Спосіб визначення кривої намагнічування асинхронного двигуна

Формула / Реферат
Спосіб визначення кривої намагнічування асинхронного двигуна, який полягає в підключенні статора двигуна до мережі з регульованою напругою, зміні напруги від 0 до ![]() ., визначенні параметрів схеми заміщення асинхронного двигуна у ненасиченому режимі за відомими методами, зміні напруги від
., визначенні параметрів схеми заміщення асинхронного двигуна у ненасиченому режимі за відомими методами, зміні напруги від ![]() . до
. до ![]() . вимірювання миттєвих значень струму та напруги у режимі неробочого ходу, визначенні гармонійного складу сигналів струму, напруги, потужності, який відрізняється тим, що для визначення кривої намагнічування використовується апарат миттєвої потужності на основі розкладання залежностей струмів і напруг на косинусні і синусні складові гармонік, рівень яких не перевищує встановлений рівень (наприклад 5 %), за допомогою методу розрахунку нелінійних ланцюгів шляхом приведення їх до кіл зі змінними за часом параметрами отримують нелінійну залежність індуктивності:
. вимірювання миттєвих значень струму та напруги у режимі неробочого ходу, визначенні гармонійного складу сигналів струму, напруги, потужності, який відрізняється тим, що для визначення кривої намагнічування використовується апарат миттєвої потужності на основі розкладання залежностей струмів і напруг на косинусні і синусні складові гармонік, рівень яких не перевищує встановлений рівень (наприклад 5 %), за допомогою методу розрахунку нелінійних ланцюгів шляхом приведення їх до кіл зі змінними за часом параметрами отримують нелінійну залежність індуктивності:
![]() ,
,
де ![]() - постійна складова індуктивності, яка дорівнює індуктивності в ненасиченому стані,
- постійна складова індуктивності, яка дорівнює індуктивності в ненасиченому стані, ![]() - номер гармоніки індуктивності,
- номер гармоніки індуктивності, ![]() - косинусна складова індуктивності,
- косинусна складова індуктивності,
при протіканні струму намагнічування
![]() ,
,
де ![]() - номер гармоніки струму намагнічування;
- номер гармоніки струму намагнічування; ![]() - кутова швидкість;
- кутова швидкість; ![]() - час;
- час; ![]() - ортогональні складові струму намагнічування потужність на індуктивності з нелінійним виглядом характеристики:
- ортогональні складові струму намагнічування потужність на індуктивності з нелінійним виглядом характеристики:
![]()
або
![]() ,
,
що дорівнює:
 , де
, де
![]() - активний опір статора;
- активний опір статора; ![]() - активний опір контуру намагнічування;
- активний опір контуру намагнічування; ![]() - індуктивність статора;
- індуктивність статора; ![]() - залежність змінної складової індуктивності від часу;
- залежність змінної складової індуктивності від часу; ![]() - часова залежність напруги мережі живлення,
- часова залежність напруги мережі живлення, ![]() - часові залежності струму відповідно статора і контуру намагнічування або
- часові залежності струму відповідно статора і контуру намагнічування або
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
,
складанні системи рівнянь, при цьому постійна складова потужності ![]() формується з додатків, які не мають в своєму складі
формується з додатків, які не мають в своєму складі ![]() чи
чи ![]() та з додатків, які мають в своєму складі
та з додатків, які мають в своєму складі ![]() , величина, отримана при відніманні гармонік струму і індуктивності повинна бути рівною нулю; косинусна складова
, величина, отримана при відніманні гармонік струму і індуктивності повинна бути рівною нулю; косинусна складова ![]() формується з додатків, які мають складову
формується з додатків, які мають складову ![]() синусна складова
синусна складова ![]() формується з додатків, які мають складову
формується з додатків, які мають складову ![]() , індекс
, індекс ![]() , у складових потужності визначається значенням величини, яка отримана у дужках біля синусної чи косинусної складових, з якої визначаються невідомі апроксимаційні коефіцієнти
, у складових потужності визначається значенням величини, яка отримана у дужках біля синусної чи косинусної складових, з якої визначаються невідомі апроксимаційні коефіцієнти ![]() , необхідні для розрахунку залежності змінної індуктивності від часу:
, необхідні для розрахунку залежності змінної індуктивності від часу:
![]() ,
,
за допомогою якої розраховується залежність повної індуктивності контуру намагнічування: ![]() , на основі якої за допомогою відомого виразу отримуємо залежність
, на основі якої за допомогою відомого виразу отримуємо залежність ![]() , за результатами розрахунку залежностей
, за результатами розрахунку залежностей ![]() та
та ![]() при однаковій зміні параметра
при однаковій зміні параметра ![]() графічно визначається залежність потокозчеплення від струму
графічно визначається залежність потокозчеплення від струму ![]() , яка апроксимується математичним виразом для подальшого використання.
