Екскаваторний модуль
Номер патенту: 116286
Опубліковано: 10.05.2017
Автори: Волкова Наталія Борисівна, Олійник Олександр Анатолійович, Григоренко Наталія Захарівна, Грибовський Михайло Леонтійович

Формула / Реферат
1. Екскаваторний модуль, що містить раму, яку встановлено на самохідне шасі, при цьому на раму позаду самохідного шасі встановлено каретку, до якої закріплено опору поворотну, при цьому до опори поворотної шарнірно закріплено стрілу, на якій шарнірно встановлено рукоять, до якої шарнірно закріплено ківш, який відрізняється тим, що рукоять виконано регульованою по довжині, при цьому рукоять складається із двох труб прямокутного профілю, а саме зовнішньої труби та внутрішньої труби, при цьому внутрішню трубу частково розташовано у зовнішній трубі із зазором та з можливістю поздовжнього переміщення внутрішньої труби у зовнішній трубі за допомогою гідроциліндра, при цьому гідроциліндр встановлено всередині внутрішньої труби та приєднано одним кінцем до внутрішньої труби, а іншим кінцем приєднано до зовнішньої труби, за допомогою двох осей, при цьому один вільний кінець будь-якої труби рукояті шарнірно приєднано до стріли екскаватора, а другий вільний кінець іншої труби рукояті шарнірно приєднано до ковша за допомогою перехідних елементів.
2. Екскаваторний модуль за п. 1, який відрізняється тим, що у кожній стінці зовнішньої труби виконано по два отвори, які розташовано на максимальній відстані між собою, при цьому в отвори встановлено вкладиші з низьким коефіцієнтом тертя, які із зазором контактують з відповідними зовнішніми стінками внутрішньої труби, при цьому кожен вкладиш ззовні закритий кришкою, яку закріплено болтами до зовнішньої труби через різьбові отвори, при цьому на кожній кришці встановлено регулювальні болти.
3. Екскаваторний модуль за п. 1, який відрізняється тим, що перехідний елемент встановлено та закріплено нерухомо на вільному кінці рукояті, який пристосовано для установки змінних пристроїв, а саме бурильного, вібраційного та для вдавлювання паль.
Текст
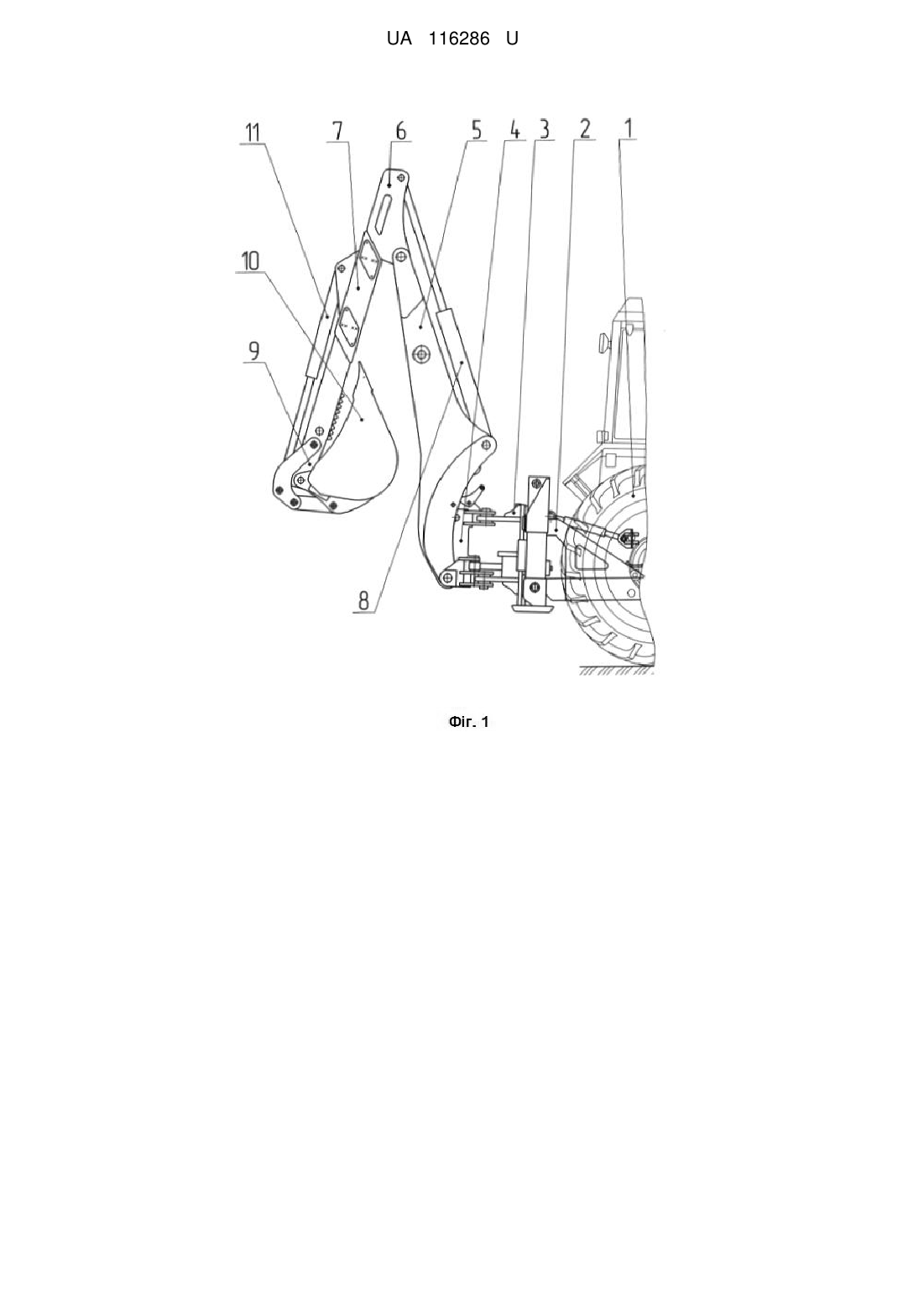
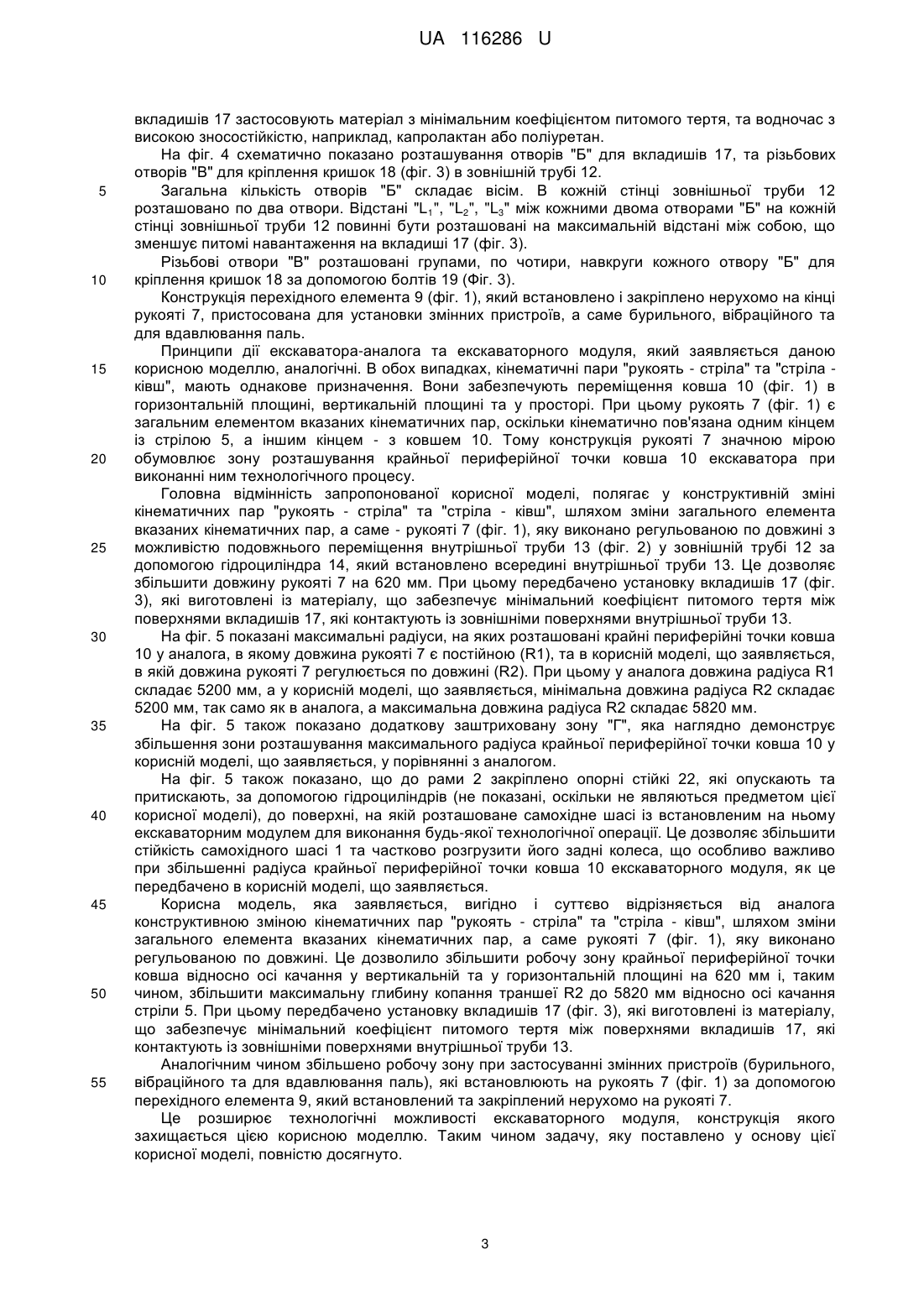
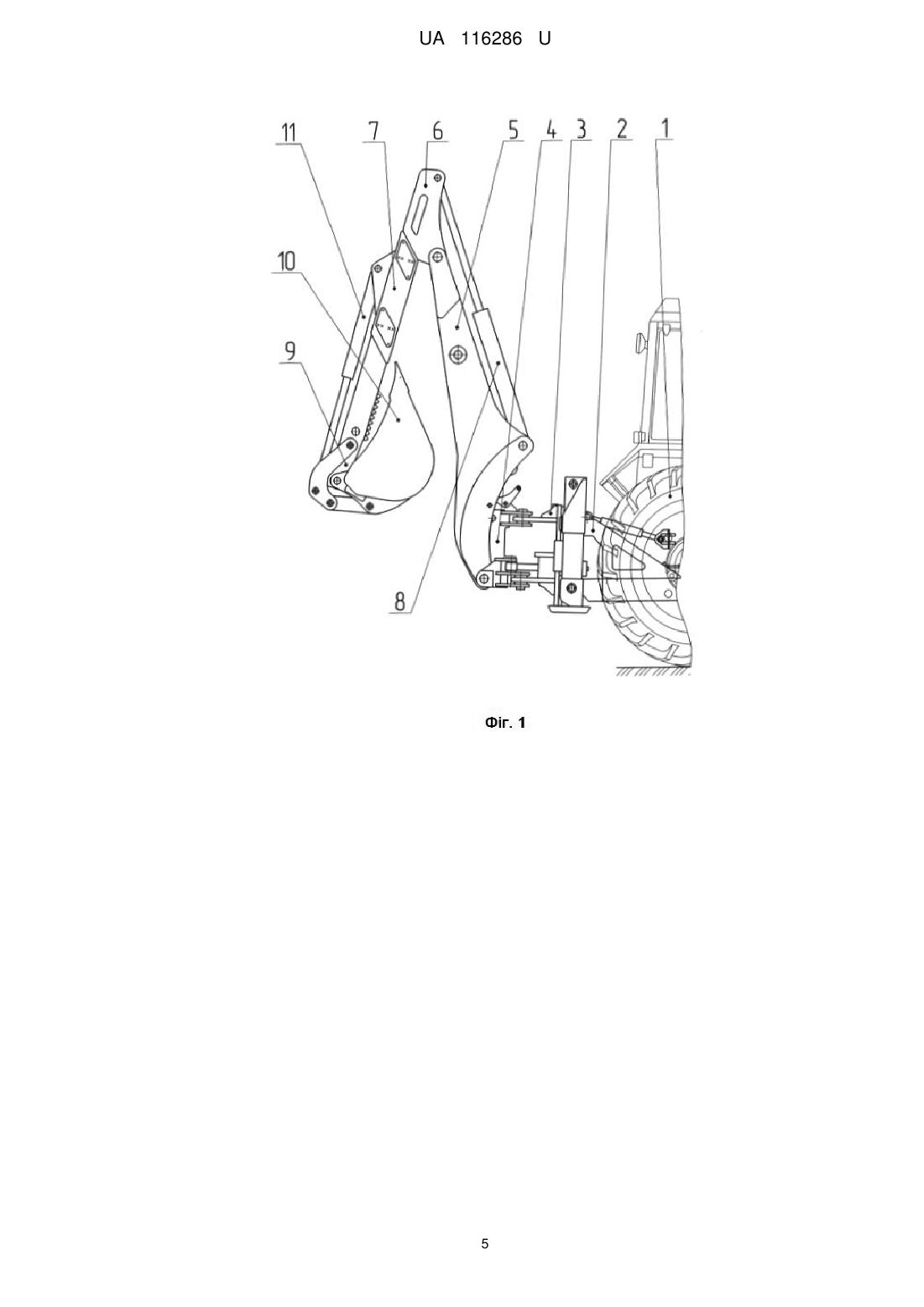
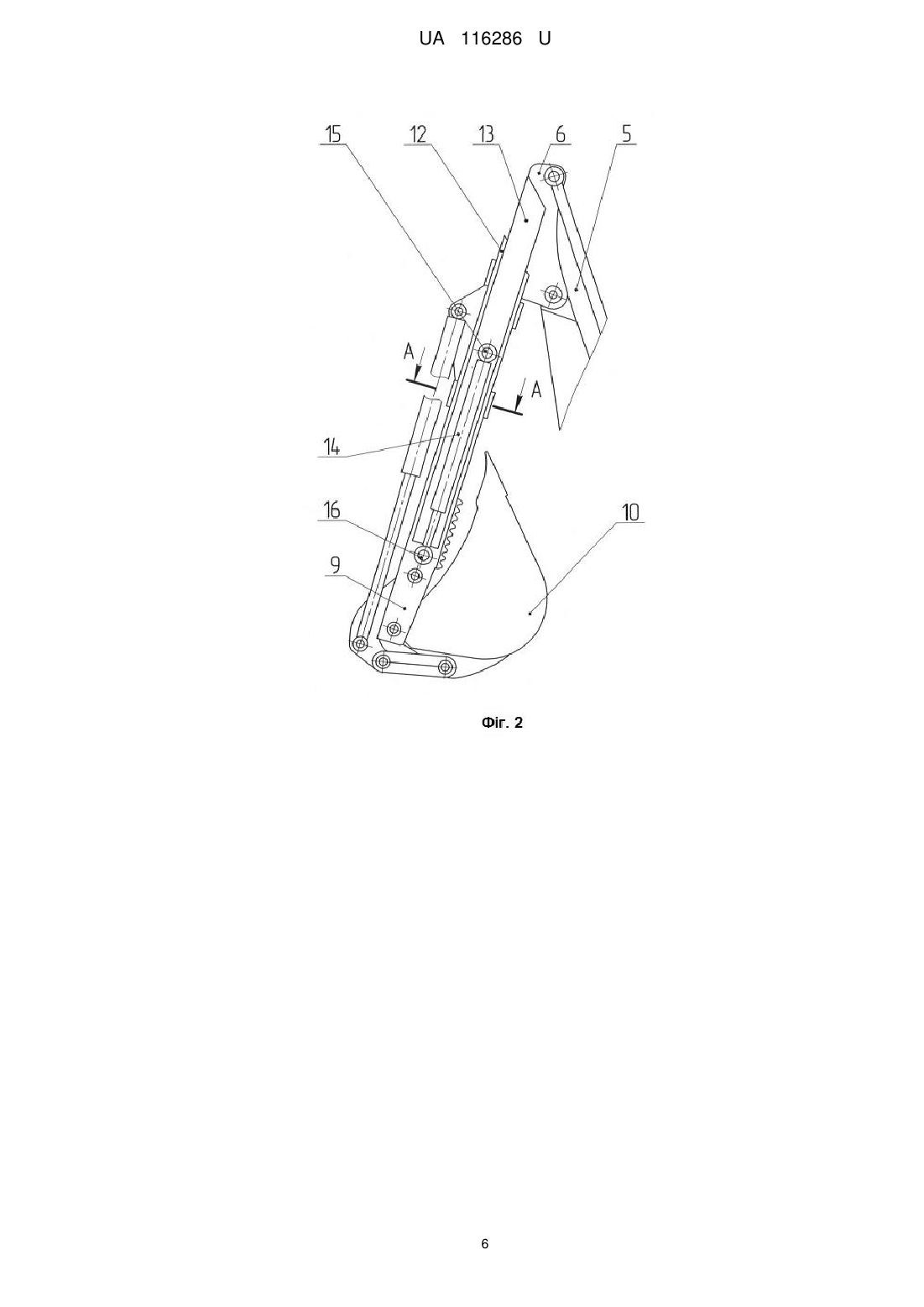
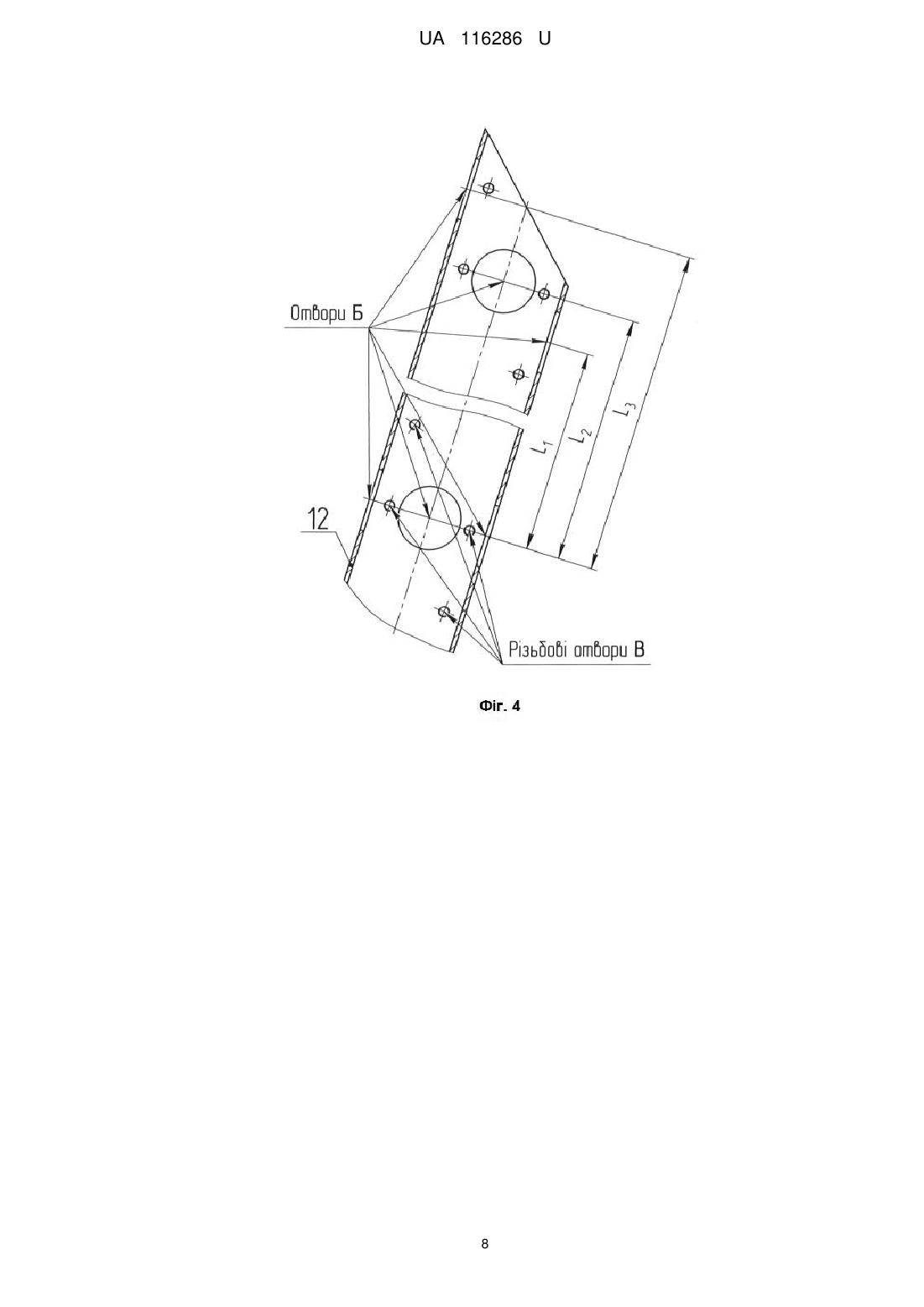
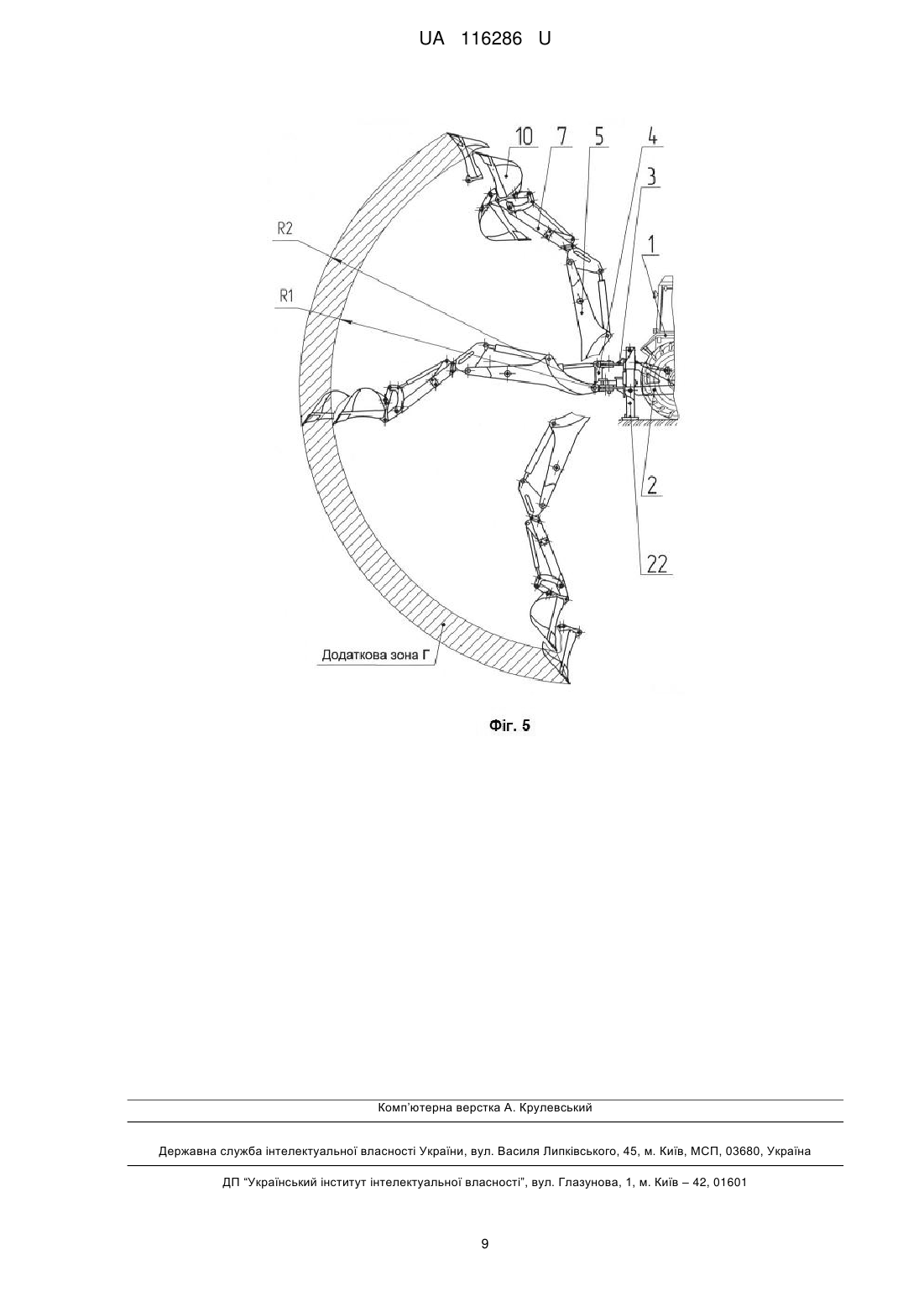
Реферат: Екскаваторний модуль містить раму, яку встановлено на самохідне шасі, при цьому на раму позаду самохідного шасі встановлено каретку, до якої закріплено опору поворотну, при цьому до опори поворотної шарнірно закріплено стрілу, на якій шарнірно встановлено рукоять, до якої шарнірно закріплено ківш. Рукоять виконано регульованою по довжині, при цьому рукоять складається із двох труб прямокутного профілю, а саме зовнішньої труби та внутрішньої труби, при цьому внутрішню трубу частково розташовано у зовнішній трубі із зазором та з можливістю поздовжнього переміщення внутрішньої труби у зовнішній трубі за допомогою гідроциліндра, при цьому гідроциліндр встановлено всередині внутрішньої труби та приєднано одним кінцем до внутрішньої труби, а іншим кінцем приєднано до зовнішньої труби, за допомогою двох осей, при цьому один вільний кінець будь-якої труби рукояті шарнірно приєднано до стріли екскаватора, а другий вільний кінець іншої труби рукояті шарнірно приєднано до ковша за допомогою перехідних елементів. UA 116286 U (12) UA 116286 U UA 116286 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до землерийнонавантажувальних машин та їх частин. Найбільше розповсюдження