Спосіб локації джерел випромінювання і пристрій для його здійснення
Номер патенту: 89309
Опубліковано: 11.01.2010
Автори: Ріділа Олександр Степанович, Слютенко Владислав Ігорович, Черняк Сергій Іванович, Плита Олександр Андрійович


Формула / Реферат
1. Спосіб локації джерел випромінювання, що включає визначення зміщень точок відліку пеленгів при скануванні реперних джерел випромінювання нашоломного візирного пристрою багатогранними скануючими призмами оптико-локаційних блоків і врахування їх при визначенні кутів орієнтації лінії візування, який відрізняється тим, що після обчислення зміщень точок відліку пеленгів орієнтують нашоломний візирний пристрій таким чином, щоб його лінія візування була паралельна повздовжній осі базової системи координат, а потім визначають значення координат проекцій енергетичних центрів кожного реперного джерела випромінювання на горизонтальну площину базової системи координат, зміщують, безупинно реєструючи значення координат, два реперних джерела випромінювання уздовж поздовжньої осі щодо третього джерела випромінювання, що має найменше значення повздовжньої координати, і фіксують реперні джерела випромінювання за умови виконання рівності їх поздовжніх координат.
2. Пристрій дистанційного визначення координат джерел випромінювання, що містить нашоломний візирний пристрій з вузлом реперних випромінювачів, перший і другий оптико-локаційні блоки, що задають базову систему координат, блок визначення пеленгів джерел випромінювання, блок визначення зміщення точок відліку пеленгів, блок визначення координат джерел випромінювання, блок введення й зберігання даних відстані між оптико-локаційними блоками і суматор, при цьому перший і другий виходи блока визначення пеленгів джерел випромінювання з'єднані відповідно з першим і другим входами блока визначення зміщень точок відліку пеленгів і блока визначення координат джерел випромінювання, виходи першого і другого оптико-локаційних блоків з'єднані відповідно з першим і другим входами блока визначення пеленгів джерел випромінювання, вихід блока визначення зміщень точок відліку пеленгів з'єднаний з першим входом суматора, другий вхід суматора з'єднаний з виходом блока введення й зберігання даних відстані між оптико-локаційними блоками, а вихід суматора з'єднаний із третім входом блока визначення координат джерел випромінювання, який відрізняється тим, що в нього додатково введені блок обчислень і блок індикації, при цьому вхід блока обчислень з'єднаний з виходом блока визначення координат джерел випромінювання, перший його вихід з'єднаний з входом нашоломного візирного пристрою, його другий вихід з'єднаний з блоком індикації, два оптико-локаційні блоки оптично сполучені з нашоломним візирним пристроєм, а третій вихід блока обчислень є виходом пристрою.
Текст
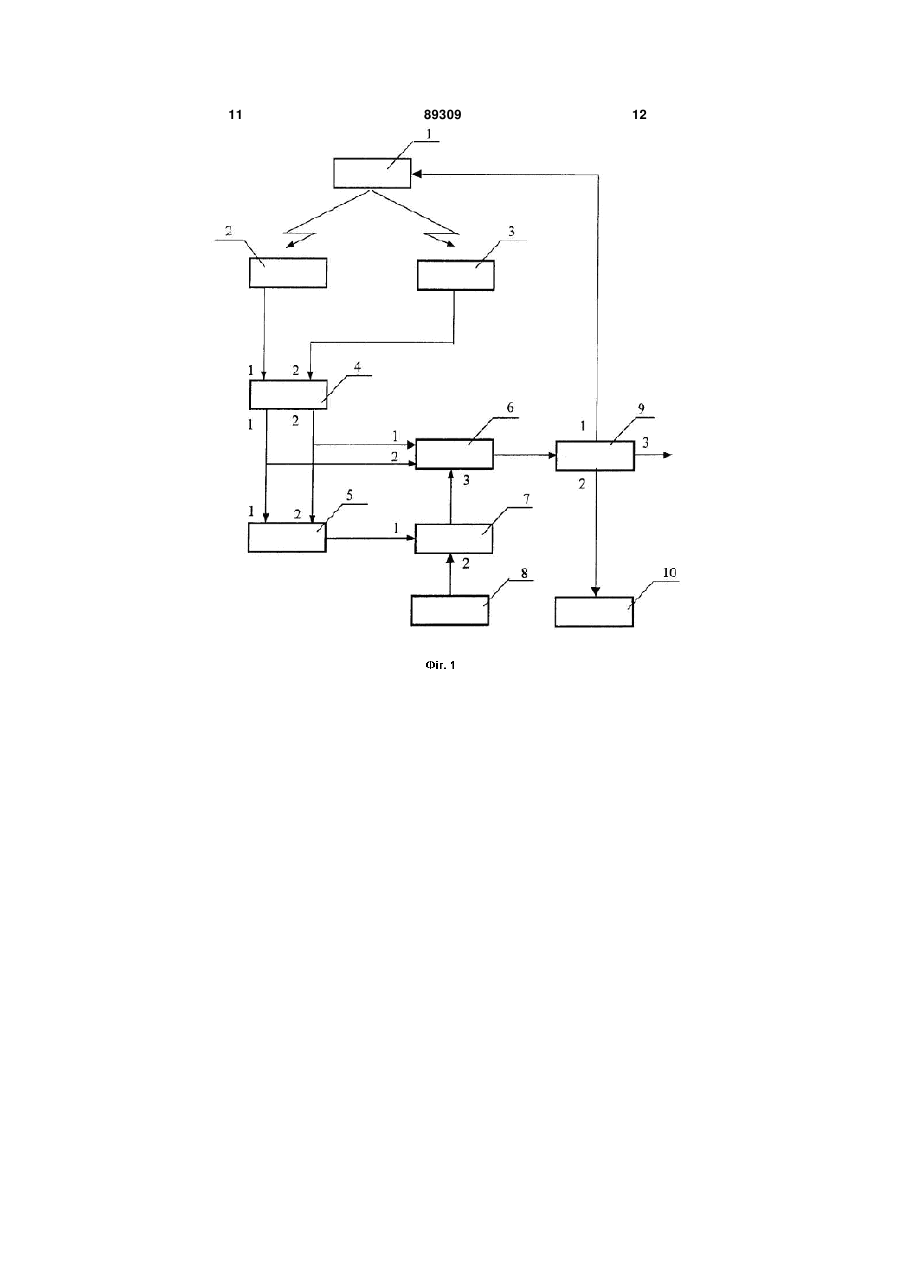
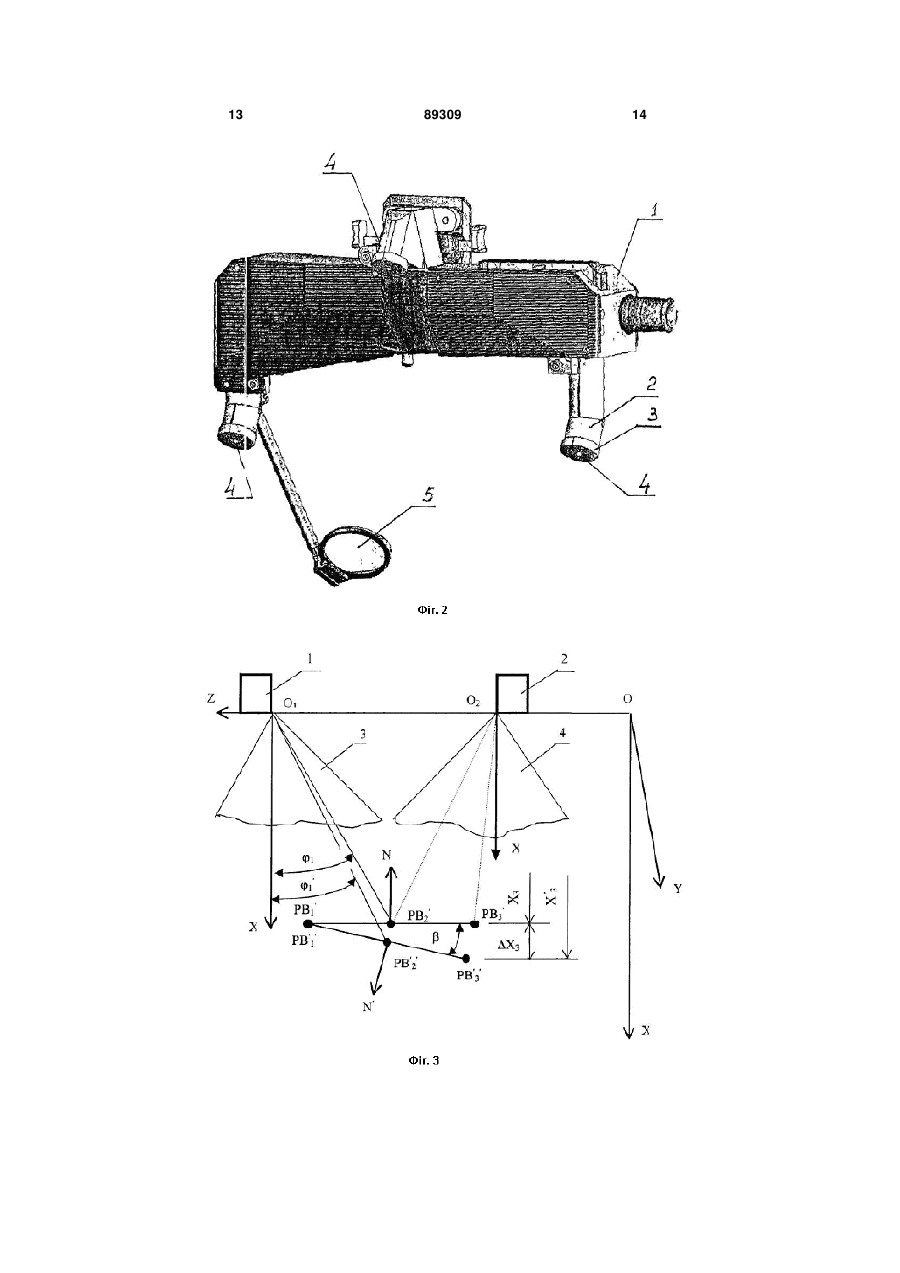
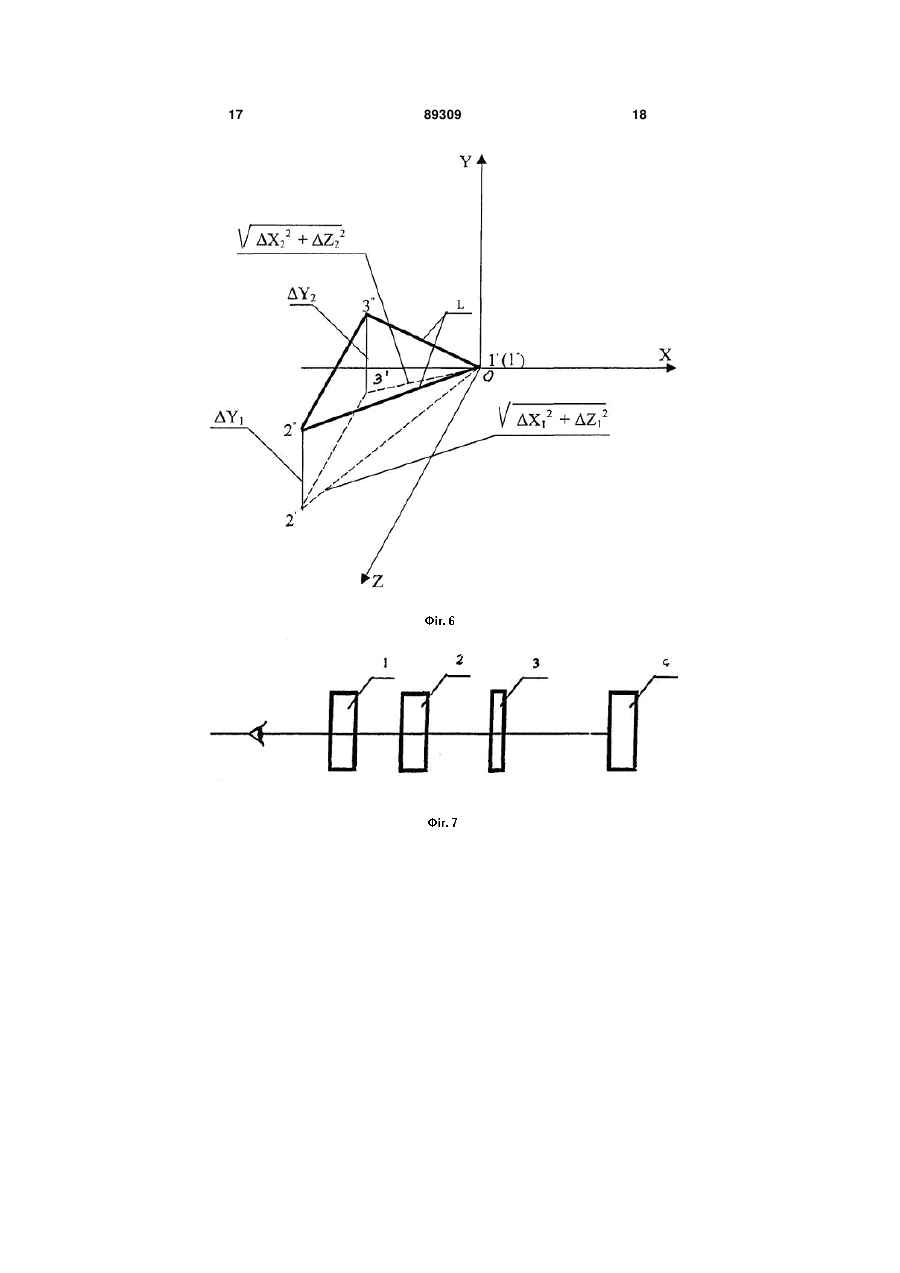
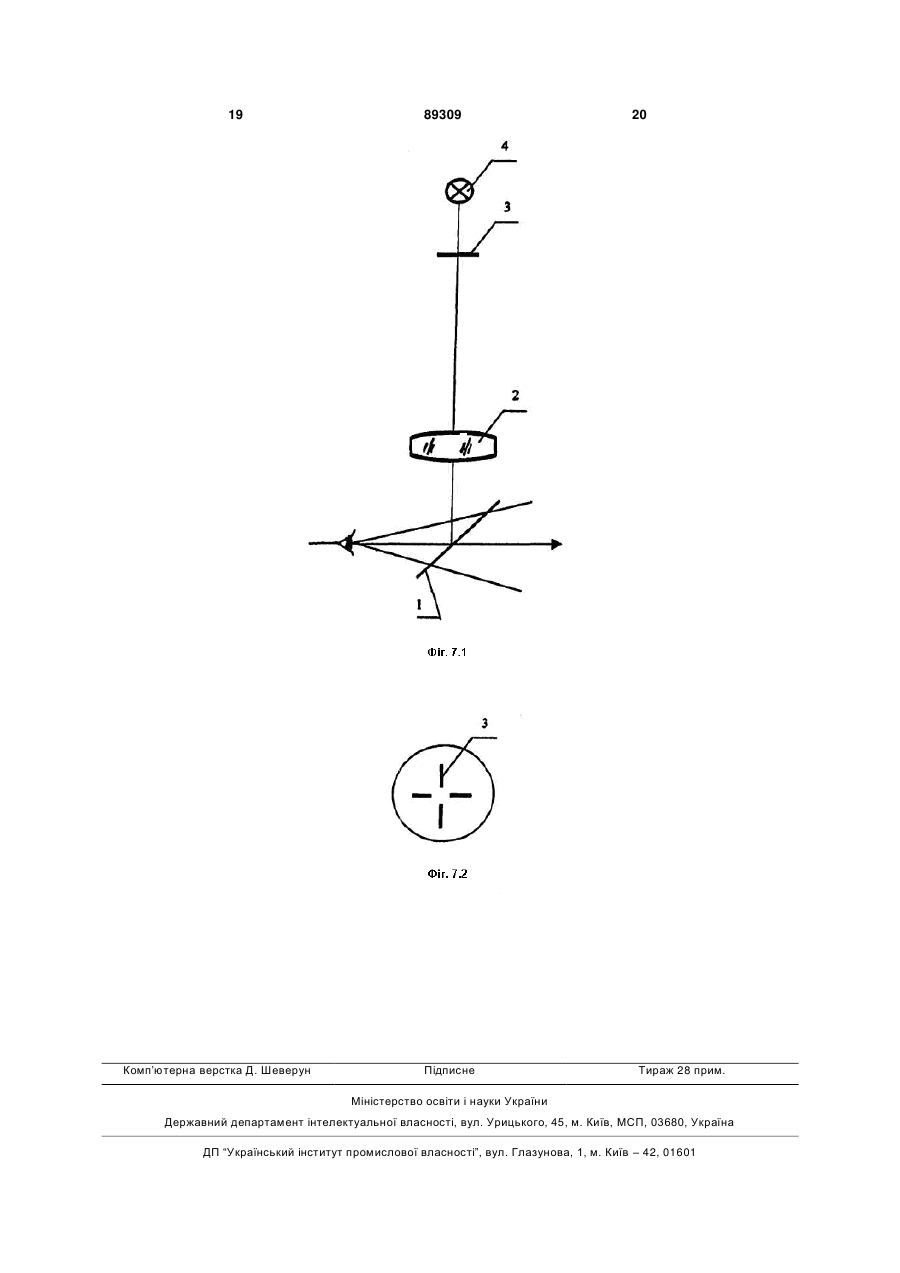