, яка апроксимується математичним виразом для подальшого використання.
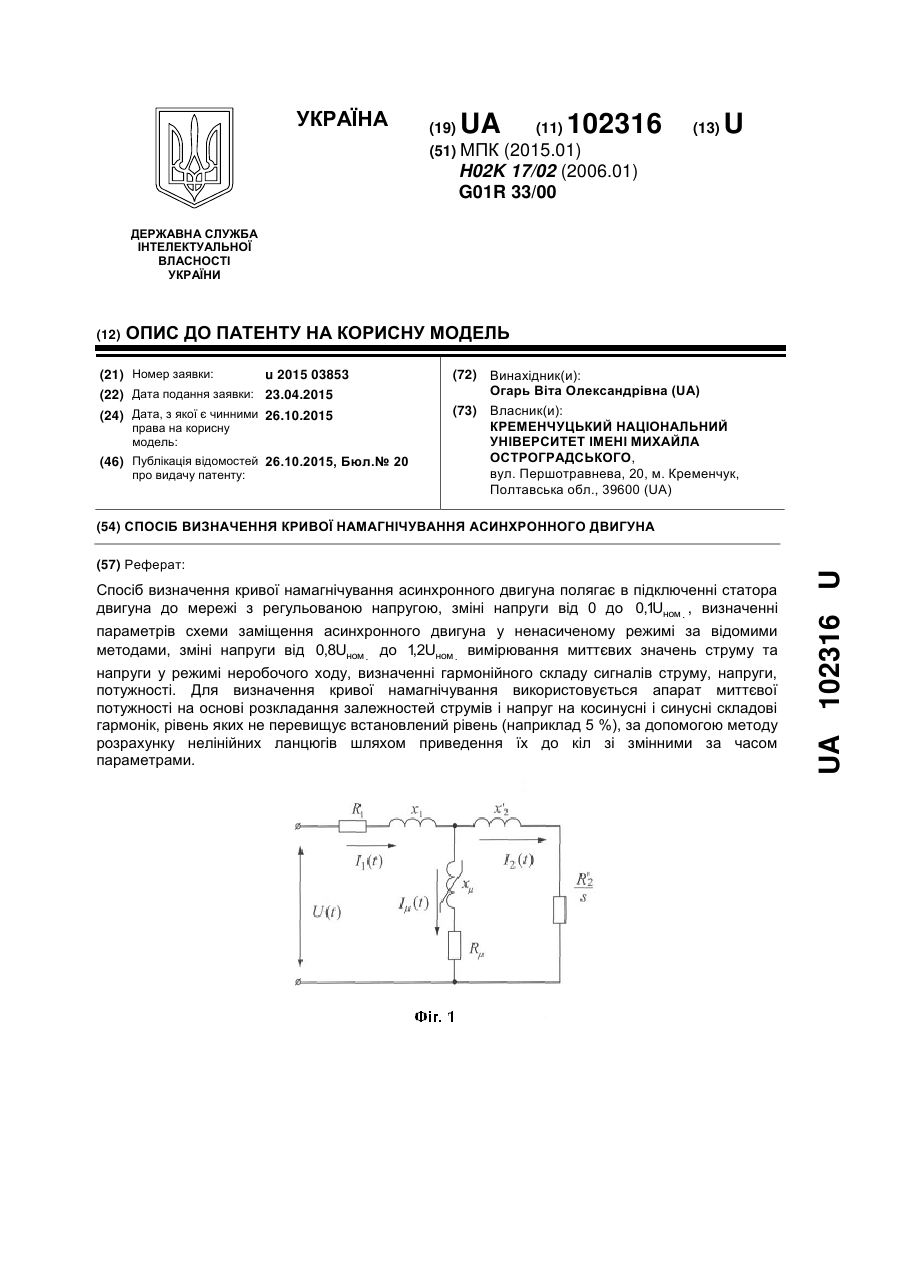
Текст
Реферат: Спосіб визначення кривої намагнічування асинхронного двигуна полягає в підключенні статора двигуна до мережі з регульованою напругою, зміні напруги від 0 до 0,1Uном . , визначенні параметрів схеми заміщення асинхронного двигуна у ненасиченому режимі за відомими методами, зміні напруги від 0,8Uном . до 1,2Uном . вимірювання миттєвих значень струму та напруги у режимі неробочого ходу, визначенні гармонійного складу сигналів струму, напруги, потужності. Для визначення кривої намагнічування використовується апарат миттєвої потужності на основі розкладання залежностей струмів і напруг на косинусні і синусні складові гармонік, рівень яких не перевищує встановлений рівень (наприклад 5 %), за допомогою методу розрахунку нелінійних ланцюгів шляхом приведення їх до кіл зі змінними за часом параметрами. UA 102316 U (54) СПОСІБ ВИЗНАЧЕННЯ КРИВОЇ НАМАГНІЧУВАННЯ АСИНХРОННОГО ДВИГУНА UA 102316 U UA 102316 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до електротехніки, а саме до систем ідентифікації і паспортизації асинхронних двигунів (АД) і може бути використана при: визначенні параметрів АД після ремонту з урахуванням погіршення властивостей сталі; урахуванні зміни втрат в сталі при збільшенні напруги мережі живлення; формуванні пускових характеристик (системи SoftStart), що базується на керуванні потоком в перехідному режимі; настроюванні регуляторів системи керування при реалізації векторного способу частотного управління; реалізації енергетичних систем асинхронних генераторів на базі АД з короткозамкненим або фазним ротором. Відомий спосіб визначення індуктивного опору асинхронних двигунів [Спосіб визначення індуктивного опору асинхронних двигунів. Авт. свідот. СРСР № 4025144/40-22: МПК G01R 31/34, Гаінцев Ю.В.] який забезпечує підвищення точності його визначення за рахунок врахування насичення. Дослідження проводять при пониженому значенні напруги живлення. При номінальному ковзанні вимірюють струм та споживану потужність. Визначають індуктивний опір з урахуванням витіснення, але без урахування насичення. Потім знімають дві точки навантаження при двох струмах та при однаковому ковзанні, визначають значення індуктивного опору. За формулою x квн х кв х к1н визначають значення індуктивного опору з урахуванням х кj1 насичення, де х квн - дійсне значення індуктивного опору, х кв - значення індуктивного опору без урахування насичення, х к1в - індуктивний опір при номінальному значенні струму, х кj1 індуктивний опір при деякому значенні струму I1 . Недоліками даного способу є: розрахунок лише індуктивного опору контуру намагнічування у насиченому стані без визначення кривої намагнічування; визначення індуктивного опору контуру намагнічування у насиченому стані для малого класу АД, а саме для машин великої потужності. Ознаки, які збігаються з суттєвими ознаками корисної моделі, що заявляється: визначення індуктивного опору без урахування насичення. Відомий спосіб визначення кривої намагнічування феромагнітного матеріалу [Спосіб визначення кривої намагнічування феромагнітного матеріалу. Пат. Російської Федерації № 2293344. МПК: G01R 33/14, Захаров В.А., Зембеков М.