. Паралельно з цим видається імпульс для задання потокозчеплення. Обидва сигнали надходять на свої відповідні суматори 2 і 14, в якому порівнюються (від них віднімається сигнал відповідної величини) з сигналом з датчика швидкості 1 та потокозчеплення з блока визначення головного потокозчеплення, котрі надходять на вхід суматора через передатні коефіцієнти відповідних датчиків. Порівняний сигнал із суматорів подають на вхід регуляторів потокозчеплення і швидкості відповідно, з яких перетворений сигнал також йде на суматор, де порівнюється з сигналами з датчиків струму, а потім надходить окремо кожен на свій канал регулювання струму - реактивний канал (прямого струму) 5 та активний канал (квадратурного струму) 17. З регуляторів струму через обмежувачі, сигнали струму I , I передаються на вхід блока d q компенсації перехресних зв'язків 6, котрий являє собою обернену модель двигуна для нейтралізації взаємного впливу каналів струму всередині системи управління. Паралельно з цими сигналами на вхід надходять сигнали з датчиків струму в синхронній системі координат (значення реальних, а не приведених струмів). Для їх формування відбувається перетворення координат за формулами Парка-Горєва. А саме - сигнали з датчиків струму та напруги 19, 20 та 10, 11, 12 надходять на вхід координатних перетворювачів , A,B, C 8 та A,B,C , 22 з яких миттєві значення струмів та напруг в ортогональних осях координат I , I , U , U надходять на вхід блока бездатчикового визначення потокозчеплення ротора 27, 30, 31, 35, 36, 38, 39 а потім значення , на блок визначення модуля головного потокозчеплення 28, 29, 32, 33, 34, 37. Отримані в цьому блоці значення cos , sin надходять на перетворювач координат , d, q 21 та зворотний перетворювач d, q , 7 паралельно із значеннями струму 45 в ортогональних осях I , I , та rm на вхід БКПЗ і суматор регулятора потокозчеплення відповідно. Вихідні струми Id , Iq із перетворювача координат , d, q йдуть на відповідні суматори регуляторів струму 4, 16 та на 6. Керуючі сигнали з 6 надходять до зворотного перетворювача координат d, q , 7, для якого вже були визначені значення cos , sin , а 5 UA 80682 U 5 10 15 20 потім на зворотний перетворювач координат , A,B, C 8. Кінцеві ж сигнали UA , UB , UC є керуючими для перетворювача 9, з якого напруга живлення прикладається до двигуна. Сигнал частоти обертання ротора з датчика швидкості 26, в свою чергу, надходить на вхід БКПЗ 6 і суматор регулятора швидкості системи управління. Таким чином відбувається замкнений цикл відпрацювання відповідних векторів змінних в часі величин двигуна та роботи системи керування. Урахування насичення в системі керування відбувається наступним чином. Зберігається припущення про насичення двигуна як про характеристику намагнічування машини, так як і для аналога. В реальних машинах обмотки виконуються не зосередженими, а розподіленими. Крім того, використовуються укорочення кроку, виконання обмоток з дробовим числом пазів на полюс і фазу та інші заходи, що сприяють заглушенню вищих просторових гармонік головного магнітного поля не тільки на величини потокозчеплень обмоток, а й на наведені в них ЕРС. Тому при визначенні потокозчеплення і ЕРС не тільки в ненасиченій, але й в насиченій машині допустимо враховувати лише основну просторову гармоніку кривої розподілення магнітної індукції. При цьому нелінійність характеристики головного магнітного шляху буде проявлятися лише в тому, що залежність амплітуди основної гармоніки магнітної індукції в зазорі, а відповідно від амплітуди результуючої магнітної сили, або від намагнічуючого струму i , виявиться нелінійною. В першому наближенні такий зв'язок можна визначити, використовуючи криву намагнічування за головним шляхом: i , (9) За своїм фізичнім смислом - є потокозчеплення фазної обмотки з головним