1. Спосіб локації джерел випромінювання, що включає визначення зміщень точок відліку пеленгів при скануванні реперних джерел випромінювання нашоломного візирного пристрою багатогранними скануючими призмами оптико-локаційних блоків і врахування їх при визначенні кутів орієнтації лінії візування, який відрізняється тим, що після обчислення зміщень точок відліку пеленгів орієнтують нашоломний візирний пристрій таким чином, щоб його лінія візування була паралельна повздовжній осі базової системи координат, а потім визначають значення координат проекцій енергетичних центрів кожного реперного джерела випромінювання на горизонтальну площину базової системи координат, зміщують, безупинно реєструючи значення координат, два реперних джерела випромінювання уздовж поздовжньої осі щодо третього джерела випромінювання, що має найменше значення повздовжньої координати, і фіксують реперні джерела випромінювання за умови виконання рівності їх поздовжніх координат. C2 2 (11) 1 3 89309 4 оптико-локаційні блоки (ОЛБ), розташовані на бастрою щодо розрахункової площини їх розташузовій (нерухомій) підставі, щодо якої виконується вання. визначення орієнтації рухомого об'єкта та блок Внаслідок відсутності обчислень і корекції від(блоки) визначення координат. хилень положень енергетичних центрів випроміОЛБ задають базову систему координат, щодо нювання щодо розрахункової площини їх розташуякої і визначають напрямки (пеленги) на кожне вання виникають похибки, схема утворення яких реперне джерело випромінювання, використовуюнаведена на фіг. 3. чи які, визначають кути візування рухомого об'єкта. Розглянемо джерела утворення похибок розАналіз роботи вищенаведених систем показує, ташування РВ на прикладі одного з варіантів пощо побудовані вони на основі способу, що визнабудови нашоломного візирного пристрою (НВУ), чає: наведеного на фіг. 2. - вимір пеленгів кожного РВ; Похибка відхилення положень енергетичних - визначення координат РВ за отриманими центрів випромінювання кожного РВ від заданого значеннями їх пеленгів і відомої базової відстані положення складається з: між точками відліку пеленгів; - похибки встановлення РВ (4) в оправі (3); - визначення кутів орієнтації рухомого об'єкта - похибки виготовлення оправи (3); за отриманими значеннями координат РВ. - похибки виготовлення корпусу утримувача Відомий спосіб локації джерел випромінюваноправи (2); ня (патент України №38212), згідно якого: - похибки кріплення корпусу оправи (2) до кор- визначають пеленги джерел випромінюванпусу НВУ (1). Сумарна похибка відхилення полоня; жень енергетичних центрів нижніх РВ один віднос- визначають зміщення потоку випромінювання но другого може досягати значення 0,6 мм. 1 джерел випромінювання при взаємодії його з опПри цьому вектор нормалі N до площини, що тичними елементами; проходить через енергетичні центри трьох джерел - коригують по визначеним зміщенням потоку випромінювання, буде розгорнутий відносно розвипромінювання пеленги, а потім визначають корахункового вектора N , а отже й вектора лінії візуординати джерел випромінювання. вання, на кут , що може досягати значення 14'. Найбільш істотним недоліком відомого спосоТаким чином, даному способу властиві досить бу, є відсутність обчислень відхилення положень великі похибки визначення лінії візування, що зниенергетичних центрів випромінювання джерел жує ефективність застосування нашоломних сисвипромінювання щодо розрахункової площини їх тем цілевказування. розташування, що призводить до виникнення знаНайбільш близьким пристроєм до пристрою, чних похибок