Пристрій та спосіб контролю гостроти різальної крайки
Номер патенту: 114801
Опубліковано: 10.08.2017
Автори: Кілдеби Аллан, Мадсен Томмі Ертболл, Хустер Йохен
Формула / Реферат
1. Пристрій для контролю гостроти різальної крайки ножа (18) з джерелом (36) світла для освітлення ножа (18) і камерою (44) для записування зображень ножа (18), який відрізняється тим, що джерело (36) світла виконане з можливістю проектування на ніж (18), принаймні, однієї опорної лінії (52), що перетинає різальну крайку (48) ножа (18) у полі зору камери (44), при цьому опорна лінія (52) аналізується для генерації індикації гостроти різальної крайки.
2. Пристрій за п. 1, який відрізняється тим, що опорною лінією (52) є освітлена лінія, з обох сторін якої знаходяться неосвітлені зони.
3. Пристрій за п. 2, який відрізняється тим, що на шляху світла від джерела (36) світла до ножа розташований циліндричний оптичний елемент (40) або оптичний елемент, що виконаний з можливістю обертання.
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що джерелом (36) світла є лазер (37).
5. Пристрій за будь-яким з пп. 1-4, який відрізняється тим, що джерелом (36) світла є імпульсне джерело світла.
6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що ніж (18) встановлений на барабані (16), що обертається і запускає тригерний пристрій (42) для синхронізації роботи камери (44) та/або імпульсного джерела (36) світла, що функціонально пов'язаний з обертанням барабана (16).
7. Пристрій за будь-яким з пп. 1-6, який відрізняється тим, що джерело (36) світла і камера (44) встановлені на опорі, яка може переміщатися уздовж різальної крайки (48).
8. Пристрій за будь-яким з пп. 6, 7, який відрізняється тим, що тригерний пристрій (42) змонтований на тій же самій опорі.
9. Пристрій за будь-яким з пп. 7, 8, який відрізняється тим, що загальною опорою є корпус (29), в якому розміщуються джерело (36) світла і камера (44).
10. Пристрій за будь-яким з пп. 1-9, який відрізняється тим, що містить елемент засувки (32), що є рухомим і може бути розміщений між джерелом (36) світла і ножем (18) та/або між камерою (44) і ножем (18).
11. Пристрій за будь-яким з пп. 1-10, який відрізняється тим, що джерело (36) світла і/або камера (44) розміщені у корпусі (29), який може бути заповнений стиснутим газом.
12. Пристрій за будь-яким з пп. 1-11, який відрізняється тим, що напрямок падіння світла (46) на різальну крайку (48) і оптична вісь камери (44) на різальну крайку визначає кут (α), що становить щонайменше 45° і не більше 135°, більш переважно від 60° до 90°.
13. Спосіб контролю гостроти різальної крайки ножа (18), що включає операції, при яких:
- проектують принаймні одну опорну лінію (52) на ніж (18), яка перетинає різальну крайку (48) ножа (18);
- записують зображення опорної лінії (52);
- оцінюють гостроту різальної крайки, залежно від форми записаного зображення опорної лінії (52).
Текст
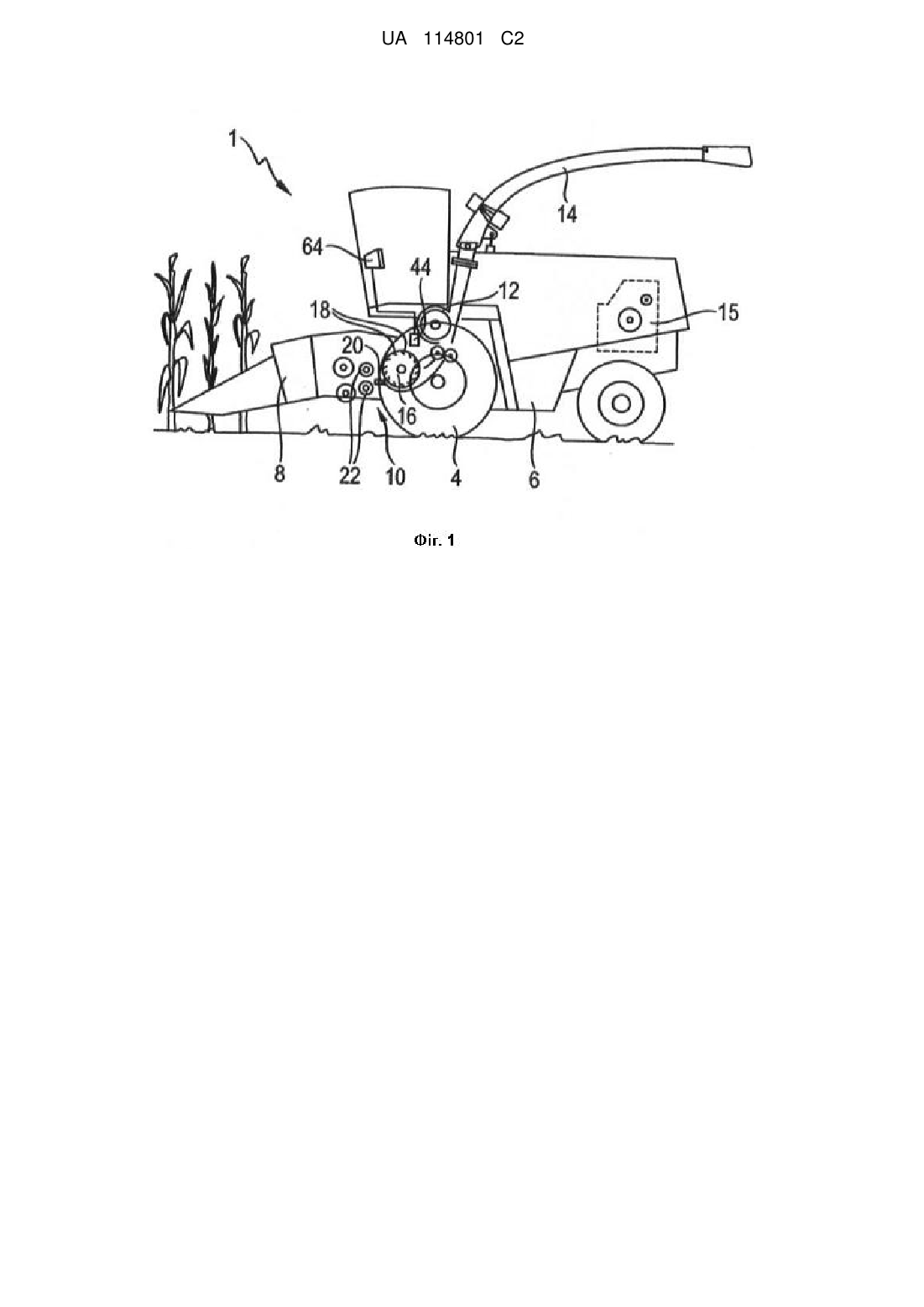
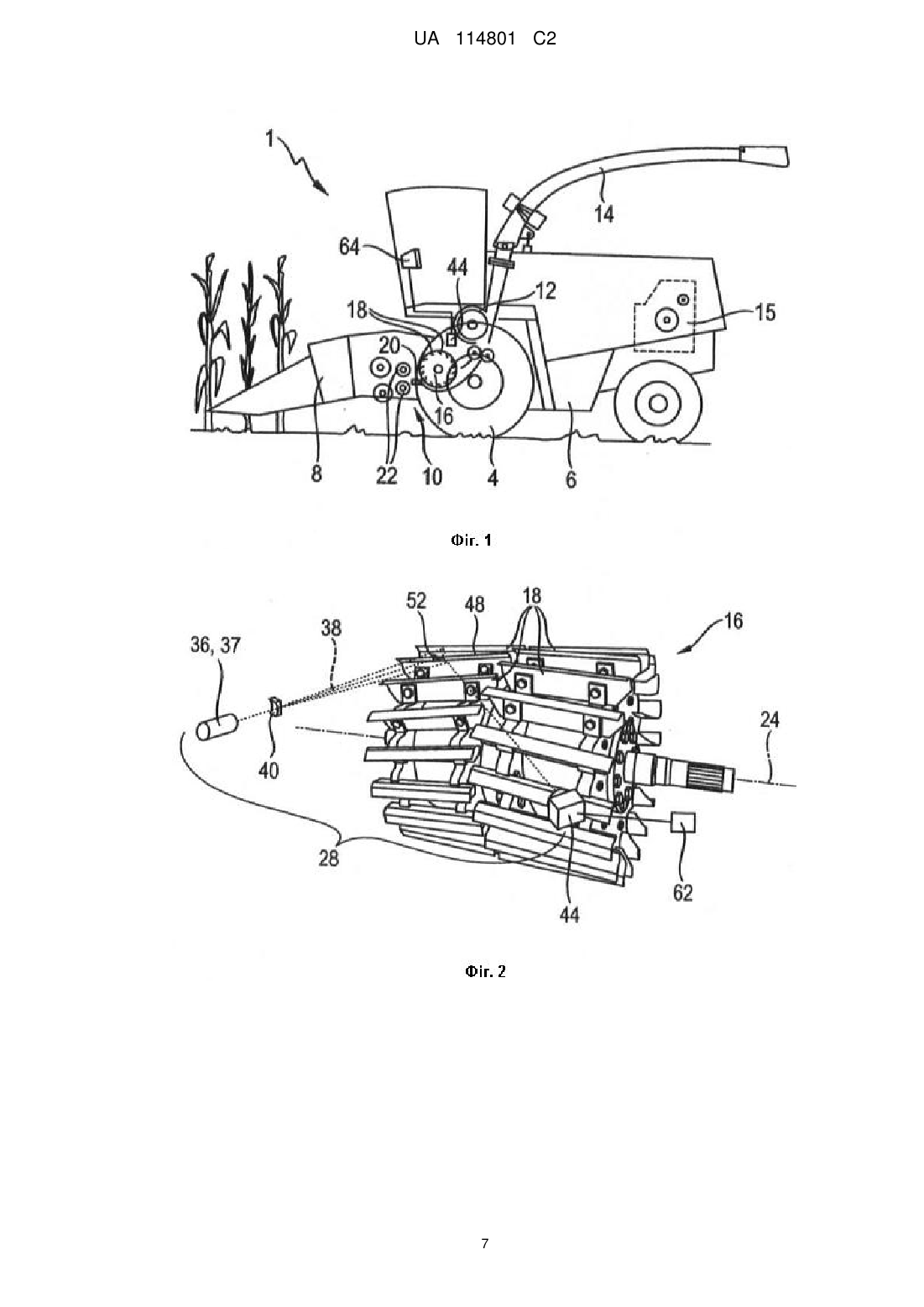
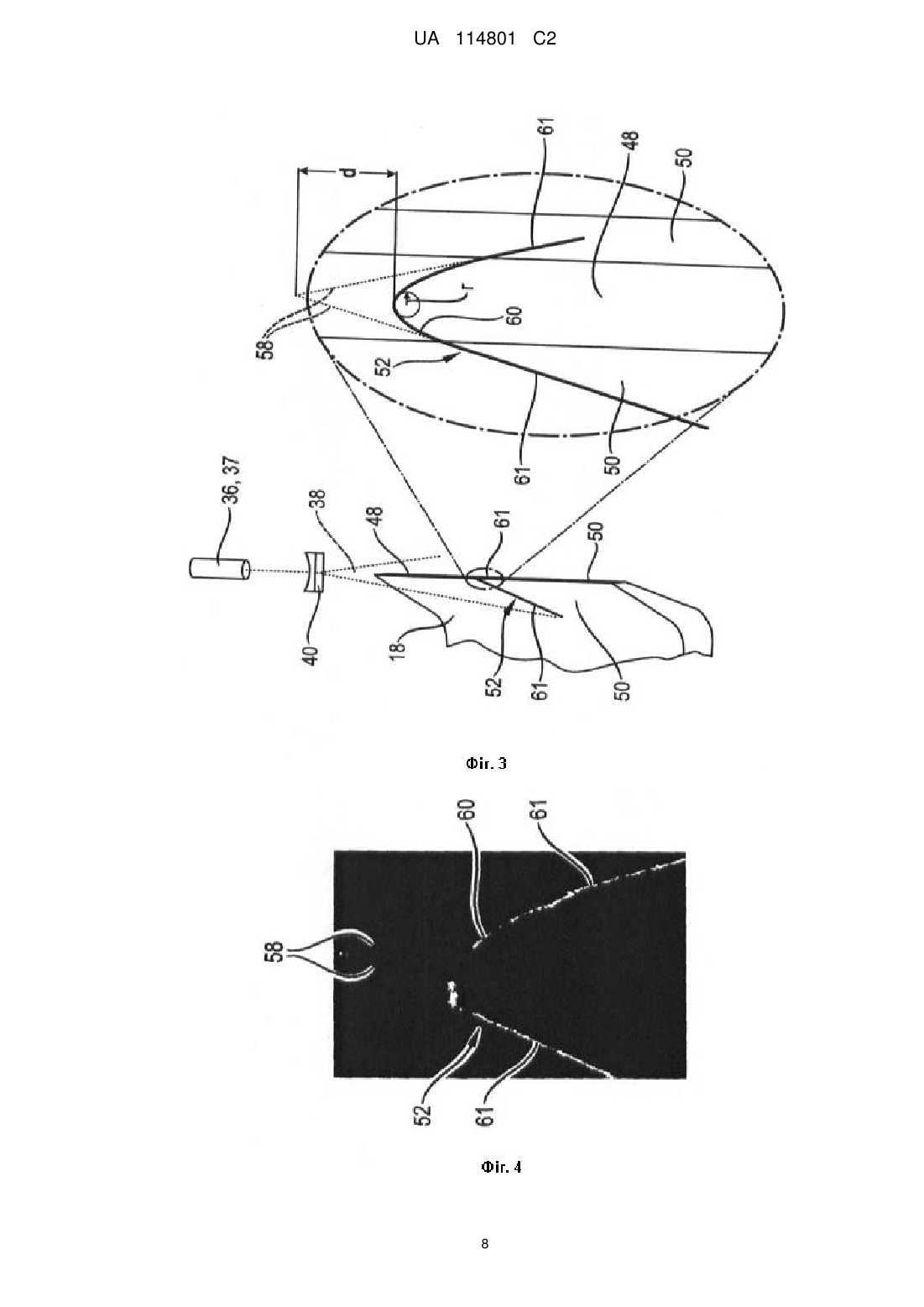
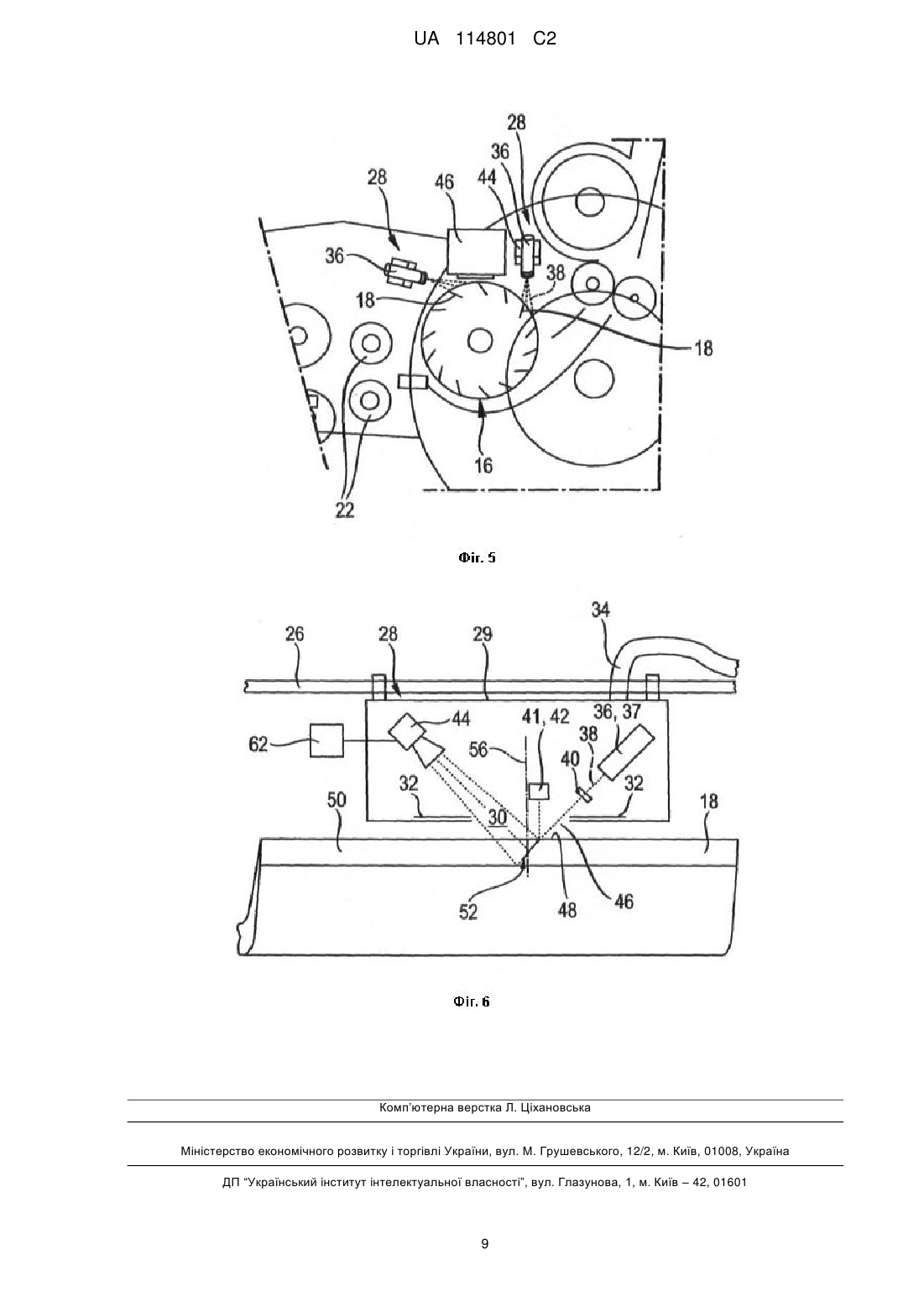
Реферат: Пристрій для контролю гостроти різальної крайки ножа (18) містить джерело світла (36) для освітлення ножа (18) і камеру (44) для запису зображень ножа (18). Джерело світла (36) обладнано для того, щоб проектувати на ніж (18) принаймні одну опорну лінію (52), яка в полі зору камери (44) перетинає різальну крайку (48) ножа (18). За допомогою форми опорної лінії (52) в зображенні, записаному камерою (44), може бути оцінена гострота різальної крайки. UA 114801 C2 (12) UA 114801 C2 UA 114801 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід належить до пристрою для контролю гостроти різальної крайки ножа, зокрема обертового ножа на ножовому барабані сільськогосподарської збиральної машини, такої як, наприклад, польовий подрібнювач, прес-підбирач та інші. З документа ЕР 1522214 D1 відомий пристрій для контролю гостроти різальної крайки, що містить джерело світла для освітлення ножа, камеру для отримання зображень ножа, освітленого джерелом світла і контрольний пристрій, в якому зображення, виконані камерою, піддають обробці, з метою оцінки гостроти різальних крайок ножів, у