С.] полягає в тому, що зразок намагнічують в однорідному сторонньому магнітному полі, вимірюють сумарну магнітну індукцію в центральному розрізі тіла та будують залежність індукції від напруженості. Потім обчислюють внутрішнє поле та визначають криву намагнічування матеріалу. За виміряною залежністю визначають індукцію поля магнетика, яка відповідає насиченню матеріалу, за формулами визначають намагніченість насичення. При заданих значеннях індукції визначають відносну магнітну індукцію. До недоліків способу слід віднести наступне: визначення кривої намагнічування справедливе лише для розімкнених зразків феромагнітного матеріалу і не може бути використане для визначення залежності в АД; необхідність в спеціальних пристроях для вимірювання магнітної індукції. Ознаки, які збігаються з суттєвими ознаками корисної моделі, що заявляється: визначення кривої намагнічування досліджуваного об'єкта. Найбільш близьким до корисної моделі, що заявляється, та вибраним як прототип є технічне рішення [Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором та пристрій для його реалізації. Пат. України № 62492А МПК: G01R 33/44, Родькін Д.Й., Мартиненко В.О., Чорний О.П., Тараненко С.І., Калінов А.П., Аміров A.M.], яке полягає у підключенні статора двигуна до мережі з регульованою напругою, зміні напруги від 0 до 0,1Uном , визначенні параметрів схеми заміщення асинхронного двигуна у ненасиченому режимі за відомими методами, зміні напруги від 0,8Uном до 1 2Uном вимірювання миттєвих значень струму , та напруги у режимі неробочого ходу, визначенні гармонійного складу сигналів струму, напруги, потужності. За отриманими даними визначається розрахункове значення індуктивності насиченої сталі L c L н аam , де L н - індуктивність в ненасиченому стані, аam - коефіцієнти апроксимації, 55 визначається середнє значення індуктивності L cp L ac Lbc L cc L ac , L bc , L cc - значення індуктивності для фази А, фази В та фази С відповідно. 1 3 , де UA 102316 U 5 10 15 Недоліком способу є те, що для визначення параметрів використовується залежності балансу напруги, а не потужності, що є менш точним при застосуванні для рішення задач електротехніки, до яких належить і визначення кривої намагнічування. Ознаки, які збігаються з суттєвими ознаками корисної моделі, що заявляється: підключення статора двигуна до мережі з регульованою напругою; визначення параметрів схеми заміщення асинхронного двигуна у ненасиченому режимі; вимір напруги і струму трьох фаз АД; визначення гармонійних складових струму. В основі корисної моделі, що заявляється, поставлена задача визначення характеристики кривої намагнічування асинхронного двигуна для подальшої ідентифікації параметрів АД. Поставлена задача вирішується шляхом знаходження апроксимаційних коефіцієнтів на основі вимірювання значень струму та напруги, розкладанні їх на гармонічні складові та складання рівняння балансу миттєвої потужності. Технічний результат полягає у підвищенні точності визначення параметрів схеми заміщення, з урахуванням кривої намагнічування асинхронного двигуна, урахуванні зміни втрат в сталі при збільшенні напруги мережі живлення. Корисна модель пояснюється кресленням, де на фіг. 1 зображено схему заміщення АД з урахуванням нелінійності контуру намагнічування, на якій прийнято позначення: R1 - активний опір статора; 20 25 30 35 R '2 - приведений активний опір ротора; R - активний опір контуру намагнічування; s - ковзання АД; x 1 - індуктивний опір статора; x '2 - приведений індуктивний опір ротора; x - нелінійний індуктивний опір контуру намагнічування; Ut - часова залежність напруги мережі живлення; I1 t , I2 t , I t - часові залежності струму відповідно статора, ротора і контуру намагнічування. На фіг. 2 наведено експериментальні криві струму та напруги, отримані з використанням вимірювально-діагностичного комплексу, на якій прийнято позначення: Ut - часова залежність напруги мережі живлення; I1t - часова залежність струму статора. На фіг. 3 приведені графічні залежності переходу нелінійної індуктивності у індуктивність залежну від часу, на якій прийнято позначення: T - період сигналу; I - струм; L - індуктивність; Lt - індуктивність, що залежить від часу; LI - індуктивність, що залежить від струму; It струм, що протікає через нелінійну індуктивність. На фіг. 4 зображена схема заміщення асинхронного двигуна з представленням розкладання нелінійної індуктивності контуру намагнічування на постійну та змінну складові, на якій прийняті позначення: R1 - активний опір статора; R '2 - приведений активний опір ротора; R - активний опір контуру намагнічування; s - ковзання АД; L 1 - індуктивність статора; L 2 - індуктивність ротора; L 0 - індуктивність контуру намагнічування в ненасиченому стані; L зм t - залежність змінної складової індуктивності від часу; Ut - часова залежність напруги мережі живлення; I1 t , I2 t , I t - часові залежності струму відповідно статора, ротора і контуру намагнічування. 40 45 50 На фіг. 5 представлена послідовність дій з визначення кривої намагнічування АД на основі балансу потужностей. Спосіб реалізується наступним чином. Для визначення кривої намагнічування АД необхідне знання нелінійної залежності індуктивності контуру намагнічування від струму. За запропонованим методом для визначення нелінійної залежності LI вихідними даними є гармонійні складові напруги і струму, а також параметри схеми заміщення в ненасиченому стані. Визначення параметрів у ненасиченому стані проводиться на основі схеми заміщення (фіг. 1) при подачі напруги живлення 0.1Uном за відомими з літературних джерел методами, де Uном - номінальна напруга живлення. Гармонійні складові струму і напруги отримують наступним чином. З використанням вимірювально-діагностичного комплексу, до складу якого входять датчики напруги, струму, аналого-цифровий перетворювач, електронна обчислювальна машина для різних рівнів напруги вимірюємо миттєві значення напруги Ut та струму I1 ( t ) у режимі неробочого ходу (фіг. 2). За допомогою розкладання в ряд Фур'є отримуємо гармонійні складові сигналів напруги і струму. З літературних джерел відомий метод розрахунку нелінійних електричних ланцюгів шляхом приведення їх до кіл зі змінними за часом параметрами. При цьому нелінійна індуктивність 2 UA 102316 U 5 замінюється індуктивністю, яка залежить від часу. На фіг. 3 представлено, яким чином відбувається такого роду перехід. По даній залежності індуктивності від струму LI та залежності струму від часу It будується залежність індуктивності від часу Lt . На фіг. 3 показаний перехід точок 1,2,3,4,5 на кривій відповідно у точки 1',2',3',4',5' на кривій Lt . При протіканні струму намагнічування: I t I1am i cosmit I1bmi sinmit , (1) mi 1 де m i - номер гармоніки струму намагнічування; - кутова швидкість; t - час; I1am , I1bm i i ортогональні складові струму намагнічування, та нелінійній залежності індуктивності 10 15 L t L 0 L aqi cos2qit , (2) qi 1 де L 0 - постійна складова індуктивності, яка дорівнює індуктивності в ненасиченому