визначення кутів орієнтації лінії візущо заявляється, за сукупністю ознак, є пристрій вання. дистанційного визначення координат джерел виВідомий пристрій дистанційного визначення промінювання (патент РФ №2 275 652). координат джерел випромінювання (патент УкраїДаний пристрій містить нашоломний візирний ни 38212), який містить у своєму складі розташопристрій з вузлом реперних випромінювачів, два вані на рухомій частині об'єкта джерела випроміОЛБ, блок визначення пеленгів джерел випромінювання, а на нерухомій частині об'єкта - ОЛБ, нювання, блок визначення зміщення точок відліку блок визначення зміщення точок відліку пеленгів і пеленгів, блок визначення координат джерел виблок визначення координат джерел випромінюпромінювання, блок введення і зберігання даних вання відстані між ОЛБ і суматор. Найбільш істотним недоліком відомого приВказані блоки забезпечують визначення коорстрою є відсутність блоківобчислень відхилення динат джерел випромінювання з врахуванням положень енергетичних центрів джерел випромізміщень точок відліку пеленгів на гранях скануюнювання щодо розрахункової площини їхнього чих призм. розташування. Суттєвим недоліком даного пристрою є відсуНаявність зазначеного недоліку призводить до тність блоків, які б забезпечили обчислення відхизначних похибок визначення кутів орієнтації рухолень енергетичних центрів випромінювання від мого об'єкта (шолома оператора). розрахункових положень їх розташування і зменНайбільш близьким до способу, що заявляєтьшили б похибки визначення координат джерел ся, за сукупністю ознак, є спосіб локації джерел випромінювання. випромінювання (патент РФ №2 275 652), згідно Перед авторами стояло завдання створення якого визначають: групи винаходів, що дозволять суттєво зменшити пеленги на джерела випромінювання; похибки визначення координат джерел випромі- зміщення точок відліку пеленгів на гранях нювання шляхом обчислень похибок і корекції фаскануючих призм; ктичних положень енергетичних центрів випромі- зміну відстані між ОЛБ, в якості якої прийманювання до розрахункових значень. ють відстань між точками відліку пеленгів в ОЛБ, Вказана єдина технічна властивість при здійспо значенням якої визначають координати джерел ненні групи винаходів по об'єкту - способу досягавипромінювання. ється тим, що у відомому способі локації джерел Даний спосіб прийнято за прототип. випромінювання, що включає визначення зміщень До істотного недоліку способу, прийнятого за точок відліку пеленгів при скануванні реперних прототип, варто віднести відсутність обчислень і джерел випромінювання нашоломного візирного корекції відхилень положень енергетичних центрів пристрою багатогранними скануючими призмами випромінювання РВ нашоломного візирного при 5 89309 6 оптико-локаційних блоків і врахуванні їх при виєдиний винахідницький задум, причому один із значенні координат джерел випромінювання: об'єктів групи, що заявляється - пристрій дистан- орієнтують нашоломний візирний пристрій ційного визначення координат джерел випромінютаким чином, щоб його лінія візування була паравання призначений для реалізації другого об'єкта лельна повздовжній осі базової системи коордигрупи винаходів - спосіба локації джерел випромінат; нювання, при цьому два об'єкти групи винаходів - визначають