Пристрій для маніпулювання слябами для зачищення поверхонь слябів

Формула / Реферат
1. Пристрій для маніпулювання слябами (2а, 2b), виготовленими, зокрема, безперервним розливанням, поверхню яких зачищають перед прокаткою на прокатному стані, при цьому розташований на реверсивному шліфувальному столі (12а, 12b) сляб переміщують уперед і назад під встановленим в шліфувальній кабіні шліфувальним агрегатом блока (І, II) машинного зачищення, після обробки зачищенням однієї поверхні шліфувальний стіл прямолінійно висувають зі шліфувальної кабіни, сляб підіймають зі шліфувального стола і подають на перевертаючий пристрій, при цьому сляб (2а, 2b) після перевертання виймають з перевертаючого пристрою і поміщують іншою, необробленою поверхнею вгору на шліфувальному столі, який потім знову засувають в шліфувальну кабіну для обробки цієї поверхні, який відрізняється тим, що у відвідній зоні щонайменше одного блока (І, II) машинного зачищення, в яку шліфувальний стіл (12а, 12b) прямолінійно переміщується разом зі слябом (2а, 2b), що лежить на ньому, розташований маніпулятор (9) слябів, що поперечно переміщується, який включає раму (13) ходового механізму, яка перекриває по довжині шліфувальний стіл (12а, 12b), з розташованими всередині неї з кожного торця рамами (17а, 17b) поворотного механізму, що синхронно приводяться в рух, при цьому рами (17а, 17b) поворотного механізму з'єднані між собою за допомогою відповідно розташованих в рамі (17а, 17b) поворотного механізму, з можливістю підіймання і опускання, нижньої і верхньої підіймальних траверс (14а, 14b), при цьому одна підіймальна траверса (14а) забезпечена опорними елементами (21а), які захоплюють поверхню сляба знизу, а друга підіймальна траверса (14b) - опорними елементами (21b), що захоплюють протилежну поверхню сляба зверху.
2. Пристрій за п. 1, який відрізняється тим, що підіймальні траверси (14а, 14b) можуть підійматися і опускатися незалежно одна від іншої.
3. Пристрій за п. 1 або п. 2, який відрізняється тим, що рами (17а, 17b) поворотного механізму виконані з поворотною опорою (19), яка приводиться в дію приводом обертання (18) відносно рами (13) ходового механізму.
4. Пристрій за будь-яким із пп. 1-3, який відрізняється тим, що підіймальні траверси (14а, 14b) забезпечені зміщеними один відносно одного в напрямку довжини траверс шипоподібними несучими стрижнями (21а, 21b) як опорними елементами.
5. Пристрій за п. 4, який відрізняється тим, що несучі стрижні (21а, 21b) виконані з взаємним перекриттям до половини максимальної ширини сляба і виступають на мінімальну ширину сляба.
6. Пристрій за будь-яким із пп. 1-5, який відрізняється тим, що підіймальні траверси (14а, 14b) розташовані в напрямних (16) рам (17а, 17b) поворотного механізму.
7. Пристрій за будь-яким із пп. 1-6, який відрізняється тим, що підіймальні траверси (14а, 14b) мають упор (22), з яким стикується сляб (2а, 2b) своєю вузькою стороною.
8. Пристрій за будь-яким із пп. 1-7, який відрізняється тим, що для підіймального переміщення підіймальні траверси (14а, 14b) шарнірно зв'язані з гідроциліндрами (15) рам (17а, 17b) поворотного механізму.
Текст
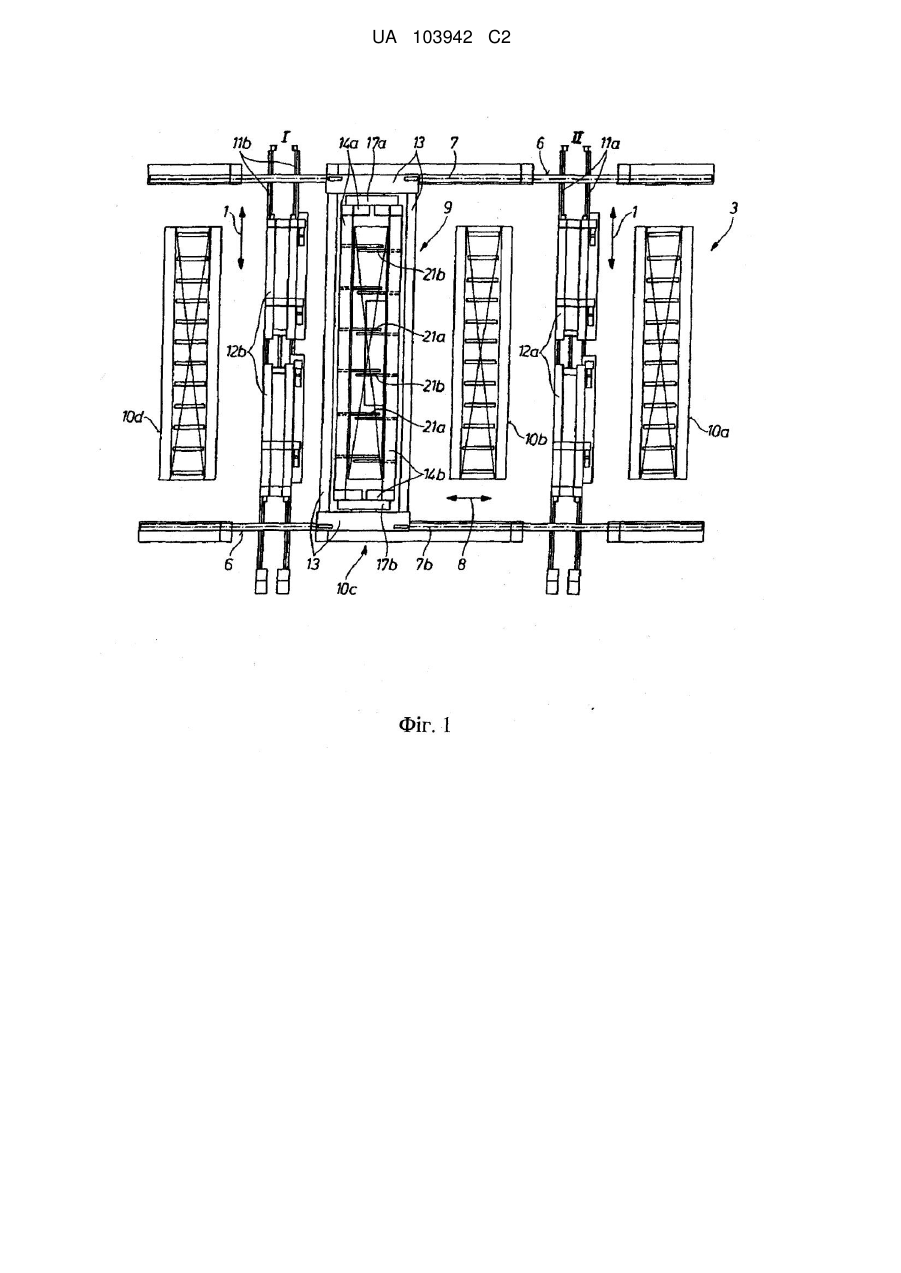
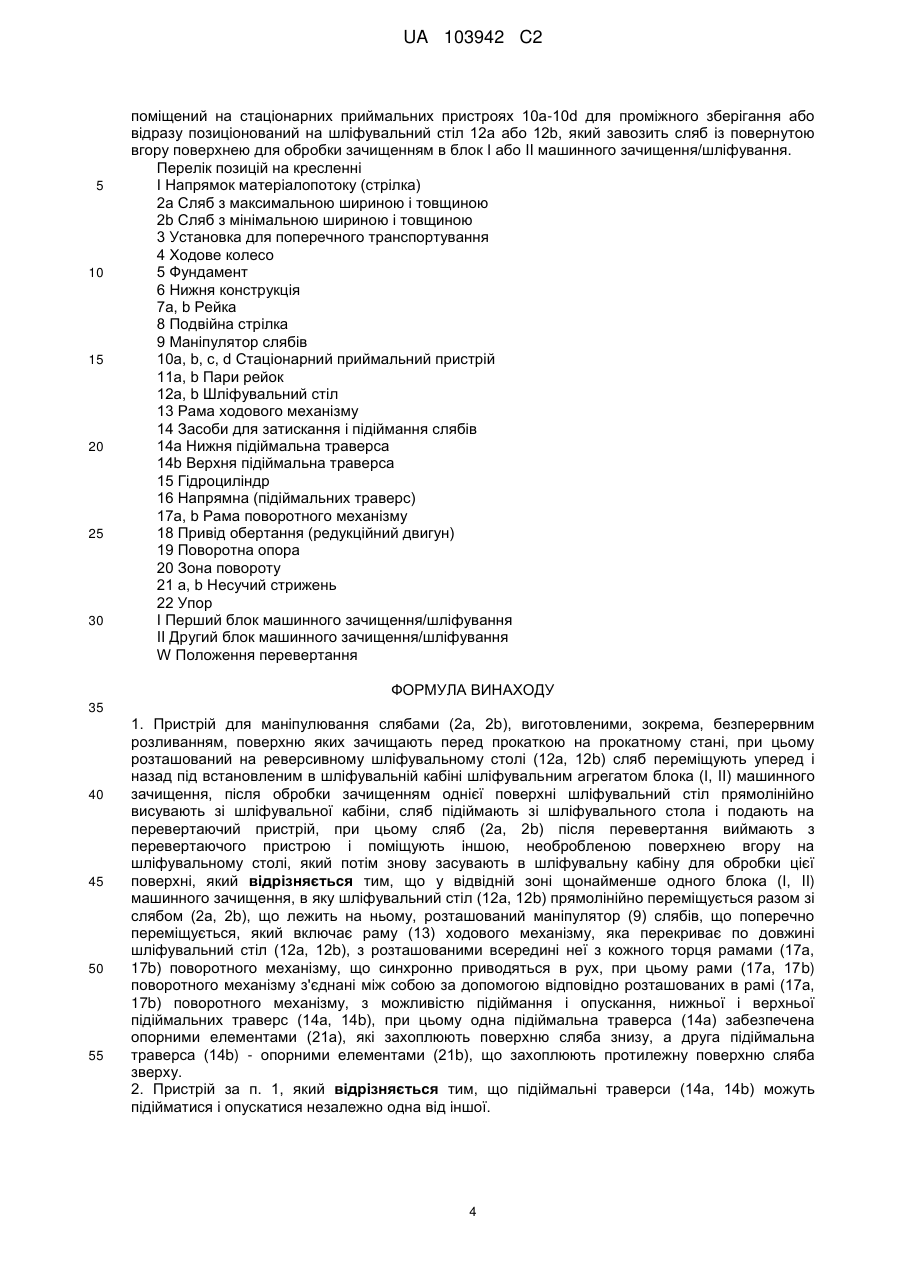
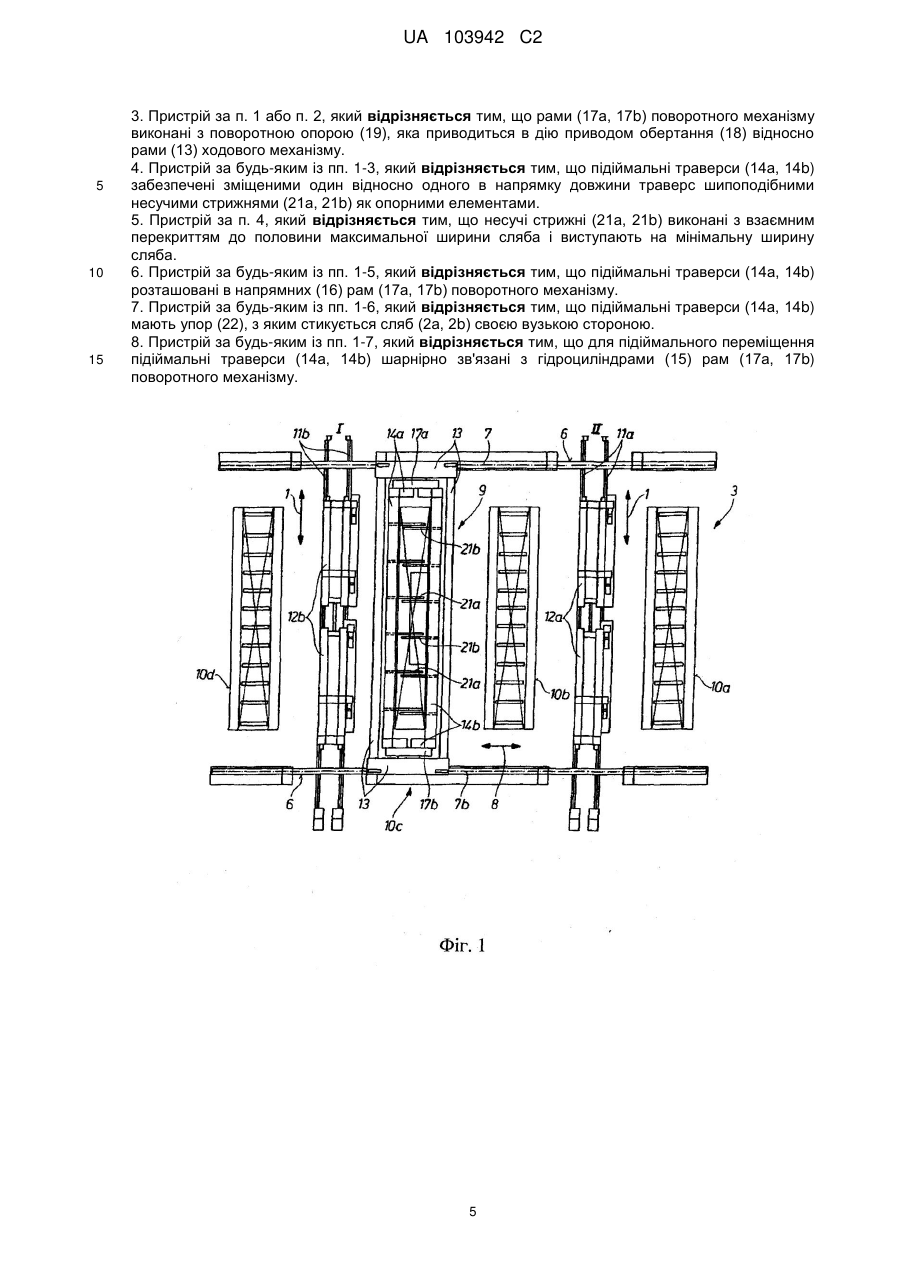