стані, q1 - номер гармоніки індуктивності, L aqi - косинусна складова індуктивності потужність на індуктивності з нелінійним виглядом характеристики отримаємо: dI t dI t dL t dL t 2 PL t I t It Lt I t I t Lt I t . (3) dt dt dt dt Отримана залежність Lt описується наступним виразом: Lt L0 L2a cos2t L 4a cos4t ... L2na cos 4nt , (4) де n 1 . ; або у загальному вигляді: Lt L0 L зм t , (5) 20 де L зм t - залежність змінної складової індуктивності від часу. В загальному випадку для нелінійної залежності індуктивності від струму змінна складова індуктивності дорівнює: L зм t 25 30 35 L aqi cos2qit (6). qi 1 Схема заміщення асинхронного двигуна з розкладеною нелінійною індуктивністю контуру намагнічування на постійну та змінну складові представлена на фіг. 4. Наступним етапом визначення нелінійної залежності індуктивності від струму є складання рівняння балансу потужності. Потужність на індуктивному елементі L зм t наведеної схеми заміщення згідно з балансом потужності визначається як: PL t Pu t PL1 t PR1 t PL 0 t PR t , (7) де Pu t Ut I1( t ) - потужність джерела; PL1 t L1 dI1 t I1 t - потужність на індуктивності dt dI t статорного контуру; PL 0 t L 0 I t - потужність на постійній індуктивності контуру dt 2 2 намагнічування; PR1 t I1 t R1 , PR IR - потужність на активному опорі статора та контуру намагнічування відповідно. Значення напруги, виміряної за допомогою діагностично-вимірювального комплексу буде мати вигляд: Ut Uani cosnit Ubni sinnit , (8) ni 1 де ni - номер гармоніки напруги, Uan , Ubn - ортогональні складові напруги. i i Так як напруги та струми вимірюються у режимі неробочого ходу, струм намагнічування буде дорівнювати струму статора АД I1 t I t , складовими потужностями на індуктивності та 40 активному опорі ротора можна знехтувати. Миттєва потужність на індуктивності L зм t контуру намагнічування дорівнює: 3 UA 102316 U dI t dL t PL t I t I t зм L зм t . (9) dt dt Прирівнюючи праві частини рівнянь (7) і (9), отримаємо рівняння, у якому невідомими будуть апроксимаційні коефіцієнти L aq залежності L зм t . i 5 dI t 2 dI t 2 Ut I1 t L1 1 I1 t R1 L 0 IR dt dt . (10) dL зм t dI t I t I t L зм t dt dt Враховуючи залежності (1), (6) та (8) рівняння (10) буде мати вигляд: 1 1 1 2 2 2 ( R1Ibmi RIbmi R1Iami Ibmi sin2mit L 0miIami sin2mit 2 2 2 mi 1ni 1 1 1 2 2 L 0mi Ibm i sin2mi t R Iam i Ibm i sin2mi t R1Iam i 2 2 1 1 Iam i Uan i cost mi ni Ibm i Ubn i cost mi ni 2 2 1 1 2 Ibm i Uan i sint mi ni Ibm i Uan i sint mi ni R1Iam i mi t 2 2 1 2 2 2 R1Ibm i mi t 2L 0Iam i Ibm i mi2 2 R Ibm i mi t L1mi Ibm i sin2mi t 2 1 1 2 2 R Iam i mi t L1mi Iam i sin2mi t Iam i Uan i cost mi ni 2 2 1 2 2 2L1mi tIam i Ibm i Iam i Ubn i sint mi ni 2 1 1 1 2 Ibm i Ubn i cost mi ni R Iam i Iam i Ubn i sint mi ni 2 2 2 1 2 q jL aqjIami sin 2q j t 2 q j 1mi 1 10 15 2 q jL aqjIami sin2q j 2mi t sin2q j 2mi t 2q jL aqjIami Ibmi cos2q j 2mi t cos2q j t 2 2 q jL aqjIbmi sin2q j t q jL aqjIbmi sin2q j 2mi t sin2q j 2mi t 2q jL aqjIami Ibmi cos2q j t cos2q j 2mi t 20 1 m jL 0Iamj Iami sinm j mi t sinm j mi t 2 m j 1mi 1 m jL 0Ibmj Iami cosm j mi t cosm j mi t m jL 0Ibmj Ibmi sinmi m j t sinmi m j t m jL 0Iamj Iami cosm j mi t cosm j mi t 1 m jL aqiIamj Iami sinm j 2qi mi t sinm j 2qi mi t 4 m j 1mi 1 qi 1 m jL aqiIamj Ibmi cosm j 2qi mi t cosm j 2qi mi t m jL aqiIamj Ibmi cosm j 2qi mi t cosm j 2qi mi t m jL aqiIbmj Iami cos2qi m j mi t cos2qi m j mi t m