Поліпшений шків для високоефективної лебідки
Формула / Реферат
1. Поліпшений шків (2) для лебідки, який контактує щонайменше з однією ділянкою троса (1), що міститься між вхідною ділянкою (11), пов'язаною з робочим навантаженням, і вихідною ділянкою (12), із мінімальним або нульовим натягом, при цьому зазначений покращений шків (2) містить кінематичний ланцюжок, сформований із периферійних опор (3), причому кожна із зазначених периферійних опор (3) є шарнірним чотирикутником, що складається щонайменше з однієї рами (31), суцільної щонайменше з одним диском (21), щонайменше одного кривошипа (32), щонайменше однієї балансирної тяги (33) і щонайменше однієї сполучної тяги (34), яка перебуває в контакті з зазначеною ділянкою зазначеного троса (1), при цьому кожна одна з зазначених периферійних опор (3) пов'язана з двома із зазначених суміжних периферійних опор (3) через сполучення вилок (323, 324), суцільних із зазначеним кривошипом (32), відповідно, із першою вилкою (324а), суцільною з першим суміжним кривошипом (32а), із другою вилкою (323b), суцільною з другим суміжним кривошипом (32b).
2. Поліпшений шків (2) за п. 1, який відрізняється тим, що кожній із зазначених периферійних опор (3) надається рух за допомогою двигуна відповідно до закону зворотно-поступального руху.
3. Поліпшений шків (2) за п. 1, який відрізняється тим, що зазначений кривошип (32) складається з ексцентрика (321) втулкового типу, внутрішню вісь якого займає штир 322, на кінцях якого розташовані зазначені вилки (323, 324), та в якому зазначені вилки (323, 324) геометрично виконані з можливістю зсуву (Т) відносно площини, перпендикулярної до зазначеної осі зазначеного штиря (322).
4. Поліпшений шків (2) за п. 3, який відрізняється тим, що зазначений зворотно-поступальний і компенсований рух кожної однієї із зазначених периферійних опор (3) виконується за посередництва механізму, кінематично еквівалентного шарнірному п'ятибічному пристрою.
5. Поліпшений шків (2) за п. 4, який відрізняється тим, що дві з п'яти тяг, що складають зазначений шарнірний п'ятибічний пристрій, механічно виконані за допомогою ексцентрикових роторів, які мають незалежні швидкості обертання і заздалегідь визначені фази, причому одна із зазначених незалежних швидкостей обертання втричі більша за іншу.
6. Поліпшений шків (2) за одним із попередніх пунктів, який відрізняється тим, що радіальний профіль кожної однієї з зазначених периферійних опор (3), вимірюваний у площині X-Z, паралельній осі обертання зазначеного шківа (2), підпорядковується експонентній залежності, прийнятій для градієнта натягу, що змінюється уздовж зазначеного троса (1).
7. Поліпшений шків (2) за будь-яким із попередніх пунктів, який відрізняється тим, що задня поверхня кожної однієї із зазначених сполучних тяг (34), що перебуває в контакті з ділянкою зазначеного троса (1), має профіль, вимірюваний у площині X-Y, перпендикулярній зазначеній осі обертання, із округленою по окружності формою.
8. Поліпшений шків (2) за будь-яким із попередніх пунктів, який відрізняється тим, що зазначений кінематичний ланцюжок, сформований із зазначених периферійних опор (3), пов'язаний за допомогою карданних шарнірів або їхніх еквівалентів, і/або зазначений зворотно-поступальний рух надається за допомогою ексцентриків або механічних приводів, електричних або електромагнітних приладів.