Реферат: Винахiд стосується способу і пристрою для маніпулювання слябами (2а, 2b), виготовленими, зокрема, безперервним розливанням, поверхню яких зачищають перед прокаткою на прокатному стані, при цьому розташований на реверсивному шліфувальному столі (12а, 12b) сляб переміщують уперед і назад під встановленим в шліфувальній кабіні шліфувальним агрегатом блока (І, II) машинного зачищення, після обробки зачищенням однієї поверхні шліфувальний стіл прямолінійно висувають з шліфувальної кабіни, сляб підіймають з шліфувального стола і подають на перевертаючий пристрій, при цьому сляб (2а, 2b) після перевертання виймають з перевертаючого пристрою і поміщують іншою, необробленою поверхнею вгору на шліфувальному столі, який потім знову засувають в шліфувальну кабіну для обробки цієї поверхні. Пропонується створити значно простіший спосіб і пристрій для маніпулювання при зачищенні безперервно литих слябів, з суттєво зниженими одночасно конструктивними витратами. Це досягається тим, що забезпечений поворотним засобом (14; 14а, 14b) для затискання і підіймання сляба маніпулятор (9) слябів захоплює сляб і забезпечує як поперечне транспортування, так і кантування затиснутого сляба. UA 103942 C2 (12) UA 103942 C2 UA 103942 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується пристрою для маніпулювання слябами, виготовленими, зокрема, безперервним розливанням, поверхню яких зачищають/шліфують перед прокаткою на прокатному стані, при цьому розташований на реверсивному шліфувальному столі сляб переміщують уперед і назад під встановленим в шліфувальній кабіні шліфувальним агрегатом блока машинного зачищення, після обробки зачищенням однієї поверхні шліфувальний стіл прямолінійно висувають з шліфувальної кабіни, сляб підіймають з шліфувального стола і подають на перевертаючий пристрій, при цьому сляб після перевертання виймають з перевертаючого пристрою і поміщують іншою, необробленою поверхнею вгору на шліфувальному столі, який потім знову засувають в шліфувальну кабіну для обробки цієї поверхні. У практиці звичайно прийнято, що перед прокаткою на прокатному стані, зокрема, поверхні з широкою і на розгляд також з вузькою стороною безперервно-литих, розділених із заготовки на бажану довжину слябів зачищають відповідно до вищеназваної технологічної послідовності. Використовувані з цією метою у виробничому процесі пристрої для транспортування і перевертання слябів потребують численних механічних засобів і вимагають великих витрат по гідравліці, зокрема, додатково до перевертаючих пристроїв, також на транспортні засоби, які приймають безперервно-литу заготовку і подають на наступну ділянку обробки або які підтримують матеріалопотік. Оскільки рейкові пересувні візки для поперечного транспортування або для наземного/тунельного транспортування візка повинні спочатку в'їжджати на шліфувальний стіл, який з цією метою також повинен бути забезпечений робочими рейками, то в результаті цього утворюється складна ситуація, пов'язана з розвантаженням слябів з шліфувального стола, піднятих туди за допомогою гідравлічних опор. Переміщувані паралельно один одному, відповідно по окремих робочих рейках, численні візки/вагонетки для поперечного транспортування доставляють потім навантажені сляби до стаціонарного пристрою для перевертання слябів, наприклад в формі перекидача. Сляб, який там перевертається, позиціонують на стаціонарний приймальний пристрій для слябів, з якого його забирають за допомогою візків для поперечного транспортування і доставляють назад на шліфувальний стіл. Тому задача винаходу полягає в тому, щоб створити значно простіший пристрій для маніпулювання при зачищенні безперервно-литих слябів, з суттєво зниженими одночасно конструктивними витратами. Ця задача вирішується з сторони способу тим, що сляб вміщують на забезпечений поворотним засобом для затискання і підйому