Добувна установка, зокрема для гірничих розробок, і спосіб керування добувною установкою
Номер патенту: 96070
Опубліковано: 26.09.2011
Автори: Бекер Уве, Мертен Герхард, Боймлер Манфред, Віртц Йорг, Шюрер Карл-Хайнц
Формула / Реферат
1. Добувна установка, зокрема для гірничих розробок, яка містить першу привідну станцію і другу привідну станцію, що переважно натягується за допомогою натяжного пристрою, встановлені в привідних станціях (1, 4; 101, 104) ланцюгові зубчаті колеса (2, 5; 102, 105), привідний ланцюг (6; 106), що має ланцюгові ланки і приводиться в дію за допомогою ланцюгових зубчатих коліс, який проходить між ланцюговими зубчатими колесами у верхній гілці і в нижній гілці, і щонайменше один сенсорний пристрій для визначення щонайменше одного стану привідного ланцюга у верхній гілці або в нижній гілці, яка відрізняється тим, що кожний сенсорний пристрій (20, 30; 120) має утворений генератором (21; 121) магнітного поля датчик і забезпечену множиною детекторів (23; 123) магнітного поля матрицю (22; 122) детекторів як детектор, причому детектор і датчик розташовані збоку від проходу (15; 115) для обмірюваної гілки привідного ланцюга (6; 106).
2. Добувна установка за п. 1, яка відрізняється тим, що детектор (22; 122) і датчик (21; 121) лежать протилежно один одному, при цьому матриця (22; 122) детекторів переважно проходить по висоті проходу (15; 115).
3. Добувна установка за п. 1 або 2, яка відрізняється тим, що матриця (22; 123) детекторів має множину детекторів (23) магнітного поля, які розташовані поруч один з одним і множину розташованих один над одним детекторів (23) магнітного поля.
4. Добувна установка за будь-яким з пп. 1-3, яка відрізняється тим, що матриця (22) детекторів розташована, зокрема вбудована в бічні стінки машинної рами або бічні стінки короба ланцюгового зубчатого колеса привідної станції.
5. Добувна установка за будь-яким з пп. 1-4, яка відрізняється тим, що генератор (21) магнітного поля розташований, зокрема вбудований, в бічні стінки (14) машинної рами або бічні стінки короба ланцюгового зубчатого колеса привідної станції.
6. Добувна установка за п. 4 або 5, яка відрізняється тим, що матриця детекторів і/або датчик розташовані в корпусі з немагнітного матеріалу, такого як, зокрема, латунь, бронза, мідь, алюміній, титан, аустенітна сталь або її сплави,
кераміка або пластмаса.
7. Добувна установка за будь-яким з пп. 1-6, яка відрізняється тим, що датчик утворений генератором (221) магнітного поля і переважно обертаними або обертовими магнітами (240).
8. Добувна установка за п. 7, яка відрізняється тим, що датчик (221) має гідравлічний привід (243) обертання, зокрема гідромотор з клапаном регулювання потоку для регулювання швидкості обертання.
9. Добувна установка за п. 7 або 8, яка відрізняється тим, що утворюючий датчик постійний магніт має силу магнітного поля щонайменше 0,5 Т.
10. Добувна установка за будь-яким з пп. 1-6, яка відрізняється тим, що датчик є генератором статичного магнітного поля.
11. Добувна установка за будь-яким з пп. 1-9, яка відрізняється тим, що магніт, який створює магнітне поле або змінне магнітне поле в датчику, є постійним магнітом, зокрема супермагнітом.
12. Добувна установка за будь-яким з пп. 1-11, яка відрізняється тим, що магніт або магніти датчика утворюють магнітну систему, положення і/або орієнтацію якої можна змінювати відносно сенсора магнітного поля.
13. Добувна установка за будь-яким з пп. 1-6 або 10-12, яка відрізняється тим, що датчик має магнітну систему з декількома концентрично розташованими навколо середньої осі кільцевими магнітами, причому кільцева система виконана з можливістю повороту за допомогою сервоприводу навколо середньої осі і позиціонування переважно в різних положеннях повороту за допомогою сервоприводу.
14. Добувна установка за будь-яким з пп. 1-13, яка відрізняється тим, що добувна установка виконана у вигляді транспортера (10) зі скребками (11) в привідному ланцюзі (6), і кожна привідна станція має щонайменше один сенсорний пристрій, який призначений для відповідної гілки в напрямі руху ланцюга позаду ланцюгового зубчатого колеса.
15. Добувна установка за будь-яким з пп. 1-13, яка відрізняється тим, що добувна установка (10) забезпечена реверсивно рухомим привідним ланцюгом (106), і кожна привідна станція (101, 104) має два сенсорних пристрої (120), причому в кожній привідній станції один сенсорний пристрій (120) узгоджений з верхньою гілкою і один сенсорний пристрій (120) з нижньою гілкою.
16. Добувна установка за будь-яким з пп. 1-15, яка відрізняється тим, що з датчиком узгоджені на тому ж боці проходу сенсори магнітного поля для вимірювання реального магнітного поля, що створюється датчиком, як опорної величини.
17. Спосіб керування добувною установкою, зокрема для гірничих розробок, що містить першу привідну станцію (1) і другу привідну станцію (4), що переважно натягується за допомогою натяжного пристрою, встановлені в привідних станціях ланцюгові зубчаті колеса (3, 5), привідний ланцюг (6), що має ланцюгові ланки і приводиться в дію за допомогою ланцюгових зубчатих коліс, який проходить між ланцюговими зубчатими колесами у верхній гілці і в нижній гілці, щонайменше один сенсорний пристрій для визначення щонайменше одного стану привідного ланцюга у верхній гілці або в нижній гілці, і пристрій (50; 150) оцінки і керування, в який подають сигнали магнітного сенсорного пристрою, за допомогою якого керують станом висунення натяжного пристрою (7; 107) або приводами привідних станцій, який відрізняється тим, що кожний сенсорний пристрій (120) утворює магнітне поле, яке вимірюється за допомогою множини детекторів (23; 123) магнітного поля матриці (22; 122) детекторів, при цьому вимірювана гілка привідного ланцюга проводять між генератором магнітного поля і матрицею (22; 122) детекторів, і по зміні стану обміряного в матриці детекторів магнітного поля визначають стан привідного ланцюга.
18. Спосіб за п. 17, який відрізняється тим, що кожний детектор (23) магнітного поля матриці детекторів вимірює магнітне поле, що віддається датчиком і передається привідним ланцюгом, і по положенню одного або декількох вимірюючих максимальну силу магнітного поля детекторів змінного магнітного поля визначають стан ланцюга.
19. Спосіб за п. 17 або 18, який відрізняється тим, що датчик створює змінне магнітне поле, при цьому переважно за допомогою узгоджених з датчиком сенсорів змінного магнітного поля вимірюють реальне, що створюється датчиком, змінне магнітне поле, і подають як опорну величину в блок оцінки, і/або вимірюють кут повороту обертального приводу датчика і подають як опорну величину в блок оцінки.
20. Спосіб за п. 17 або 18, який відрізняється тим, що датчик має кільцеві магніти, які розташовані концентрично навколо середньої осі і утворюють кільцеву систему, яку повертають для утворення змінного магнітного поля.
21. Спосіб за будь-яким з пп. 17-20, який відрізняється тим, що в блоці оцінки і керування вимірюють параметри привідних двигунів привідних станцій, зокрема швидкості обертання, і в залежності від стану, що визначається, ланцюги ініціюють регулювання швидкості обертання.
22. Спосіб за будь-яким з пп. 17-21, який відрізняється тим, що після зупинення привідного ланцюга виконують калібрувальний прогін, в якому для кожної ланки ланцюга або для кожної скребачки визначають опорну величину для базового намагнічення, яку при роботі порівнюють з фактичною величиною, що визначається за допомогою матриці детекторів.
23. Спосіб за будь-яким з пп. 17-22, який відрізняється тим, що сигнали між сенсорними пристроями і блоком оцінки і керування передають по радіо.
24. Спосіб за будь-яким з пп. 17-23, який відрізняється тим, що добувна установка виконана за будь-яким з пп. 1-16.