порівнянні з заданою формою. Напрямок огляду камери істотно орієнтований радіально до осі барабана, що несе ножі, так що різальна крайка ножа, виступаюча у напрямку до камери, істотно, в зображеннях камери з'являється тільки у вигляді тонкої лінії між двома ділянками, кожна з яких відповідає поверхням ножа. Отримання затуплення різальної крайки не впливає на форму ножа, що з'являється в зображеннях камери. В зображеннях можна спостерігати лише ширину лінії між двома поверхнями ножа. Виходячи з цього, досить важко зробити точну оцінку гостроти різальної крайки ножа. Технічна задача, на вирішення якої направлено даний винахід, є подальший розвиток пристрою, описаного вище типу, з метою забезпечення якомога простими засобами безпечної та надійної оцінки гостроти різальної крайки. З одного боку, задача вирішується тим, що у пристрої для контролю різальної крайки ножа з джерелом світла для освітлення ножа і камерою для виконання зображень ножа джерело світла обладнане з можливістю проектування принаймні однієї опорної лінії, що перетинає різальну крайку ножа у полі зору камери, при цьому визначається контурна лінія для генерування величини гостроти різальної крайки. Опорна лінія слідує за контуром ножа і тому має таку кривизну у зоні різальної крайки, яка безпосередньо пов'язана з радіусом кривизни і, отже, з гостротою різальної крайки. Досліджуючи профіль опорної лінії на зображеннях, наданих камерою, можна забезпечити задану гостроту різальної крайки, базуючись на надійній кількісній оцінці. Відповідно до переважної конфігурації, опорною лінією є освітлена лінія з обох сторін якої знаходяться неосвітлені зони. Така опорна лінія може, наприклад, бути забезпечена світлом від джерела світла, що проходить крізь щілиноподібний отвір. Різко визначена межа між освітленою і неосвітленою зонами ножа також може служити опорною лінією; така межа може, наприклад, бути отримана шляхом затінення частини світла від джерела світла з переважно прямого краю. Крім того, опорна лінія у вигляді освітленої лінії, переважно, може бути отриманою за умови, коли на шляху світла від джерела світла до ножа встановлений циліндричний оптичний елемент, такий як, наприклад, циліндрична лінза, або циліндричне дзеркало, або обертовий оптичний елемент. Якщо джерело світла генерує широко розкритий назовні світловий конус, наприклад, у випадку джерела світла розжарювання, циліндричний оптичний елемент може застосовуватися для фокусування світлового конусу на лінійну освітлену ділянку. Відповідно до переважної конфігурації, джерело світла генерує сильно стиснутий промінь; циліндричний оптичний елемент може забезпечувати появу опорної лінії завдяки тому, що він розгалужує (розкриває) стиснутий промінь у площині. За допомогою обертового оптичного елемента, опорна лінія може бути забезпеченою протягом будь-якого періоду часу контролю таким чином, що стислий промінь з джерела світла переміщають над ножем. Немає в тому потреби, щоб опорна лінія в будь-який час була повністю видимою; для здійснення винаходу, що заявляється, достатньо, якщо стислий промінь під час здійснення обороту обертового елемента поступово натягує опорну лінію на ніж. Зокрема, як джерело світла для генерування сильно стислого світлового промінь, може бути застосований лазер. Практика показала, для того щоб мати можливість виконувати вимірювання гостроти ножа, що рухається, камера може працювати з короткими витримками. Якщо джерело світла генерує світло поза межами коротких витримок камери, воно не може бути застосовано для вимірювання гостроти. Для забезпечення енергозберігаючого режиму роботи доцільно застосовувати імпульсне джерело світла. При цьому імпульсне джерело світла додатково дає можливість виконувати вимірювання на ножеві, що рухається, навіть коли витримки камери є більш тривалими, у порівнянні з тривалістю імпульсу джерела світла, і занадто тривалими для заморожування руху ножа. Коли ніж встановлюють на барабані, що обертається, за звичайним способом, прийнятим для збиральних машин, для синхронізації роботи камери і/або імпульсного джерела світла, тригерний пристрій, практично, буде сполученим з обертанням барабана. Таким