сляба маніпулятор слябів, який забезпечує як поперечне транспортування, так і перевертання затиснутого сляба. Таким чином, всі необхідні функції для транспортування, підіймання, опускання, затискання і перевертання слябів об'єднані в одному агрегаті, а саме в багатофункціональному маніпуляторі слябів, який з цією метою програмується і керується з одного центра. Переважний варіант здійснення винаходу передбачає, що позиціонований на шліфувальному столі, поміщений на проміжне зберігання на стаціонарному приймальному пристрої або поданий рольгангом сляб може транспортуватися маніпулятором слябів, який з віддаленого збоку, паралельного відносно сляба положення, подається у вихідне положення для прийому сляба і розкритим для затискання і підіймання сляба засобом захоплює сляб, після чого засіб для затискання і підйому сляба закривається і маніпулятор слябів переміщується із затиснутим слябом в положення перевертання, в якому сляб шляхом повороту засобу для затискання і підйому сляба перекидається, після чого маніпулятор слябів переміщується на шліфувальний стіл, де засіб для затискання і підйому сляба опускається доти, доки сляб на укладений на шліфувальний стіл, і потім розкривається, а маніпулятор слябів, залишивши на столі сляб, переміщується в своє вихідне положення збоку паралельно іншому слябу. У послідовності процесу нічого не змінюється, якщо сляб не вміщується безпосередньо на шліфувальний стіл, а для проміжного зберігання на стаціонарний приймальний пристрій. Це дозволяє переважним чином досягти того, що маніпулятор слябів може переміщуватися в поперечному напрямку і в будь-якому порядку між щонайменше одним шліфувальним столом, що є, одним або декількома стаціонарними приймальними пристроями, а також положенням перевертання і, на розгляд, рольгангом для приймання сляба, який підлягає зачищенню, або для транспортування вже зачищеного сляба. Багатофункціональний маніпулятор слябів, нижня конструкція якого для ходової або рейкової колії для поперечного транспортування виконаний з бетону, дозволяє, таким чином, здійснювати всі логістичні задачі. При роботі переважно двох рознесених з відступом одна відносно одної шліфувальних машин забезпечується, з урахуванням проміжного зберігання на стаціонарних приймальних пристроях, постійне шліфування і безперервне завантаження не працюючого безпосередньо в даний момент блока машинного зачищення одним призначеним для обробки слябом. Таким 1 UA 103942 C2 5 10 15 20 25 30 35 40 45 50 55 60 чином, у вихідному положенні транспортного і перевертаючого циклу сляб знаходиться або на шліфувальному столі, або на стаціонарному приймальному пристрої. У положенні перевертання між, наприклад, двома стаціонарними приймальними пристроями і/або блоками машинного зачищення маніпулятор слябів має достатній простір, щоб перевернути сляб для зачищення поверхні з широкої сторони. Пристрій згідно з винаходом, зокрема для реалізації вказаного вище способу, передбачає, що у відвідній зоні щонайменше одного блока машинного зачищення, в яку шліфувальний стіл прямолінійно переміщується разом зі слябом, що лежить на ньому, розташований з цією метою поперечно переміщуваний маніпулятор слябів, який включає раму ходового механізму, що перекриває по довжині шліфувальний стіл, з розташованими всередині неї з кожного торця, рамами поворотного механізму, які синхронно приводяться в дію, при цьому рами поворотного механізму з'єднані між собою за допомогою відповідно розташованих в рамі поворотного механізму, з можливістю підіймання і опускання, нижньої і