jL aqiIbmj Iami cos2qi m j mi t cos2qi m j mi t m jL aqiIbmj Ibmi sinmi 2qi m j t sinmi 2qi m j t m jL aqiIbmj Ibmi sinmi 2qi m j t sinmi 2qi m j t , m jL aqiIamj Iami sinm j 2qi mi t sinm j 2qi mi t 25 30 (11) 4 UA 102316 U де m j - гармоніки похідної струму, які враховують різночастотні компоненти потужності. Систему рівнянь для знаходження невідомих апроксимаційних коефіцієнтів отримуємо з рівняння (11) для гармонік, рівень яких перевищує 5 % від рівня першої гармоніки струму. При цьому слід враховувати, що постійна складова потужності P0 формується з додатків, які 5 не мають в своєму складі " cost " чи " sint " та з додатків, які мають в своєму складі " cost " , при цьому величина, отримана при відніманні гармонік струму і індуктивності повинна бути рівною нулю. Косинусна складова Pak формується з додатків, які мають складову i 10 15 " cost " . Синусна складова Pbk i формується з додатків, які мають складову " sint " . Індекс k i у складових потужності буде визначатися значенням величини, яка отримана у дужках біля синусної чи косинусної складових. Знайшовши апроксимаційні коефіцієнти, визначаємо залежність L зм t за (6), та повну індуктивність за виразом (5). При відомому струмі контуру намагнічування, який протікає по ланцюгу I t та індуктивності Lt , отримуємо залежність LI . Тоді, криву намагнічування у вигляді залежності потокозчеплення від струму I отримуємо як t f It Визначену залежність I апроксимуємо математичним виразом для подальшого використання при вирішенні задач електротехніки і електромеханіки. Послідовність дій по визначенню кривої намагнічування приведена на фіг. 5. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 Спосіб визначення кривої намагнічування асинхронного двигуна, який полягає в підключенні статора двигуна до мережі з регульованою напругою, зміні напруги від 0 до 0,1Uном . , визначенні параметрів схеми заміщення асинхронного двигуна у ненасиченому режимі за відомими методами, зміні напруги від 0,8Uном . до 1,2Uном . вимірювання миттєвих значень струму та 30 напруги у режимі неробочого ходу, визначенні гармонійного складу сигналів струму, напруги, потужності, який відрізняється тим, що для визначення кривої намагнічування використовується апарат миттєвої потужності на основі розкладання залежностей струмів і напруг на косинусні і синусні складові гармонік, рівень яких не перевищує встановлений рівень (наприклад 5 %), за допомогою методу розрахунку нелінійних ланцюгів шляхом приведення їх до кіл зі змінними за часом параметрами отримують нелінійну залежність індуктивності: L t L 0 35 L aqi cos2qit , qi 1 де L 0 - постійна складова індуктивності, яка дорівнює індуктивності в ненасиченому стані, qi номер гармоніки індуктивності, L aqi - косинусна складова індуктивності, при протіканні струму намагнічування I t I1am i cosmit I1bmi sinmit , mi 1 де m i - номер гармоніки струму намагнічування; - кутова швидкість; t - час; I1ami , I1bmi 40 ортогональні складові струму намагнічування потужність на індуктивності з нелінійним виглядом характеристики: dI t dI t dL t dL t 2 PL t I t It Lt I t I t Lt I t dt dt dt dt або PL t Pu t PL1 t PR1 t PL 0 t PR t , 45 що дорівнює: 5 UA 102316 U dI1 t 2 dI t 2 I1 t R1 L 0 IR dt dt , де dL t dI t I t I t зм L зм t dt dt R1 - активний опір статора; R - активний опір контуру намагнічування; L 1 - індуктивність Ut I1 t L1 статора; L зм t - залежність змінної складової