в Україні здобули екскаватори виробництва ПАТ "Борекс". Відомі моделі уніфікованих між собою екскаваторів, наприклад: Борекс-2206, Борекс-2401, Борекс-3101, Борекс-3106 (Інтернет: http://borex.in.ua/categorv/tovarv/ekskavatory/). Екскаватор включає раму, встановлену на самохідне шасі. На раму позаду самохідного шасі встановлено каретку. До каретки закріплено опору поворотну, до якої шарнірно закріплено стрілу. На стрілі шарнірно встановлено рукоять, до якої шарнірно закріплений ківш. Вказану вище конструкція екскаваторів прийнято як найближчий аналог. Недолік конструкції аналога полягає в тому, що при виконанні екскаваторних операцій відсутня можливість збільшувати, за потреби, відстань розташування крайньої периферійної точки ковша відносно точки качання рухомих частин екскаватора, тобто, глибину копання траншеї. Це обмежує його експлуатаційні якості та технологічні можливості. Вказаний недолік присутній також при здійсненні будь-яких інших технологічних операцій, що виконують при установці на рукоять змінних пристроїв, а саме бурильного, вібраційного та для вдавлювання паль. В основу корисної моделі поставлена задача розширення експлуатаційних можливостей екскаватора. Поставлена задача вирішується тим, що екскаваторний модуль, що містить раму, яку встановлено на самохідне шасі, при цьому на раму позаду самохідного шасі встановлено каретку, до якої закріплено опору поворотну, при цьому до опори поворотної шарнірно закріплено стрілу, на якій шарнірно встановлено рукоять, до якої шарнірно закріплено ківш, відповідно до корисної моделі рукоять виконана регульованою по довжині, при цьому рукоять складається із двох труб прямокутного профілю, а саме зовнішньої труби та внутрішньої труби, при цьому внутрішню трубу частково розташовано у зовнішній трубі із зазором та з можливістю поздовжнього переміщення внутрішньої труби у зовнішній трубі за допомогою гідроциліндра, при цьому гідроциліндр встановлено всередині внутрішньої труби та приєднано одним кінцем до внутрішньої труби, а іншим кінцем приєднано до зовнішньої труби, за допомогою двох осей, при цьому один вільний кінець будь-якої труби рукояті шарнірно приєднано до стріли екскаватора, а другий вільний кінець іншої труби рукояті шарнірно приєднаний до ковша за допомогою перехідних елементів. Також поставлена задача вирішується тим, що в екскаваторному модулі у кожній стінці зовнішньої труби виконано по два отвори, які розташовано на максимальній відстані між собою, при цьому в отвори встановлено вкладиші з низьким коефіцієнтом тертя, які із зазором контактують з відповідними зовнішніми стінками внутрішньої труби, при цьому кожен вкладиш ззовні закритий кришкою, яку закріплено болтами до зовнішньої труби через різьбові отвори, при цьому на кожній кришці встановлено регулювальні болти. Також поставлена задача вирішується тим, що в екскаваторному модулі перехідний елемент встановлено та закріплено нерухомо на вільному кінці рукояті і пристосовано для установки змінних пристроїв, а саме бурильного, вібраційного та для вдавлювання паль. Суть запропонованої корисної моделі пояснюється кресленнями, представленими на фіг. 15. Як самохідне шасі може бути використане будь-яке самохідне шасі на базі трактора. В запропонованій корисній моделі для наочного прикладу було використано самохідне шасі на базі трактора МТЗ-92П. На фіг. 1 представлено загальний вигляд екскаваторного модуля. Екскаваторний модуль навішений на самохідне шасі 1 за допомогою рами 