Текст
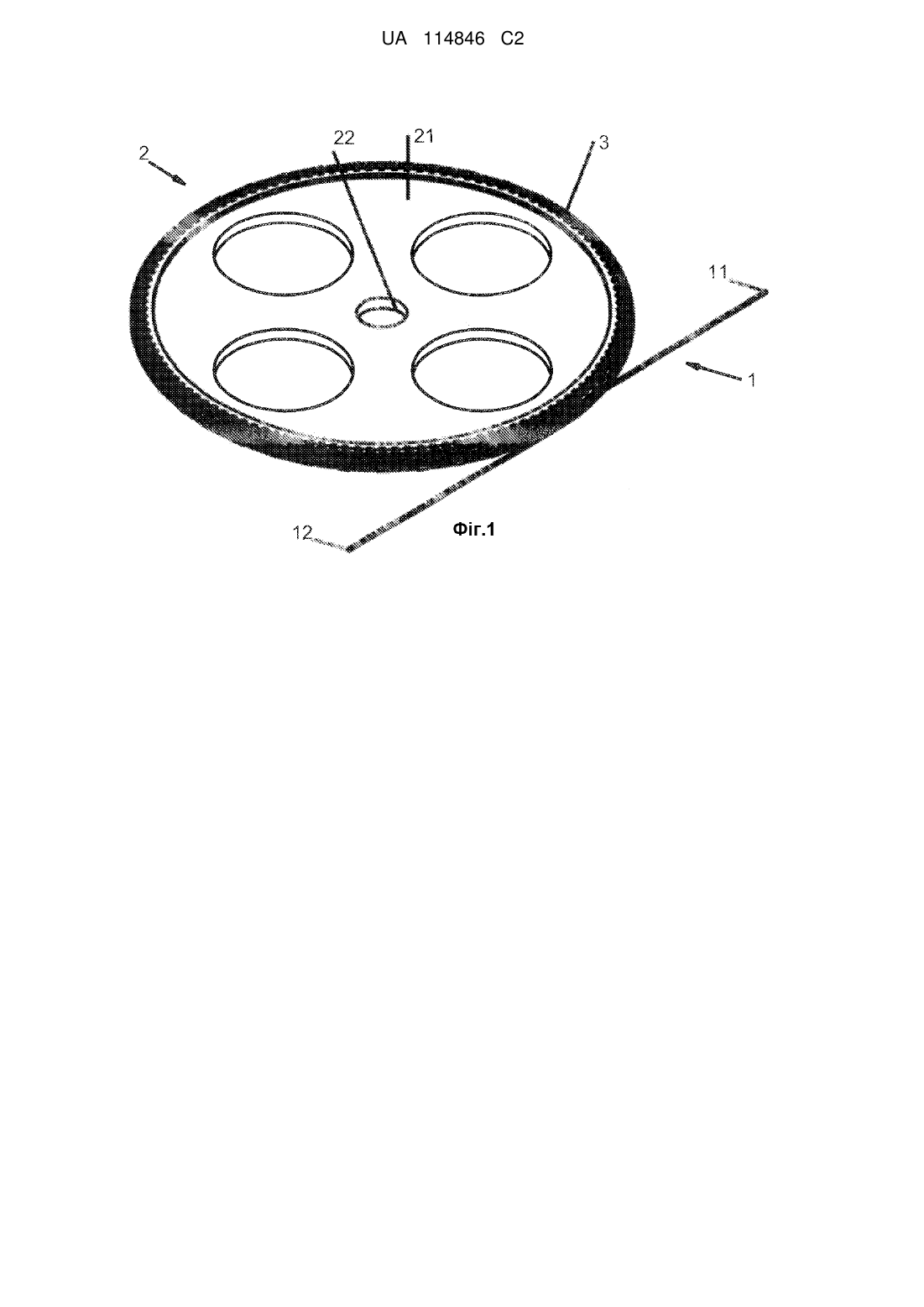
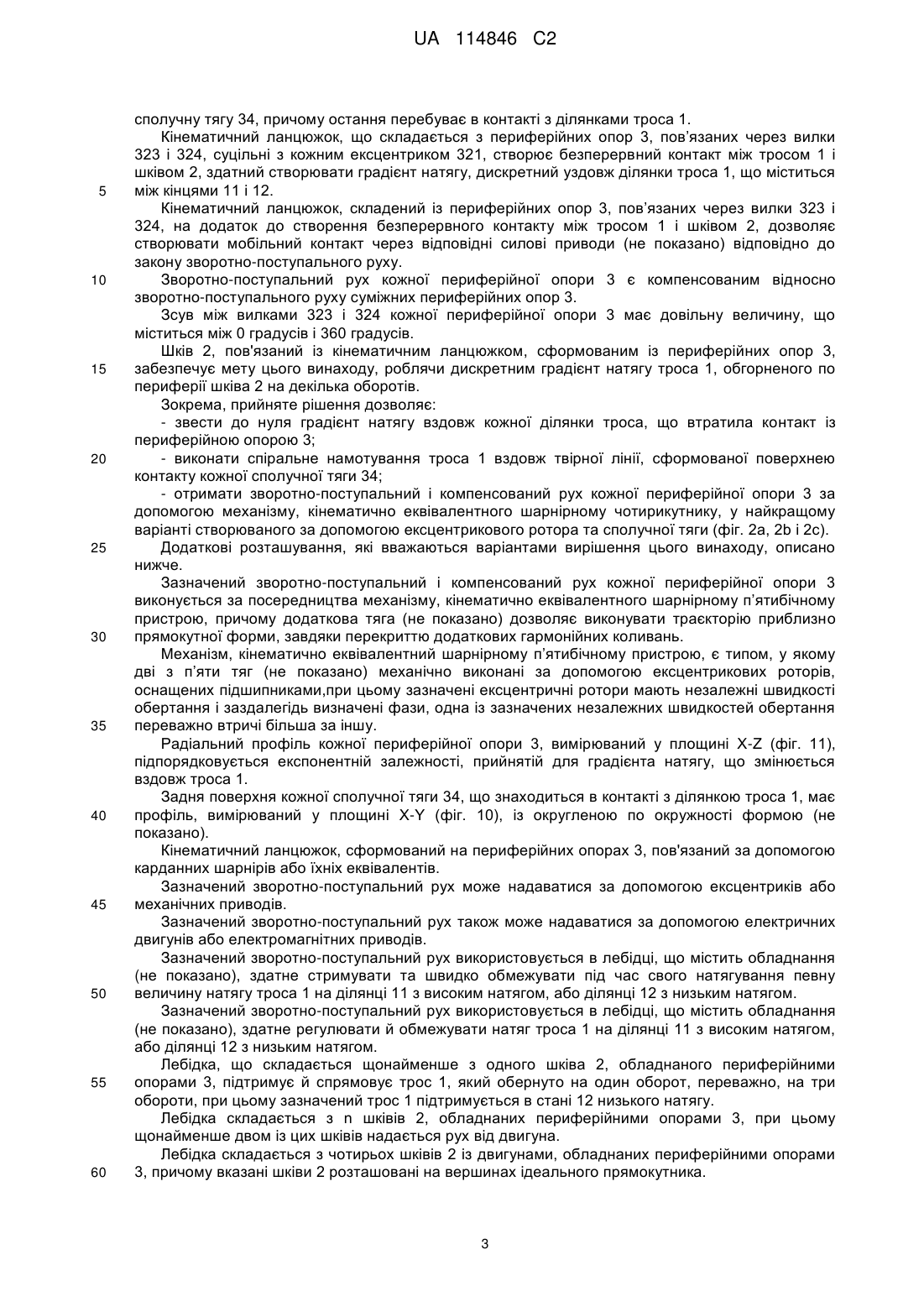
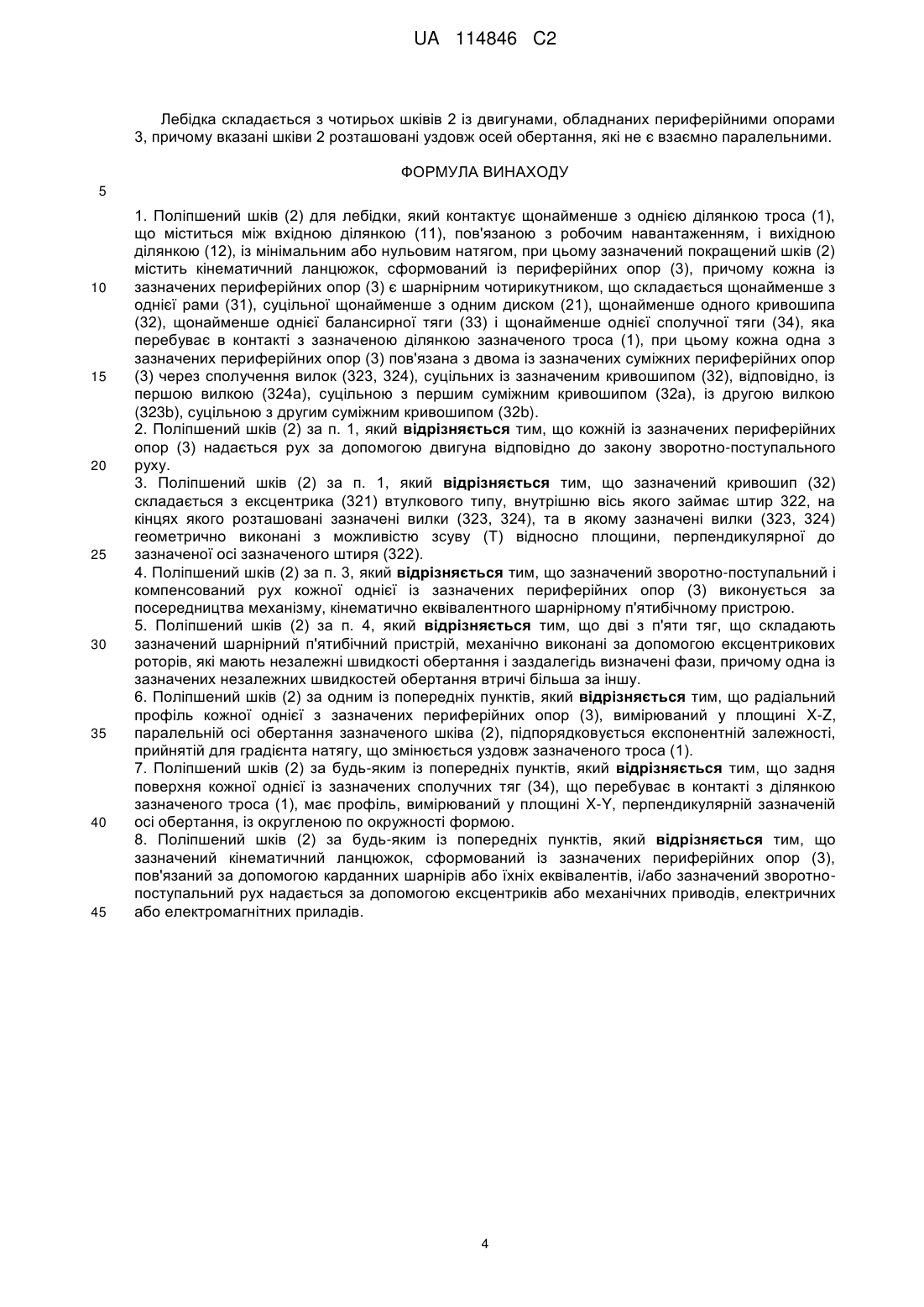
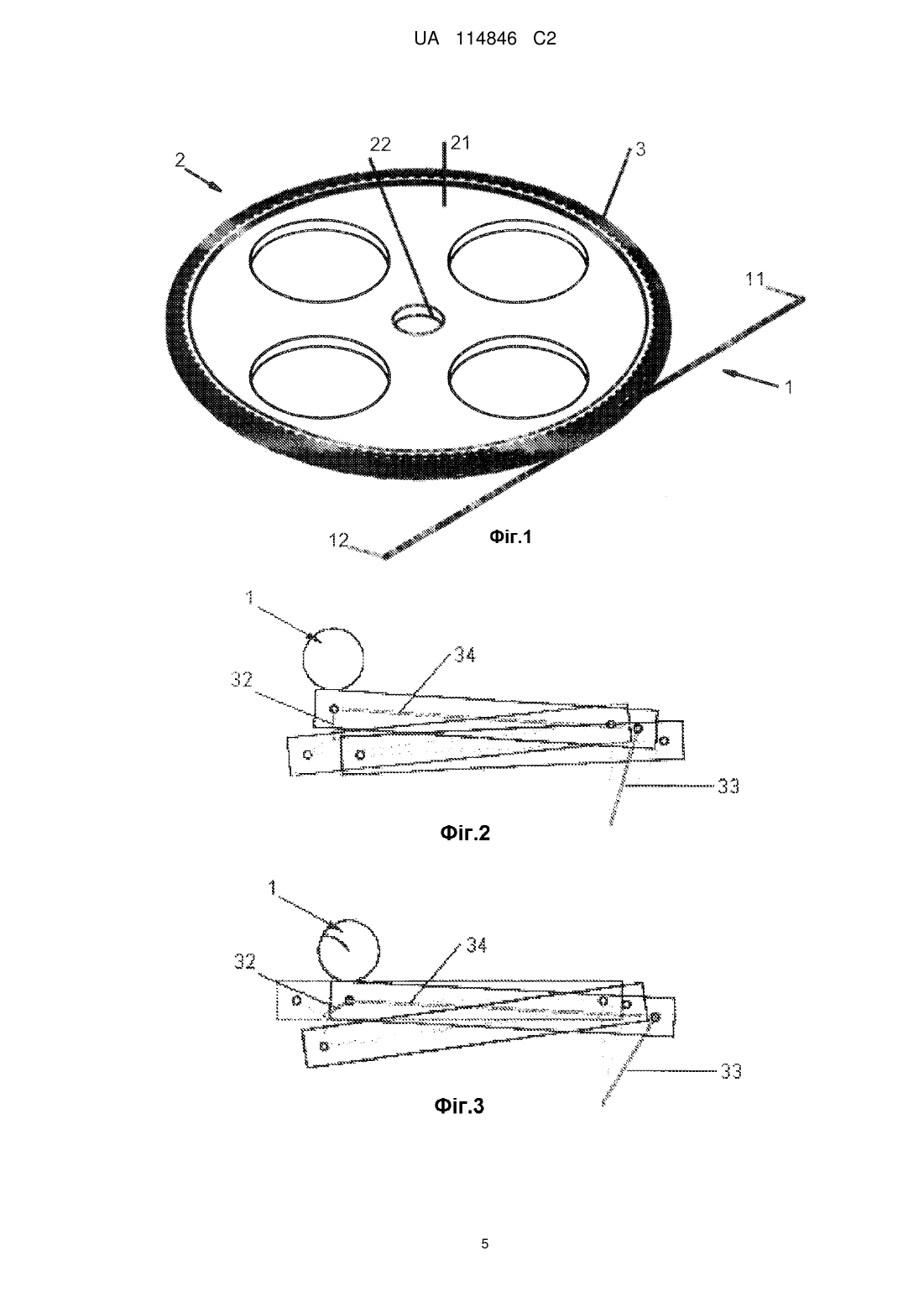
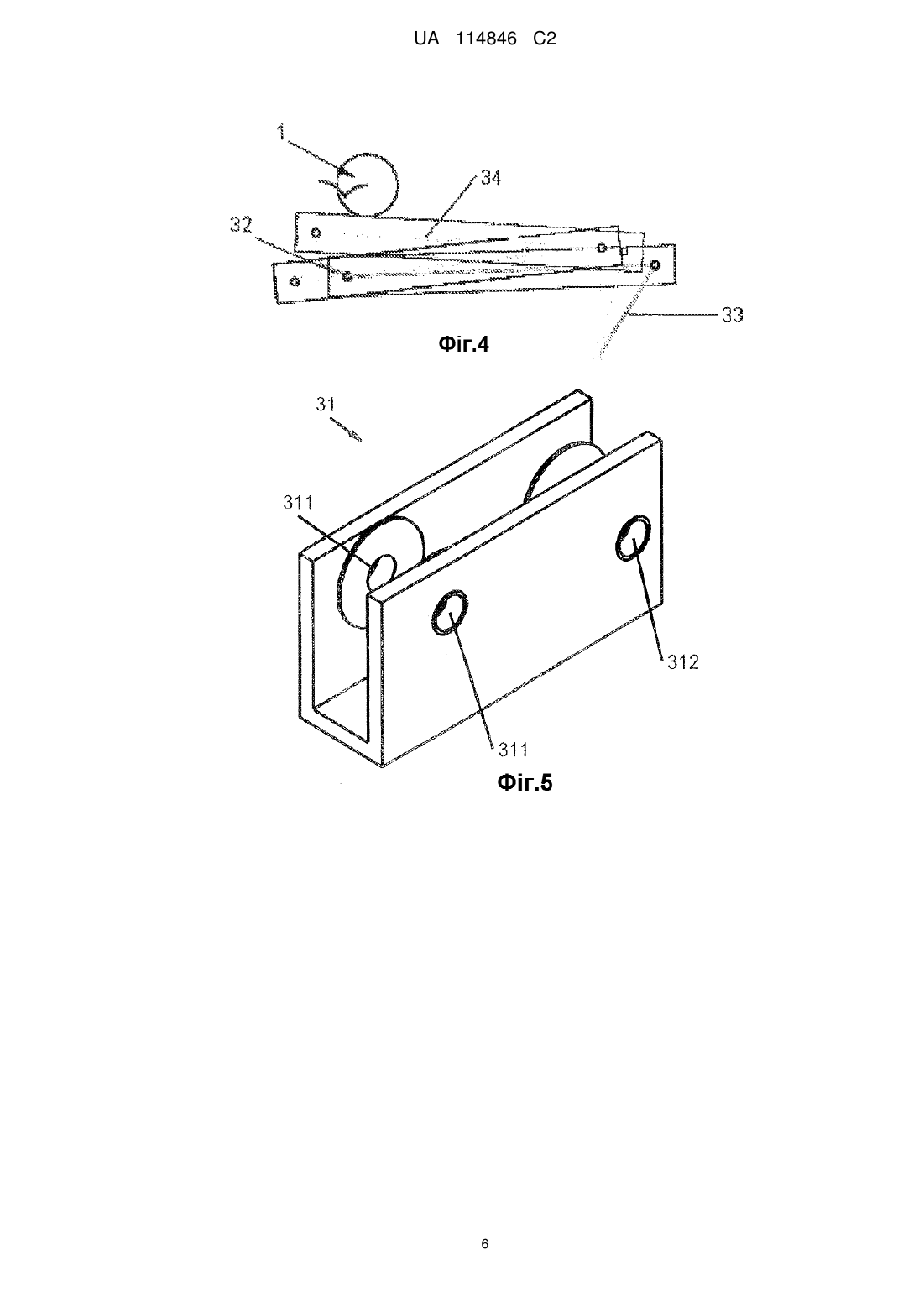
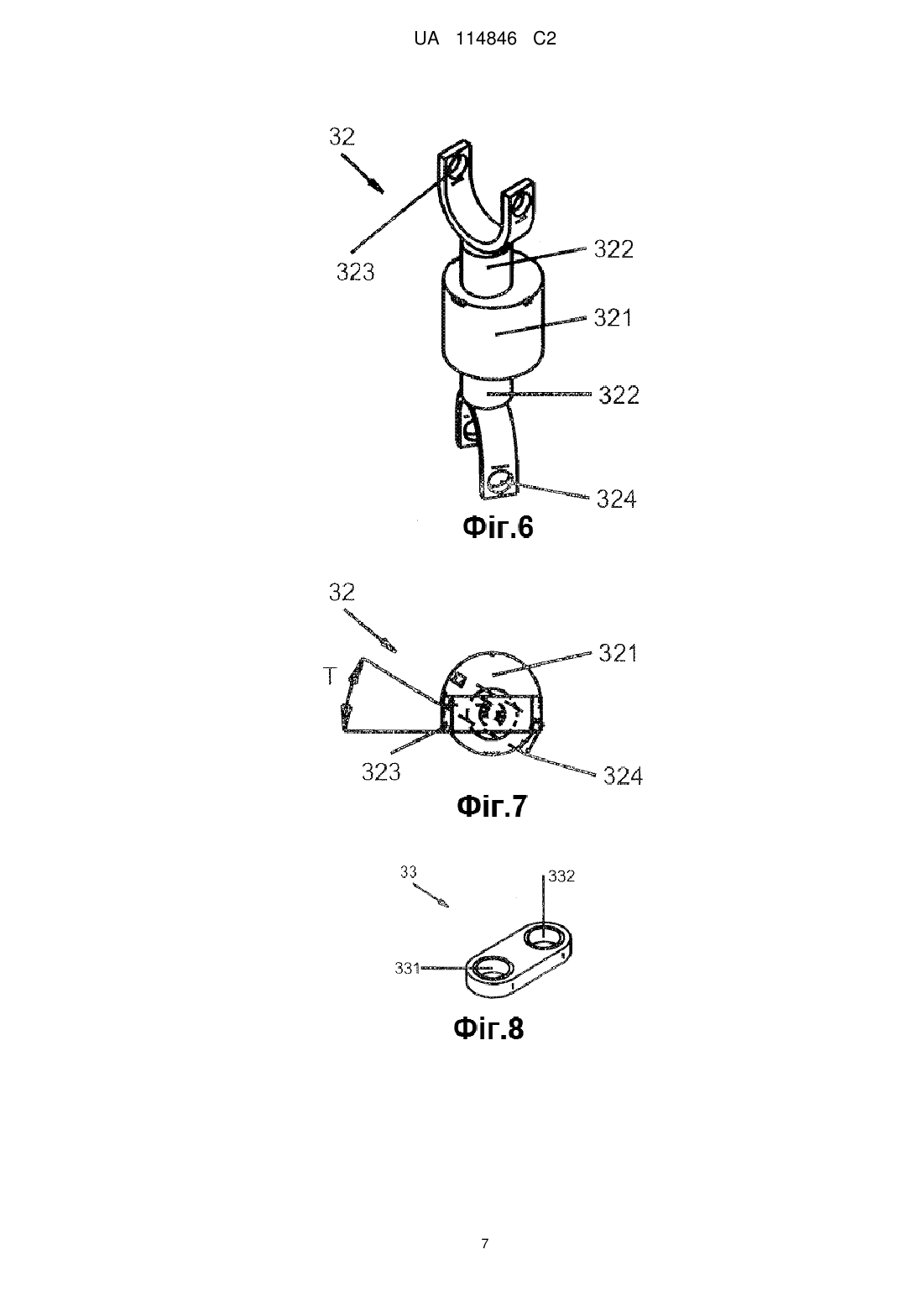
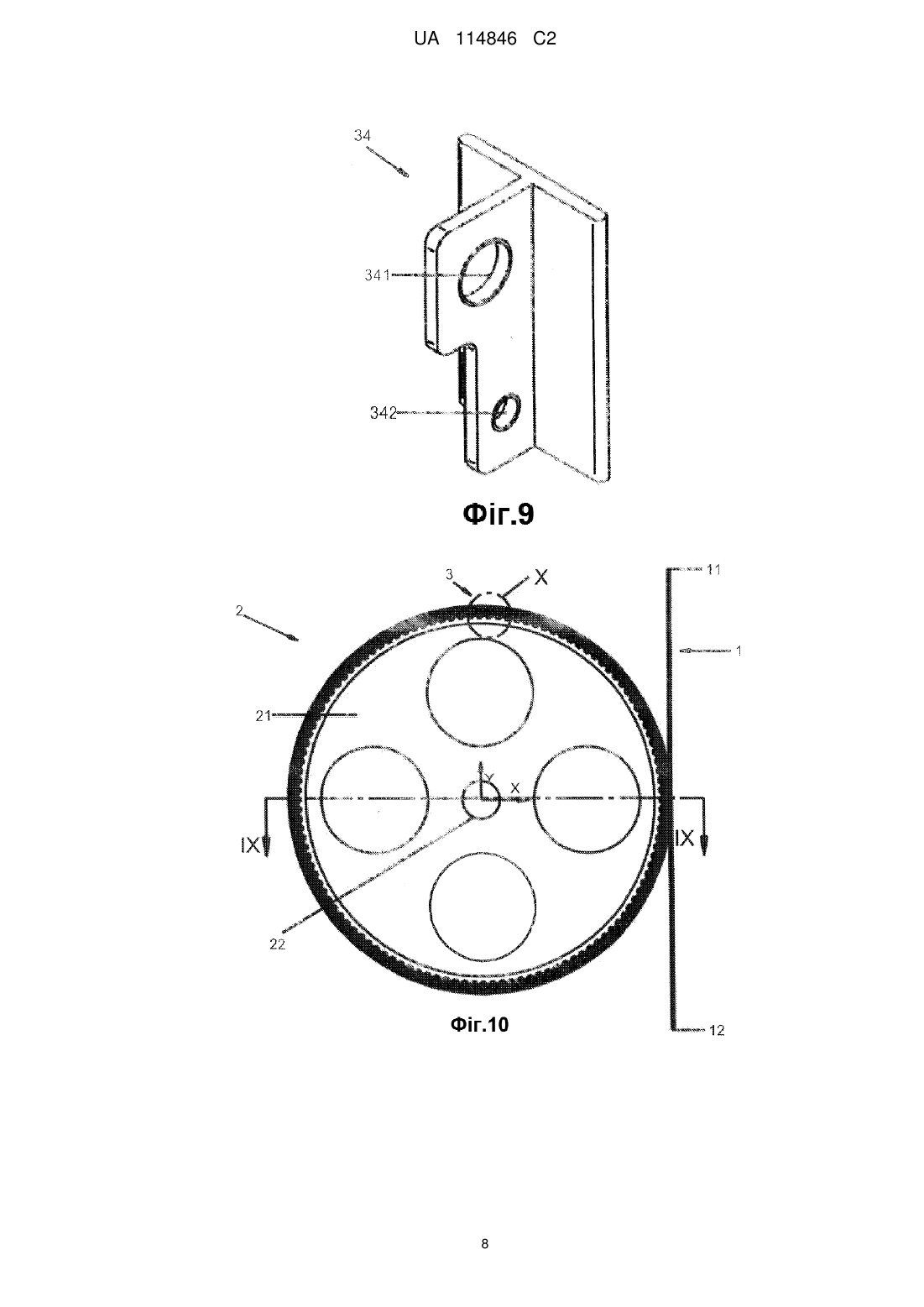
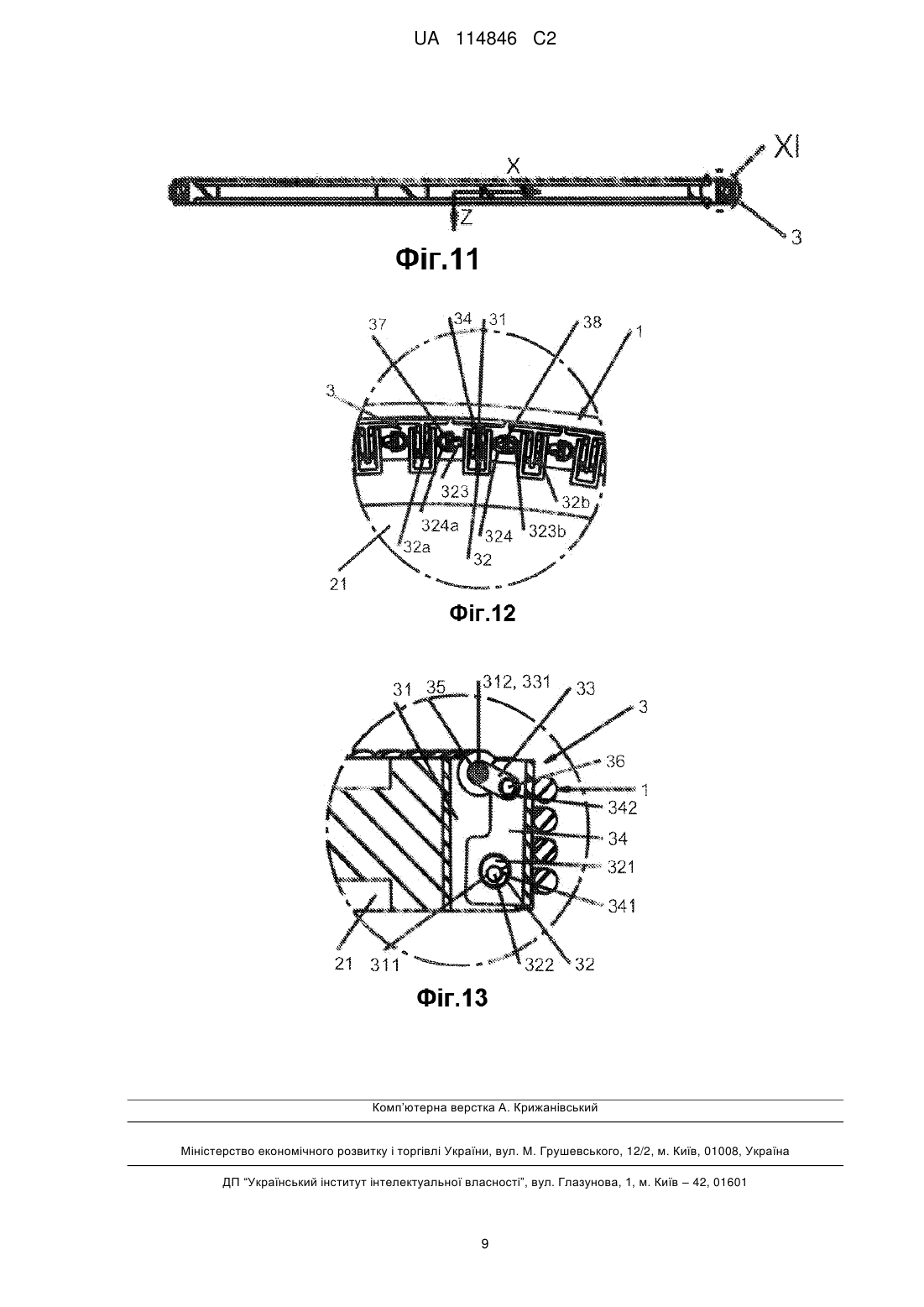
Реферат: Запропоновано поліпшений шків (2) для лебідки, що перебуває в контакті щонайменше з однією ділянкою троса (1), яка міститься між вхідною ділянкою (11), пов'язаною з робочим навантаженням, і вихідною ділянкою (12), із мінімальним або нульовим натягом, причому зазначений шків (2) містить кінематичний ланцюжок, складений із периферійних опор (3). UA 114846 C2 (12) UA 114846 C2 UA 114846 C2 5 10 15 20 25 30 35 40 45 50 55 60 Цей винахід стосується поліпшеного шківа для високоефективної лебідки, типу, використовуваного для передачі механічної енергії за допомогою сил тертя, прикладених до троса, з'єднаного з рухомою навантагою. Високоефективна лебідка використовується в декількох варіантах застосування, для підйому й пересування вантажу, волочіння троса й передачі енергії за допомогою троса, виконаного з можливістю намотування. Останнім часом застосування лебідок для передачі енергії стало важливим в сфері керування енергією вітру, у якій лебідки, з'єднані з генераторами змінного струму й силовим електронним обладнанням, використовуються для відбору кінетичної енергії у вітру та для перетворення отриманої механічної енергії на електричну енергію. Важливий аспект у рекуперації механічної енергії від тросів, пов'язаних із рухомою навантагою, задається ефективністю приводної лебідки, для якої малий відсоток енергії призводить до сильного нагрівання приводних шківів і троса. Процес відбору енергії вітру припускає використання тросів з високим опором. Натяг троса створюється за рахунок підйому змія, що летить, за допомогою поперечного вітру. Шків або барабан, на який намотаний трос, обертається під впливом зусилля, що розмотує, створюваного самим тросом. Механічна енергія створюється за рахунок комбінації механічного натягу в тросі й швидкості, з якою трос натягається при розмотуванні зі шківа. Шків або барабан, на який намотаний трос, обертається під впливом зусилля, що розмотує, створюваного самим тросом. У ході цього процесу кінетична енергія вітру спочатку перетворюється на механічну енергію, внаслідок тертя між тросом і поверхнею контакту шківа або барабана; потім вона перетворюється на електричну енергію за допомогою генераторів змінного струму, з'єднаних з лебідкою. Під час перетворення виникають втрати енергії у вигляді тепла, яке нагріває поверхню контакту шківа й збільшує внутрішню температуру троса, погіршуючи механічні властивості внаслідок перегріву. Звичайні лебідки не підходять для передачі великої кількості енергії внаслідок їхньої низької ефективності. При наявності високоефективної лебідки, обладнаної тросами з високим опором, навіть порівняно невелика частина загубленої енергії може бути критичною. Наприклад, лебідка з ефективністю 97%, використовувана для керування енергією близько 1,5 МВт, створює тепловий потік 45 кВт, який повинен бути відповідним чином розсіяний для запобігання перегріву троса. Разом