Текст
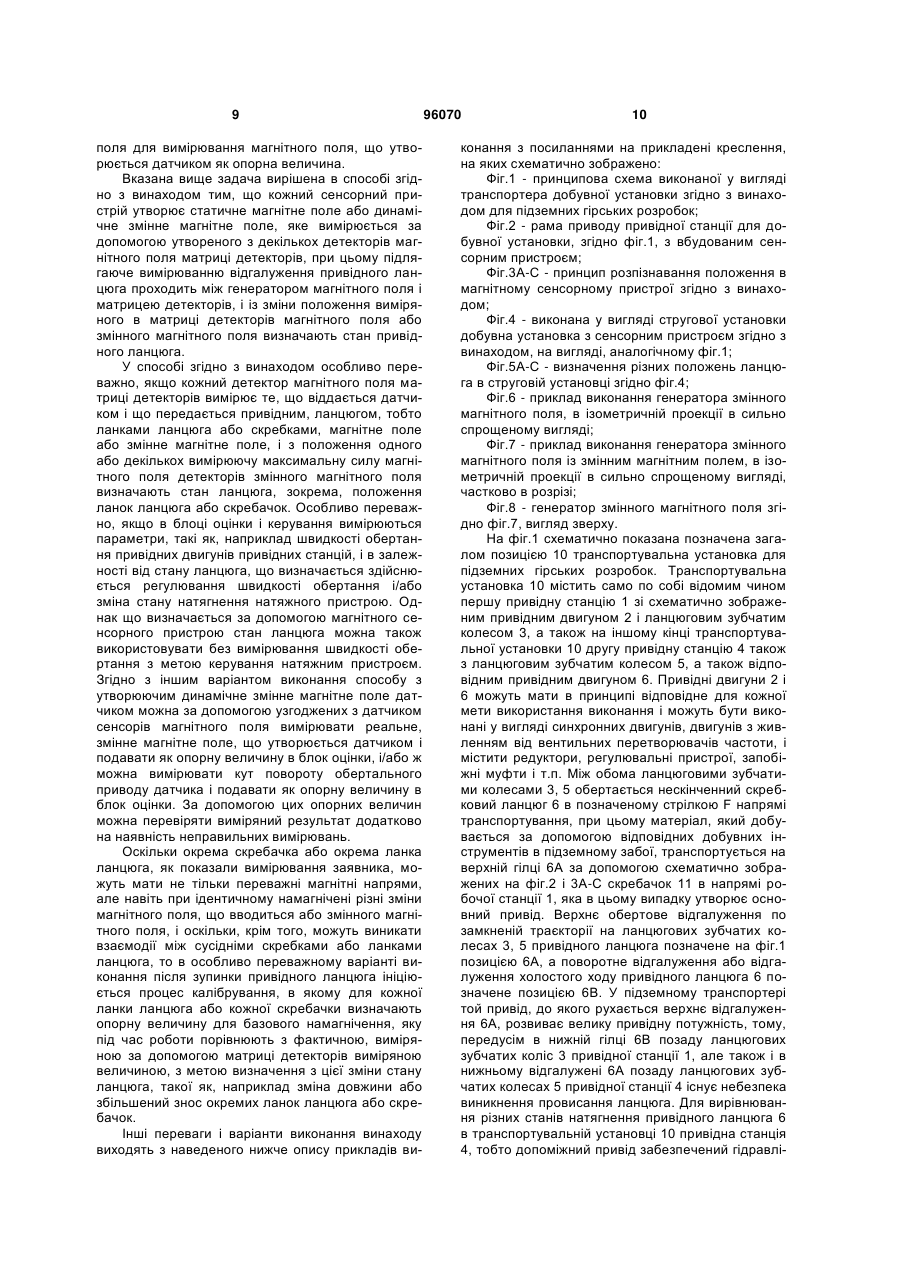
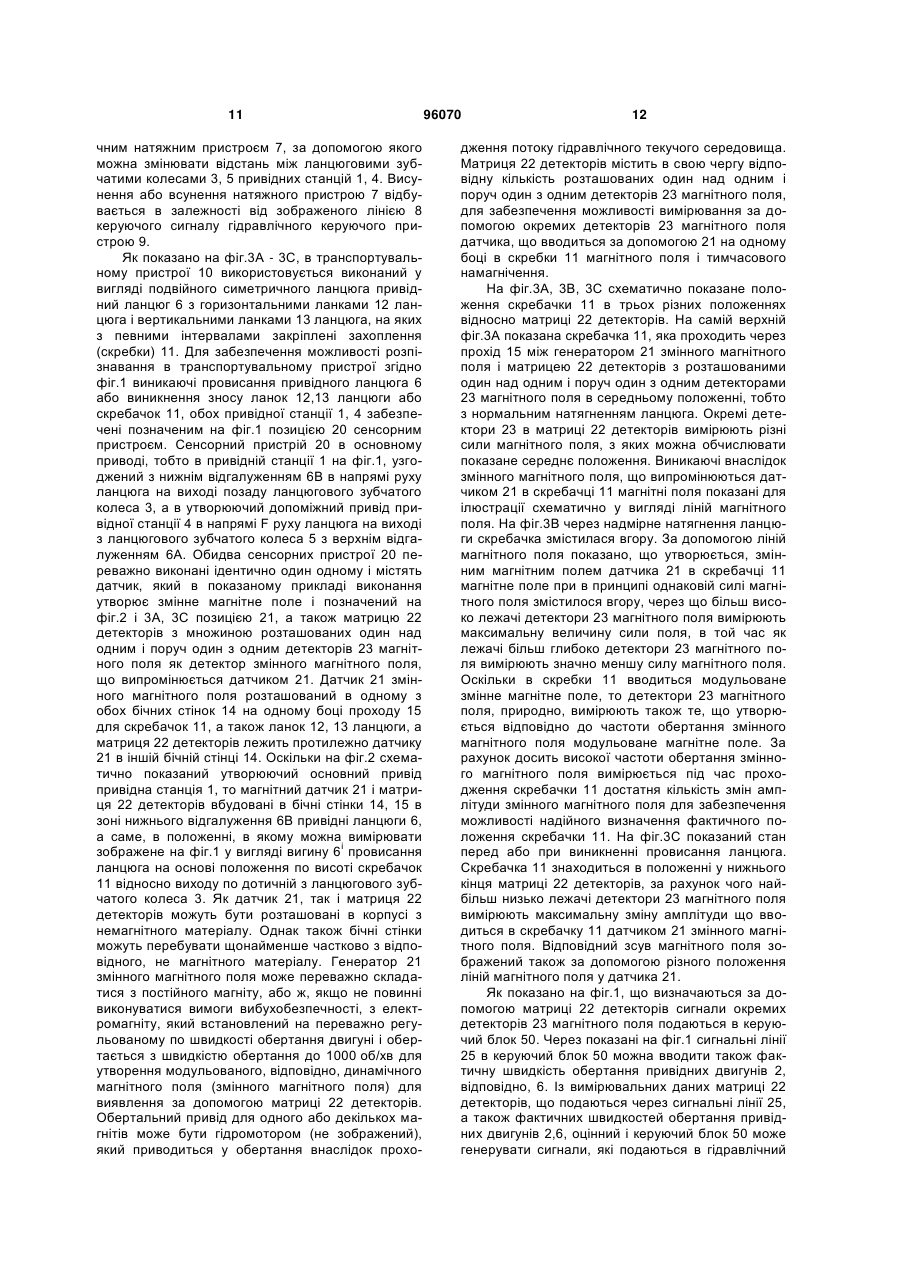
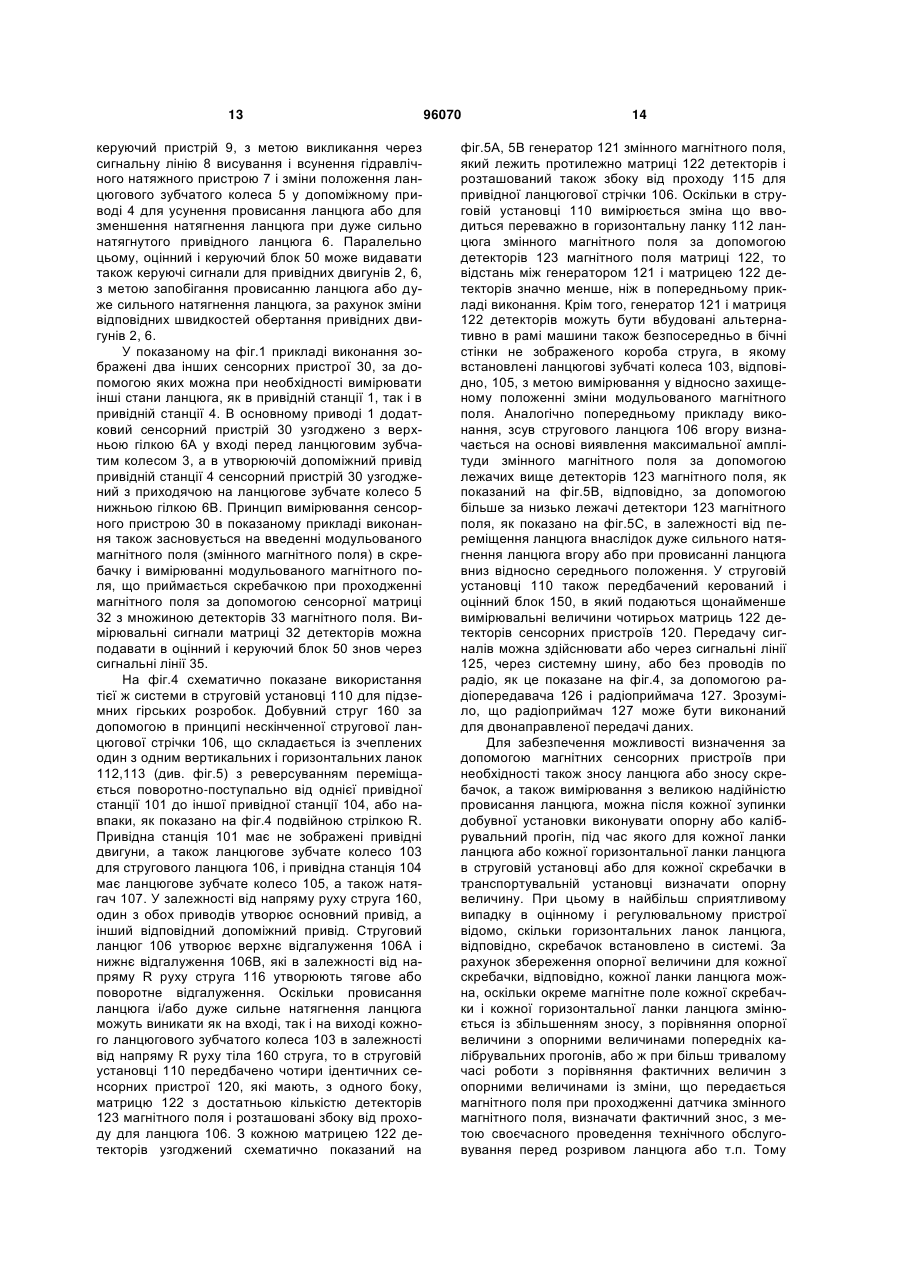
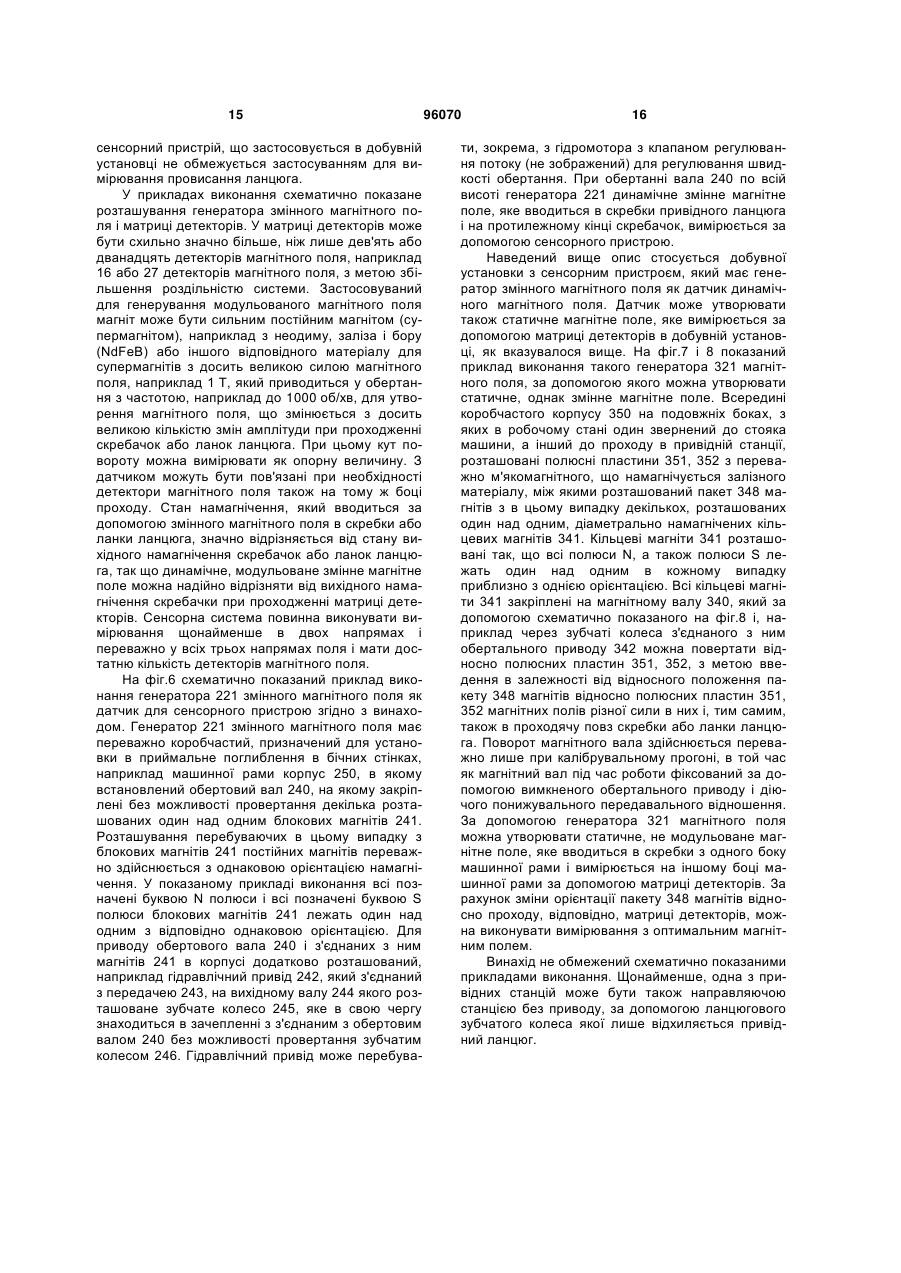
1. Добувна установка, зокрема для гірничих розробок, яка містить першу привідну станцію і другу привідну станцію, що переважно натягується за допомогою натяжного пристрою, встановлені в привідних станціях (1, 4; 101, 104) ланцюгові зубчаті колеса (2, 5; 102, 105), привідний ланцюг (6; 106), що має ланцюгові ланки і приводиться в дію за допомогою ланцюгових зубчатих коліс, який проходить між ланцюговими зубчатими колесами у верхній гілці і в нижній гілці, і щонайменше один сенсорний пристрій для визначення щонайменше одного стану привідного ланцюга у верхній гілці або в нижній гілці, яка відрізняється тим, що кожний сенсорний пристрій (20, 30; 120) має утворений генератором (21; 121) магнітного поля датчик і забезпечену множиною детекторів (23; 123) магнітного поля матрицю (22; 122) детекторів як детектор, причому детектор і датчик розташовані збоку від проходу (15; 115) для обмірюваної гілки привідного ланцюга (6; 106). 2. Добувна установка за п. 1, яка відрізняється тим, що детектор (22; 122) і датчик (21; 121) лежать протилежно один одному, при цьому матриця (22; 122) детекторів переважно проходить по висоті проходу (15; 115). 3. Добувна установка за п. 1 або 2, яка відрізняється тим, що матриця (22; 123) детекторів має множину детекторів (23) магнітного поля, які розташовані поруч один з одним і множину розташо 2 (19) 1 3 96070 4 шованими навколо середньої осі кільцевими магнітами, причому кільцева система виконана з можливістю повороту за допомогою сервоприводу навколо середньої осі і позиціонування переважно в різних положеннях повороту за допомогою сервоприводу. 14. Добувна установка за будь-яким з пп. 1-13, яка відрізняється тим, що добувна установка виконана у вигляді транспортера (10) зі скребками (11) в привідному ланцюзі (6), і кожна привідна станція має щонайменше один сенсорний пристрій, який призначений для відповідної гілки в напрямі руху ланцюга позаду ланцюгового зубчатого колеса. 15. Добувна установка за будь-яким з пп. 1-13, яка відрізняється тим, що добувна установка (10) забезпечена реверсивно рухомим привідним ланцюгом (106), і кожна привідна станція (101, 104) має два сенсорних пристрої (120), причому в кожній привідній станції один сенсорний пристрій (120) узгоджений з верхньою гілкою і один сенсорний пристрій (120) з нижньою гілкою. 16. Добувна установка за будь-яким з пп. 1-15, яка відрізняється тим, що з датчиком узгоджені на тому ж боці проходу сенсори магнітного поля для вимірювання реального магнітного поля, що створюється датчиком, як опорної величини. 17. Спосіб керування добувною установкою, зокрема для гірничих розробок, що містить першу привідну станцію (1) і другу привідну станцію (4), що переважно натягується за допомогою натяжного пристрою, встановлені в привідних станціях ланцюгові зубчаті колеса (3, 5), привідний ланцюг (6), що має ланцюгові ланки і приводиться в дію за допомогою ланцюгових зубчатих коліс, який проходить між ланцюговими зубчатими колесами у верхній гілці і в нижній гілці, щонайменше один сенсорний пристрій для визначення щонайменше одного стану привідного ланцюга у верхній гілці або в нижній гілці, і пристрій (50; 150) оцінки і керування, в який подають сигнали магнітного сенсорного пристрою, за допомогою якого керують станом висунення натяжного пристрою (7; 107) або приводами привідних станцій, який відрізняється тим, що кожний сенсорний пристрій (120) утворює магнітне поле, яке вимірюється за допомогою множини детекторів (23; 123) магнітного поля матриці (22; 122) детекторів, при цьому вимі рювана гілка привідного ланцюга проводять між генератором магнітного поля і матрицею (22; 122) детекторів, і по зміні стану обміряного в матриці детекторів магнітного поля визначають стан привідного ланцюга. 18. Спосіб за п. 17, який відрізняється тим, що кожний детектор (23) магнітного поля матриці детекторів вимірює магнітне поле, що віддається датчиком і передається привідним ланцюгом, і по положенню одного або декількох вимірюючих максимальну силу магнітного поля детекторів змінного магнітного поля визначають стан ланцюга. 19. Спосіб за п. 17 або 18, який відрізняється тим, що датчик створює змінне магнітне поле, при цьому переважно за допомогою узгоджених з датчиком сенсорів змінного магнітного поля вимірюють реальне, що створюється датчиком, змінне магнітне поле, і подають як опорну величину в блок оцінки, і/або вимірюють кут повороту обертального приводу датчика і подають як опорну величину в блок оцінки. 20. Спосіб за п. 17 або 18, який відрізняється тим, що датчик має кільцеві магніти, які розташовані концентрично навколо середньої осі і утворюють кільцеву систему, яку повертають для утворення змінного магнітного поля. 21. Спосіб за будь-яким з пп. 17-20, який відрізняється тим, що в блоці оцінки і керування вимірюють параметри привідних двигунів привідних станцій, зокрема швидкості обертання, і в залежності від стану, що визначається, ланцюги ініціюють регулювання швидкості обертання. 22. Спосіб за будь-яким з пп. 17-21, який відрізняється тим, що після зупинення привідного ланцюга виконують калібрувальний прогін, в якому для кожної ланки ланцюга або для кожної скребачки визначають опорну величину для базового намагнічення, яку при роботі порівнюють з фактичною величиною, що визначається за допомогою матриці детекторів. 23. Спосіб за будь-яким з пп. 17-22, який відрізняється тим, що сигнали між сенсорними пристроями і блоком оцінки і керування передають по радіо. 24. Спосіб за будь-яким з пп. 17-23, який відрізняється тим, що добувна установка виконана за будь-яким з пп. 1-16. Винахід стосується добувної установки, зокрема для гірських розробок, яка містить першу привідну станцію і другу привідну станцію, що переважно натягується за допомогою натяжного пристрою, встановлені в привідних станціях ланцюгові зубчаті колеса, що має ланцюгові ланки і що приводиться в дію і/або, який спрямовується за допомогою ланцюгових зубчатих коліс, що приводяться у обертання від двигуна, привідний ланцюг, який проходить між ланцюговими зубчатими колесами у верхньому відгалужені і в нижньому відгалужені, і щонайменше однин сенсорний пристрій для визначення щонайменше одного стану приві дного ланцюга у верхньому відгалужені або в нижньому відгалужені. Винахід стосується також способу керування добувною установкою, зокрема для гірських розробок, що містить першу привідну станцію і другу, що переважно натягується за допомогою натяжного пристрою, привідну станцію, встановлені в привідних станціях ланцюгові зубчаті колеса, що має ланцюгові ланки і що приводиться в дію за допомогою ланцюгових зубчатих коліс, що приводяться у обертання від двигуна, привідний ланцюг, який проходить між ланцюговими зубчатими колесами у верхньому відгалужені і в нижньому відгалужені щонайменше один сенсорний 5 пристрій для визначення щонайменше одного стану привідного ланцюга у верхньому відгалужені або в нижньому відгалужені, і керуючий пристрій, в який подаються сигнали сенсорного пристрою і який призначений для керування станом висунення натяжного пристрою і/або приводами привідних станцій. Для роботи добувної установки з рухомою по замкненій траєкторії або реверсивно працюючим привідним ланцюгом величезне значення має оцінка або перевірка за допомогою відповідних заходів стану привідного