2, встановленої на самохідному шасі 1. На рамі 2 встановлено каретку 3, яка має можливість переміщуватися у площині, перпендикулярній до повздовжньої осі самохідного шасі 1. До каретки 3 закріплено опору поворотну 4, до якої шарнірно прикріплено стрілу 5, яка має можливість розвертатися на заданий кут у вертикальній площині та горизонтальній площині. До стріли 5, через перехідний елемент 6, шарнірно прикріплено один кінець рукояті 7. Стріла 5 та рукоять 7 додатково з'єднані між собою гідроциліндром 8, який управляє поворотом рукояті 7 у вертикальній площині. До іншого кінця рукояті 7, через перехідний елемент 9 шарнірно приєднаний ківш 10. Рукоять 7 та ківш 10 додатково з'єднані між собою гідроциліндром 11, який управляє поворотом ковша 10 у вертикальній площині. Каретка 3, опора поворотна 4, стріла 5 і перехідний елемент 6 з одного боку та перехідний елемент 9 і ківш 10, з іншого боку, по конструкції та з'єднанню між собою, не відрізняються від аналога. Тому їх показано спрощено, у вигляді, достатньому для загального уявлення конструкції екскаваторного модуля, в межах предмета цієї корисної моделі. Гідроциліндри, що 1 UA 116286 U 5 10 15 20 25 30 35 40 45 50 55 60 ними управляють, не показані, оскільки не відрізняються від аналога та не є предметом цієї корисної моделі. На стрілу 5, за допомогою перехідного елемента 6, шарнірно встановлено рукоять 7, що створюють кінематичну пару "стріла - рукоять". До іншого кінця рукояті 7, за допомогою перехідного елемента 9, шарнірно закріплений ківш 10, що створюють іншу кінематичну пару "рукоять - ківш". Перехідні елементи 6 і 9 встановлені та закріплені нерухомо до обох торців рукояті 7, тому у вказаних кінематичних парах вони належать до рукояті 7. Окремі елементи вказаних вище кінематичних пар "стріла - рукоять" та "рукоять - ківш" по різному впливають на можливість збільшення глибини копання траншеї екскаватором, яку характеризує максимальна відстань розташування крайньої периферійної точки ковша 10 відносно осі качання рухомих частин екскаватора. Збільшення довжини стріли 5 збільшує максимальний габаритний розмір по висоті екскаватора у транспортному положенні. Тому, збільшення довжини стріли 5 вкрай небажано. Ківш 10, при виконанні технологічних операцій екскаватором, безпосередньо контактує з технологічним продуктом. Розміри ковша 10 залежать від потужності двигуна самохідного шасі 1 та його вантажопідйомності. Стале виконання технологічного процесу ковшем 10 обумовлено оптимальними співвідношеннями його глибини, ширини і висоти. Ці співвідношення встановлені багаторічною практикою та витримуються у конструкціях ковшів відомих екскаваторів, залежно від вказаних вище умов. У нашому випадку оптимальні співвідношення глибини, ширини і висоти ковша 10 також збережені. Тому, збільшити тільки довжину ковша неможливо, оскільки це порушить оптимальне співвідношення його глибини, ширини і висоти, що призведе до порушення сталого виконання технологічного процесу. Рукоять 7 є загальним елементом кінематичних пар "стріла - рукоять" і "рукоять - ківш", оскільки вона кінематично пов'язана одним кінцем із стрілою 5, через перехідний елемент 6, а іншим кінцем кінематично пов'язана з ківшем 10 через перехідний елемент 9. Збільшення довжини, саме рукояті 7, дає можливість збільшити глибину копання траншеї екскаватором, яку характеризує відстань розташування крайньої периферійної точки ковша 10 відносно осі качання рухомих частин екскаваторного модуля. При цьому