верхньої підіймальних траверс, і при цьому одна підіймальна траверса забезпечена опорними елементами, які захоплюють поверхню сляба знизу, а інша підіймальна траверса - опорними елементами, які захоплюють протилежну поверхню сляба зверху. Після захоплення сляба між двома підіймальними траверсами, один з опорних елементів несе сляб і позиціонується із затискачем за допомогою зміщення іншого опорного елемента. Для підіймального переміщення сляба захоплюваними зверху і знизу підіймальними траверсами ці траверси переважно за допомогою гідроциліндрів шарнірно зв'язані з рамами поворотного механізму і переважно розташовані в напрямних рам поворотного механізму. Переважне удосконалення винаходу передбачає, що підіймальні траверси можуть підійматися і опускатися незалежно одна від іншої. Таким чином, в положенні захоплення потрібно опустити лише одну підіймальну траверсу і потім підвести її зі сторони під сляб, доки вона своєю вузькою стороною не зістикується з переважно утвореним на підіймальних траверсах упором. Потім нижня підіймальна траверса підіймається, тим часом як верхня підіймальна траверса підіймається лише пізніше для затискання сляба. Після операції перевертання нижня підіймальна траверса бере на себе функцію верхньої підіймальної траверси, і далі в зворотному порядку. Перевертання сляба здійснюється переважно тим, що рами поворотного механізму виконані з поворотною опорою, що приводиться в дію приводом обертання відносно рами ходового механізму. Як привід обертання використовується переважно двигун з вбудованим редуктором. Згідно з іншим удосконаленням винаходу передбачено, що підіймальні траверси забезпечені зміщеними один відносно одного в напрямку довжини траверсів шилоподібними несучими стрижнями як опорними елементами. При цьому захоплювання, а також затискання сляба здійснюється суміщеними в одну лінію контактними поверхнями і зміщеними вгору і вниз по довжині сляба опорними елементами. З цією метою винахід передбачає, крім того, що несучі стрижні виконані з взаємним перекриттям до половини максимальної ширини сляба і виступають на мінімальну ширину сляба. Ширина такого маніпулюючого сляба може становити, наприклад, від 800 мм до 1700 мм, при довжині від 5000 мм до 12000 мм і товщині від 150 мм до 240 мм. Шилоподібні несучі стрижні нижньої і верхньої підіймальної траверси попередньо виконані, отже, такої довжини, що в будь-якому випадку сляб з передбаченою граничною шириною може бути надійно захоплений, затиснутий і перевернутий. Інші подробиці і переваги витікають з пунктів формули винаходу і нижченаведеного опису, в якому пояснюється більш детально представлений на фігурах приклад здійснення винаходу. При цьому показані: Фіг. 1 - схема розташування прилягаючої до розташованих з відступом один біля іншого блокам І і II машинного зачищення установки для поперечного транспортування з інтегрованим в неї пристроєм перевертання для переміщення слябів, які підлягають зачищенню; Фіг. 2 - установка для поперечного транспортування з пристроєм для перевертання слябів з фіг. 1 в схематичному зображенні збоку; Фіг. 3 - деталь з фіг. 1 і 2 у вигляді збоку маніпулятора слябів як пристрою для поперечного транспортування і перевертання слябів; Фіг. 4 - як деталь в схематичному зображенні збоку принциповий абрис з функціями маніпулятора слябів; Фіг. 5 - вигляд збоку детального зображення маніпулятора слябів з фіг. 4; Фіг. 6 - в схематичному вигляді збоку як деталь маніпулятора слябів його верхня і нижня підіймальна траверси при переміщенні через навантажений слябом шліфувальний