ланцюга і, зокрема, натягнення ланцюга. У принципі для цього вже запропоновані оптичні, електричні, магнітні, а також механічні сенсорні пристрої, які можуть постачати вимірювальні сигнали, з яких може виводитися стан натягнення ланцюга, а також на основі відповідних алгоритмів параметри керування для натяжного пристрою або ж для привідних двигунів привідних пристроїв. У DE 3406519 А1 пропонується використовувати магнітно працюючий сенсорний пристрій для магнітного вимірювання натягнення ланцюга в привідній станції, що натягується. Для цього в DE 3406519 пропонується генератор магнітного поля, який в напрямі руху ланцюга узгоджений з відгалуженням, що виходить з привідної станції. Передбачений для вимірювання натягнення ланцюгу у верхньому відгалужені генератор магнітного поля розташований в металевому листі дна, а передбачений для вимірювання натягнення ланцюгу в нижньому відгалужені генератор магнітного поля розташований в металевому листі дна привідної станції над нижнім відгалуженням, з метою вимірювання зміни магнітного поля, яке виникає внаслідок зміни відстані між підлягаючим вимірюванню ланцюгом і ланками ланцюга. Нарівні з провисанням ланцюга повинно здійснюватися також вимірювання відстані між скребками транспортерного ланцюга або ж змін відстані між ланками ланцюга в комбінації з регулюванням провисання ланцюга. Принцип вимірювання згідно DE 3406519 засновується на тому, що утворюється направлене магнітне поле, яке розбудовується за рахунок по-різному глибоко занурюваних ланок ланцюга в магнітне поле, при цьому зміни магнітного поля, що вимірюються, оцінюються метрологічно. Оскільки магнітний вимірювальний датчик, включно вимірювальний пристрій, розташований в металевому листі дна відгалуження, що виходить, то виникає великий знос, який сильно обмежує термін служби такої вимірювальної системи. Тому технічна реалізація відомої з DE 3406519 А1 системи для вимірювання провисання ланцюга, а також інших станів ланцюга не була доведена до серійного використання. Задачею винаходу є утворення добувної установки, а також способу керування добувною установкою, які забезпечують можливість надійного визначення стану привідного ланцюга за допомогою працюючого без контакту сенсорного пристрою і при високій надійності системи мають значно більш тривалий термін служби. Ця і інші задачі вирішені в добувній установці згідно з винаходом тим що кожний сенсорний при 96070 6 стрій має утворений генератором магнітного поля датчик і забезпечену множиною детекторів магнітного поля матрицю детекторів як детектор, при цьому детектор і датчик утворені, відповідно, позиціоновані збоку від проходу для підлягаючого вимірюванню відгалуження привідного ланцюга. Системотехнічна перевага добувної установки згідно з винаходом полягає в тому, що сенсорний пристрій вимірює за допомогою вимірювальних засобів не зміну магнітного поля через різну відстань ланок ланцюга від генератора магнітного поля, відповідно, детектора, а вимірює зміну положення, відповідно, зміна висоти скребачки або ланки ланцюга упоперек напряму руху привідного ланцюга. У добувній установці згідно з винаходом магнітне поле вводиться в привідний ланцюг, і для кожного детектора магнітного поля матриці детекторів визначається вимірювальний сигнал. Якщо положення ланки ланцюга або скребачки змінюється всередині сенсорного поля відносно його положення при попередньому проходженні або відносно заданого нульового положення, то з цього можна зробити висновок, чи знаходиться ланка ланцюга, відповідно, скребачка в зоні матриці детекторів далі вгору або вниз. Якщо одночасно вимірюється сигнал часу для кожної скребачки або кожної ланки ланцюга, то можна також виявляти різну відстань одна від одної ланок ланцюга або скребачок, за рахунок чого можна визначати також інші стани ланцюга, такі як, наприклад знос ланцюга, скручування ланцюга або т.п. Виконаний у вигляді матриці детекторів детектор і датчик магнітного поля можуть бути розташовані на одному і тому ж боці поруч один з одним. У переважному варіанті виконання детектор і датчик розташовані протилежно один одному, так що датчик вводить магнітне поле на одному боці в ланки ланцюга або скребки, а детектори магнітного поля матриці детекторів вимірюють те, що передається ланками ланцюга або скребками магнітне поле на іншому боці проходу. Для забезпечення можливості надійного виявлення, зокрема, провисань ланцюга, особливо переважно, якщо матриця детекторів з множиною детекторів проходить по висоті проходу. У особливо переважному варіанті виконання матриця детекторів має множину детекторів магнітного поля, що розташовані поруч один з одним для вимірювання в досить великій зоні що передається, відповідно, що проводиться далі підлягаючою вимірюванню ланкою ланцюга або скребачкою упоперек напряму проходження привідного ланцюга магнітного змінного поля. Для зменшення обчислювальних витрат, можна при цьому розташовувати детектори магнітного поля і стовпці з однаковими відстанями між ними. За рахунок двомірного розташування детекторів магнітного поля в матриці детекторів можна здійснювати вимірювання і розгортання магнітного поля, що передається за допомогою детекторів магнітного поля, які при необхідності вимірюють і визначають виключно горизонтальні складові магнітного поля, що передається. Особливо переважно, якщо матриця детекторів і/або генератор магнітного поля розташовані, зокрема, вбудовані в бічні стояки машинної рами 7 або бічні стінки короба ланцюгового зубчатого колеса привідної станції. У бічних стояках або в бічних стінках ні детектор, ні генератор магнітного поля не зазнають гідного згадці зносу, оскільки навіть при провисанні ланцюга або при виконанні робіт по технічному обслуговуванню ланки ланцюга або скребки не приходять в контакт з датчиком і детектором. У обох бічних стояках, відповідно, бічних стінках в більшості випадків є достатній конструктивний простір для розміщення матриці детекторів, а також датчика магнітного поля. Для запобігання взаємодії з утвореними машинною рамою навколишніми конструкціями, матриця детекторів і/або датчик переважно розташовані в корпусі або в несучій конструкції з немагнітного матеріалу. Матеріал може бути латунню, бронзою, міддю, алюмінієм, титаном, аустенітною сталлю або її сплавами, керамікою або пластмасою. Застосовувані матеріали відповідно, застосовувані сплави повинні відповідати всім вимогам вибухобезпечності (по метану, газам) для відповідної мети застосування. Згідно з одним варіантом виконання винаходу за допомогою генераторів магнітного поля можна утворювати статичне, постійне у часі магнітне поле. Згідно з переважним альтернативним варіантом виконання як датчики використовуються генератори змінного магнітного поля з метою утворення динамічного магнітного поля. За рахунок застосування генераторів змінного магнітного поля як датчики для магнітного сенсорного пристрою, для вимірювання застосовується модульоване магнітне поле, яке запобігає помилковим вимірюванням через різні магнітні переважні напрями підлягаючих вимірюванню ланок ланцюга або скребачок. Внаслідок проведених заявником досліджень було встановлено, що ланки ланцюга і встановлені в привідних ланцюгах транспортерів скребки (ланцюгові скребки) при намагніченні упоперек напряму руху привідного ланцюга мають явно різну густину магнітного потоку, а також посилення магнітного поля, що випромінюється магнітним генератором. При застосуванні генераторів змінного магнітного поля