значення координат проекцій направлені на рішення однієї і тієї ж задачі з отриенергетичних центрів кожного реперного джерела манням єдиної технічної властивості. випромінювання на горизонтальну площину базоДокладний опис запропонованого способу і вої системи координат; пристрою наведено нижче з посиланнями на крес- зміщують, безупинно реєструючи значення лення, де зображено: координат, два реперних джерела випромінюванНа фіг. 1 - блок-схема запропонованого приня уздовж повздовжньої осі щодо третього джерестрою; ла випромінювання, що має найменше значення На фіг. 2 - зовнішній вигляд НВУ однієї із заповздовжньої координати і фіксують реперні джестосованих у цей час НСЦ; рела випромінювання за умови виконання рівності На фіг. 3 - схема утворення похибок у способіїхніх повздовжніх координат. прототипі і пристрої, що пояснює його роботу; Таким чином, введення додаткових операцій в На фіг. 4 - схема пеленгації РВ; спосіб - прототип дозволяє провести обчислення і На фіг.5 - діаграма приросту координат проеккорекцію положень енергетичних центрів випроміцій РВ на базову площину; нювання джерел випромінювання до розрахункоНа фіг. 6 - діаграма приросту координат Y1, вих значень. Y2; Вказана єдина технічна властивість при здійсНа фіг. 7, 7.1, 7.2 - схема побудови автоколліненні групи винаходів по об'єкту - пристрою досяматора НВУ; гається тим, що у відомий пристрій дистанційного На фіг. 8 - алгоритм обчислень. визначення координат джерел випромінювання, На кресленнях прийняті наступні позначення. що містить нашоломний візирний пристрій з вузНа фіг. 1: лом реперних випромінювачів, перший і другий 1 - нашоломний візирний пристрій; оптико-локаційні блоки, що задають базову систе2, 3 - перший ОЛБ і другий ОЛБ відповідно; му координат, блок визначення пеленгів джерел 4 - блок визначення пеленгів джерел випромівипромінювання, блок визначення зміщення точок нювання; відліку пеленгів, блок визначення координат дже5 - блок визначення зміщень точок відліку перел випромінювання, блок введення й зберігання ленгів; даних відстані між оптико -локаційними блоками і 6 - блок визначення координат джерел випросуматор. Перший і другий виходи блока визначенмінювання; ня пеленгів джерел випромінювання з'єднані від7 - суматор; повідно з першим і другим входами блока визна8 - блок введення і зберігання даних відстані чення зміщень точок відліку пеленгів і блока між оптиковизначення координат джерел випромінювання. локаційними блоками; Виходи першого і другого оптико-локаційних 9 - блок обчислень; блоків з'єднані відповідно з першим і другим вхо10 - блок індикації; На фіг. 2: дами блока визначення пеленгів джерел випромі1 - нашоломний візирний пристрій; 2- корпус нювання. утримувача оправи; З - оправа для встановлення Вихід блока визначення зміщень точок відліку РВ; пеленгів з'єднаний з першим входом суматора, 4- три РВ; другий вхід суматора з'єднаний з виходом блока 5- відбивач. На фіг. 3: введення й зберігання даних відстані між оптико OXYZ - базова система координат; локаційними блоками, а вихід суматора з'єднаний 1,2 - перший і другий ОЛБ відповідно; із третім входом блока визначення координат 3,4 - зони сканування першого і другого ОЛБ джерел випромінювання. відповідно; Додатково введені блок