рукоять 7 має можливість повороту у вертикальній площині та шарнірно з'єднана із стрілою 5, яка має можливість розвертатися на заданий кут у вертикальній площині та у горизонтальній площині. Ківш 10, кінематично з'єднаний з рукояттю 7, має можливість розвертатися на заданий кут у вертикальній площині. На фіг. 2 більш детально показаний повздовжній розріз рукояті 7 (фіг. 1). Вона складається із внутрішньої труби 13, яку частково розташовано у зовнішній трубі 12, гідроциліндра 14, який розташований всередині внутрішньої труби 13. Однин кінець гідроциліндра 14 закріплено до внутрішньої труби 13 за допомогою осі 15. Інший кінець гідроциліндра 14 закріплено до зовнішньої труби 12 за допомогою іншої осі 16. Конструкцію рукояті 7 (фіг. 1), яка має можливість змінювати свою довжину, виконано таким чином, що внутрішню трубу 13 одним кінцем через посередництво перехідного елемента 6 шарнірно закріплено до стріли 5, а інший її кінець частково вставлений у зовнішню трубу 12. До вільного кінця зовнішньої труби 12 за допомогою перехідного елемента 9 шарнірно приєднаний ківш 10. Можливий інший варіант конструкції рукояті 7 (фіг. 1), в якій передбачене регулювання по довжині. В цьому випадку рукоять 7 виконано таким чином, що зовнішню трубу 12 одним кінцем через перехідний елемент 6 шарнірно закріплено до стріли 5, а в інший її кінець частково встановлено внутрішню трубу 13. До вільного кінця внутрішньої труби 13 через перехідний елемент 9 шарнірно приєднаний ківш 10. В обох варіантах конструкції рукояті 7 (фіг. 1), яку можливо регулювати по довжині, гідроциліндр 14 розташований всередині внутрішньої труби 13 з можливістю встановлювати його штоком, як у напрямку до стріли 5, так і у напрямку до ковша 10. В конструкції, що заявляється цією корисною моделлю, гідроциліндр 14 розташований штоком у напрямку до ковша 10. На фіг. 3 представлено поперечний розтин в площині А-А, рукояті 7 (фіг. 1, 2) на якому показано установку вкладишів 17, які виготовлені із матеріалу, що забезпечує мінімальний коефіцієнт питомого тертя між вкладишами 17 та зовнішніми поверхнями внутрішньої труби 13. В отвори "Б" встановлені вкладиші 17, які забезпечують більш плавне переміщення внутрішньої труби 13 у зовнішній трубі 12. Із зовнішньої сторони кожний вкладиш 17 закрито кришкою 18, яку прикріплено болтами 19 до відповідної стінки зовнішньої труби 12 через різьбові отвори "В", розташування яких показані також на фіг. 4. При зносі вкладишів 17 його компенсують за допомогою регулювальних болтів 20 з контргайками 21. Для виготовлення 2 UA 116286 U 5 10 15 20 25 30 35 40 45 50 55 вкладишів 17 застосовують матеріал з мінімальним коефіцієнтом питомого тертя, та водночас з високою зносостійкістю, наприклад, капролактан або поліуретан. На фіг. 4 схематично показано розташування отворів "Б" для вкладишів 17, та різьбових отворів "В" для кріплення кришок 18 (фіг. 3) в зовнішній трубі 12. Загальна кількість отворів "Б" складає вісім. В кожній стінці зовнішньої труби 12 розташовано по два отвори. Відстані "L1", "L2", "L3" між кожними двома отворами "Б" на кожній стінці зовнішньої труби 12 повинні бути розташовані на максимальній відстані між собою, що зменшує питомі навантаження на вкладиші 17 (фіг. 3). Різьбові отвори "В" розташовані групами, по чотири, навкруги кожного отвору "Б" для кріплення кришок 18 за допомогою болтів 19 (Фіг. 3). Конструкція перехідного елемента 9 (фіг. 1), який встановлено і закріплено нерухомо на кінці рукояті 