запобігається залежність від магнітного переважного напряму підлягаючої вимірюванню ланки ланцюга або скребачки, оскільки змінне магнітне поле вимірюється за допомогою детекторів в матриці детекторів. У особливо переважному варіанті виконання датчик, відповідно, генератор магнітного поля утворений при цьому обертовим або магнітом, що обертається. Швидкість обертання магніту може складати щонайменше 100 об./хв і аж до 1000 об/хв і більше. Крім того, магніт може переважно мати силу магнітного поля щонайменше 0,5 Т (Тесла). Обертовий або магніт, що обертається, може бути, зокрема постійним магнітом. При цьому датчик може містити один або ж декілька обертових або магнітів, що обертаються, відповідно, для досягнення високої частоти змінного магнітного поля також при низьких швидкостях обертання. Декілька постійних магнітів можуть бути розташовані, зокрема, у обертовому носії з немагнітного матеріалу. Для виконання вимог вибухобезпечності датчик змінного магнітного поля переважно має гідравлічний при 96070 8 від обертання, зокрема, гідромотор з клапаном регулювання потоку для регулювання швидкості обертання. Гідравлічна рідина може відгалужуватися з центральної підземної мережі гідравлічного постачання для прохідницьких щитів і переставних пристроїв із зменшенням рівня тиску за допомогою рівня регулювання тиску до допустимого для гідромотора тиску. У цьому випадку включення і вимкнення можна здійснювати за допомогою допоміжних багатоходових клапанів. Особливо переважно, якщо обертальний привід датчика узгоджений з датчиком кута повороту, для визначення фактичного кута повороту модулятора і передачі в блок оцінки і керування. У іншому варіанті виконання магніт або декілька магнітів датчика можуть утворювати магнітну систему, положення і/або орієнтацію якої можна змінювати відносно сенсора магнітного поля з метою утворення змінного, зокрема, по силі магнітного поля. Для цього датчик може переважно мати магнітну систему з декількома розташованими концентрично навколо середньої вісі кільцевими магнітами, при цьому кільцеві система виконана з можливістю повороту навколо центральної осі за допомогою сервоповідня. У цьому випадку особливо переважно, якщо магнітна система виконана з можливістю позиціонування в різних положеннях повороту за допомогою сервоповідня. Це можна забезпечувати, наприклад за допомогою самогальмівного сервоповідня з великим зменшенням швидкості обертання, який може перебувати, зокрема, з електричного сервоповідня, який знеструмлюється в бажаному положенні повороту. Добувна установка може бути виконана у вигляді транспортера зі скребками в привідному ланцюгу, і кожна привідна станція має в цьому випадку при необхідності лише один сенсорний пристрій, який узгоджений з гілкою, яка в напрямі руху ланцюга виходить з привідної станції позаду ланцюгового зубчатого колеса. Оскільки транспортери працюють з точки зору приводу і регулювання в більшості випадків з одним основним приводом і одним допоміжним приводом, то в цьому випадку один сенсорний пристрій може бути розташований в нижньому відгалужені основного приводу, а другий сенсорний пристрій - у верхньому відгалужені допоміжного приводу. Як альтернативне рішення, добувна установка може бути, наприклад струговою установкою з реверсивно пересувним привідним ланцюгом, при цьому кожна привідна станція має два сенсорних пристрої, з яких в кожній привідній станції один сенсорний пристрій передбачений або розташований у верхньому відгалужені, і один сенсорний пристрій - в нижньому відгалужені. При реверсивно рухомому привідному ланцюгу приводи привідних станцій повинні виконувати основну роботу в залежності від напряму руху добувної установки, так що провисання ланцюга може виникати в кожній привідній станції як перед ланцюговим зубчатим колесом, так і після ланцюгового зубчатого колеса. Однак також в транспортерах з кожною гілкою може бути узгоджений один сенсорний пристрій. Крім того, переважно датчику можуть відповідати на тому ж боці проходу сенсори магнітного 9 поля для вимірювання магнітного поля, що утворюється датчиком як опорна величина. Вказана вище задача вирішена в способі згідно з винаходом тим, що кожний сенсорний пристрій утворює статичне магнітне поле або динамічне змінне магнітне поле, яке вимірюється за допомогою утвореного з декількох детекторів магнітного поля матриці детекторів, при цьому підлягаюче вимірюванню відгалуження привідного ланцюга проходить між генератором магнітного поля і матрицею детекторів, і із зміни положення виміряного в матриці детекторів магнітного поля або змінного магнітного поля визначають стан привідного ланцюга. У способі згідно з винаходом особливо переважно, якщо кожний детектор магнітного поля матриці детекторів вимірює те, що віддається датчиком і що передається привідним, ланцюгом, тобто ланками ланцюга або скребками, магнітне поле або змінне магнітне поле, і з положення одного або декількох вимірюючу максимальну силу магнітного поля детекторів змінного магнітного поля визначають стан ланцюга, зокрема, положення ланок ланцюга або скребачок. Особливо переважно, якщо в блоці оцінки і керування вимірюються параметри, такі як, наприклад швидкості обертання привідних двигунів привідних станцій, і в залежності від стану ланцюга, що визначається здійснюється регулювання швидкості обертання і/або зміна стану натягнення натяжного пристрою. Однак що визначається за допомогою магнітного сенсорного пристрою стан ланцюга можна також використовувати без вимірювання швидкості обертання з метою керування натяжним пристроєм. Згідно з іншим варіантом виконання способу з утворюючим динамічне змінне магнітне поле датчиком можна за допомогою узгоджених з датчиком сенсорів магнітного поля вимірювати реальне, змінне магнітне поле, що утворюється датчиком і подавати як опорну величину в блок оцінки, і/або ж можна вимірювати кут повороту обертального приводу датчика і подавати як опорну величину в блок оцінки. За допомогою цих опорних величин можна перевіряти виміряний результат додатково на наявність неправильних вимірювань. Оскільки окрема скребачка або окрема ланка ланцюга, як показали вимірювання заявника, можуть мати не тільки переважні магнітні напрями, але навіть при ідентичному намагнічені різні зміни магнітного поля, що вводиться або змінного магнітного поля, і оскільки, крім того, можуть виникати взаємодії між сусідніми скребками або ланками ланцюга, то в особливо переважному варіанті виконання після зупинки привідного ланцюга ініціюється процес калібрування, в якому для кожної ланки ланцюга або кожної скребачки визначають опорну величину для базового намагнічення, яку під час роботи порівнюють з фактичною, виміряною за допомогою матриці детекторів виміряною величиною, з метою визначення з цієї зміни стану ланцюга, такої як, наприклад зміна довжини або збільшений знос окремих ланок ланцюга або скребачок. Інші переваги і варіанти виконання винаходу виходять з наведеного нижче опису прикладів ви 96070 10 конання з посиланнями на прикладені креслення, на яких схематично зображено: Фіг.1 - принципова схема виконаної у вигляді транспортера добувної установки згідно з винаходом для підземних гірських розробок; Фіг.2 - рама приводу привідної станції для добувної установки, згідно фіг.1, з вбудованим сенсорним пристроєм; Фіг.3А-С - принцип розпізнавання положення в магнітному сенсорному пристрої згідно з винаходом; Фіг.4 - виконана у вигляді стругової установки добувна установка з сенсорним пристроєм