обчислень і блок індиРВ1', РВ2', РВ3' - проекції на базову площину кації. Вхід блока обчислень з'єднаний з виходом першого, другого і третього реперних джерел виблока визначення координат джерел випромінюпромінювання при відсутності похибок відхилень вання, перший його вихід з'єднаний із входом наположень енергетичних центрів випромінювання шоломного візирного пристрою, його другий вихід щодо розрахункової площини їх встановлення; з'єднаний із блоком індикації, а два оптикоРВ'1', РВ'2', РВ'3' - проекції на базову площину локаційних блоки оптично сполучені з нашоломпершого, другого і третього реперних джерел виним візирним пристроєм. Третій вихід блока обчипромінювання при наявності похибок відхилень слень є виходом пристрою. положень енергетичних центрів випромінювання Таким чином, введення додаткових блоків в щодо розрахункової площини їх розташування; пристрій - прототип дозволяє провести обчисленN, N' - вектор нормалі до площини розташуня і корекцію положень енергетичних центрів вивання реперних випромінювачів, коли вони перепромінювання джерел випромінювання до розрабувають у положеннях PB1', PB2', РВ3' і РВ'1', РВ'2', хункових значень. РВ'3' відповідно; Група винаходів, що заявляється, відповідає Х3, Х3' - повздовжні координати проекцій РВ3' і вимогам єдності винаходу, оскільки вона утворює РВ'3' на базову площину відповідно; 7 Х3 - повздовжня похибка розташування РВ3'; 1' - пеленги на РВ2' і РВ'2' відповідно (для спрощення креслення показані кути пеленгації тільки першого ОЛБ); - кут відхилення вектора нормалі N' щодо розрахункового вектора N. На Фіг.4: O1XZ, O2XZ - системи координат першого і другого ОЛБ відповідно; 1', 2',3' - проекції енергетичних центрів випромінювання реперних джерел випромінювання на базову площину; 1 2 3 1 , 2 , 3 - пеленги на проекції енергетичних центрів випромінювання 1', 2', 3' реперних джерел випромінювання на базову площину, виміряні ОЛБ1; 1 2 3 - пеленги на проекції енергети1 , 2 , 3 чних центрів випромінювання 1', 2', 3' реперних джерел випромінювання на базову площину, виміряні ОЛБ2; На фіг.5: OXZ - базова система координат (горизонтальна площина); Х1, Х2, Х3 - повздовжні координати проекцій енергетичних центрів випромінювання 1' 2', 3' реперних джерел випромінювання на базову площину відповідно; Z1, Z2, Z3 - бокові координати проекцій енергетичних центрів випромінювання 1', 2', 3' реперних джерел випромінювання на базову площину відповідно. На фіг. 6: OXYZ - базова система координат; Y1, Y2; - різниця між положеннями проекцій енергетичних центрів випромінювання РВ 1', 2', 3' на базову площину і положеннями випромінювачів 1", 2", 3" при плоскопараллельному переміщенні їх по висоті до сполучення джерела 1" з його проекцією 1'; Робота, згідно запропонованого способу, полягає в тому, що розміщують НВУ в робочій зоні сканування обох ОЛБ і орієнтують його лінію візування, яка спостерігається у відбивачі 5 (фіг.2), паралельно повздовжній осі ОХ базової системи координат(фіг.3). При цьому може спостерігатися явище, коли нормаль N' до вертикальної площини, що проходить через проекції енергетичних центрів випромінювання реперних джерел РВ'1', РВ'2', РВ'3' буде розгорнута щодо розрахункового положення нормалі N на кут , отже й лінія візування оператора (око-центр перехрестя, відображене на відбивачі 1 (фіг.7.1 ) НВУ буде розгорнута на кут щодо нормалі N. Для усунення цього недоліку зміщують, безупинно реєструючи обмірювані повздовжні координати проекцій (на базову площину) енергетичних центрів випромінювання, два джерела випромінювання (у розглянутому випадку РВ'2, РВ'3) уздовж повздовжньої осі щодо третього РВ'1 що має найменше значення повздовжньої координати, і фіксують РВ за умови рівності їхніх повздовжніх координат проекцій енергетичних центрів випромінювання на базову площину. 1, 89309 8 Таким чином, в запропонованому способі локації джерел випромінювання виконується обчислення і корекція положень енергетичних центрів випромінювання до розрахункових положень, коли повздовжні координати трьох РВ досягають одного і того ж значення, що дає змогу зменшити на 14' похибки визначення кутів орієнтації лінії візування. Роботу запропонованого пристрою дистанційного визначення координат джерел випромінювання розглянемо на прикладі блок-схеми, наведеної на фіг. 1. НВУ (1) побудоване на основі вузла реперних випромінювачів, жорстко пов'язаного з візиром. Вузол реперних випромінювачів містить у собі три випромінювачі, розташовані в одній площині у вигляді трикутника. Джерела випромінювання можуть бути виконані у вигляді точкових діодних випромінювачів. Візир представляє собою оптичний коліматорний формувач, призначений для виводу в поле зору оператора зображення візирної мітки, наприклад, у вигляді хреста (фіг. 7.2). До складу візира (фіг.7, 7.1) входять розміщені на лінії візування ока оператора, плоскопаралельна напівпрозора пластина 1, встановлена з нахилом, вхідний об'єктив 2, виконаний, наприклад, у вигляді лінзового об'єктива. У фокальній площині об'єктива розміщена марка - сітка 3, виконана, наприклад, на склі або металі у вигляді прозорого хреста на темному фоні. Марка-сітка підсвічується джерелом випромінювання 4, наприклад, випромінюючим діодом, що живиться від елементів живлення блока обчислень. При формуванні лінії візування світло від джерела випромінювання 4 проходить через маркусітку 3 і попадає в об'єктив 2. Далі світло відбивається від плоскопаралельної пластини 1 і попадає в око оператора у вигляді колімованого випромінювання, формуючи в такий спосіб в полі зору оператора зображення візирної мітки у вигляді хреста (фіг.7.2). Оптико-локаційні блоки 2 і З, блок визначення пеленгів джерел випромінення 4, блок визначення зміщень точок відліку пеленгів 5, блок визначення координат джерел випромінення 6, суматор 7 і блок введення і зберігання даних відстані між оптико-локаційними блоками 8 по своїй побудові і функціональному призначенні відповідають блокам прототипу. Блок обчислень 9 може бути виконаний, наприклад, на мікроконтролері типу ATMEGA 128. Блок індикації 10 може бути виконаний, наприклад, на основі дисплея світлодіодного HCMS 2925 ANG1LTNT із двома лінійками індикації. Застосування двох таких дисплеїв повністю забезпечує необхідну індикацію похибок положень енергетичних центрів випромінювання трьох світловипромінюючих діодів. Напруга живлення джерел випромінювання надходить від блока обчислень 9. При цьому перший і другий виходи блока визначення пеленгів джерел випромінювання з'єднані відповідно з першим і другим входами блока визначення зміщень точок відліку пеленгів і блока визначення координат джерел випромінювання. 