із втратами, створюваними підшипниками обертових елементів, тепловий потік, головним чином, створюється за рахунок сил тертя між тросом і шківом. Тертя усередині троса створюється за рахунок відносних зсувів і деформацій різних дротів і обплетень, з яких складений трос, розташованих геометрично для взаємного зв'язку. З іншого боку, тертя між тросом і шківом є необхідним інгредієнтом, щоб забезпечити відбір енергії лебідкою від троса, у той час як тертя, залежно від будь-якого відносного зсуву між тросом і шківом, повинне бути знижене до мінімуму. Архітектура високоефективної лебідки повинна відповідати двом концепціям: трос, що переміщається по лебідці, зазнає градієнта натягу, пов'язаного з градієнтом деформації, залежно від природи матеріалу з якого зроблено трос; трос намотується на шків більш ніж на один оборот, припускаючи, що шків, який обертається відносно власної поздовжньої осі, обов'язково повинен переміщатися в напрямку, перпендикулярному напрямку головної сили передачі, наприклад, уздовж поздовжньої осі шківа, щоб перешкоджати перекриттю секцій троса з різною кривизною. У документі WO2011121272 розкритий варіант здійснення, що стосується першої концепції, спрямований на те, щоб зробити більш однорідним градієнт деформації, що робить трос менш напруженим і підданим ефектам деградації. Дану проблему вирішено за допомогою двох спільно діючих шківів, кожний з яких утворює безперервну поверхню контакту між тросом і барабаном. У документі FR1105165 розкрито схему лебідки, що стосується другої концепції, яка містить шківи із циліндричними жолобками, діаметр яких поступово зменшується або збільшується, пристосовуючись до різних станів деформації уздовж троса, так що жолобок з більшим діаметром перебуває в контакті із секцією троса, підданою високому натягу, і навпаки. Метою цього винаходу є вирішення зазначених вище проблем попереднього рівня техніки шляхом створення поліпшеного шківа для високоефективної лебідки, на користь підвищеної продуктивності енергії й зменшення втрат енергії внаслідок явища тертя, і на користь зменшеного зношування троса. Вищезгаданих та інших цілей та переваг цього винаходу, а також результатів, що випливають із наступного опису досягають за допомогою поліпшеного шківа, як заявлено в 1 UA 114846 C2 5 10 15 20 25 30 35 40 45 50 55 60 пункті 1, у контакті із секцією троса, яка міститься між двома кінцями, один з яких пов'язаний із робочою навантагою, а інший має мінімальний або нульовий натяг, який відрізняється тим, що складає кінематичний ланцюжок, сформований із периферійних опор. Кращі варіанти здійснення й неочевидні варіанти цього винаходу є об'єктом залежних пунктів. Передбачається, що всі захищені пункти формули є невід'ємною частиною цього опису. Повинно був бути цілком очевидно, що можуть бути виконані численні зміни й модифікації (наприклад, пов'язані з формою, розмірами, розташуванням і частинами з еквівалентними функціями) описаних елементів, без відступу від обсягу цього винаходу, що очевидно із доданої формули винаходу. Цей винахід буде краще описаний за допомогою деяких кращих варіантів здійснення, наведених в якості прикладів, що не мають обмежувального характеру, з посиланнями на додані креслення, на яких: - на фіг. 1 показано вид в аксонометрії шківа, пов’язаного