згідно з винаходом, на вигляді, аналогічному фіг.1; Фіг.5А-С - визначення різних положень ланцюга в струговій установці згідно фіг.4; Фіг.6 - приклад виконання генератора змінного магнітного поля, в ізометричній проекції в сильно спрощеному вигляді; Фіг.7 - приклад виконання генератора змінногомагнітного поля із змінним магнітним полем, в ізометричній проекції в сильно спрощеному вигляді, частково в розрізі; Фіг.8 - генератор змінного магнітного поля згідно фіг.7, вигляд зверху. На фіг.1 схематично показана позначена загалом позицією 10 транспортувальна установка для підземних гірських розробок. Транспортувальна установка 10 містить само по собі відомим чином першу привідну станцію 1 зі схематично зображеним привідним двигуном 2 і ланцюговим зубчатим колесом 3, а також на іншому кінці транспортувальної установки 10 другу привідну станцію 4 також з ланцюговим зубчатим колесом 5, а також відповідним привідним двигуном 6. Привідні двигуни 2 і 6 можуть мати в принципі відповідне для кожної мети використання виконання і можуть бути виконані у вигляді синхронних двигунів, двигунів з живленням від вентильних перетворювачів частоти, і містити редуктори, регулювальні пристрої, запобіжні муфти і т.п. Між обома ланцюговими зубчатими колесами 3, 5 обертається нескінченний скребковий ланцюг 6 в позначеному стрілкою F напрямі транспортування, при цьому матеріал, який добувається за допомогою відповідних добувних інструментів в підземному забої, транспортується на верхній гілці 6А за допомогою схематично зображених на фіг.2 і 3А-С скребачок 11 в напрямі робочої станції 1, яка в цьому випадку утворює основний привід. Верхнє обертове відгалуження по замкненій траєкторії на ланцюгових зубчатих колесах 3, 5 привідного ланцюга позначене на фіг.1 позицією 6А, а поворотне відгалуження або відгалуження холостого ходу привідного ланцюга 6 позначене позицією 6В. У підземному транспортері той привід, до якого рухається верхнє відгалуження 6А, розвиває велику привідну потужність, тому, передусім в нижній гілці 6В позаду ланцюгових зубчатих коліс 3 привідної станції 1, але також і в нижньому відгалужені 6А позаду ланцюгових зубчатих колесах 5 привідної станції 4 існує небезпека виникнення провисання ланцюга. Для вирівнювання різних станів натягнення привідного ланцюга 6 в транспортувальній установці 10 привідна станція 4, тобто допоміжний привід забезпечений гідравлі 11 чним натяжним пристроєм 7, за допомогою якого можна змінювати відстань між ланцюговими зубчатими колесами 3, 5 привідних станцій 1, 4. Висунення або всунення натяжного пристрою 7 відбувається в залежності від зображеного лінією 8 керуючого сигналу гідравлічного керуючого пристрою 9. Як показано на фіг.3А - 3С, в транспортувальному пристрої 10 використовується виконаний у вигляді подвійного симетричного ланцюга привідний ланцюг 6 з горизонтальними ланками 12 ланцюга і вертикальними ланками 13 ланцюга, на яких з певними інтервалами закріплені захоплення (скребки) 11. Для забезпечення можливості розпізнавання в транспортувальному пристрої згідно фіг.1 виникаючі провисання привідного ланцюга 6 або виникнення зносу ланок 12,13 ланцюги або скребачок 11, обох привідної станції 1, 4 забезпечені позначеним на фіг.1 позицією 20 сенсорним пристроєм. Сенсорний пристрій 20 в основному приводі, тобто в привідній станції 1 на фіг.1, узгоджений з нижнім відгалуженням 6В в напрямі руху ланцюга на виході позаду ланцюгового зубчатого колеса 3, а в утворюючий допоміжний привід привідної станції 4 в напрямі F руху ланцюга на виході з ланцюгового зубчатого колеса 5 з верхнім відгалуженням 6А. Обидва сенсорних пристрої 20 переважно виконані ідентично один одному і містять датчик, який в показаному прикладі виконання утворює змінне магнітне поле і позначений на фіг.2 і 3А, 3С позицією 21, а також матрицю 22 детекторів з множиною розташованих один над одним і поруч один з одним детекторів 23 магнітного поля як детектор змінного магнітного поля, що випромінюється датчиком 21. Датчик 21 змінного магнітного поля розташований в одному з обох бічних стінок 14 на одному боці проходу 15 для скребачок 11, а також ланок 12, 13 ланцюги, а матриця 22 детекторів лежить протилежно датчику 21 в іншій бічній стінці 14. Оскільки на фіг.2 схематично показаний утворюючий основний привід привідна станція 1, то магнітний датчик 21 і матриця 22 детекторів вбудовані в бічні стінки 14, 15 в зоні нижнього відгалуження 6В привідні ланцюги 6, а саме, в положенні, в якому можна вимірювати і зображене на фіг.1 у вигляді вигину 6 провисання ланцюга на основі положення по висоті скребачок 11 відносно виходу по дотичній з ланцюгового зубчатого колеса 3. Як датчик 21, так і матриця 22 детекторів можуть бути розташовані в корпусі з немагнітного матеріалу. Однак також бічні стінки можуть перебувати щонайменше частково з відповідного, не магнітного матеріалу. Генератор 21 змінного магнітного поля може переважно складатися з постійного магніту, або ж, якщо не повинні виконуватися вимоги вибухобезпечності, з електромагніту, який встановлений на переважно регульованому по швидкості обертання двигуні і обертається з швидкістю обертання до 1000 об/хв для утворення модульованого, відповідно, динамічного магнітного поля (змінного магнітного поля) для виявлення за допомогою матриці 22 детекторів. Обертальний привід для одного або декількох магнітів може бути гідромотором (не зображений), який приводиться у обертання внаслідок прохо 96070 12 дження потоку гідравлічного текучого середовища. Матриця 22 детекторів містить в свою чергу відповідну кількість розташованих один над одним і поруч один з одним детекторів 23 магнітного поля, для забезпечення можливості вимірювання за допомогою окремих детекторів 23 магнітного поля датчика, що вводиться за допомогою 21 на одному боці в скребки 11 магнітного поля і тимчасового намагнічення. На фіг.3А, 3В, 3С схематично показане положення скребачки 11 в трьох різних положеннях відносно матриці 22 детекторів. На самій верхній фіг.3А показана скребачка 11, яка проходить через прохід 15 між генератором 21 змінного магнітного поля і матрицею 22 детекторів з розташованими один над одним і поруч один з одним детекторами 23 магнітного поля в середньому положенні, тобто з нормальним натягненням ланцюга. Окремі детектори 23 в матриці 22 детекторів вимірюють різні сили магнітного поля, з яких можна обчислювати показане середнє положення. Виникаючі внаслідок змінного магнітного поля, що випромінюються датчиком 21 в скребачці 11 магнітні поля показані для ілюстрації схематично у вигляді ліній магнітного поля. На фіг.3В через надмірне натягнення ланцюги скребачка змістилася вгору. За допомогою ліній магнітного поля показано, що утворюється, змінним магнітним полем датчика 21 в скребачці 11 магнітне поле при в принципі однаковій силі магнітного поля змістилося вгору, через що більш високо лежачі детектори 23 магнітного поля вимірюють максимальну величину сили поля, в той час як лежачі більш глибоко детектори 23 магнітного поля вимірюють значно меншу силу магнітного поля. Оскільки в скребки 11 вводиться модульоване змінне магнітне поле, то детектори 23 магнітного поля, природно, вимірюють також те, що утворюється відповідно до частоти обертання змінного магнітного поля модульоване магнітне поле. За рахунок досить високої частоти обертання змінного магнітного поля вимірюється під час проходження скребачки 11 достатня кількість змін амплітуди змінного магнітного поля для