7, пристосована для установки змінних пристроїв, а саме бурильного, вібраційного та для вдавлювання паль. Принципи дії екскаватора-аналога та екскаваторного модуля, який заявляється даною корисною моделлю, аналогічні. В обох випадках, кінематичні пари "рукоять - стріла" та "стріла ківш", мають однакове призначення. Вони забезпечують переміщення ковша 10 (фіг. 1) в горизонтальній площині, вертикальній площині та у просторі. При цьому рукоять 7 (фіг. 1) є загальним елементом вказаних кінематичних пар, оскільки кінематично пов'язана одним кінцем із стрілою 5, а іншим кінцем - з ковшем 10. Тому конструкція рукояті 7 значною мірою обумовлює зону розташування крайньої периферійної точки ковша 10 екскаватора при виконанні ним технологічного процесу. Головна відмінність запропонованої корисної моделі, полягає у конструктивній зміні кінематичних пар "рукоять - стріла" та "стріла - ківш", шляхом зміни загального елемента вказаних кінематичних пар, а саме - рукояті 7 (фіг. 1), яку виконано регульованою по довжині з можливістю подовжнього переміщення внутрішньої труби 13 (фіг. 2) у зовнішній трубі 12 за допомогою гідроциліндра 14, який встановлено всередині внутрішньої труби 13. Це дозволяє збільшити довжину рукояті 7 на 620 мм. При цьому передбачено установку вкладишів 17 (фіг. 3), які виготовлені із матеріалу, що забезпечує мінімальний коефіцієнт питомого тертя між поверхнями вкладишів 17, які контактують із зовнішніми поверхнями внутрішньої труби 13. На фіг. 5 показані максимальні радіуси, на яких розташовані крайні периферійні точки ковша 10 у аналога, в якому довжина рукояті 7 є постійною (R1), та в корисній моделі, що заявляється, в якій довжина рукояті 7 регулюється по довжині (R2). При цьому у аналога довжина радіуса R1 складає 5200 мм, а у корисній моделі, що заявляється, мінімальна довжина радіуса R2 складає 5200 мм, так само як в аналога, а максимальна довжина радіуса R2 складає 5820 мм. На фіг. 5 також показано додаткову заштриховану зону "Г", яка наглядно демонструє збільшення зони розташування максимального радіуса крайньої периферійної точки ковша 10 у корисній моделі, що заявляється, у порівнянні з аналогом. На фіг. 5 також показано, що до рами 2 закріплено опорні стійкі 22, які опускають та притискають, за допомогою гідроциліндрів (не показані, оскільки не являються предметом цієї корисної моделі), до поверхні, на якій розташоване самохідне шасі із встановленим на ньому екскаваторним модулем для виконання будь-якої технологічної операції. Це дозволяє збільшити стійкість самохідного шасі 1 та частково розгрузити його задні колеса, що особливо важливо при збільшенні радіуса крайньої периферійної точки ковша 10 екскаваторного модуля, як це передбачено в корисній моделі, що заявляється. Корисна модель, яка заявляється, вигідно і суттєво відрізняється від аналога конструктивною зміною кінематичних пар "рукоять - стріла" та "стріла - ківш", шляхом зміни загального елемента вказаних кінематичних пар, а саме рукояті 7 (фіг. 1), яку виконано регульованою по довжині. Це дозволило збільшити робочу зону крайньої периферійної точки ковша відносно осі качання у вертикальній та у горизонтальній площині на 620 мм і, таким чином, збільшити максимальну глибину копання траншеї R2 до 5820 мм відносно осі качання стріли 5. При цьому передбачено установку вкладишів 17 (фіг. 3), які виготовлені із матеріалу, що забезпечує мінімальний коефіцієнт питомого тертя між поверхнями вкладишів 17, які контактують із зовнішніми поверхнями внутрішньої труби 13. Аналогічним чином збільшено робочу зону при застосуванні змінних пристроїв (бурильного, вібраційного та для вдавлювання паль), які встановлюють на рукоять 7 (фіг. 1) за допомогою перехідного елемента 9, який встановлений та закріплений нерухомо на рукояті 7. Це розширює технологічні можливості екскаваторного модуля, конструкція якого захищається цією корисною моделлю. Таким чином задачу, яку поставлено у основу цієї корисної моделі, повністю досягнуто. 