з тросом, який містить кінематичний ланцюжок периферійних опор, відповідно до цього винаходу; - на фіг. 2, 3 і 4 показано поперечний вид розгортання трьох пов’язаних і суміжних шарнірних механізмів, призначених для взаємодії з периферійними опорами шківа за фіг. 1; - на фіг. 5, 6, 8 і 9 показані види в аксонометрії компонентів, що належать до кожної периферійної опори, пов'язаної зі шківом за фіг. 1; - на фіг. 7 показаний вид спереду компонента за фіг. 6; - на фіг. 10 показаний вид спереду шківа за фіг. 1; - на фіг. 11 показано частковий вид, уздовж площини, що проходить по лінії IX-IX фіг. 10, шківа за фіг. 1; - на фіг. 12 показаний збільшений вузол X, що стосується фіг. 10; - на фіг. 13 показаний збільшений вузол XI, що стосується фіг. 11; Як показано на фіг. 1, щонайменше одна ділянка троса 1, яка міститься між вхідною ділянкою 11 і вихідною ділянкою 12, обернена на три обороти навколо шківа 2. Шків 2 складається щонайменше з одного диска 21, оснащеного центральним отвором 22, використовуваним для центрування й з'єднання з валом (не показано), пов'язаного з високоефективною лебідкою (не показано). Вхідна 11 і вихідна 12 ділянки троса 1, відповідно, пов'язані з робочою навантагою (не показано) і накопичувачем (не показано), залежно від градієнта натягу, який установлює максимальну величину натягу на вхідній ділянці 11, та мінімальну або нульову величину натягу – на вихідній ділянці 12. Диск 21 підтримує кільця троса 1 за допомогою кінематичного ланцюжка, створеного периферійними опорами 3, рівномірно пов’язаними та розподіленими вздовж окружності. Як показано на фіг. 5-9, кожна периферійна опора 3 складається з: - щонайменше однієї рами 31, створеної з екструдованої речовини з U-подібним перерізом, в якій містяться щонайменше дві пари отворів 311 і 312 для втулок; - щонайменше з одного кривошипа 32, виконаного з ексцентрика 321 втулкового типу, внутрішню вісь якого посідає штир 322, на кінцях якого розташовані вилки 323 і 324; - щонайменше з однієї балансирної тяги 33, в якій розміщено два отвори 331 і 332 для втулок; - щонайменше однієї сполучної тяги 34, створеної з екструдованої речовини з T-подібним перерізом, обладнаної щонайменше двома отворами 341 і 342 для втулок. Як показано на фіг. 10-13, кожна периферійна опора 3 є суцільною з периферією диска 21 завдяки рамі 31. Кривошип 32 пов'язаний з рамою 31 за допомогою штиря 322, який замкнено в парі коаксіальних отворів 311. Балансирна тяга 33 з’єднана з рамою 31 за допомогою штиря 35, який замкнено, відповідно, в парі коаксіальних отворів 312 і в отворі 331. Сполучна тяга 34 відповідно пов’язана з кривошипом 32 і з балансирною тягою 33 за допомогою ексцентрика 321, замкненого в отворі 341, та за допомогою штиря 36, замкненого в отворі 342 та в отворі 332. Вилки 323 і 324, що належать до кривошипа 32, геометрично виконані з можливістю певного зсуву T (як видно, наприклад, на фіг. 5) відносно площини, перпендикулярної до вісі штиря 322. Трос 1 обернено на три обороти на шків 2 з контактом із задньою поверхнею кожної сполучної тяги 34. Кожна периферійна опора 3 кінематично пов’язана з двома суміжними опорами через сполучення вилок 323 і 324, суцільних із кривошипом 32, відповідно, з першою вилкою 324a, суцільною з першим суміжним кривошипом 32a, і з другою