чином, можуть бути отримані зображення, в яких положення різальної крайки є таким, що відтворюється і 1 UA 114801 C2 5 10 15 20 25 30 35 40 45 50 55 60 передбачається. Для пристрою обробки зображення, підключеного в нижче розташованому положенні, це спрощує пошук різальної крайки в зображеннях, наданих камерою, і тим самим знижує затрати на обробку. Джерело світла і камера, переважно, встановлені на опорі, яку можна переміщати уздовж різальної крайки. Завдяки переміщенню опори, опорна лінія може зміщатися уздовж різальної крайки ножа і гострота різальної крайки може визначатися для численних точок різальної крайки. Шляхом усереднення значень вимірювання гостроти різальної крайки для різних точок різальної крайки (або декількох різальних крайок для одного й того ж барабана), може бути попереджено помилкову оцінку, яку є ймовірність отримати, наприклад, якщо вимірювання відбувається тільки на якійсь незначній частинці ножа. Тригерний пристрій може бути встановлений, практично, на тій же опорі, що і джерело світла і камера, з тим, щоб бути у змозі рухатися уздовж різальної крайки разом з ними. Таким чином, можна гарантувати, що різальна крайка ножа в зображеннях, наданих камерою, завжди знаходиться в одному й тому ж місці, навіть коли ніж орієнтовано з перекосом відносно осі барабана. Джерело світла та/або камера, переважно, розміщені в корпусі, який можна завантажити газом під тиском. У зв'язку з тим, що стиснений газ витікає з корпусу, зокрема, в напрямку ножа, що розглядається, мають бути виконані засоби, що запобігають або, принаймні, знижують ризик попадання матеріалу, який піддають різанню, у корпус, і забруднення оптичних поверхонь джерела світла та/або камери матеріалом, що підлягає різанню. Таким же чином, рухливий елемент засувки, розміщений між джерелом світла і ножем та/або між камерою і ножем, може забезпечити обмеження для накопичення бруду на оптичних поверхнях джерела світла і камери. Для того, щоб кривизну опорної лінії на різальній крайці стало добре видно на зображеннях, наданих камерою, напрямок падіння, по якому світло від джерела світла потрапляє на різальну крайку, і напрямок виду визначаються кутом, що становить, щонайменше, 45° і не більше 135°, більш переважно, від 60° до 90°. Поставлена технічна задача вирішується за допомогою способу контролю гостроти різальної крайки ножа, що включає операції, при яких: - проектують принаймні одну опорну лінію на ніж, яка перетинає різальну крайку ножа; - записують зображення опорної лінії; - оцінюють гостроту різальної крайки із застосуванням форми опорної лінії в записаному зображенні. Подальші ознаки і переваги даного винаходу можуть бути отримані з наступного опису прикладів здійснення з посиланням на додані креслення, де: Фіг. 1 зображує схематичний вигляд польового подрібнювача, наприклад, збиральної машини, згідно з винаходом; Фіг. 2 зображує вигляд в перспективі барабана подрібнювача і встановленого на ньому пристрою для контролю гостроти різальної крайки, відповідно до винаходу; Фіг. 3 зображує схематичний вигляд ножа з точки зору камери пристрою для контролю гостроти різальної крайки; Фіг. 4 показує приклад зображення, наданого за допомогою камери пристрою для контролю гостроти різальної крайки; і Фіг. 5 показує схематичне зображення розрізу пристрою для контролю гостроти різальної крайки через пристрій, який може переміщатися уздовж ножа, який має бути підданий контролю. На фіг. 1 показано польовий подрібнювач 1 з пристроєм для контролю гостроти різальної крайки відповідно до даного винаходу. Польовий подрібнювач 1 забезпечений шасі 4, рамою 6 транспортного засобу, монтажною приставкою 8, встановленою в передній частині рами 6 транспортного засобу, що служить для підбирання матеріалу врожаю з ґрунту і подання вказаного матеріалу врожаю в транспортуючий канал, і в межах рами 6, з подрібнювальним блоком 10, постакселератором 12 і розвантажувальним жолобом 14, які розташовані один за одним на транспортуючому каналу, і з двигуном 15 для приведення в рух шасі 4 і рухомих частин приставки 8 для підбирання матеріалу врожаю подрібнювального блоку 10 і постакселератора 12. Приставка 8 для підбирання матеріалу