стіл або стаціонарний приймальний пристрій і після опускання заштрихованої нижньої підіймальної 2 UA 103942 C2 5 10 15 20 25 30 35 40 45 50 55 60 траверси при захопленні сляба; Фіг. 6а - відповідне фіг. 6 зображення після захоплення і підйому, а також затискання сляба з максимальним габаритом по ширині за допомогою опущеної верхньої підіймальної траверси; і Фіг. 6b - відповідне фіг. 6а зображення для сляба з мінімальною шириною і товщиною. До двох блоків машинної обробки (шліфування), які не показані на фіг. 1 і відображені як елементи І і II, прилягає в напрямку матеріалопотоку по стрілці 1 встановлення 3 для поперечного транспортування для переміщення при шліфуванні слябів 2а або 2b, з яких сляб 2а має максимальну ширину і товщину (пор. фіг. 6а), а сляб 2b мінімальну ширину і товщину (пор. фіг. 6b). Ця установка містить маніпулятор 9 слябів, що переміщується ходовими колесами 4 по прокладених на закріпленій на фундаменті 5 нижній конструкції, наприклад, з бетону, рейкам 7а, 7b в напрямку подвійної стрілки 8 упоперек блоків І і II машинного зачищення/шліфування (пор. фіг. 3). Установка 3 для подовжнього транспортування, згідно з прикладом здійснення на фіг. 2 і 3, містить розташовані з відступом і паралельно один одному декілька стаціонарних приймальних пристроїв 10а, b, с і d, при цьому між відповідно двома крайніми приймальними пристроями для слябів 10а, 10b або 10с, 10d в напрямку матеріалопотоку простягаються укладені на основі пари рейок 11а, 11b. По них можуть переміщуватися шліфувальні столи 12а, 12b, які завозять оброблюваний або сляб, що шліфується, в блок І або II машинного зачищення, або вивозять для перевертання сляба для шліфування іншої поверхні. Маніпулятор слябів складається з охоплюваної і замикаючої по периметру нижню конструкцію 6 з обома рейками 7а, 7b рами 13 ходового механізму (пор. фіг. 1 і 3). У ній передбачені засоби 14 для затискання і підіймання сляба, виконані як нижня підіймальна траверса 14а і верхня підіймальна траверса 14b, які за допомогою гідроциліндрів 15 можуть підійматися і опускатися в напрямних 16 (пор. фіг. 4) незалежно один від одного. Засоби 14 для затискання і підіймання сляба для перевертання захопленого і затиснутого сляба 2а або 2b виконані, крім того, поворотними, при цьому нижня, рівно як і верхня підіймальна траверси 14а або 14b на своїх обох торцях закріплені відповідно в несеній рамі 13 ходового механізму рами 17а, 17b поворотного механізму (пор. фіг. 3). Рами 17а, 17b поворотного механізму виконані відносно рами 13 ходового механізму з кульовим поворотним з'єднанням 19, що приводиться в дію від приводу обертання 18, зокрема від редукційного двигуна, як схематично визначено на фіг. 5. Зона повороту маніпулятора 9 слябів позначена на фіг. 2 і 5 у вигляді штрихпунктирного кола 20 (пор. також фіг. 4). Нижня і верхня підіймальна траверси 14а, 14b забезпечені шипоподібними несучими стрижнями 21а або 21b як опорні і переймаючі елементи. Несучі стрижні 21а нижньої підіймальної траверси 14а в подовжньому напрямку траверси розташовані зі зміщенням відносно несучих стрижнів 21b верхньої підіймальної траверси 14b (пор. фіг. 1). У вихідному положенні транспортного і перевертаючого циклу сляб 2а або 2b знаходиться або на шліфувальному столі 12а, 12b, або на стаціонарному приймальному пристрої 10а, b, с або d. Маніпулятор 9 слябів може переміщуватися на нижній конструкції 6 в будь-якому порядку через стаціонарні приймальні пристрої 10а-10d для слябів і шліфувальні столи 12а, 12b і таким чином здійснювати бажаний розподіл слябів. Для