3 UA 116286 U Ефективність корисної моделі, що заявляється, у порівнянні з аналогом, підтверджено випробуваннями дослідного зразка екскаватора-навантажувача з використанням самохідного шасі на базі трактора МТЗ-92П, який був виготовлений ТОВ НВО "Херсонський машинобудівний завод" у 2016 році. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 1. Екскаваторний модуль, що містить раму, яку встановлено на самохідне шасі, при цьому на раму позаду самохідного шасі встановлено каретку, до якої закріплено опору поворотну, при цьому до опори поворотної шарнірно закріплено стрілу, на якій шарнірно встановлено рукоять, до якої шарнірно закріплено ківш, який відрізняється тим, що рукоять виконано регульованою по довжині, при цьому рукоять складається із двох труб прямокутного профілю, а саме зовнішньої труби та внутрішньої труби, при цьому внутрішню трубу частково розташовано у зовнішній трубі із зазором та з можливістю поздовжнього переміщення внутрішньої труби у зовнішній трубі за допомогою гідроциліндра, при цьому гідроциліндр встановлено всередині внутрішньої труби та приєднано одним кінцем до внутрішньої труби, а іншим кінцем приєднано до зовнішньої труби, за допомогою двох осей, при цьому один вільний кінець будь-якої труби рукояті шарнірно приєднано до стріли екскаватора, а другий вільний кінець іншої труби рукояті шарнірно приєднано до ковша за допомогою перехідних елементів. 2. Екскаваторний модуль за п. 1, який відрізняється тим, що у кожній стінці зовнішньої труби виконано по два отвори, які розташовано на максимальній відстані між собою, при цьому в отвори встановлено вкладиші з низьким коефіцієнтом тертя, які із зазором контактують з відповідними зовнішніми стінками внутрішньої труби, при цьому кожен вкладиш ззовні закритий кришкою, яку закріплено болтами до зовнішньої труби через різьбові отвори, при цьому на кожній кришці встановлено регулювальні болти. 3. Екскаваторний модуль за п. 1, який відрізняється тим, що перехідний елемент встановлено та закріплено нерухомо на вільному кінці рукояті, який пристосовано для установки змінних пристроїв, а саме бурильного, вібраційного та для вдавлювання паль. 4 UA 116286 U 5 UA 116286 U 6 UA 116286 U 7 UA 116286 U 8 UA 116286 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: екскаваторний, модуль
Код посилання
<a href="https://ua.patents.su/11-116286-ekskavatornijj-modul.html" target="_blank" rel="follow" title="База патентів України">Екскаваторний модуль</a>
Робоче обладнання екскаватора
Номер патенту: 12574
Опубліковано: 15.02.2006
Автори: Деримедведь Денис Валерійович, Соколов Ігор Анатолійович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: робоче, обладнання, екскаватора
Формула / Реферат:
Робоче обладнання екскаватора, що містить стрілу, рукоять, ківш, гідроциліндри керування стрілою, рукоять і робочий орган, яке відрізняється тим, що воно додатково оснащено змінним модулем у вигляді порожнистого корпусу з металопрокату для подовження рукояті.