врожаю польового подрібнювача 1 є змінною. На фіг. 1 приставкою 8 є кукурудзорізальний пристрій. На його місці можуть бути встановлені інші види приставок, наприклад, для скошування стоячих зелених рослин або для підбирання скошеного сіна, що лежить в копнах. Подрібнювальний блок 10 містить приведений у обертальний рух барабан 16 подрібнювача, який встановлюють на подрібнювальні ножі 18, рівномірно розподілені по периферії. Обертальні 2 UA 114801 C2 5 10 15 20 25 30 35 40 45 50 55 ножі 18 подрібнювача утворюють різальний зазор разом з фіксованим місцем розташування різальної крайки 20 добре поєднуваної деталі-аналога, де поданий матеріал врожаю розрізають за допомогою транспортуючих роликів 22. Як зрозуміло з перспективного виду барабана 16 подрібнювача, представленого на фіг. 2, ножі 18 подрібнювана кожен знаходяться тільки з лівої або правої половини барабана 16 подрібнювача, при цьому кожен зміщено відносно один одного в окружному напрямку на центральній площині барабана 16 подрібнювача на половину відстані кожного ножа при рознесенні. Крім того, різальні крайки 48 ножів 18 подрібнювача орієнтовані з перекосом відносно осі обертання 24 барабана 16 подрібнювача, так що в ході обертання барабана 16 подрібнювача, точки, в яких ножі 18 подрібнювача та фіксовано розташована різальна крайка 20 деталі-аналога перетинають одне одного, переміщуються в осьовому напрямку. У зв'язку з тим, що ножі 18 подрібнювача, таким чином, кожний виконує різання тільки в кожній окремій точці, ризик закупорки барабана 16 подрібнювача через надмірну подачі матеріалу зібраного врожаю зменшується. Пристрій 28 для контролю гостроти різальної крайки подрібнювальних ножів 18 містить джерело світла 36, у даному прикладі це - лазер 37, і камеру 44. Лазер 37 випромінює пучок 38 в напрямку одного з ножів 18 подрібнювача. Оптичний пристрій, що формує пучок представлено циліндричною лінзою 40, розташованою між лазером 37 і ножем 18 подрібнювача для того, щоб розкрити пучок 38 в площині, яка перетинає ніж 18 подрібнювача. Розкритий пучок 38 освітлює опорну лінію 52 на поверхні ножа 18 подрібнювача, що перетинає різальну крайку 48 ножа 18 подрібнювача. Камера 44 налаштована для того, щоб контролювати положення опорної лінії 52 під ненульовим кутом до площини розкритого променевого пучка 38, зазвичай, під кутом між 45 і 135°. У лівій частині фіг. 3 показано ніж 18 подрібнювана і опорну лінію 52, спроектовану на нього із застосуванням кута огляду камери 44. Якщо дивитися у цьому напрямку, профіль опорної лінії 52 віддзеркалює перетин ножа 18 подрібнювана. Ніж подрібнювача має дві плоскі бокові поверхні 50 з обох сторін різальної крайки 48, при цьому прямолінійна ділянка 61 опорної лінії кожна поширюється на обидві сторони 50. У правій частині фіг. 3 у збільшеному масштабі показано деталь ножа 18 подрібнювана з опорною лінією 52. Можна бачити, що різальна крайка 48 має не нульову ширину, і що ділянки лінійної форми 61 не перетинають одна одну на різальній крайці 48 під гострим кутом, але з'єднані за допомогою вигнутої ділянки 60. Блок 62 обробки зображення (див. фіг. 2), підключений до камери 44, передбачений для того, щоб оцінити гостроту різальної крайки 48 із застосуванням профілю опорної лінії 52, зокрема її вигнутої ділянки 60 в зображеннях, наданих камерою 44. Така оцінка гостроти може, наприклад, включати розрахунок найменшого радіуса кривизни r вигнутої ділянки 60. Чим менше визначений радіус кривизни r, тим гострішою є різальна крайка 48; коли найменший радіус кривизни r перевищує граничне значення, то з цього можна зробити висновок, що різальна крайка 48 є затупленою і має бути загострена. Інша можливість полягає в екстраполяції ділянок 61 лінійної форми опорної лінії 52 лінійно до точки перетину в блоці 62 оцінки зображення, як показано на фіг. 3 за допомогою пунктирної лінії 58, і обчислення відстані d між точкою перетину ліній 58 і вершиною вигнутої ділянки 60 або відстані між точкою перетину ліній 58 і точкою вигину 60, яка знаходиться поруч і є суміжною. У даному випадку також велике значення відстані d вказує на затуплення різальної крайки 48, так що, коли відстань d перевищує граничне