захоплення сляба маніпулятор 9 слябів переміщується з розкритими підіймальними траверсами 14а, 14b в паралельне положення відносно стаціонарного приймального пристрою 10а-10d або відносно шліфувального стола 12а, 12b, як це показано на фіг. 1 в положенні відносно шліфувального стола 12b. Після того як маніпулятор 9 слябів перемістився через шліфувальний стіл або стаціонарний приймальний пристрій для сляба і знаходиться в бічному, паралельному відносно них положенні, як показано на прикладі з фіг. 6 і 6а або 6b, маніпулятор слябів опускає із заштрихованого піднятого положення нижню підіймальну траверсу 14а і потім переміщується під піднятий на прикладі здійснення з фіг. 6 на стаціонарному приймальному пристрої 10с сляб 2а або 2b, як показано суцільними лініями. Поперечне переміщення маніпулятора 9 слябів для захоплення сляба знизу завершується, як тільки сляб 2а або 2b стикується з упором 22 на підіймальній траверсі 14а. Потім нижня підіймальна траверса 14а зі слябом, що лежить ній, підіймається, після чого верхня підіймальна траверса 14b опускається вниз для затискання сляба, як показано на фіг. 6а для сляба 2а з максимальними габаритами і на фіг. 6b для сляба з мінімальними габаритами. Для перевертання маніпулятор 9 слябів переміщується в положення для перевертання (W), що забезпечує достатній вільний простір, як визначено на фіг. 2 між двома стаціонарними приймальними пристроями 10b і 10с (пор. також фіг. 5). Після перевертання нижня підіймальна траверса 14а бере на себе функцію верхньої підіймальної траверси 14b і навпаки. Обернений таким чином сляб 2а або 2b маніпулятором слябів після поперечного переміщення може бути 3 UA 103942 C2 5 10 15 20 25 30 поміщений на стаціонарних приймальних пристроях 10а-10d для проміжного зберігання або відразу позиціонований на шліфувальний стіл 12а або 12b, який завозить сляб із повернутою вгору поверхнею для обробки зачищенням в блок І або II машинного зачищення/шліфування. Перелік позицій на кресленні I Напрямок матеріалопотоку (стрілка) 2а Сляб з максимальною шириною і товщиною 2b Сляб з мінімальною шириною і товщиною 3 Установка для поперечного транспортування 4 Ходове колесо 5 Фундамент 6 Нижня конструкція 7а, b Рейка 8 Подвійна стрілка 9 Маніпулятор слябів 10а, b, с, d Стаціонарний приймальний пристрій 11а, b Пари рейок 12а, b Шліфувальний стіл 13 Рама ходового механізму 14 Засоби для затискання і підіймання слябів 14а Нижня підіймальна траверса 14b Верхня підіймальна траверса 15 Гідроциліндр 16 Напрямна (підіймальних траверс) 17а, b Рама поворотного механізму 18 Привід обертання (редукційний двигун) 19 Поворотна опора 20 Зона повороту 21 а, b Несучий стрижень 22 Упор І Перший блок машинного зачищення/шліфування II Другий блок машинного зачищення/шліфування W Положення перевертання ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Пристрій для маніпулювання слябами (2а, 2b), виготовленими, зокрема, безперервним розливанням, поверхню яких зачищають перед прокаткою на прокатному стані, при цьому розташований на реверсивному шліфувальному столі (12а, 12b) сляб переміщують уперед і назад під встановленим в шліфувальній кабіні шліфувальним агрегатом блока (І, II) машинного зачищення, після обробки зачищенням однієї поверхні шліфувальний стіл прямолінійно висувають зі шліфувальної кабіни, сляб підіймають зі шліфувального стола і подають на перевертаючий пристрій, при цьому сляб (2а, 2b) після перевертання виймають з перевертаючого пристрою і поміщують іншою, необробленою поверхнею вгору на шліфувальному столі, який потім