Екскаваторний пристрій та екскаваторний пристрій для використання з тягачем
Номер патенту: 27958
Опубліковано: 16.10.2000
Автор: Гілхоуд Джек
Мітки: пристрій, тягачем, екскаваторний, використання
Текст:
...в н ужном положении в нижней части средства для выкапывания грунта. В соответствии с этим, изобретение описывает дугообразную траекторию и сенсорное средство, которое крепится таким образом, что оно может двигаться по этой траектории. Предпочтительно, для регулирования движения датчика по указанной траектории предусмотрены контрольные средства, соединенные со средством для выявления изменения положения трактора относительно опорного сигнала. В...
Екскаваторний робочий орган прохідницького щита
Номер патенту: 1535
Опубліковано: 25.07.1994
Автори: Трубчанін Віктор Іванович, Нестеренко Віталій Григорович, Фішман Йосип Давидович, Проніна Тетяна Василівна, Мірошников Юрій Миколайович, Зенін Костянтин Михайлович
МПК: E21D 9/06
Мітки: прохідницького, робочий, щита, екскаваторний, орган
Формула / Реферат:
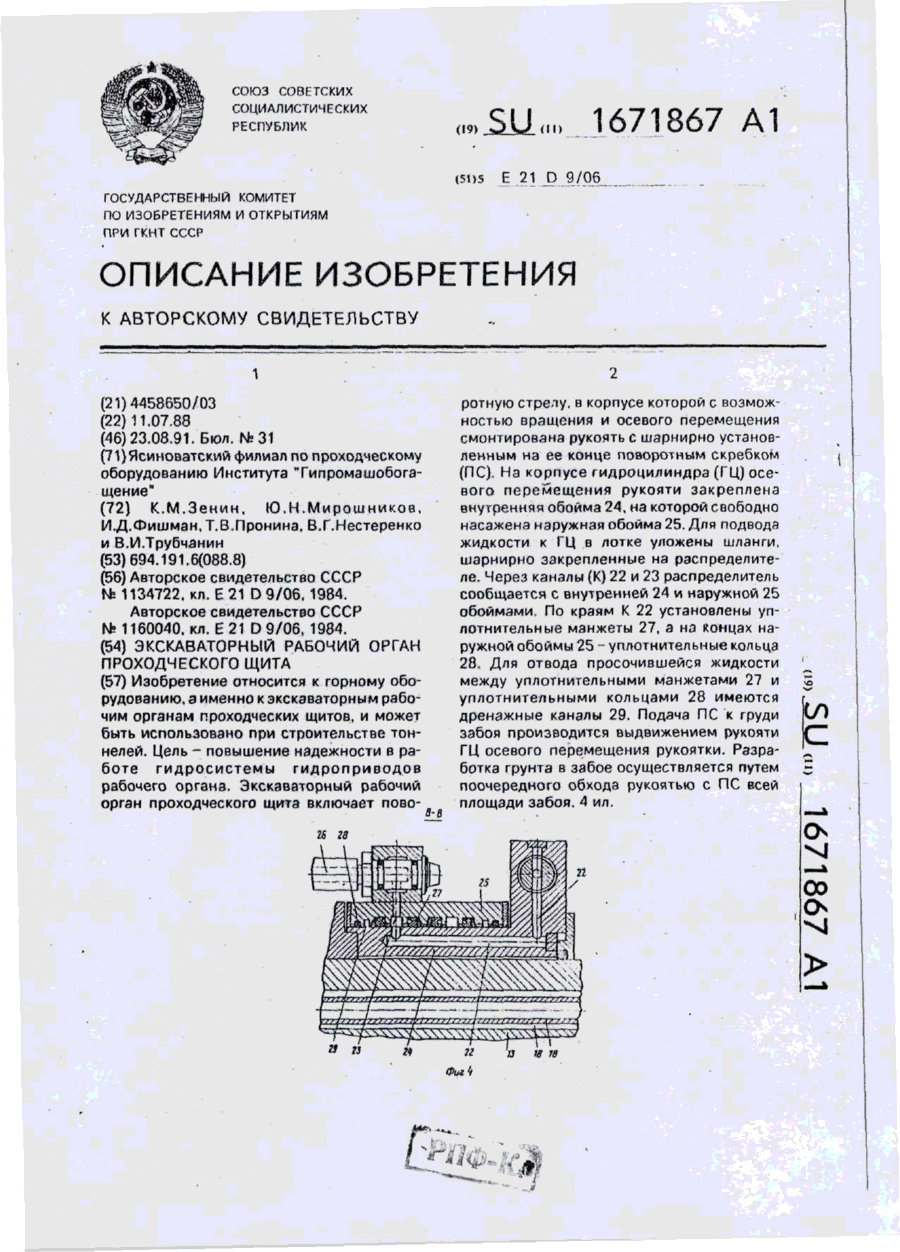
Экскаваторный рабочий орган проходческого щита, включающий поворотную стрелу, в корпусе которой установлена с возможностью вращения и осевого перемещения рукоять с шарнирно установленным на ее конце поворотным скребком, гидроцилиндр поворота стрелы, привод вращения рукояти и гидроцилиндр осевого перемещения, шток которого соединен с корпусом поворотной стрелы, а корпус - с рукоятью, отличающийся тем, что, с целью повышения надежности работы...