індуктивності від часу; Ut - часова залежність напруги мережі живлення, I1 t , I t - часові залежності струму відповідно статора і контуру 5 намагнічування або 1 1 1 2 2 2 ( R1Ibmi RIbmi R1Iami Ibmi sin2mit L 0miIami sin2mit 2 2 2 mi 1ni 1 1 1 2 2 L 0mi Ibm i sin2mi t R Iam i Ibm i sin2mi t R1Iam i 2 2 1 1 Iam i Uan i cost mi ni Ibm i Ubn i cost mi ni 2 2 1 1 2 Ibm i Uan i sint mi ni Ibm i Uan i sint mi ni R1Iam i mi t 2 2 1 2 2 2 2 2 R1Ibm i mi t 2L 0Iam i Ibm i mi R Ibm i mi t L1mi Ibm i sin2mi t 2 1 1 2 2 R Iam i mi t L1mi Iam i sin2mi t Iami Uan i cost mi ni 2 2 1 2L1mi2 2 tIam i Ibm i Iam i Ubn i sint mi ni 2 1 1 1 2 Ibm i Ubn i cost mi ni R Iam i Iam i Ubn i sint mi ni 2 2 2 1 2 q jL aqjIami sin 2q j t 2 q j 1mi 1 10 15 2 q jL aqjIami sin2q j 2mi t sin2q j 2mi t 2q jL aqjIami Ibmi cos2q j 2mi t cos2q j t 2 2 q jL aqjIbmi sin2q j t q jL aqjIbmi sin2q j 2mi t sin2q j 2mi t 2q jL aqjIami Ibmi cos2q j t cos2q j 2mi t 20 1 m jL 0Iamj Iami sinm j mi t sinm j mi t 2 m j 1mi 1 m jL 0Ibmj Iami cosm j mi t cosm j mi t m jL 0Ibmj Ibmi sinmi m j t sinmi m j t m jL 0Iamj Iami cosm j mi t cosm j mi t 1 m jL aqiIamj Iami sinm j 2qi mi t sinm j 2qi mi t 4 m j 1mi 1 qi 1 m jL aqiIamj Ibmi cosm j 2qi mi t cosm j 2qi mi t m jL aqiIamj Ibmi cosm j 2qi mi t cosm j 2qi mi t m jL aqiIbmj Iami cos2qi m j mi t cos2qi m j mi t m jL aqiIbmj Iami cos2qi m j mi t cos2qi m j mi t m jL aqiIbmj Ibmi sinmi 2qi m j t sinmi 2qi m j t m jL aqiIbmj Ibmi sinmi 2qi m j t sinmi 2qi m j t , m jL aqiIamj Iami sinm j 2qi mi t sinm j 2qi mi t 25 30 6 UA 102316 U складанні системи рівнянь, при цьому постійна складова потужності P0 формується з додатків, які не мають в своєму складі " cost " чи " sint " та з додатків, які мають в своєму складі " cost " , величина, отримана при відніманні гармонік струму і індуктивності повинна бути рівною нулю; косинусна складова Pak i формується з додатків, які мають складову " cost " 5 синусна складова Pbk i формується з додатків, які мають складову " sint " , індекс k , у складових потужності визначається значенням величини, яка отримана у дужках біля синусної чи косинусної складових, з якої визначаються невідомі апроксимаційні коефіцієнти L aqi , необхідні для розрахунку залежності змінної індуктивності від часу: L зм t 10 L aqi cos2qit , qi 1 за допомогою якої розраховується залежність повної індуктивності контуру намагнічування: Lt L0 L зм t , на основі якої за допомогою відомого виразу отримуємо залежність t Lt I ( t ) , за результатами розрахунку залежностей t та It при однаковій зміні параметра t графічно визначається залежність потокозчеплення від струму апроксимується математичним виразом для подальшого використання. 15 7 I , яка UA 102316 U 8 UA 102316 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining magnetization curve of the induction motor
Автори англійськоюOhar Vita Oleksandrivna
Назва патенту російськоюСпособ определения кривой намагничивания асинхронного двигателя
Автори російськоюОгарь Вита Александровна
МПК / Мітки
МПК: G01R 33/00, H02K 17/02
Мітки: асинхронного, намагнічування, визначення, спосіб, кривої, двигуна
Код посилання
<a href="https://ua.patents.su/11-102316-sposib-viznachennya-krivo-namagnichuvannya-asinkhronnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кривої намагнічування асинхронного двигуна</a>
Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги
Номер патенту: 91641
Опубліковано: 10.07.2014