вилкою 323b, суцільною з другим суміжним кривошипом 32b (як показано, наприклад, на фіг. 12). Кожна периферійна опора 3 є шарнірним механізмом, кінематично еквівалентним шарнірному чотирикутнику, який містить ексцентрик 321 втулкового типу, балансирну тягу 33 і 2 UA 114846 C2 5 10 15 20 25 30 35 40 45 50 55 60 сполучну тягу 34, причому остання перебуває в контакті з ділянками троса 1. Кінематичний ланцюжок, що складається з периферійних опор 3, пов’язаних через вилки 323 і 324, суцільні з кожним ексцентриком 321, створює безперервний контакт між тросом 1 і шківом 2, здатний створювати градієнт натягу, дискретний уздовж ділянки троса 1, що міститься між кінцями 11 і 12. Кінематичний ланцюжок, складений із периферійних опор 3, пов’язаних через вилки 323 і 324, на додаток до створення безперервного контакту між тросом 1 і шківом 2, дозволяє створювати мобільний контакт через відповідні силові приводи (не показано) відповідно до закону зворотно-поступального руху. Зворотно-поступальний рух кожної периферійної опори 3 є компенсованим відносно зворотно-поступального руху суміжних периферійних опор 3. Зсув між вилками 323 і 324 кожної периферійної опори 3 має довільну величину, що міститься між 0 градусів і 360 градусів. Шків 2, пов'язаний із кінематичним ланцюжком, сформованим із периферійних опор 3, забезпечує мету цього винаходу, роблячи дискретним градієнт натягу троса 1, обгорненого по периферії шківа 2 на декілька оборотів. Зокрема, прийняте рішення дозволяє: - звести до нуля градієнт натягу вздовж кожної ділянки троса, що втратила контакт із периферійною опорою 3; - виконати спіральне намотування троса 1 вздовж твірної лінії, сформованої поверхнею контакту кожної сполучної тяги 34; - отримати зворотно-поступальний і компенсований рух кожної периферійної опори 3 за допомогою механізму, кінематично еквівалентного шарнірному чотирикутнику, у найкращому варіанті створюваного за допомогою ексцентрикового ротора та сполучної тяги (фіг. 2a, 2b і 2c). Додаткові розташування, які вважаються варіантами вирішення цього винаходу, описано нижче. Зазначений зворотно-поступальний і компенсований рух кожної периферійної опори 3 виконується за посередництва механізму, кінематично еквівалентного шарнірному п’ятибічному пристрою, причому додаткова тяга (не показано) дозволяє виконувати траєкторію приблизно прямокутної форми, завдяки перекриттю додаткових гармонійних коливань. Механізм, кінематично еквівалентний шарнірному п’ятибічному пристрою, є типом, у якому дві з п’яти тяг (не показано) механічно виконані за допомогою ексцентрикових роторів, оснащених підшипниками,при цьому зазначені ексцентричні ротори мають незалежні швидкості обертання і заздалегідь визначені фази, одна із зазначених незалежних швидкостей обертання переважно втричі більша за іншу. Радіальний профіль кожної периферійної опори 3, вимірюваний у площині X-Z (фіг. 11), підпорядковується експонентній залежності, прийнятій для градієнта натягу, що змінюється вздовж троса 1. Задня поверхня кожної сполучної тяги 34, що знаходиться в контакті з ділянкою троса 1, має профіль, вимірюваний у площині X-Y (фіг. 10), із округленою по окружності формою (не показано). Кінематичний ланцюжок, сформований на периферійних опорах 3, пов'язаний за допомогою карданних шарнірів або