значення, виконується повторне шліфування. Опорна лінія 52 не вимагає повного перебування в полі зору камери 44; очевидно, достатньо і того, щоб камера 44 в кожному випадку була тільки в стані побачити частину лінійної ділянки 61, при цьому тривалість такого бачення має бути настільки довгою, щоби бути в змозі визначити і екстраполювати напрямок ділянок 61. Для розрахунку найменшого радіусу кривизни r достатньо навіть, коли тільки вигин 60 входить в зображення камери 44. Фіг. 4 показує реальне зображення, яке надане камерою 44 для ілюстрації. Інтенсивна, але через зношення ножа 18 подрібнювача нерегулярна права лінія є опорною лінією 52, що проектується на ніж 18 лазером 37. Ділянки 61 лінійної форми, що проходять з боків 50 мають бути чітко відокремлені від вигину 60, що їх сполучає. Дві тонкі лінії 58 додаються за допомогою блоку 62 оцінки зображення у розширенні лінійних ділянок 61, щоб визначити точку перетину, від якої потім визначається відстань d до вигину 60. За допомогою збільшеного фрагмента фіг. 1, фіг. 5 демонструє можливості встановлення пристрою 28 контролю гостроти різальної крайки в польовому подрібнювачі 1. Як правило, джерело світла 36 і камера 44 повинні бути розташовані поза шляхом переміщення 3 UA 114801 C2 5 10 15 20 25 30 35 40 45 50 55 60 подрібненого матеріалу, тобто на верхній половині подрібнювального барабана 16 таким чином, щоби подрібнений матеріал не блокував шлях світла і не перешкоджав виконувати вимір. Оскільки, зазвичай, є необхідність у наявності інтервалу для шліфувального пристрою 46 для заточування ножів 18, гострота різальної крайки яких контролюється пристроєм 28, в залежності від напрямку обертання барабана 16 подрібнювача (у напрямку проти годинникової стрілки на фіг. 5), цей пристрій може бути розміщений на його периферії перед шліфувальним пристроєм 46, так щоби джерело світла 36 світило похило зверху на подрібнювальний ніж 18, що рухається вгору, або він може бути розміщений над транспортуючими роликами 22, щоби джерело світла 36 освітлювало похило спереду подрібнювальний ніж 18, що рухається вперед. Відповідно до конфігурації, показаної на фіг. 6, контрольний пристрій 28 для моніторингу гостроти різальної крайки встановлено з можливістю переміщення по направляючому пристрою 26, що проходить паралельно осі обертання 24 барабана 16 подрібнювача. Джерело світла 36, тобто лазер 37, циліндрична лінза 40, камера 28 і тригерний пристрій 41, у даному випадку у вигляді датчика ножа 42, розміщені в корпусі 29, встановленому на направляючому пристрої 26. Як альтернатива, джерело світла 36 і камера 44 можуть бути розміщені в окремих корпусах, але вони повинні переміщатися спільно і в фіксованому положенні відносно одне одного вздовж направляючого пристрою 26, так щоби опорна лінія 52 завжди знаходилася в полі зору камери 44. На нижній стороні, зверненій до барабана 16 подрібнювача, корпус 29 має отвір 30, що закривається. У зображенні на фіг. 6 схематично показано дві куліси 32, що мають можливість керованого паралельного переміщення по рейках, які не показані, при цьому вони можуть бути розміщені перед отвором 30 для його щільного блокування, коли пристрій 28 не використовується, причому вони захищають внутрішню порожнину корпусу 29 від проникнення подрібненого матеріалу, іскор, що розлітаються під час можливої переточки ножів 18 подрібнювача, та інших забруднень. Закриття отвору 30 може бути достатнім для захисту порожнини корпусу від забруднень, коли вимірювання гостроти різальної крайки здійснюються при нерухомому барабані 16. Однак для того, щоб звести до мінімуму перерви в роботі транспортного засобу, переважним є виконання вимірювання гостроти різальної крайки під час роботи барабана 16 в режимі подрібнення. Для того щоб запобігти або звести до мінімуму проникнення подрібненого матеріалу в корпус 29 і в цьому випадку, корпус 29 з'єднаний з джерелом стисненого повітря через гнучкий шланг 34. Коли отвір 30 відкривається для вимірювання, стиснене повітря, що подається через шланг 34, виходить з корпусу 29 через вказаний отвір, при цьому продовжується розвантаження подрібненого матеріалу з внутрішньої порожнини корпусу 