знову засувають в шліфувальну кабіну для обробки цієї поверхні, який відрізняється тим, що у відвідній зоні щонайменше одного блока (І, II) машинного зачищення, в яку шліфувальний стіл (12а, 12b) прямолінійно переміщується разом зі слябом (2а, 2b), що лежить на ньому, розташований маніпулятор (9) слябів, що поперечно переміщується, який включає раму (13) ходового механізму, яка перекриває по довжині шліфувальний стіл (12а, 12b), з розташованими всередині неї з кожного торця рамами (17а, 17b) поворотного механізму, що синхронно приводяться в рух, при цьому рами (17а, 17b) поворотного механізму з'єднані між собою за допомогою відповідно розташованих в рамі (17а, 17b) поворотного механізму, з можливістю підіймання і опускання, нижньої і верхньої підіймальних траверс (14а, 14b), при цьому одна підіймальна траверса (14а) забезпечена опорними елементами (21а), які захоплюють поверхню сляба знизу, а друга підіймальна траверса (14b) - опорними елементами (21b), що захоплюють протилежну поверхню сляба зверху. 2. Пристрій за п. 1, який відрізняється тим, що підіймальні траверси (14а, 14b) можуть підійматися і опускатися незалежно одна від іншої. 4 UA 103942 C2 5 10 15 3. Пристрій за п. 1 або п. 2, який відрізняється тим, що рами (17а, 17b) поворотного механізму виконані з поворотною опорою (19), яка приводиться в дію приводом обертання (18) відносно рами (13) ходового механізму. 4. Пристрій за будь-яким із пп. 1-3, який відрізняється тим, що підіймальні траверси (14а, 14b) забезпечені зміщеними один відносно одного в напрямку довжини траверс шипоподібними несучими стрижнями (21а, 21b) як опорними елементами. 5. Пристрій за п. 4, який відрізняється тим, що несучі стрижні (21а, 21b) виконані з взаємним перекриттям до половини максимальної ширини сляба і виступають на мінімальну ширину сляба. 6. Пристрій за будь-яким із пп. 1-5, який відрізняється тим, що підіймальні траверси (14а, 14b) розташовані в напрямних (16) рам (17а, 17b) поворотного механізму. 7. Пристрій за будь-яким із пп. 1-6, який відрізняється тим, що підіймальні траверси (14а, 14b) мають упор (22), з яким стикується сляб (2а, 2b) своєю вузькою стороною. 8. Пристрій за будь-яким із пп. 1-7, який відрізняється тим, що для підіймального переміщення підіймальні траверси (14а, 14b) шарнірно зв'язані з гідроциліндрами (15) рам (17а, 17b) поворотного механізму. 5 UA 103942 C2 6 UA 103942 C2 7 UA 103942 C2 8 UA 103942 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for handling slabs for grinding the surfaces of the slabs
Автори англійськоюHeide, Carsten
Автори російськоюХайде Карстен
МПК / Мітки
МПК: B21B 39/20, B24B 7/00, B24B 27/00, B21B 39/24
Мітки: поверхонь, слябів, зачищення, слябами, пристрій, маніпулювання
Код посилання
<a href="https://ua.patents.su/11-103942-pristrijj-dlya-manipulyuvannya-slyabami-dlya-zachishhennya-poverkhon-slyabiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для маніпулювання слябами для зачищення поверхонь слябів</a>
Пристрій безаварійної видачі слябів
Номер патенту: 15239
Опубліковано: 15.06.2006
Автори: Негрій Василь Якович, Безчерев Олександр Сергійович, Пушков Валерій Васильович, Дурнів Сергій Олександрович
МПК: F27D 3/00
Мітки: видачі, безаварійної, пристрій, слябів
Формула / Реферат:
Пристрій безаварійної видачі слябів, що складається з металевої рами, який відрізняється тим, що рама виконана порожнистою, водоохолоджувальною, П-подібної форми з ребрами жорсткості всередині із труби діаметром 168х28 мм сталі марки 12х1МФ, та встановлена безпосередньо усередині нагрівальної печі.