магнітним 25 полем у випадку співпадання осі симетрії хвилі b з магнітною віссю даної обмотки. Урахування кривої намагнічування для визначення характеристик двигуна відбувається шляхом внесення замість коефіцієнта, який представляє індуктивність контуру намагнічування, опису нелінійної кривої, представленою аналітичним виразом: L f I , 30 35 (10) Компенсацію насичення магнітної системи в регуляторі проводиться наступним чином. В ненасиченій машині зберігається постійність коефіцієнтів індуктивностей L s , L r , L . Для врахування насичення з достатнім ступенем точності можна вважати, що насичення проявляє себе лише в зміні коефіцієнта, який пов'язує головний магнітний потік (корисний потік в зазорі) з струмом в намагнічуючому контурі Т-подібної схеми заміщення. Залежність кривої зміни індуктивності від струму намагнічування L I при насиченні двигуна характеризує ту обставину, що для отримання деякого значення потокозчеплення в зоні насичення буде 40 45 50 потрібний більший намагнічуючий струм, ніж для отримання того ж значення потокозчеплення в ненасиченій машині. Блок Б1 виконує функцію компенсації насичення. На вхід 44 надходять значення паспортних даних (фіг. 3), в ньому за (5) визначаються вектори струмів, частоти обертання і потокозчеплення у обертовій системі координат, які з нього надходять на вхід блоків 40, 42, 45, 47, у яких порівнюються із сигналами з об'єкта керування (насиченого двигуна), де приводяться до абсолютної похибки цих величин, і подаються на вхід блоків 41, 43, 46, 48, з яких сигнали, що коректують значення параметра для відповідного регулятора через зворотний зв'язок заводяться на свої суматори і на керуючий вхід блока перетворювального пристрою живлення двигуна 9. Урахування та компенсація нелінійності в системі векторного керування дозволяє отримати характеристики близькі до експериментальних та покращити показники якості замкненої системи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб урахування насичення асинхронного двигуна в системі векторного керування, який полягає у врахуванні нелінійності кривої намагнічування в системі векторного керування трифазним асинхронним електродвигуном із перетворювачем частоти як джерелом живлення, в 6 UA 80682 U 5 10 якому сигнали з блоків датчиків струму та напруги, що вимірюють миттєві значення струму та напруги, датчика швидкості асинхронного двигуна надходять на вхід блоків перетворювачів координат, на вхід блоків пропорційно-інтегральних регуляторів потокозчеплення, активного і реактивного струмів, пропорційного регулятора швидкості, блока компенсації перехресних зв'язків, блоків задання швидкості і потокозчеплення, блоків перетворення координат, які в складі векторної системи керування здійснюють керування з орієнтацією за модулем головного потокозчеплення, який відрізняється тим, що на вхід блока, що виконує функцію компенсації насичення, надходять значення паспортних даних і сигнали з об'єкта керування (насиченого двигуна), з яких сигнали, що коректують значення параметра для регуляторів прямого та квадратурного струмів, частоти обертання двигуна, потокозчеплення, через зворотний зв'язок надходять на свої відповідні суматори і на керуючий вхід перетворювального пристрою живлення двигуна. 7 UA 80682 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for accounting asynchronous motor saturation in vector control system
Автори англійськоюRodkin Dmytro Yosypovych, Ohar Vita Oleksandrivna, Svystun Anton Volodymyrovych
Назва патенту російськоюСпособ учета насыщения асинхронного двигателя в системе векторного управления
Автори російськоюРодькин Дмитрий Иосифович, Огарь Вита Александровна, Свистун Антон Владимирович
МПК / Мітки
МПК: H02P 21/00
Мітки: спосіб, асинхронного, векторного, керування, урахування, насичення, системі, двигуна
Код посилання