29. Циліндрична лінза 40 і камера 44 розташовані по різні сторони від уявної площини 56, що проходить перпендикулярно до різальної крайки 48 і через освітлену поверхневу область 52. Площина поширення променевого пучка 38 і напрямок, в якому камера 44 націлена на різальну крайку 48, визначають кут α, який у цьому випадку становить, приблизно 90°. Коли для аналізу стану подрібнювального ножа 18 барабана 16, з метою визначення гостроти його різальної крайки, обертання барабана 16 подрібнювача припиняється, пристрій 28 може бути зміщено на подрібнювальному ножеві 18 вздовж направляючого пристрою 26 таким чином, що джерело світла проектує опорну лінію 52 в різних місцях подрібнювального ножа 18, а камера 44 записує зображення відповідної опорної лінії 52, що там спроектована, завдяки чому може бути записана гострота різальної крайки 48 на відповідному освітленому місці. На практиці таким чином записані значення усереднюють перед порівнянням їх з еталонним значенням для запобігання ситуації, коли розташування надзвичайно сильного або зовсім незначного зношення різальної крайки кромки 48 застосовується в якості бази для прийняття рішення про переточку ножа. Блок 62 оцінки зображення може прийняти рішення щодо необхідності повторного шліфування ножа безпосередньо за допомогою певного значення гостроти різальної крайки і, за необхідності, запустити шліфувальний пристрій 46 в експлуатацію; при цьому результат вимірювання просто може бути переданий на дисплейний прилад 64 (див. фіг. 1) в кабіні водія польового подрібнювача для того, щоб залишити рішення про повторне шліфування за водієм. На практиці, переважно, є сенс проводити контроль гостроти різальної крайки на барабані 16, що знаходиться у стані обертання. Будь-яка розмитість генерованих зображень в результаті руху ножа 18 в такому випадку може бути обмежена тим, що використовується адекватно коротка витримка камери 44 (переважно не більше 5 мкс при швидкості обертання барабана подрібнювача 1200 оборотів за хвилину) і/або тим, що джерело світла 36 працює в імпульсному режимі. Зокрема, коли джерелом світла 36, як згадано вище, є лазер 37, тривалості імпульсів порядку мікросекунд або менше можуть бути реалізовані без будь-яких проблем. Сенсор 42 4 UA 114801 C2 5 10 15 20 25 30 35 40 45 50 55 60 ножа встановлено для запису проходження ножа 18 подрібнювача через задану точку перед отвором 30 корпусу 29 і в цьому зв'язку запустити камеру 44 для запису зображення або, у випадку, коли джерело світла 36 працює в імпульсному режимі, генерувати імпульс світла. У конфігурації, показаній на фіг. 6, застосовано сенсор 42 ножа для запису проходження саме заданої області різальної крайки 48 подрібнювального ножа 18, де потім проектується опорна лінія 52 джерелом світла 36. Таким чином, забезпечується те, що опорна лінія 52 в зображеннях камери 44 завжди знаходиться в одному й тому ж місці, незалежно від того, де знаходиться пристрій 28: чи на лівій, чи на правій половині барабана 16 подрібнювача, а також від того, з яким ступенем перекосу, якщо такий є, орієнтовані подрібнювальні ножі 18. Як альтернатива, може бути передбачено встановлення двох сенсорів 42 ножів, а саме, ліворуч і праворуч від позиції сенсора 42 ножа, показаної на фіг. 3, з яких один застосовується, коли пристрій 28 знаходиться на лівій половині барабана 16 подрібнювача, а інший застосовується, коли пристрій знаходиться на його правій половині. Також існує можливість застосування сенсора кута обертання, розташованого безпосередньо на осі барабана 16 подрібнювача, як тригерного пристрою 41 для формування зображення, однак при цьому має бути прийнятий до уваги перекіс положення подрібнювальних ножів 18 через змінну величину затримки між тригерним сигналом, що запускає сенсора кута обертання, і генеруванням зображення як функції позиції пристрою 28 уздовж осі 24. Для того щоб виконати обстеження гостроти різальної крайки на всіх ножах 18 барабана 16, існує можливість для барабана 16, що знаходиться у стані обертання, переміщувати пристрій 28 безперервно вздовж направляючого пристрою 26 по всій довжині барабана 16 і в процесі записувати зображення при кожному проходженні ножа 18 