забезпечення можливості надійного визначення фактичного положення скребачки 11. На фіг.3С показаний стан перед або при виникненні провисання ланцюга. Скребачка 11 знаходиться в положенні у нижнього кінця матриці 22 детекторів, за рахунок чого найбільш низько лежачі детектори 23 магнітного поля вимірюють максимальну зміну амплітуди що вводиться в скребачку 11 датчиком 21 змінного магнітного поля. Відповідний зсув магнітного поля зображений також за допомогою різного положення ліній магнітного поля у датчика 21. Як показано на фіг.1, що визначаються за допомогою матриці 22 детекторів сигнали окремих детекторів 23 магнітного поля подаються в керуючий блок 50. Через показані на фіг.1 сигнальні лінії 25 в керуючий блок 50 можна вводити також фактичну швидкість обертання привідних двигунів 2, відповідно, 6. Із вимірювальних даних матриці 22 детекторів, що подаються через сигнальні лінії 25, а також фактичних швидкостей обертання привідних двигунів 2,6, оцінний і керуючий блок 50 може генерувати сигнали, які подаються в гідравлічний 13 керуючий пристрій 9, з метою викликання через сигнальну лінію 8 висування і всунення гідравлічного натяжного пристрою 7 і зміни положення ланцюгового зубчатого колеса 5 у допоміжному приводі 4 для усунення провисання ланцюга або для зменшення натягнення ланцюга при дуже сильно натягнутого привідного ланцюга 6. Паралельно цьому, оцінний і керуючий блок 50 може видавати також керуючі сигнали для привідних двигунів 2, 6, з метою запобігання провисанню ланцюга або дуже сильного натягнення ланцюга, за рахунок зміни відповідних швидкостей обертання привідних двигунів 2, 6. У показаному на фіг.1 прикладі виконання зображені два інших сенсорних пристрої 30, за допомогою яких можна при необхідності вимірювати інші стани ланцюга, як в привідній станції 1, так і в привідній станції 4. В основному приводі 1 додатковий сенсорний пристрій 30 узгоджено з верхньою гілкою 6А у вході передланцюговим зубчатим колесом 3, а в утворюючій допоміжний привід привідній станції 4 сенсорний пристрій 30 узгоджений з приходячою на ланцюгове зубчате колесо 5 нижньою гілкою 6В. Принцип вимірювання сенсорного пристрою 30 в показаному прикладі виконання також засновується на введенні модульованого магнітного поля (змінного магнітного поля) в скребачку і вимірюванні модульованого магнітного поля, що приймається скребачкою при проходженні магнітного поля за допомогою сенсорної матриці 32 з множиною детекторів 33 магнітного поля. Вимірювальні сигнали матриці 32 детекторів можна подавати в оцінний і керуючий блок 50 знов через сигнальні лінії 35. На фіг.4 схематично показане використання тієї ж системи в струговій установці 110 для підземних гірських розробок. Добувний струг 160 за допомогою в принципі нескінченної стругової ланцюгової стрічки 106, що складається із зчеплених один з одним вертикальних і горизонтальних ланок 112,113 (див. фіг.5) з реверсуванням переміщається поворотно-поступально від однієї привідної станції 101 до іншої привідної станції 104, або навпаки, як показано на фіг.4 подвійною стрілкою R. Привідна станція 101 має не зображені привідні двигуни, а також ланцюгове зубчате колесо 103 для стругового ланцюга 106, і привідна станція 104 має ланцюгове зубчате колесо 105, а також натягач 107. У залежності від напряму руху струга 160, один з обох приводів утворює основний привід, а інший відповідний допоміжний привід. Струговий ланцюг 106 утворює верхнє відгалуження 106А і нижнє відгалуження 106В, які в залежності від напряму R руху струга 116 утворюють тягове або поворотне відгалуження. Оскільки провисання ланцюга і/або дуже сильне натягнення ланцюга можуть виникати як на вході, так і на виході кожного ланцюгового зубчатого колеса 103 в залежності від напряму R руху тіла 160 струга, то в струговій установці 110 передбачено чотири ідентичних сенсорних пристрої 120, які мають, з одного боку, матрицю 122 з достатньою кількістю детекторів 123 магнітного поля і розташовані збоку від проходу для ланцюга 106. З кожною матрицею 122 детекторів узгоджений схематично показаний на 96070 14 фіг.5А, 5В генератор 121 змінного магнітного поля, який лежить протилежно матриці 122 детекторів і розташований також збоку від проходу 115 для привідної ланцюгової стрічки 106. Оскільки в струговій установці 110 вимірюється зміна що вводиться переважно в горизонтальну ланку 112 ланцюга змінного магнітного поля за допомогою детекторів 123 магнітного поля матриці 122, то відстань між генератором 121 і матрицею 122 детекторів значно менше, ніж в попередньому прикладі виконання. Крім того, генератор 121 і матриця 122 детекторів можуть бути вбудовані альтернативно в рамі машини також безпосередньо в бічні стінки не зображеного короба струга, в якому встановлені ланцюгові зубчаті колеса 103, відповідно, 105, з метою вимірювання у відносно захищеному положенні зміни модульованого магнітного поля. Аналогічно попередньому прикладу виконання, зсув стругового ланцюга 106 вгору визначається на основі виявлення максимальної амплітуди змінного магнітного поля за допомогою лежачих вище детекторів 123 магнітного поля, як показаний на фіг.5В, відповідно, за допомогою більше за низько лежачі детектори 123 магнітного поля, як показано на фіг.5С, в залежності від переміщення ланцюга внаслідок дуже сильного натягнення ланцюга вгору або при провисанні ланцюга вниз відносно середнього положення. У струговій установці 110 також передбачений керований і оцінний блок 150, в який подаються щонайменше вимірювальні величини чотирьох матриць 122 детекторів сенсорних пристроїв 120. Передачу сигналів можна здійснювати або через сигнальні лінії 125, через системну шину, або без проводів по радіо, як це показане на фіг.4, за допомогою радіопередавача 126 і радіоприймача 127. Зрозуміло, що радіоприймач 127 може бути виконаний для двонаправленої передачі даних. Для забезпечення можливості визначення за допомогою магнітних сенсорних пристроїв при необхідності також зносу ланцюга або зносу скребачок, а також вимірювання з великою надійністю провисання ланцюга, можна після кожної зупинки добувної установки виконувати опорну або калібрувальний прогін, під час якого для кожної ланки ланцюга або кожної горизонтальної ланки ланцюга в струговій установці або для кожної скребачки в транспортувальній установці визначати опорну величину. При цьому в найбільш сприятливому випадку в оцінному і регулювальному пристрої відомо, скільки горизонтальних ланок ланцюга, відповідно, скребачок встановлено в системі. За рахунок збереження опорної величини для кожної скребачки, відповідно, кожної ланки ланцюга можна, оскільки окреме магнітне поле кожної скребачки і кожної горизонтальної ланки ланцюга змінюється із збільшенням зносу, з порівняння опорної величини з опорними величинами попередніх калібрувальних прогонів, або ж при більш тривалому часі роботи з порівняння фактичних величин з опорними величинами із зміни, що передається магнітного поля при проходженні датчика змінного магнітного поля, визначати фактичний знос, з метою своєчасного проведення технічного обслуговування перед розривом ланцюга або т.