9 89309 10 Виходи першого і другого оптико-локаційних Обчислені координати проекцій енергетичних блоків з'єднані відповідно з першим і другим вхоцентрів випромінювання кожного РВ надходять в дами блока визначення пеленгів джерел випроміблок обчислень 9, де згідно алгоритму обчислень нювання. (фіг. 8) виконується обчислення кутів орієнтації Вихід блока визначення зміщення точок відліку лінії візування й керування роботою блока індикапеленгів з'єднаний з першим входом суматора, ції 10. другий вхід суматора з'єднаний з виходом блока В блоці 2 (алгоритма) виконується введення введення і зберігання даних відстані між оптикозначень координат проекцій енергетичних центрів локаційними блоками, а вихід суматора з'єднаний випромінювання Хі, Zi на базову площину. із третім входом блока визначення координат В блоках 3,5,7 виконується аналіз приналежджерел випромінювання. ності обчислених координат до відповідного РВ. Вхід блока обчислень з'єднаний з виходом В блоках 4,6,8 формуються команди на вклюблока визначення координат джерел випромінючення відповідної лінійки індикатора для відобравання, перший його вихід з'єднаний із входом наження значень координат опитуваного РВ. шоломного візирного пристрою, його другий вихід В блоці 9 виконується обчислення проекцій з'єднаний із блоком індикації, а два оптикосторін трикутника 1', 2', 3' (фіг.4) на осі OX i OZ ( локаційних блоки оптично сполучені з вузлом рефіг.5) Х1, Х2, Z1, Z2. перних випромінювачів нашоломного візирного В блоках 10, 11 виконується обчислення верпристрою. Третій вихід блока обчислень є виходом тикальних координат Y1, Y2. пристрою. В блоці 12, виконується обчислення коефіцієнПри сполученні скануючого плоского віялового тів А, В, С рівняння площини, у якій лежать реперпучка ОЛБ із РВ НВУ в блоці визначення пеленгів ні джерела випромінювання. 4 обчислюється пеленг, що відповідає положенню У блоці 13 виконується обчислення кутів орієцього Г'В в просторі (у базовій системі координат) нтації лінії візування. відносно ОЛБ. Таким чином, у порівнянні із прототипом, в заВ блоці визначення координат джерел випропропонованому пристрої знижені похибки формумінювання 6 з урахуванням обчислених значень вання кутів орієнтації лінії візування на величину, пеленгів кожного РВ, зміщень точок відліку пеленяка може складати 14 кутових хвилин, що підвигів, обчислених у блоці визначення зміщення точок щує ефективність застосування як самих нашоловідліку пеленгів 5 і даних блока введення і зберімних систем цілевказування, так і систем, які спогання даних 4 визначаються координати проекцій лучаються з ними. на базову площину енергетичних центрів випромінювання. 11 89309 12 13 89309 14 15 89309 16 17 89309 18 19 Комп’ютерна верстка Д. Шеверун 89309 Підписне 20 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for location of transmitters
Автори англійськоюCherniak Serhii Ivanovych, Ridila Oleksandr Stepanovych, Plyta Oleksandr Andriiovych, Sliutenko Vladyslav Ihorovych
Назва патенту російськоюСпособ локации источников излучения и устройство для его осуществления
Автори російськоюЧерняк Сергей Иванович, Ридила Александр Степанович, Плита Александр Андреевич, Слютенко Владислав Игоревич