<a href="https://ua.patents.su/10-80682-sposib-urakhuvannya-nasichennya-asinkhronnogo-dviguna-v-sistemi-vektornogo-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб урахування насичення асинхронного двигуна в системі векторного керування</a>
Система векторного керування асинхронним двигуном
Номер патенту: 79969
Опубліковано: 13.05.2013
Автори: Лиходій Ігор Олегович, Огарь Віта Олександрівна
МПК: H02P 21/00
Мітки: двигуном, керування, векторного, асинхронним, система
Формула / Реферат:
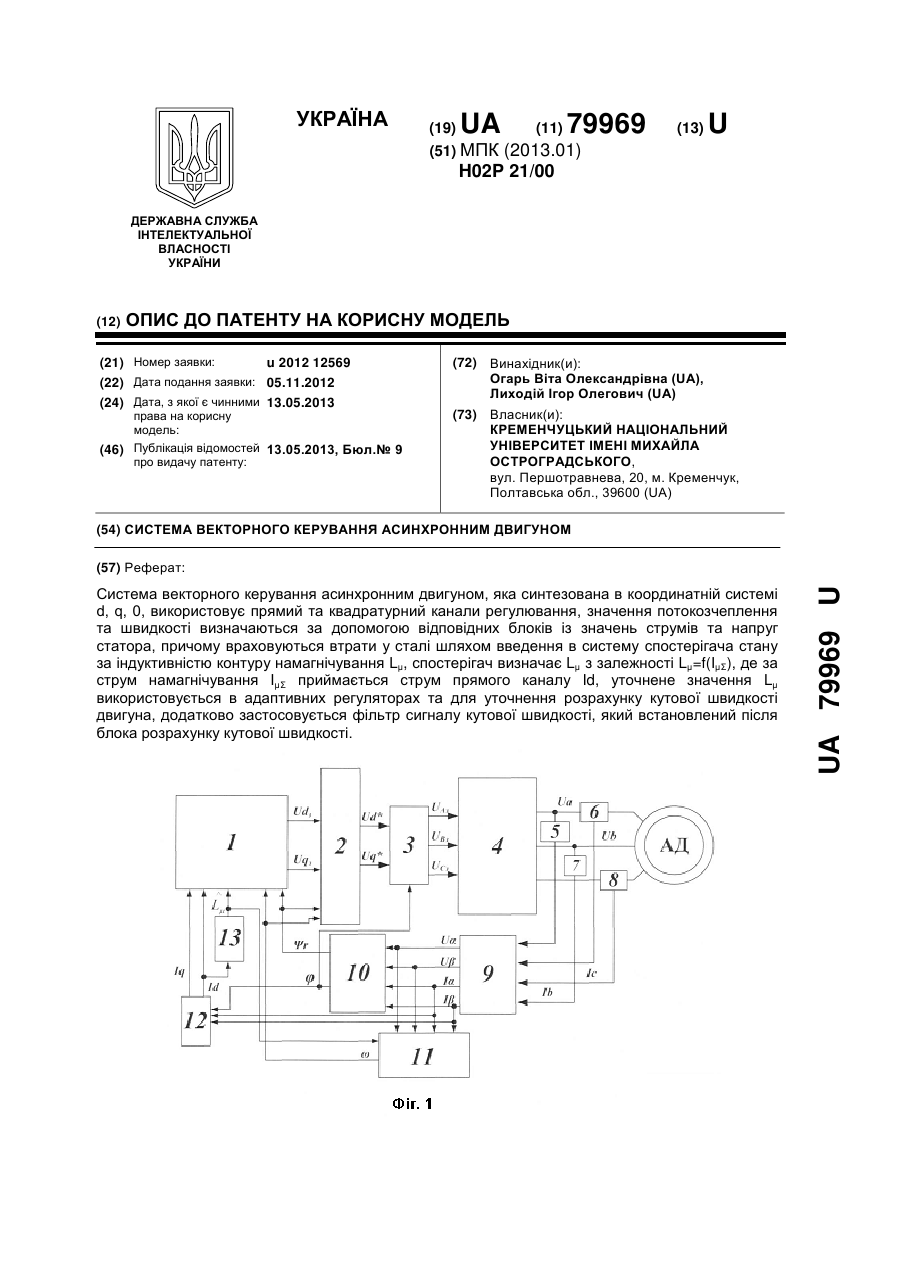
Система векторного керування асинхронним двигуном, яка синтезована в координатній системі d,q,0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, яка відрізняється тим, що враховуються втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування Lμ, спостерігач визначає...
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором
Номер патенту: 61511
Опубліковано: 25.07.2011
Автори: Мусієнко Юлія Миколаївна, Квашнін Валерій Олегович
МПК: G01L 3/10
Мітки: короткозамкненим, асинхронного, трифазного, моменту, ротором, двигуна, визначення, спосіб
Формула / Реферат:
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором, який полягає в тому, що визначення моменту трифазного асинхронного двигуна відбувається за електричними координатами двигуна, що визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми іА, іВ, іС), момент обчислюється у мікроконтролері та подається на керуючий елемент, який відрізняється тим, що створюється математична модель трифазного...
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна
Номер патенту: 48510
Опубліковано: 25.03.2010
Автори: Козакевич Ігор Аркадійович, Воробейчик Олег Станіславович, Топчієнко Юрій Анатолійович, Урдін Ігор Володимирович
МПК: H02K 15/00
Мітки: намагнічуючих, потокозчеплення, ротора, спосіб, асинхронного, значень, складових, положення, струму, статора, визначення, двигуна, активної, ідентифікатора, вектора
Формула / Реферат:
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна, що включаєреєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів, який відрізняється тим, що як реально діючі в асинхронному двигуні сигнали використовують поточні значення фазних струмів, при цьому...
Спосіб навантаження асинхронного двигуна та пристрій для його здійснення
Номер патенту: 72131
Опубліковано: 17.01.2005
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Тараненко Сергій Іванович
МПК: G01R 31/34, G01M 15/00
Мітки: спосіб, здійснення, пристрій, двигуна, асинхронного, навантаження
Формула / Реферат:
1. Спосіб навантаження асинхронного двигуна, який полягає в періодичній зміні з заданим періодом частоти й напруги живлення, вимірюванні струму в колі статора, визначенні розрахунковим шляхом ефективних і максимальних значень напруги та струму, визначенні температури обмоток при навантаженні, який відрізняється тим, що між джерелом живлення і двигуном, що навантажується, в кожну фазу статора асинхронного двигуна перед перетворювачем частоти...
Спосіб збільшення енергоефективності асинхронного двигуна
Номер патенту: 76391
Опубліковано: 10.01.2013
Автори: Будьонний Олександр Володимирович, Коваленко Євген Юрійович
МПК: H02P 21/00
Мітки: спосіб, двигуна, енергоефективності, асинхронного, збільшення
Формула / Реферат:
Спосіб збільшення енергоефективності асинхронного двигуна шляхом зменшення вихідної напруги, який відрізняється тим, що одночасно із зменшенням вихідної напруги проводять збільшення частоти перетворювача, до моменту досягнення першого локального мінімуму споживання ним реактивної складової енергії.
Попередній патент: Спосіб формування шарика на кінці дроту
Наступний патент: Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити
Випадковий патент: Спосіб виготовлення магнітної відхилювальної системи для електронно-променевої трубки