п. Тому 15 сенсорний пристрій, що застосовується в добувній установці не обмежується застосуванням для вимірювання провисання ланцюга. У прикладах виконання схематично показане розташування генератора змінного магнітного поля і матриці детекторів. У матриці детекторів може бути схильно значно більше, ніж лише дев'ять або дванадцять детекторів магнітного поля, наприклад 16 або 27 детекторів магнітного поля, з метою збільшення роздільністю системи. Застосовуваний для генерування модульованого магнітного поля магніт може бути сильним постійним магнітом (супермагнітом), наприклад з неодиму, заліза і бору (NdFeB) або іншого відповідного матеріалу для супермагнітів з досить великою силою магнітного поля, наприклад 1 Т, який приводиться у обертання з частотою, наприклад до 1000 об/хв, для утворення магнітного поля, що змінюється з досить великою кількістю змін амплітуди при проходженні скребачок або ланок ланцюга. При цьому кут повороту можна вимірювати як опорну величину. З датчиком можуть бути пов'язані при необхідності детектори магнітного поля також на тому ж боці проходу. Стан намагнічення, який вводиться за допомогою змінного магнітного поля в скребки або ланки ланцюга, значно відрізняється від стану вихідного намагнічення скребачок або ланок ланцюга, так що динамічне, модульоване змінне магнітне поле можна надійно відрізняти від вихідного намагнічення скребачки при проходженні матриці детекторів. Сенсорна система повинна виконувати вимірювання щонайменше в двох напрямах і переважно у всіх трьох напрямах поля і мати достатню кількість детекторів магнітного поля. На фіг.6 схематично показаний приклад виконання генератора 221 змінного магнітного поля як датчик для сенсорного пристрою згідно з винаходом. Генератор 221 змінного магнітного поля має переважно коробчастий, призначений для установки в приймальне поглиблення в бічних стінках, наприклад машинної рами корпус 250, в якому встановлений обертовий вал 240, на якому закріплені без можливості провертання декілька розташованих один над одним блокових магнітів 241. Розташування перебуваючих в цьому випадку з блокових магнітів 241 постійних магнітів переважно здійснюється з однаковою орієнтацією намагнічення. У показаному прикладі виконання всі позначені буквою N полюси і всі позначені буквою S полюси блокових магнітів 241 лежать один над одним з відповідно однаковою орієнтацією. Для приводу обертового вала 240 і з'єднаних з ним магнітів 241 в корпусі додатково розташований, наприклад гідравлічний привід 242, який з'єднаний з передачею 243, на вихідному валу 244 якого розташоване зубчате колесо 245, яке в свою чергу знаходиться в зачепленні з з'єднаним з обертовим валом 240 без можливості провертання зубчатим колесом 246. Гідравлічний привід може перебува 96070 16 ти, зокрема, з гідромотора з клапаном регулювання потоку (не зображений) для регулювання швидкості обертання. При обертанні вала 240 по всій висоті генератора 221 динамічне змінне магнітне поле, яке вводиться в скребки привідного ланцюга і на протилежному кінці скребачок, вимірюється за допомогою сенсорного пристрою. Наведений вище опис стосується добувної установки з сенсорним пристроєм, який має генератор змінного магнітного поля як датчик динамічного магнітного поля. Датчик може утворювати також статичне магнітне поле, яке вимірюється за допомогою матриці детекторів в добувній установці, як вказувалося вище. На фіг.7 і 8 показаний приклад виконання такого генератора 321 магнітного поля, за допомогою якого можна утворювати статичне, однак змінне магнітне поле. Всередині коробчастого корпусу 350 на подовжніх боках, з яких в робочому стані один звернений до стояка машини, а інший до проходу в привідній станції, розташовані полюсні пластини 351, 352 з переважно м'якомагнітного, що намагнічується залізного матеріалу, між якими розташований пакет 348 магнітів з в цьому випадку декількох, розташованих один над одним, діаметрально намагнічених кільцевих магнітів 341. Кільцеві магніти 341 розташовані так, що всі полюси N, а також полюси S лежать один над одним в кожному випадку приблизно з однією орієнтацією. Всі кільцеві магніти 341 закріплені на магнітному валу 340, який за допомогою схематично показаного на фіг.8 і, наприклад через зубчаті колеса з'єднаного з ним обертального приводу 342 можна повертати відносно полюсних пластин 351, 352, з метою введення в залежності від відносного положення пакету 348 магнітів відносно полюсних пластин 351, 352 магнітних полів різної сили в них і, тим самим, також в проходячу повз скребки або ланки ланцюга. Поворот магнітного вала здійснюється переважно лише при калібрувальному прогоні, в той час як магнітний вал під час роботи фіксований за допомогою вимкненого обертального приводу і діючого понижувального передавального відношення. За допомогою генератора 321 магнітного поля можна утворювати статичне, не модульоване магнітне поле, яке вводиться в скребки з одного боку машинної рами і вимірюється на іншому боці машинної рами за допомогою матриці детекторів. За рахунок зміни орієнтації пакету 348 магнітів відносно проходу, відповідно, матриці детекторів, можна виконувати вимірювання з оптимальним магнітним полем. Винахід не обмежений схематично показаними прикладами виконання. Щонайменше, одна з привідних станцій може бути також направляючою станцією без приводу, за допомогою ланцюгового зубчатого колеса якої лише відхиляється привідний ланцюг. 17 96070 18 19 Комп’ютерна верстка Л. Ціхановська 96070 Підписне 20 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюExtractive installation, in particular for mining works, and method for control of extractive installation
Автори англійськоюMerten, Gerhard, Wirtz, Jorg, Schurer, Karl-Heinz, Baumler, Manfred, Boker, Uwe
Назва патенту російськоюДобывающая установка, в частности для горных разработок, и способ управления добывающей установкой
Автори російськоюМертен Герхард, Виртц Йорг, Шюрер Карл-Хайнц, Боймлер Манфред, Бекер Уве
МПК / Мітки
МПК: B65G 23/44, E21C 29/00, E21F 13/06
Мітки: керування, спосіб, розробок, установкою, добувною, добувна, гірничих, установка, зокрема
Код посилання
<a href="https://ua.patents.su/10-96070-dobuvna-ustanovka-zokrema-dlya-girnichikh-rozrobok-i-sposib-keruvannya-dobuvnoyu-ustanovkoyu.html" target="_blank" rel="follow" title="База патентів України">Добувна установка, зокрема для гірничих розробок, і спосіб керування добувною установкою</a>
Спосіб керування холодильною установкою
Номер патенту: 3902
Опубліковано: 27.12.1994
Автор: Альохін Микола Борисович
МПК: F25B 49/00
Мітки: установкою, холодильною, керування, спосіб
Формула / Реферат:
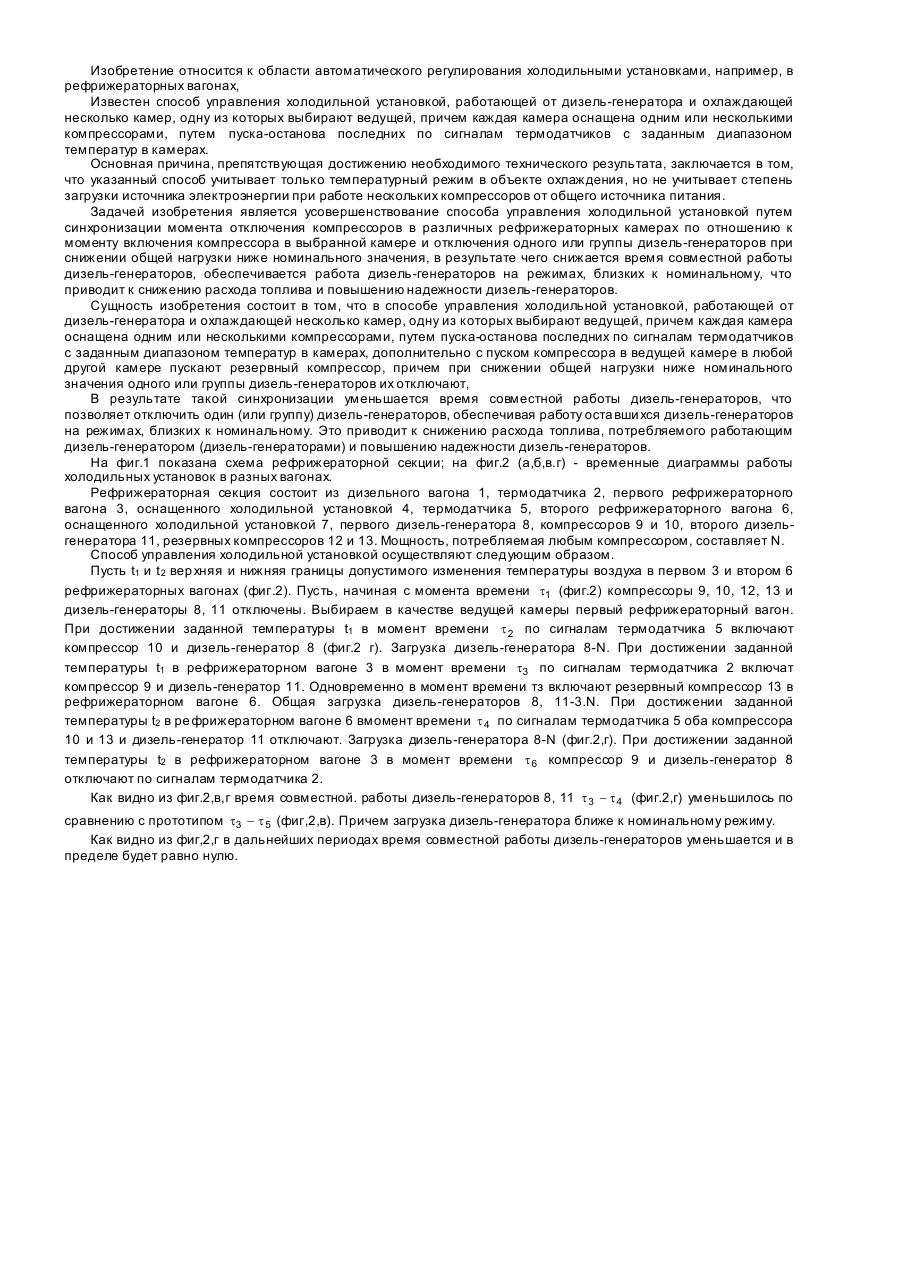
Способ управления холодильной установкой, работающей от дизель-генераторам охлаждающей несколько камер, одну из которых выбирают ведущей, причем каждая камера оснащена одним или несколькими компрессорами, путем пуска-останова последних по сигналам термодатчиков с заданным диапазоном температур в камерах, отличающийся тем, что одновременно с пуском компрессора в ведущей камере, в любой другой камере дополнительно пускают резервный компрессор,...
Спосіб керування холодильною установкою
Номер патенту: 3770
Опубліковано: 27.12.1994
Автор: Альохін Микола Борисович
МПК: F25B 49/00
Мітки: спосіб, установкою, керування, холодильною
Формула / Реферат:
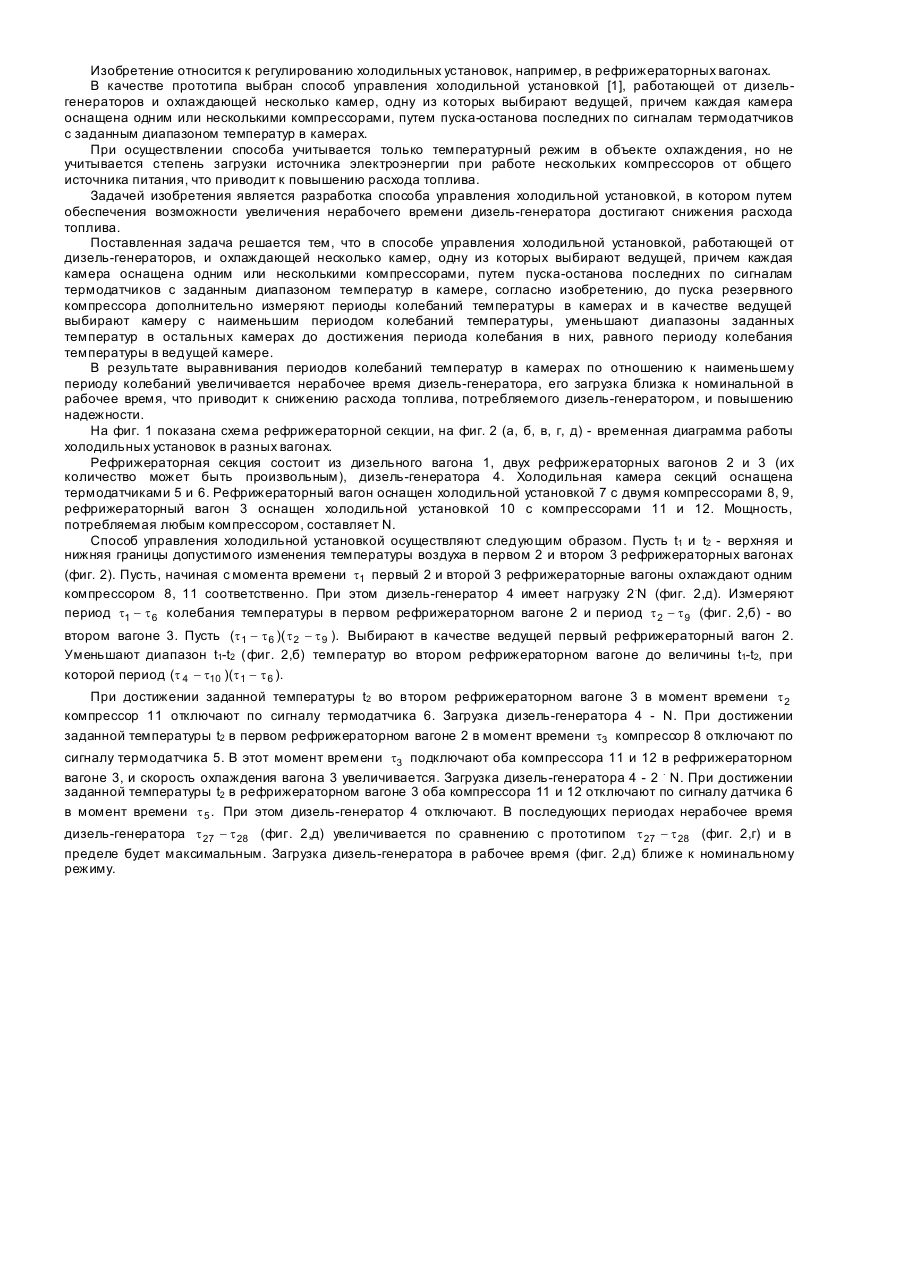
Способ управления холодильной установкой, работающей от дизель-генераторов, и охлаждающей несколько камер, одну из которых выбирают ведущей, причем каждая камера оснащена одним или несколькими компрессорами, путем пуска-останова последних по сигналам термодатчиков с заданным диапазоном температур в камерах, отличающийся тем, что до пуска резервного компрессора дополнительно измеряют периоды колебаний температуры в камерах и в качестве ведущей...