перед пристроєм 28. Оскільки виявлені ножі 18 періодично повторюються в послідовності зображень, що надаються камерою 44, в блоці 62 оцінки зображення можна в кожному випадку ідентифікувати зображення відносно ножа 18 і згодом оцінювати гостроту різальної крайки даного ножа за допомогою безлічі зображень, отриманих якраз для цього ножа 18, і індивідуально приймати рішення про необхідність переточки для кожного окремого ножа. Проте, ідентифікація зображень відносно окремих ножів 18 також може бути опущеною, і замість цього, обчислене середнє значення за допомогою всіх значень гостроти різальної крайки, отриманих на базі зображень, і прийняте єдине рішення щодо повторного шліфування для всіх ножів 18 барабана 16. Таким чином, частота, 3 якою процес збирання врожаю має бути перерваний для переточки ножів 18, може бути скороченою, що в цілому забезпечує більшу його ефективність. Перелік посилань 1 польовий подрібнювач 4 шасі 6 рама транспортного засобу 8 приставка для підбирача (для збирання) 10 блок подрібнювача 12 постакселератор 14 розвантажувальний жолоб (пристрій) 15 двигун 16 барабан подрібнювача 18 ніж подрібнювача 20 різальна крайка деталі-аналога 22 транспортуючий ролик 24 вісь обертання 26 направляючий пристрій 28 пристрій 29 корпус 30 отвір 32 куліса 34 шланг 36 джерело світла 37 лазер 38 промінь (променевий пучок) 40 циліндрична лінза 41 тригерний пристрій 42 сенсор ножа 44 камера 46 шліфувальний пристрій 5 UA 114801 C2 5 10 48 різальна крайка 50 поверхня ножа 51 лінія 52 опорна лінія (ось координат) 56 площина 58 нога (лапа, опора) 60 ділянка вигнутої форми 61 ділянка лінійної форми 62 блок обробки (оцінки) зображення 64 дисплейний прилад ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 1. Пристрій для контролю гостроти різальної крайки ножа (18) з джерелом (36) світла для освітлення ножа (18) і камерою (44) для записування зображень ножа (18), який відрізняється тим, що джерело (36) світла виконане з можливістю проектування на ніж (18) принаймні однієї опорної лінії (52), що перетинає різальну крайку (48) ножа (18) у полі зору камери (44), при цьому опорна лінія (52) аналізується для генерації індикації гостроти різальної крайки. 2. Пристрій за п. 1, який відрізняється тим, що опорною лінією (52) є освітлена лінія, з обох сторін якої знаходяться неосвітлені зони. 3. Пристрій за п. 2, який відрізняється тим, що на шляху світла від джерела (36) світла до ножа розташований циліндричний оптичний елемент (40) або оптичний елемент, що виконаний з можливістю обертання. 4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що джерелом (36) світла є лазер (37). 5. Пристрій за будь-яким з пп. 1-4, який відрізняється тим, що джерелом (36) світла є імпульсне джерело світла. 6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що ніж (18) встановлений на барабані (16), що обертається і запускає тригерний пристрій (42) для синхронізації роботи камери (44) та/або імпульсного джерела (36) світла, що функціонально пов'язаний з обертанням барабана (16). 7. Пристрій за будь-яким з пп. 1-6, який відрізняється тим, що джерело (36) світла і камера (44) встановлені на опорі, яка може переміщатися уздовж різальної крайки (48). 8. Пристрій за будь-яким з пп. 6, 7, який відрізняється тим, що тригерний пристрій (42) змонтований на тій же самій опорі. 9. Пристрій за будь-яким з пп. 7, 8, який відрізняється тим, що загальною опорою є корпус (29), в якому розміщуються джерело (36) світла і камера (44). 10. Пристрій за будь-яким з пп. 1-9, який відрізняється тим, що містить елемент засувки (32), що є рухомим і може бути розміщений між джерелом (36) світла і ножем (18) та/або між камерою (44) і ножем (18). 11. Пристрій за будь-яким з пп. 1-10, який відрізняється тим, що джерело (36) світла і/або камера (44) розміщені у корпусі (29), який може бути заповнений стиснутим газом. 12. Пристрій за будь-яким з пп. 1-11, який відрізняється тим, що напрямок падіння світла (46) на різальну крайку (48) і оптична вісь камери (44) на різальну крайку визначає кут (α), що становить щонайменше 45° і не більше 135°, більш переважно від 60° до 90°. 13. Спосіб контролю гостроти різальної крайки ножа (18), що включає операції, при яких: - проектують принаймні одну опорну лінію (52) на ніж (18), яка перетинає різальну крайку (48) ножа (18); - записують зображення опорної лінії (52); - оцінюють гостроту різальної крайки, залежно від форми записаного зображення опорної лінії (52). 6 UA 114801 C2 7 UA 114801 C2 8 UA 114801 C2 Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори російськоюMADSEN TOMMY ERTBOLLE, Kildeby Allan, Huster Jochen