МПК / Мітки
Мітки: джерел, здійснення, локації, спосіб, випромінювання, пристрій
Код посилання
<a href="https://ua.patents.su/10-89309-sposib-lokaci-dzherel-viprominyuvannya-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб локації джерел випромінювання і пристрій для його здійснення</a>
Спосіб локації джерел випромінювання і пристрій для його реалізації
Номер патенту: 38212
Опубліковано: 17.03.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: B25J 19/02, G01B 9/00
Мітки: випромінювання, джерел, реалізації, локації, пристрій, спосіб
Формула / Реферат:
1. Спосіб локації джерел випромінювання з застосуванням визначення кутів-пеленгів джерел випромінювання, з використанням оптичних елементів, який відрізняється тим, що визначають параметри зміщення потоку випромінювання джерел випромінювання при взаємодії з оптичними елементами, які потім використовують при визначенні координат джерел випромінювання.2. Спосіб за п. 1, який відрізняється тим, що визначення параметрів зміщення виконують...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52633
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: станція, координат, пасивна, випромінювання, вимірювання, джерел
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднані відповідно з входом БОППГ і входом БОПОГ, вихід останнього є першим виходом станції, яка відрізняється тим, що у неї додатково введені блок визначення швидкості зміни...
Спосіб просторової локації джерел дефектів, що розвиваються
Номер патенту: 36499
Опубліковано: 16.04.2001
Автори: Бабак Віталій Павлович, Філоненко Сергій Федорович
МПК: G01N 29/06, G01N 27/06
Мітки: локації, розвиваються, дефектів, джерел, просторової, спосіб
Текст:
...давачів: h, 1 - висота та довжина об'єкту контролю; Л, Л' - лінії напрямів на джерело випромінювання для першого та другого квадратів. Розрахунки показали, що похибка визначення місця знаходження джерела випромінювання не перевищує 7%. c2 t t +t t t 31 21 23 41 43 ; 4B t 32 - t 41 (1) X2 = c t (t + t ) - 2t 21t 41 t 42 31 23 41 4B t 34 - t 21 2 де c - швидкість звуку в матеріалі; B - базовий розмір антени (фіг. 1); t 21 , t 23 … - РЧП...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 37949
Опубліковано: 15.05.2001
Автор: Черниш Станіслав Костянтинович
Мітки: пасивна, випромінювання, координат, джерел, станція, вимірювання
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання містить в собі пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ), блок обробки пеленгів оберненого галсу (БОПОГ), блок визначення швидкості зміни пеленга (БВШЗП) і блок визначення дальності, які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднаний з входами БОППГ і БОПОГ, перший вихід якого е першим виходом пасивної станції, перший...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: випромінювання, станція, джерел, пасивна, вимірювання, координат
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Попередній патент: Пристрій для виміру пульсацій швидкості потоку рідини
Наступний патент: Прилад зниження рівня звуку пострілу стрілецької зброї
Випадковий патент: Препарат для лікування бактеріального вагінозу, спосіб його одержання та спосіб лікування бактеріального вагінозу