Пристрій для очищення слябів
Номер патенту: 52534
Опубліковано: 25.08.2010
Автор: Кашанський Дмитро Анатолійович
МПК: B21B 45/04, B08B 1/02
Мітки: очищення, пристрій, слябів
Формула / Реферат:
Пристрій для очищення слябів, що містить встановлений у корпусі з можливістю хитання очисний інструмент, зв'язаний із приводом його обертання, і механізм притиску очисного інструмента до сляба, що виконаний у вигляді двоплечого важеля, на одному кінці якого закріплений очисний інструмент, а другий кінець зазначеного важеля кінематично з'єднаний з гідроциліндром за допомогою тяги, який відрізняється тим, що він оснащений контрвантажем, що...
Спосіб та пристрій для очищення слябів, тонких слябів, профілів і подібного
Номер патенту: 92755
Опубліковано: 10.12.2010
Автори: Яннаш Отмар, Хеммерлє Юрген, Хоубен Андреас, Арменат Юрген, Шустер Інго, Йонен Петер, Рункель Томас, Ліппольд Карстен, Ріттнер Карл, Ельс Бернхард, Копфштедт Уве
МПК: B21B 45/04
Мітки: слябів, подібного, пристрій, тонких, очищення, профілів, спосіб
Формула / Реферат:
1. Спосіб видалення окалини, що відшаровується, та інших сторонніх речовин з верхньої і нижньої сторони литого виробу (3), такого як сляб, тонкий сляб, профіль і подібне, текучими середовищами, що розбризкуються по литому виробу (3) за допомогою очищувального пристрою (5), що складається щонайменше з одного розбризкувального пристрою (8), розташованого над відлитим виробом (3), і щонайменше одного розбризкувального пристрою (9),...
Розвертально-передавальний пристрій для слябів у лінії прокатного стана
Номер патенту: 81284
Опубліковано: 25.06.2013
Автори: Соколов Єгор Валентинович, Єлецьких Володимир Іванович, Брехов Євген Володимирович, Шевченко Сергій Володимирович, Бурдов Іван Сергійович
МПК: B21B 39/00
Мітки: слябів, пристрій, розвертально-передавальний, прокатного, стана, лінії
Формула / Реферат:
Розвертально-передавальний пристрій для слябів у лінії прокатного стана, що містить взаємоперпендикулярні передавальний та розкатний рольганги, який відрізняється тим, що приймальна секція розкатного рольганга обладнана піднімальним столом, який з боку передавального рольганга встановлений на шток гідроциліндра, а із протилежної сторони закріплений на шарнірній опорі, крім того, пристрій оснащений похилим стелажем у вигляді балок з...
Спосіб і пристрій для виготовлення слябів
Номер патенту: 51790
Опубліковано: 16.12.2002
Автори: Урлау Ульріх, Бьохер Герхард, Мюллер Петер, Шемайт Ганс
МПК: B22D 11/04, B22D 41/50
Мітки: спосіб, виготовлення, слябів, пристрій
Формула / Реферат:
1. Спосіб виготовлення слябів шириною D, більшою 100 мм, при швидкості розливання v, меншій 3 м/хв, в установці безперервного розливання, при якому розплав підводять у кристалізатор із збірника через заглибний ливарний стакан і з боку горловини витягають твердіючу оболонку, яка охоплює зумпф, у кліть з напрямними сляба, який відрізняється тим, що підведений розплав надходить у кристалізатор зі швидкістю (vk), що відноситься до швидкості...
Попередній патент: Вибір домену для ініційованої мобільним об’єктом служби повідомлень
Наступний патент: Спосіб виявлення гарячих областей випромінюючої поверхні світлодіода
Випадковий патент: Магнієвий стоп