Автори: Рєзнік Дмитро Володимирович, Ромашихін Юрій Володимирович, Ткаченко Юрій Вікторович, Родькін Дмитро Йосипович, Потапов Антон Леонідович
МПК: G01R 27/08
Мітки: двигуна, напруги, параметрів, асинхронного, джерела, синусоїдної, спосіб, визначення, живленні
Формула / Реферат:
Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги, який полягає у підключенні дослідного асинхронного двигуна до джерела живлення, з використанням частот напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити

Номер патенту: 80683
Опубліковано: 10.06.2013
Автори: Гаврилець Галина Олегівна, Родькін Дмитро Йосипович, Перекрест Андрій Леонідович
МПК: G01M 15/05
Мітки: кріплення, визначення, стану, фундаментної, плити, двигуна, спосіб, асинхронного
Формула / Реферат:
1. Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити, що полягає в підключенні двигуна до мережі, вимірюванні вібрацій двигуна в двох площинах, обробці параметрів вібрацій, який відрізняється тим, що додатково визначають параметри впливу на механічну систему (момент двигуна при пуску), визначають положення в просторі та здійснюють координатні перетворення сили, що породжує вібрацію і визначають її проекції на...
Спосіб визначення потокозчеплень ротора й швидкості частотно-регульованого асинхронного двигуна
Номер патенту: 39949
Опубліковано: 25.03.2009
Автори: Скалько Юрій Сергійович, Волков Олександр Васильович
МПК: H02P 21/00
Мітки: визначення, спосіб, потокозчеплень, ротора, двигуна, частотно-регульованого, асинхронного, швидкості
Формула / Реферат:
1. Спосіб визначення потокозчеплень ротора й швидкості частотно-регульованого асинхронного двигуна, який полягає у тому, що контролюють проекції узагальнених векторів статорної напруги й струму двигуна на осі нерухомої ортогональної координатної системи "", пов'язаної віссю "" з...
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором
Номер патенту: 61511
Опубліковано: 25.07.2011
Автори: Квашнін Валерій Олегович, Мусієнко Юлія Миколаївна
МПК: G01L 3/10
Мітки: визначення, спосіб, двигуна, моменту, короткозамкненим, ротором, трифазного, асинхронного
Формула / Реферат:
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором, який полягає в тому, що визначення моменту трифазного асинхронного двигуна відбувається за електричними координатами двигуна, що визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми іА, іВ, іС), момент обчислюється у мікроконтролері та подається на керуючий елемент, який відрізняється тим, що створюється математична модель трифазного...
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна
Номер патенту: 48510
Опубліковано: 25.03.2010
Автори: Топчієнко Юрій Анатолійович, Воробейчик Олег Станіславович, Урдін Ігор Володимирович, Козакевич Ігор Аркадійович
МПК: H02K 15/00
Мітки: ротора, визначення, активної, потокозчеплення, асинхронного, вектора, двигуна, складових, положення, ідентифікатора, спосіб, значень, намагнічуючих, струму, статора
Формула / Реферат:
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна, що включаєреєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів, який відрізняється тим, що як реально діючі в асинхронному двигуні сигнали використовують поточні значення фазних струмів, при цьому...
Попередній патент: Замок-застібка для ювелірних виробів та аксесуарів
Наступний патент: Інтерактивна система навчання методам цифрової обробки сигналів
Випадковий патент: Пасова передача