їхніх еквівалентів. Зазначений зворотно-поступальний рух може надаватися за допомогою ексцентриків або механічних приводів. Зазначений зворотно-поступальний рух також може надаватися за допомогою електричних двигунів або електромагнітних приводів. Зазначений зворотно-поступальний рух використовується в лебідці, що містить обладнання (не показано), здатне стримувати та швидко обмежувати під час свого натягування певну величину натягу троса 1 на ділянці 11 з високим натягом, або ділянці 12 з низьким натягом. Зазначений зворотно-поступальний рух використовується в лебідці, що містить обладнання (не показано), здатне регулювати й обмежувати натяг троса 1 на ділянці 11 з високим натягом, або ділянці 12 з низьким натягом. Лебідка, що складається щонайменше з одного шківа 2, обладнаного периферійними опорами 3, підтримує й спрямовує трос 1, який обернуто на один оборот, переважно, на три обороти, при цьому зазначений трос 1 підтримується в стані 12 низького натягу. Лебідка складається з n шківів 2, обладнаних периферійними опорами 3, при цьому щонайменше двом із цих шківів надається рух від двигуна. Лебідка складається з чотирьох шківів 2 із двигунами, обладнаних периферійними опорами 3, причому вказані шківи 2 розташовані на вершинах ідеального прямокутника. 3 UA 114846 C2 Лебідка складається з чотирьох шківів 2 із двигунами, обладнаних периферійними опорами 3, причому вказані шківи 2 розташовані уздовж осей обертання, які не є взаємно паралельними. ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 1. Поліпшений шків (2) для лебідки, який контактує щонайменше з однією ділянкою троса (1), що міститься між вхідною ділянкою (11), пов'язаною з робочим навантаженням, і вихідною ділянкою (12), із мінімальним або нульовим натягом, при цьому зазначений покращений шків (2) містить кінематичний ланцюжок, сформований із периферійних опор (3), причому кожна із зазначених периферійних опор (3) є шарнірним чотирикутником, що складається щонайменше з однієї рами (31), суцільної щонайменше з одним диском (21), щонайменше одного кривошипа (32), щонайменше однієї балансирної тяги (33) і щонайменше однієї сполучної тяги (34), яка перебуває в контакті з зазначеною ділянкою зазначеного троса (1), при цьому кожна одна з зазначених периферійних опор (3) пов'язана з двома із зазначених суміжних периферійних опор (3) через сполучення вилок (323, 324), суцільних із зазначеним кривошипом (32), відповідно, із першою вилкою (324а), суцільною з першим суміжним кривошипом (32а), із другою вилкою (323b), суцільною з другим суміжним кривошипом (32b). 2. Поліпшений шків (2) за п. 1, який відрізняється тим, що кожній із зазначених периферійних опор (3) надається рух за допомогою двигуна відповідно до закону зворотно-поступального руху. 3. Поліпшений шків (2) за п. 1, який відрізняється тим, що зазначений кривошип (32) складається з ексцентрика (321) втулкового типу, внутрішню вісь якого займає штир 322, на кінцях якого розташовані зазначені вилки (323, 324), та в якому зазначені вилки (323, 324) геометрично виконані з можливістю зсуву (Т) відносно площини, перпендикулярної до зазначеної осі зазначеного штиря (322). 4. Поліпшений шків (2) за п. 3, який відрізняється тим, що зазначений зворотно-поступальний і компенсований рух кожної однієї із зазначених периферійних опор (3) виконується за посередництва механізму, кінематично еквівалентного шарнірному п'ятибічному пристрою. 