Спосіб керування холодильною установкою
Номер патенту: 3769
Опубліковано: 27.12.1994
Автор: Альохін Микола Борисович
МПК: F25B 49/00
Мітки: спосіб, керування, установкою, холодильною
Формула / Реферат:
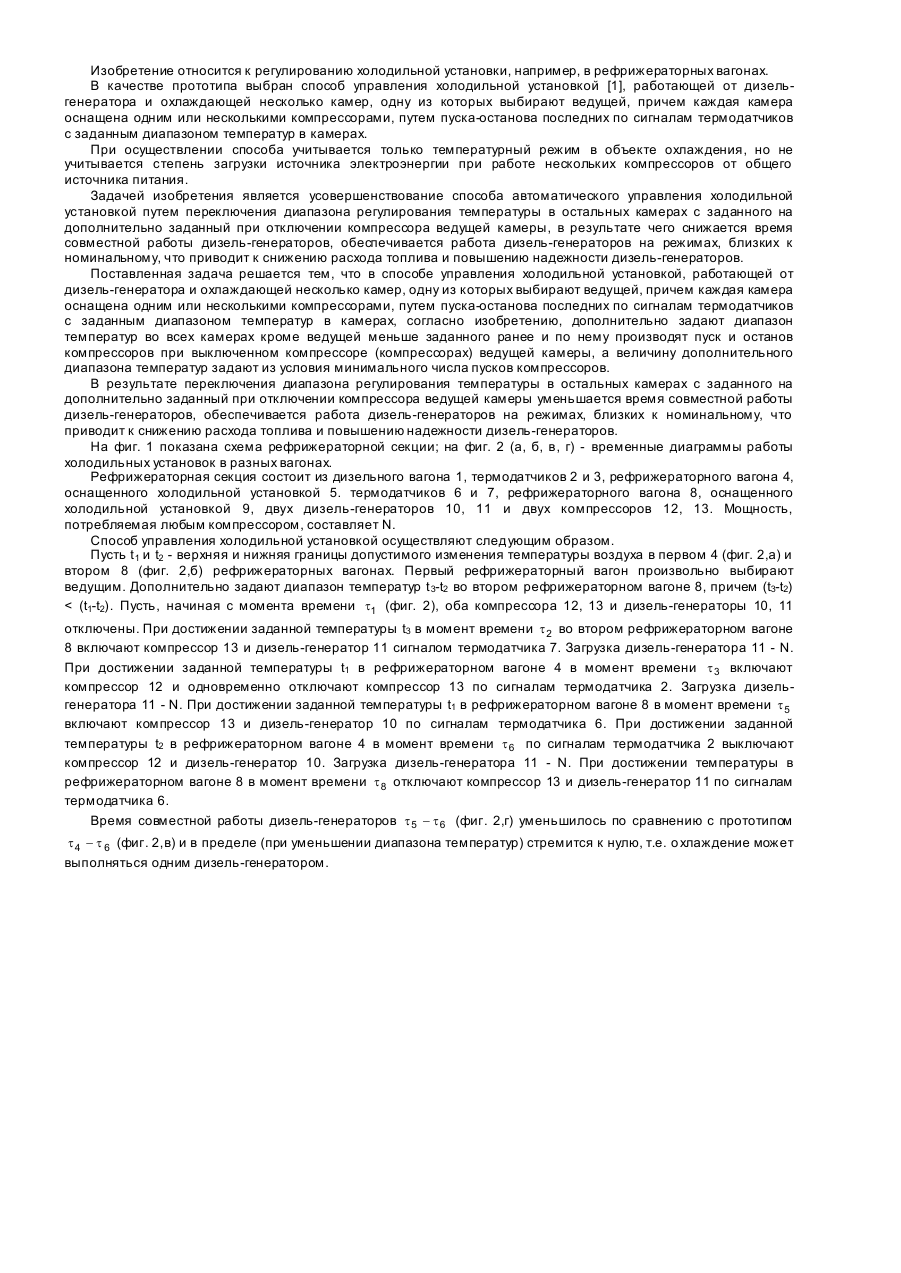
Способ управления холодильной установкой, работающей от дизель-генератора и охлаждающей несколько камер, одну из которых выбирают ведущей, причем каждая камера оснащена одним или несколькими компрессорами, путем пуска-останова последних по сигналам термодатчиков с заданным диапазоном температур в камерах, отличающийся тем, что дополнительно задают диапазон температур во всех камерах кроме ведущей меньше заданного ранее и по нему производят...
Спосіб керування холодильною установкою
Номер патенту: 3901
Опубліковано: 27.12.1994
Автор: Альохін Микола Борисович
МПК: F25B 49/00
Мітки: спосіб, керування, холодильною, установкою
Формула / Реферат:
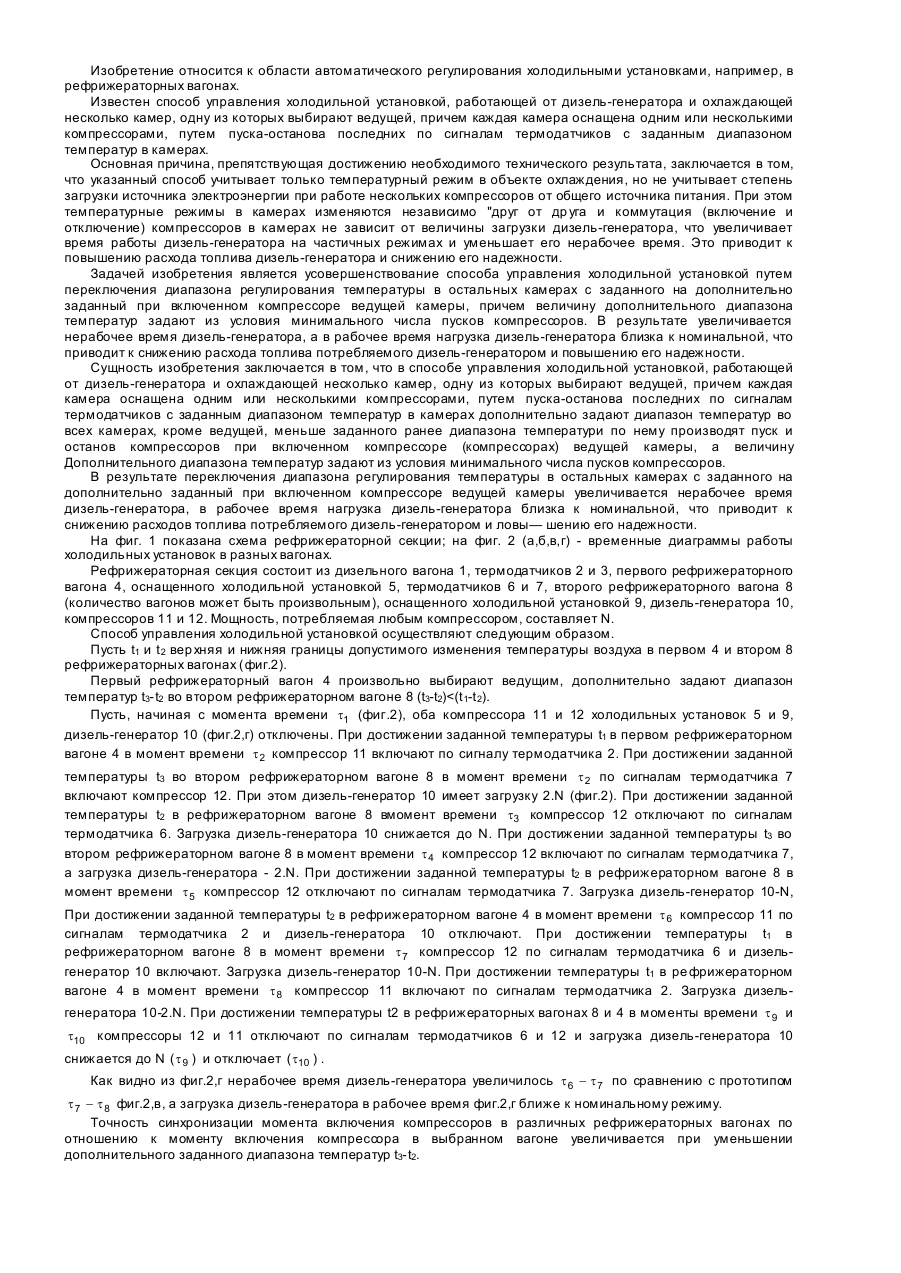
Способ управления холодильной установкой, работающей от дизель-генератора и охлаждающей несколько камер, одну из которых выбирают ведущей, причем каждая камера оснащена одним или несколькими компрессорами, путем пуска-останова последних по сигналам термодатчиков с заданным диапазоном температур в камерах, отличающийся тем, что дополнительно задают диапазон температур во всех камерах, кроме ведущей, меньше заданного· ранее диапазона температур...
Спосіб керування ректифікаційною установкою
Номер патенту: 83411
Опубліковано: 10.07.2008
Автор: Савінов Міхаіл Юрьєвіч
МПК: B01D 53/00, F25J 3/02
Мітки: установкою, ректифікаційною, керування, спосіб
Формула / Реферат:
Спосіб керування ректифікаційною установкою для переробляння стиснутих сумішей, який включає регулювання витрати первинної суміші в установку і живлення ректифікаційних колон, обладнаних конденсаторами-випаровувачами з проміжним теплоносієм у замкнутій порожнині і в концентраційній частині яких виконують випереджальні аналізи, також виконують регулювання тисків і кількості верхнього і нижнього продуктів, що виводять із колон, який...
Попередній патент: Спосіб одержання комплексу біологічно активних речовин з протизапальною, знеболюючою та гіпотензивною дією
Наступний патент: Пристрій для регулювання віддаленості знімних різців від валків прокатного стана
Випадковий патент: Спосіб контролю вірусних патогенів кріобанку