Екскаваторний робочий орган прохідницького щита
Номер патенту: 1532
Опубліковано: 25.07.1994
Автори: Алексеєв Геннадій Георгійович, Зенін Костянтин Михайлович, Мельников Іван Йосипович, Мірошников Юрій Миколайович, Яроцький Микола Іванович, Фішман Йосип Давидович
МПК: E21D 9/06
Мітки: екскаваторний, орган, щита, прохідницького, робочий
Формула / Реферат:
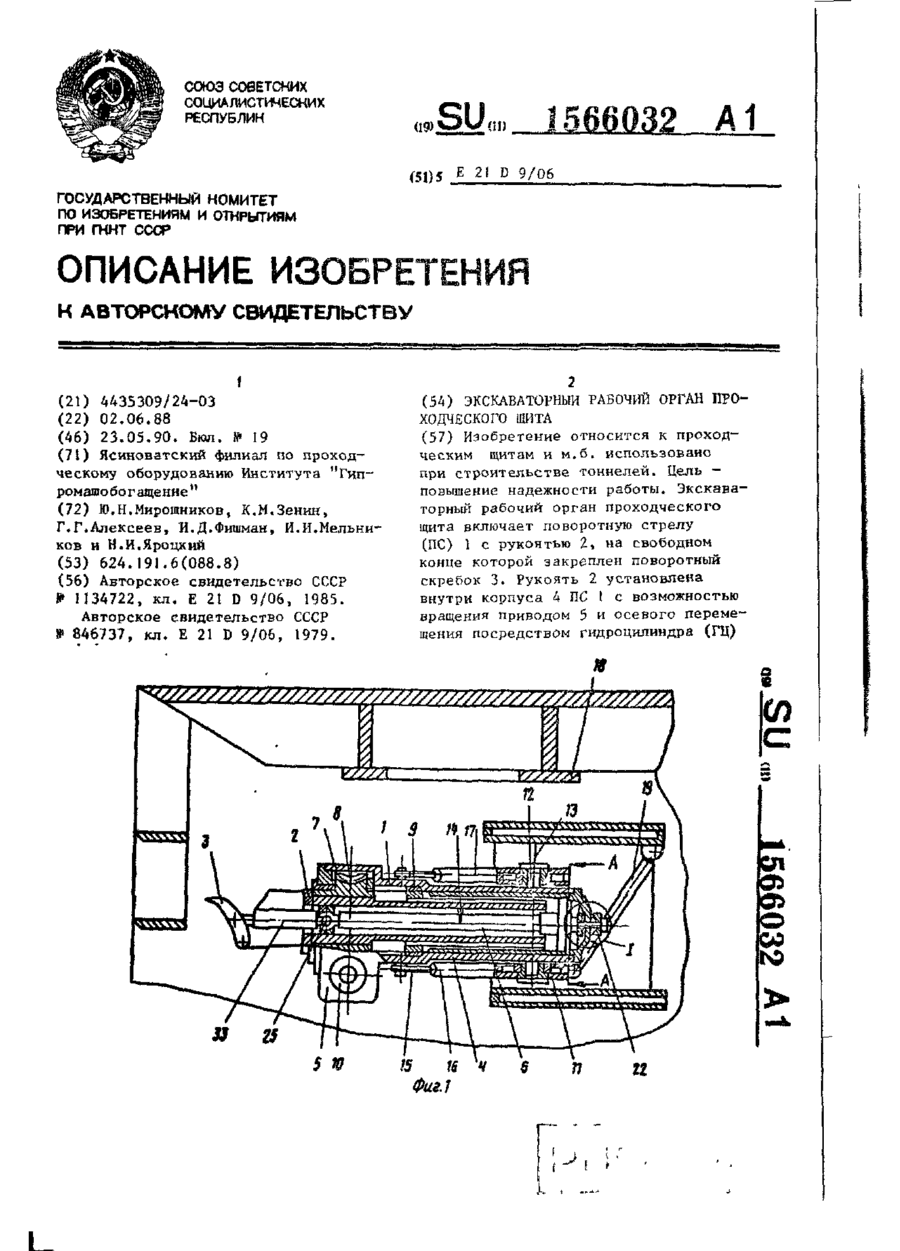
Экскаваторный рабочий орган проходческого щита, включающий поворотную стрелу, шарнирно связанную с корпусом щита с возможностью горизонтального и вертикального поворота, рукоять, установленную в корпусе стрелы с возможностью вращения и осевого перемещения, поворотный скребок, шарнирно закрепленный на конце рукояти и связанный с рукоятью посредством гидроцилиндра, привод вращения рукояти, жестко закрепленный на корпусе стрелы, и привод...
Робоче обладнання одноківшевого екскаватора
Номер патенту: 75318
Опубліковано: 26.11.2012
Автори: Дахно Олег Олександрович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: робоче, одноківшевого, обладнання, екскаватора
Формула / Реферат:
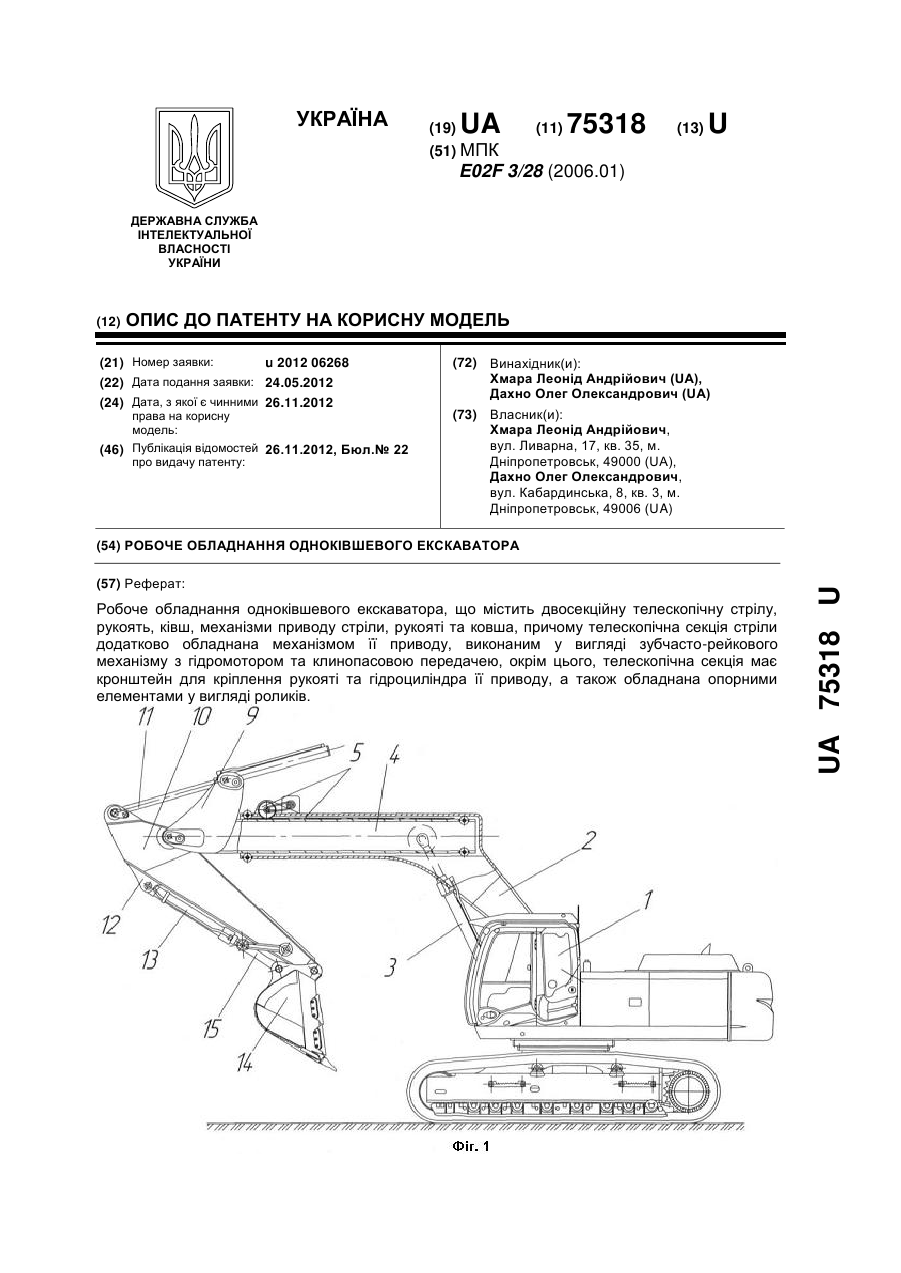
Робоче обладнання одноківшевого екскаватора, що містить двосекційну телескопічну стрілу, рукоять, ківш, механізми приводу стріли, рукояті та ковша, яке відрізняється тим, що телескопічна секція стріли додатково обладнана механізмом її приводу, виконаним у вигляді зубчасто-рейкового механізму з гідромотором та клинопасовою передачею, окрім цього, телескопічна секція має кронштейн для кріплення рукояті та гідроциліндра її приводу, а також...
Попередній патент: Спосіб скринінгової діагностики доброякісної і злоякісної патології молочної залози
Наступний патент: Головка глибокого свердління
Випадковий патент: Гірка настойка "грація"