5. Поліпшений шків (2) за п. 4, який відрізняється тим, що дві з п'яти тяг, що складають зазначений шарнірний п'ятибічний пристрій, механічно виконані за допомогою ексцентрикових роторів, які мають незалежні швидкості обертання і заздалегідь визначені фази, причому одна із зазначених незалежних швидкостей обертання втричі більша за іншу. 6. Поліпшений шків (2) за одним із попередніх пунктів, який відрізняється тим, що радіальний профіль кожної однієї з зазначених периферійних опор (3), вимірюваний у площині X-Z, паралельній осі обертання зазначеного шківа (2), підпорядковується експонентній залежності, прийнятій для градієнта натягу, що змінюється уздовж зазначеного троса (1). 7. Поліпшений шків (2) за будь-яким із попередніх пунктів, який відрізняється тим, що задня поверхня кожної однієї із зазначених сполучних тяг (34), що перебуває в контакті з ділянкою зазначеного троса (1), має профіль, вимірюваний у площині X-Y, перпендикулярній зазначеній осі обертання, із округленою по окружності формою. 8. Поліпшений шків (2) за будь-яким із попередніх пунктів, який відрізняється тим, що зазначений кінематичний ланцюжок, сформований із зазначених периферійних опор (3), пов'язаний за допомогою карданних шарнірів або їхніх еквівалентів, і/або зазначений зворотнопоступальний рух надається за допомогою ексцентриків або механічних приводів, електричних або електромагнітних приладів. 4 UA 114846 C2 5 UA 114846 C2 6 UA 114846 C2 7 UA 114846 C2 8 UA 114846 C2 Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюImproved pulley for high-efficiency winch
Автори англійськоюIppolito, Massimo
Автори російськоюИпполито Массимо
МПК / Мітки
МПК: B66D 1/74
Мітки: поліпшений, високоефективної, шків, лебідки
Код посилання
<a href="https://ua.patents.su/11-114846-polipshenijj-shkiv-dlya-visokoefektivno-lebidki.html" target="_blank" rel="follow" title="База патентів України">Поліпшений шків для високоефективної лебідки</a>
Шків
Номер патенту: 117807
Опубліковано: 10.07.2017
Автори: Стрілець Олег Романович, Стрілець Володимир Миколайович, Федорук Віктор Анатолійович
МПК: F16H 55/36
Мітки: шків
Формула / Реферат:
Шків, що містить обод і маточину, з'єднані між собою, який відрізняється тим, що маточина виконана суцільною та в її отворі встановлена профільна втулка у вигляді квадрата з порожнистими підковоподібними вершинами, для яких на внутрішній поверхні отвору маточини виконані чотири ідентичні підковоподібні канавки.
Регульований шків клинопасової передачі
Номер патенту: 24328
Опубліковано: 25.06.2007
Автори: Павлище Володимир Теодорович, Предко Ростислав Ярославович, Кіндрацький Богдан Ілліч
МПК: F16H 55/36
Мітки: передачі, клинопасової, шків, регульованій
Формула / Реферат:
Регульований шків клинопасової передачі, що містить встановлену на валу втулку з різьбовою ділянкою, розташовані концентрично на втулці з можливістю осьового зміщення вздовж втулки два робочі диски з маточинами та деталі фіксації робочих дисків від прокручування відносно втулки, який відрізняється тим, що втулка виконана з двома різьбовими ділянками, одна з яких має праву різьбу, інша - ліву, а кожний з двох робочих дисків виконаний з...