МПК / Мітки
МПК: A01D 43/08, A01F 29/09
Мітки: крайки, спосіб, контролю, гостроти, пристрій, різальної
Код посилання
<a href="https://ua.patents.su/11-114801-pristrijj-ta-sposib-kontrolyu-gostroti-rizalno-krajjki.html" target="_blank" rel="follow" title="База патентів України">Пристрій та спосіб контролю гостроти різальної крайки</a>
Пристрій для вимірювання лінійного зношення різальної крайки інструментів
Номер патенту: 111240
Опубліковано: 10.11.2016
Автори: Д'яконов Віктор Кузьмич, Сірко Зіновій Степанович
МПК: G01N 3/58
Мітки: зношення, лінійного, вимірювання, різальної, пристрій, інструментів, крайки
Формула / Реферат:
Пристрій для вимірювання лінійного зношення різальної крайки інструментів, що має скобу, індикатор годинникового типу, насадку, який відрізняється тим, що скоба виконана у вигляді П-подібної форми із пласкою базовою поверхнею і пластиною, що регулюється за висотою та обмежує у вертикальній площині зазор переміщення різальної крайки.
Ніж різальної пари “ніж-решітка” м’ясорубки
Номер патенту: 61936
Опубліковано: 10.08.2011
Автори: Зюзін Юрій Борісовіч, Шелковий Євген Олексійович
МПК: B26B 1/00
Мітки: різальної, ніж-решітка, м'ясорубки, пари
Формула / Реферат:
1. Ніж різальної пари "ніж-решітка" м'ясорубки, що містить отвір для насаджування на шнек, лопаті, різальні крайки, який відрізняється тим, що фронтальну поверхню лопаті ножа виконано у вигляді площини, нахиленої вперед по ходу руху лопаті, причому кут нахилу дорівнює куту нахилу осі отвору решітки та складає 45°, а в нижній частині фронтальної площини лопаті виконано різальну крайку у вигляді кутового виступу вперед відносно...
Ніж різальної пари “ніж-решітка” м’ясорубки
Номер патенту: 97744
Опубліковано: 12.03.2012
Автори: Шелковий Євген Олексійович, Зюзін Юрій Борісовіч
МПК: B02C 18/30, B02C 18/36
Мітки: різальної, ніж-решітка, пари, м'ясорубки
Формула / Реферат:
1. Ніж різальної пари "ніж-решітка" м'ясорубки, що містить отвір для насаджування на шнек, лопаті, різальні крайки, який відрізняється тим, що фронтальну поверхню лопаті ножа виконано у вигляді площини, нахиленої вперед за ходом руху лопаті, причому кут нахилу дорівнює куту нахилу осі каналу решітки та складає 45°, а в нижній частині фронтальної площини лопаті виконано різальну крайку у вигляді кутового виступу вперед відносно...
Пристрій для визначення гостроти зору
Номер патенту: 54111
Опубліковано: 25.10.2010
Автор: Кисельов Павло Афанасійович
МПК: A61B 3/00
Мітки: зору, визначення, гостроти, пристрій
Формула / Реферат:
1. Пристрій для визначення гостроти зору, що містить корпус з таблицею оптотипів Сівцева з літерами і кільцями Ландольта на задній стороні та внутрішніми бічними дзеркальними поверхнями і освітлювач, який відрізняється тим, що корпус виконано закритим і додатково оснащеним таблицею оптотипів Орлової, а освітлювач розташований на задній стороні корпусу і містить щонайменше одну люмінесцентну лампу.2. Пристрій для визначення гостроти...
Спосіб визначення гостроти зору
Номер патенту: 67919
Опубліковано: 15.07.2004
Автор: Швед Андрій Миколайович
МПК: A61B 3/032
Мітки: спосіб, визначення, зору, гостроти
Формула / Реферат:
Спосіб визначення гостроти зору, який включає проведення тестової проби на здатність органа зору розрізняти деталі оптотипу під кутом зору в 1 мінуту в стандартних умовах освітлення, який відрізняється тим, що оптотипи представляють білими на чорному фоні.
Попередній патент: Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки та пристрої, які застосовуються при цьому
Наступний патент: Генерування додаткових кандидатів для злиття
Випадковий патент: Ди-(1-карбокси-3-метилтіопропілоксамоїл)-сульфаніламід, який проявляє антиалергійну та гепатозахисну активність