Шків
Номер патенту: 118122
Опубліковано: 25.07.2017
Автори: Тимейчук Орест Юрійович, Стрілець Володимир Миколайович, Стрілець Олег Романович, Федорук Віктор Анатолійович
МПК: F16H 55/36
Мітки: шків
Формула / Реферат:
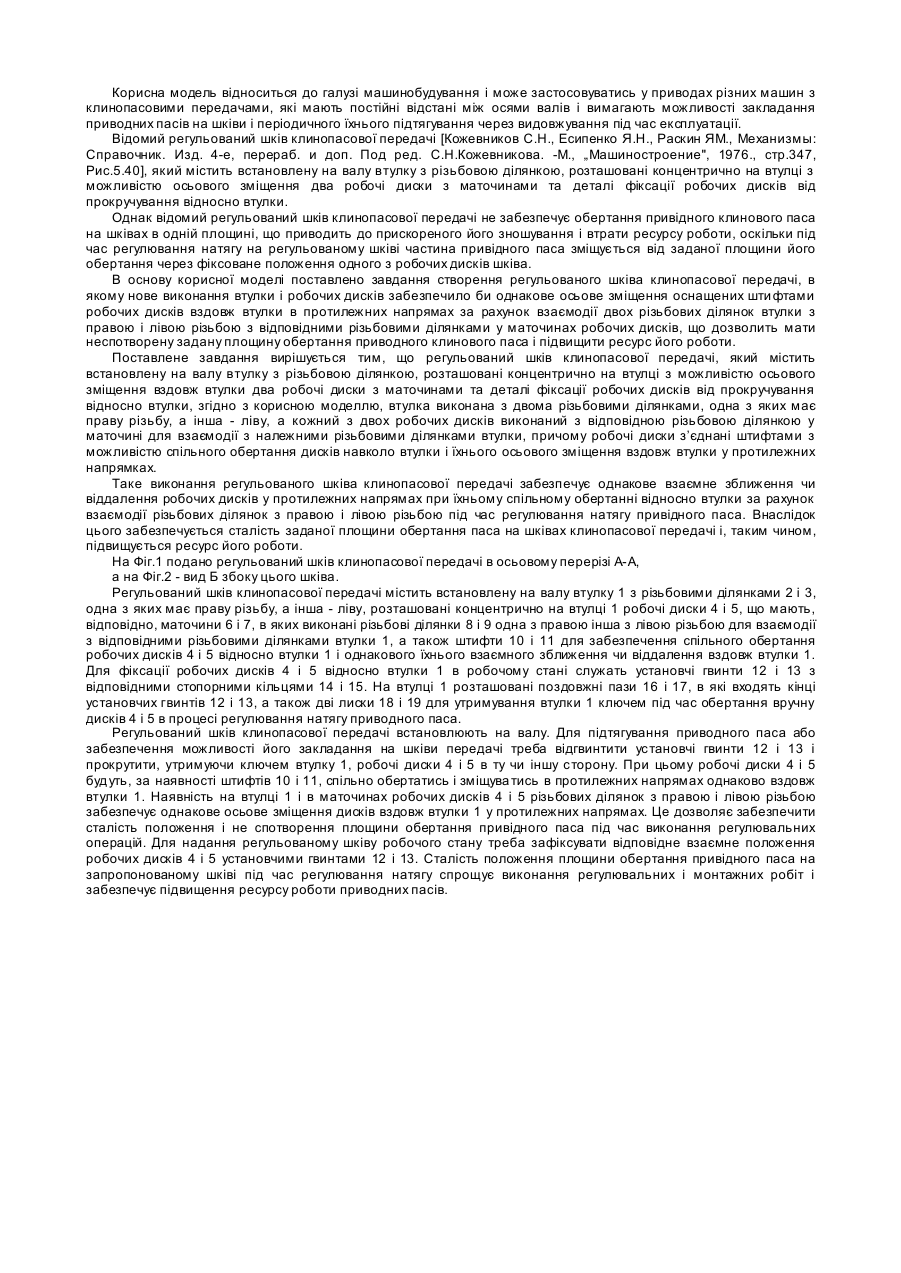
Шків, що містить обід і маточину, з'єднані між собою, який відрізняється тим, що маточина виконана з однієї частини і в отворі маточини встановлена профільна втулка, у вигляді правильного шестикутника з порожнистими підковоподібними вершинами, які входять у підковоподібні канавки на внутрішній поверхні отвору маточини.
Спосіб оброблення деталей типу “шків” торцевою фрезою
Номер патенту: 70038
Опубліковано: 25.05.2012
Автори: Равська Наталія Сергіївна, Родін Родіон Петрович, Герасимчук Олена Михайлівна
МПК: B23C 3/00
Мітки: деталей, шків, типу, оброблення, фрезою, торцевою, спосіб
Формула / Реферат:
Спосіб оброблення деталей типу "шків" торцевою фрезою, який відрізняється тим, що одна бічна поверхня профілю деталі створюється ділянкою різальної кромки, яка має форму прямої лінії, нахиленої до осі фрези, а інша бічна поверхня профілю створюється колом обертання вершинної точки різальної кромки фрези з радіусом RФ, який визначається шляхом знаходження лінії перетину поверхні деталі з площиною, проведеною перпендикулярно до осі...
Шків
Номер патенту: 117787
Опубліковано: 10.07.2017
Автори: Стрілець Олег Романович, Стрілець Володимир Миколайович, Степанюк Антон Адамович, Федорук Віктор Анатолійович
МПК: F16H 55/36
Мітки: шків
Формула / Реферат:
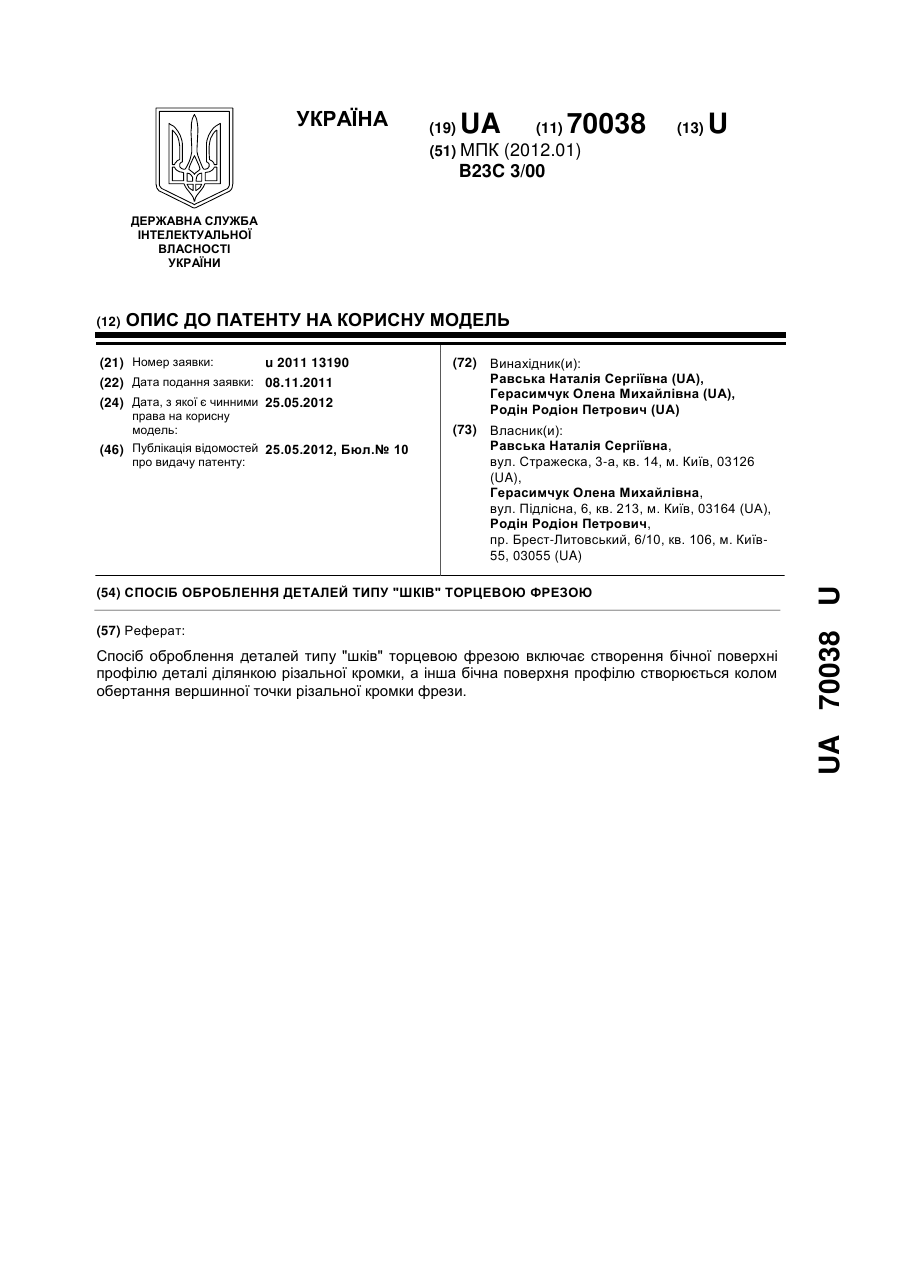
1. Шків, що містить обід і маточину, з'єднані між собою, а маточина складається з двох частин, який відрізняється тим, що обід виконаний заодно з маточиною, а у маточині встановлена профільна втулка, з поперечним перерізом у вигляді рівностороннього трикутника з порожнистими підковоподібними вершинами, а три ідентичні підковоподібні канавки виконані на внутрішній поверхні отвору маточини.2. Шків за п. 1, який відрізняється тим, що для...
Попередній патент: Спосіб очищення води від сполук урану (vi)
Наступний патент: Спосіб з’єднання труб з внутрішнім покриттям зварюванням
Випадковий патент: Спосіб оперативного визначення вмісту етилового спирту і води в автомобільному бензині